JP6457151B2 - 電気活性又は光活性ポリマーに基づくアクチュエータ又はセンサ装置 - Google Patents
電気活性又は光活性ポリマーに基づくアクチュエータ又はセンサ装置 Download PDFInfo
- Publication number
- JP6457151B2 JP6457151B2 JP2018510357A JP2018510357A JP6457151B2 JP 6457151 B2 JP6457151 B2 JP 6457151B2 JP 2018510357 A JP2018510357 A JP 2018510357A JP 2018510357 A JP2018510357 A JP 2018510357A JP 6457151 B2 JP6457151 B2 JP 6457151B2
- Authority
- JP
- Japan
- Prior art keywords
- layer
- active layer
- actuator
- carrier layer
- actuating
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images














Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F03—MACHINES OR ENGINES FOR LIQUIDS; WIND, SPRING, OR WEIGHT MOTORS; PRODUCING MECHANICAL POWER OR A REACTIVE PROPULSIVE THRUST, NOT OTHERWISE PROVIDED FOR
- F03G—SPRING, WEIGHT, INERTIA OR LIKE MOTORS; MECHANICAL-POWER PRODUCING DEVICES OR MECHANISMS, NOT OTHERWISE PROVIDED FOR OR USING ENERGY SOURCES NOT OTHERWISE PROVIDED FOR
- F03G7/00—Mechanical-power-producing mechanisms, not otherwise provided for or using energy sources not otherwise provided for
- F03G7/008—Mechanical-power-producing mechanisms, not otherwise provided for or using energy sources not otherwise provided for characterised by the actuating element
- F03G7/012—Electro-chemical actuators
- F03G7/0121—Electroactive polymers
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F03—MACHINES OR ENGINES FOR LIQUIDS; WIND, SPRING, OR WEIGHT MOTORS; PRODUCING MECHANICAL POWER OR A REACTIVE PROPULSIVE THRUST, NOT OTHERWISE PROVIDED FOR
- F03G—SPRING, WEIGHT, INERTIA OR LIKE MOTORS; MECHANICAL-POWER PRODUCING DEVICES OR MECHANISMS, NOT OTHERWISE PROVIDED FOR OR USING ENERGY SOURCES NOT OTHERWISE PROVIDED FOR
- F03G7/00—Mechanical-power-producing mechanisms, not otherwise provided for or using energy sources not otherwise provided for
- F03G7/005—Electro-chemical actuators; Actuators having a material for absorbing or desorbing gas, e.g. a metal hydride; Actuators using the difference in osmotic pressure between fluids; Actuators with elements stretchable when contacted with liquid rich in ions, with UV light, with a salt solution
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B32—LAYERED PRODUCTS
- B32B—LAYERED PRODUCTS, i.e. PRODUCTS BUILT-UP OF STRATA OF FLAT OR NON-FLAT, e.g. CELLULAR OR HONEYCOMB, FORM
- B32B7/00—Layered products characterised by the relation between layers; Layered products characterised by the relative orientation of features between layers, or by the relative values of a measurable parameter between layers, i.e. products comprising layers having different physical, chemical or physicochemical properties; Layered products characterised by the interconnection of layers
- B32B7/04—Interconnection of layers
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F03—MACHINES OR ENGINES FOR LIQUIDS; WIND, SPRING, OR WEIGHT MOTORS; PRODUCING MECHANICAL POWER OR A REACTIVE PROPULSIVE THRUST, NOT OTHERWISE PROVIDED FOR
- F03G—SPRING, WEIGHT, INERTIA OR LIKE MOTORS; MECHANICAL-POWER PRODUCING DEVICES OR MECHANISMS, NOT OTHERWISE PROVIDED FOR OR USING ENERGY SOURCES NOT OTHERWISE PROVIDED FOR
- F03G7/00—Mechanical-power-producing mechanisms, not otherwise provided for or using energy sources not otherwise provided for
- F03G7/008—Mechanical-power-producing mechanisms, not otherwise provided for or using energy sources not otherwise provided for characterised by the actuating element
- F03G7/009—Actuators with elements stretchable when contacted with liquid rich in ions, with UV light or with a salt solution
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F03—MACHINES OR ENGINES FOR LIQUIDS; WIND, SPRING, OR WEIGHT MOTORS; PRODUCING MECHANICAL POWER OR A REACTIVE PROPULSIVE THRUST, NOT OTHERWISE PROVIDED FOR
- F03G—SPRING, WEIGHT, INERTIA OR LIKE MOTORS; MECHANICAL-POWER PRODUCING DEVICES OR MECHANISMS, NOT OTHERWISE PROVIDED FOR OR USING ENERGY SOURCES NOT OTHERWISE PROVIDED FOR
- F03G7/00—Mechanical-power-producing mechanisms, not otherwise provided for or using energy sources not otherwise provided for
- F03G7/008—Mechanical-power-producing mechanisms, not otherwise provided for or using energy sources not otherwise provided for characterised by the actuating element
- F03G7/016—Photosensitive actuators, e.g. using the principle of Crookes radiometer
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N—ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N30/00—Piezoelectric or electrostrictive devices
- H10N30/20—Piezoelectric or electrostrictive devices with electrical input and mechanical output, e.g. functioning as actuators or vibrators
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N—ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N30/00—Piezoelectric or electrostrictive devices
- H10N30/20—Piezoelectric or electrostrictive devices with electrical input and mechanical output, e.g. functioning as actuators or vibrators
- H10N30/204—Piezoelectric or electrostrictive devices with electrical input and mechanical output, e.g. functioning as actuators or vibrators using bending displacement, e.g. unimorph, bimorph or multimorph cantilever or membrane benders
- H10N30/2041—Beam type
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N—ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N30/00—Piezoelectric or electrostrictive devices
- H10N30/80—Constructional details
- H10N30/85—Piezoelectric or electrostrictive active materials
- H10N30/857—Macromolecular compositions
Description
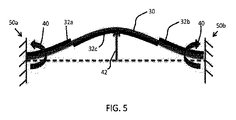
本発明は、(電気活性及び/又は光活性ポリマーを含む)活性層と受動キャリア層とを有するアクチュエータ装置を含むアクチュエータ及び/又はセンサ機器を提供し、アクチュエータ装置は固定された両端部の間に延びる。ポリマー装置は、受動キャリア層と活性ポリマー層とを含み、端部において又は端部に隣接して、キャリア層及び活性ポリマー層は、第1の順序で一方が他方の上に取り付けられ、端部同士の間の中間領域において、キャリア層及び活性層は、逆の順序で取り付けられる。

皮膚を緊張させる又はしわを減らすために、皮膚に一定の又は周期的なストレッチを適用する、応答性ポリマーベースの皮膚パッチの形態の皮膚作動装置等の皮膚美容処置;
交互の正常な圧力を皮膚に与えて顔面の赤いあざを低減又は防止する、反応性ポリマーベースの活性クッション又はシールを有する患者インターフェイスマスクを有する呼吸装置;
適応シェービングヘッドを有する電気シェーバー。近接性と炎症との間のバランスに影響を与えるために、反応性ポリマーアクチュエータを使用して、皮膚接触面の高さを調節することができる;
特に歯と歯との間の空間においてスプレーの到達範囲を改善するための動的ノズルアクチュエータを有するエアーフロス等の口腔洗浄装置。代替的に、活性化したタフトが設けられた歯ブラシ;
ユーザインタフェース内に又はその近くに統合された応答性ポリマートランスデューサのアレイを介して局所的な触覚フィードバックを提供する家電装置又はタッチパネル;
蛇行する血管内での容易なナビゲーションを可能にするための操縦可能なチップを有するカテーテル;である。
Claims (15)
- アクチュエータ及び/又はセンサ装置であって、当該装置は、
固定された両端部の間に延びる作動装置を有しており、
該作動装置は、
電気活性ポリマー及び/又は光活性ポリマーを含む活性層と、
受動キャリア層と、を含む層スタックを有しており、
前記固定された両端部の少なくとも一方において又はこれに隣接して、前記キャリア層及び前記活性層は、第1の順序で一方が他方の上に取り付けられ、前記固定された両端部の間の中間領域において、前記キャリア層及び前記活性層は、第1の順序とは反対の第2の順序で他方が一方の上に取り付けられる、
装置。 - ベースを有しており、
前記作動装置は、前記中間領域において、前記ベースに対して上向きに屈曲するように適合され、
前記キャリア層は、前記固定された両端部の少なくとも一方において又はこれに隣接して前記活性層の上にあり、前記活性層は、前記中間領域において前記キャリア層の上にある、請求項1に記載の装置。 - 前記作動装置は、前記活性層及び前記受動キャリア層によって少なくとも前記固定された両端部に接続される、請求項1又は2に記載の装置。
- 前記作動装置は、前記活性層のみによって前記固定された両端部の少なくとも一方に接続される、請求項1又は2に記載の装置。
- 前記受動キャリア層は、端部分及び中間部分を含み、前記中間部分は、前記端部分に対して、連続的な活性層の反対側に取り付けられる、請求項1乃至4のいずれか一項に記載の装置。
- 前記活性層は、端部分及び中間部分を含み、前記中間部分は、前記端部分に対して、連続的な受動キャリア層の反対側に取り付けられる、請求項1乃至4のいずれか一項に記載の装置。
- 非作動状態では、前記作動装置は予め曲げた状態で形成されている、請求項1乃至6のいずれか一項に記載の装置。
- 非作動状態では、前記作動装置は平坦であり、当該装置は、作動時に前記作動装置を所望の方向に屈曲させるための予備成形機構を含む、請求項1乃至6のいずれか一項に記載の装置。
- 前記活性層は、非作動状態では平面である、請求項8に記載の装置。
- 前記活性層は、前記電気活性ポリマーと、前記作動装置を作動させるための1つ又は複数の電極とを含む、請求項1乃至9のいずれか一項に記載の装置。
- 前記1つ又は複数の電極は前記作動装置の一部である、請求項10に記載の装置。
- 前記活性層は、前記光活性ポリマーを含み、当該装置は、前記光活性ポリマーを作動させるために前記光活性ポリマーに作動放射線を供給するための光学装置をさらに有する、請求項1乃至9のいずれか一項に記載の装置。
- 前記光学装置は、前記作動放射線を操作するための、レンズ、ミラー、プリズム、光ワイヤ又は他の光ガイド、偏光素子、放射線フィルタ、放射線スプリッタのうちの1つ又は複数を含む、請求項12に記載の装置。
- 当該装置は、
当該装置が前記作動装置を作動させるための複数の電極を含む場合に、前記複数の電極は、前記作動装置の異なる部分を独立して作動させることができるように分布されており、又は、
当該装置が光学装置を含む場合に、前記作動装置の異なる部分を独立して作動させることができる、ように構成されている、請求項10乃至13のいずれか一項に記載の装置。 - 前記受動キャリア層は、一組の表面チャネルを含む、請求項1乃至14のいずれか一項に記載の装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP15183165.8 | 2015-08-31 | ||
| EP15183165 | 2015-08-31 | ||
| PCT/EP2016/069679 WO2017036815A1 (en) | 2015-08-31 | 2016-08-19 | Actuator or sensor device based on an electroactive or photoactive polymer |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018533335A JP2018533335A (ja) | 2018-11-08 |
| JP6457151B2 true JP6457151B2 (ja) | 2019-01-23 |
Family
ID=54072671
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018510357A Active JP6457151B2 (ja) | 2015-08-31 | 2016-08-19 | 電気活性又は光活性ポリマーに基づくアクチュエータ又はセンサ装置 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US11211544B2 (ja) |
| EP (1) | EP3344872B1 (ja) |
| JP (1) | JP6457151B2 (ja) |
| CN (1) | CN107923371B (ja) |
| BR (1) | BR112018003586A2 (ja) |
| RU (1) | RU2727067C2 (ja) |
| WO (1) | WO2017036815A1 (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11231544B2 (en) | 2015-11-06 | 2022-01-25 | Magic Leap, Inc. | Metasurfaces for redirecting light and methods for fabricating |
| WO2017193012A1 (en) | 2016-05-06 | 2017-11-09 | Magic Leap, Inc. | Metasurfaces with asymetric gratings for redirecting light and methods for fabricating |
| JP6630000B2 (ja) * | 2016-06-20 | 2020-01-15 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 摩擦制御装置および方法 |
| CA3051104A1 (en) | 2017-01-27 | 2018-08-02 | Magic Leap, Inc. | Antireflection coatings for metasurfaces |
| CN109756147B (zh) * | 2018-12-13 | 2020-03-31 | 西安交通大学 | 一种基于液晶弹性聚合物的电致动尺蠖仿生结构及制造工艺 |
| CN109921679B (zh) * | 2019-03-08 | 2020-03-10 | 吉林大学 | 一种具备实时反馈功能的仿生柔性致动器及其制备方法 |
| ES2902432T3 (es) * | 2019-04-02 | 2022-03-28 | Airbus Operations Gmbh | Paneles para la cabina de una aeronave |
| US11411166B2 (en) | 2019-05-17 | 2022-08-09 | International Business Machines Corporation | Conductive particle interconnect switch |
| US11411165B2 (en) | 2019-05-17 | 2022-08-09 | International Business Machines Corporation | Conductive particle interconnect switch |
| CN110919631A (zh) * | 2019-11-19 | 2020-03-27 | 西安理工大学 | 一种基于介电弹性体最小能量结构的刚柔软复合机器人 |
| CN114833831B (zh) * | 2022-05-09 | 2023-06-06 | 西湖大学 | 一种光驱动人工肌肉自持续波动的方法、系统及应用 |
Family Cites Families (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03171784A (ja) | 1989-11-30 | 1991-07-25 | Toshiba Corp | バイモルフ素子 |
| US6781285B1 (en) * | 1994-01-27 | 2004-08-24 | Cymer, Inc. | Packaged strain actuator |
| WO2001006575A1 (en) * | 1999-07-20 | 2001-01-25 | Sri International | Improved electroactive polymers |
| PT1221180E (pt) * | 1999-07-20 | 2010-11-26 | Stanford Res Inst Int | Polímeros electroactivos |
| GB0126372D0 (en) * | 2001-11-02 | 2002-01-02 | 1 Ltd | Curved electro-active actuators |
| US8398693B2 (en) * | 2004-01-23 | 2013-03-19 | Boston Scientific Scimed, Inc. | Electrically actuated medical devices |
| US7575807B1 (en) | 2004-05-28 | 2009-08-18 | Hrl Laboratories, Llc | Hybrid active deformable material structure |
| JP4732876B2 (ja) * | 2005-11-30 | 2011-07-27 | 株式会社日立製作所 | アクチュエータ、アクチュエータモジュールおよびアクチュエータモジュール製造方法 |
| US20070184238A1 (en) * | 2006-02-06 | 2007-08-09 | Energy Related Devices, Inc. | Laminate actuators and valves |
| US20100007245A1 (en) | 2006-02-07 | 2010-01-14 | Edwin Jager | Electroactive Polymer Actuators, Applications and Methods for Fabrication Thereof |
| US7951186B2 (en) * | 2006-04-25 | 2011-05-31 | Boston Scientific Scimed, Inc. | Embedded electroactive polymer structures for use in medical devices |
| JP4858546B2 (ja) | 2006-12-27 | 2012-01-18 | 株式会社村田製作所 | 圧電バルブ |
| JP5123532B2 (ja) | 2007-01-30 | 2013-01-23 | 太陽誘電株式会社 | マイクロカンチレバー |
| JP2009303325A (ja) * | 2008-06-11 | 2009-12-24 | Alps Electric Co Ltd | 高分子アクチュエータ |
| EP2133306A1 (en) * | 2008-06-13 | 2009-12-16 | Stichting Dutch Polymer Institute | Polymer micro-actuators sensitive to one or more inputs |
| US8222799B2 (en) * | 2008-11-05 | 2012-07-17 | Bayer Materialscience Ag | Surface deformation electroactive polymer transducers |
| US7948151B1 (en) * | 2009-04-09 | 2011-05-24 | The United States Of America As Represented By The Secretary Of The Navy | Electroactive polymer-based artificial neuromuscular unit |
| JP2011054615A (ja) | 2009-08-31 | 2011-03-17 | Murata Mfg Co Ltd | アクチュエータ |
| FR2950153B1 (fr) * | 2009-09-15 | 2011-12-23 | Commissariat Energie Atomique | Dispositif optique a membrane deformable a actionnement piezoelectrique |
| JP5959807B2 (ja) | 2010-08-05 | 2016-08-02 | キヤノン株式会社 | アクチュエータおよびアクチュエータ構造体 |
| WO2012032443A1 (en) * | 2010-09-09 | 2012-03-15 | Koninklijke Philips Electronics N.V. | Electroactive polymer actuator |
| IT1402181B1 (it) * | 2010-09-13 | 2013-08-28 | Fond Istituto Italiano Di Tecnologia | Dispositivo microelettromeccanico elettro-attivo e relativo procedimento di rivelazione |
| KR101703281B1 (ko) * | 2010-12-07 | 2017-02-06 | 삼성전자주식회사 | 다층 전기활성 폴리머 디바이스 및 그 제조방법 |
| WO2016193412A1 (en) * | 2015-06-03 | 2016-12-08 | Koninklijke Philips N.V. | Actuation device |
| US10777730B2 (en) * | 2017-12-26 | 2020-09-15 | Santosh Kumar BEHERA | Scalable piezoelectric linear actuator |
| DE102018206665A1 (de) * | 2018-04-30 | 2019-10-31 | Airbus Operations Gmbh | Strukturbauteil sowie System und Verfahren zur Detektion von Beschädigungen |
-
2016
- 2016-08-19 CN CN201680050133.7A patent/CN107923371B/zh active Active
- 2016-08-19 JP JP2018510357A patent/JP6457151B2/ja active Active
- 2016-08-19 WO PCT/EP2016/069679 patent/WO2017036815A1/en active Application Filing
- 2016-08-19 EP EP16758117.2A patent/EP3344872B1/en not_active Not-in-force
- 2016-08-19 BR BR112018003586A patent/BR112018003586A2/pt not_active Application Discontinuation
- 2016-08-19 US US15/752,748 patent/US11211544B2/en active Active
- 2016-08-19 RU RU2018107040A patent/RU2727067C2/ru active
Also Published As
| Publication number | Publication date |
|---|---|
| WO2017036815A1 (en) | 2017-03-09 |
| RU2018107040A3 (ja) | 2019-12-24 |
| JP2018533335A (ja) | 2018-11-08 |
| EP3344872B1 (en) | 2019-06-19 |
| US11211544B2 (en) | 2021-12-28 |
| CN107923371B (zh) | 2020-03-31 |
| EP3344872A1 (en) | 2018-07-11 |
| RU2727067C2 (ru) | 2020-07-17 |
| US20180254404A1 (en) | 2018-09-06 |
| BR112018003586A2 (pt) | 2018-09-25 |
| CN107923371A (zh) | 2018-04-17 |
| RU2018107040A (ru) | 2019-10-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6457151B2 (ja) | 電気活性又は光活性ポリマーに基づくアクチュエータ又はセンサ装置 | |
| CN107431121B (zh) | 基于电活性聚合物的致动器或传感器设备 | |
| JP6464317B2 (ja) | 電気活性または光活性ポリマーをベースにしたアクチュエータデバイス | |
| JP6797835B2 (ja) | 作動装置 | |
| JP7036753B2 (ja) | 形状変形装置 | |
| US10892690B2 (en) | Actuator device and array of the same | |
| US20210336122A1 (en) | Actuator device based on an electroactive material | |
| JP2019521521A (ja) | 摩擦制御装置および方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180828 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20181120 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20181219 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6457151 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |