JP6432057B2 - 上げ越し量修正方法、上げ越し量修正装置、及びプログラム - Google Patents
上げ越し量修正方法、上げ越し量修正装置、及びプログラム Download PDFInfo
- Publication number
- JP6432057B2 JP6432057B2 JP2014123736A JP2014123736A JP6432057B2 JP 6432057 B2 JP6432057 B2 JP 6432057B2 JP 2014123736 A JP2014123736 A JP 2014123736A JP 2014123736 A JP2014123736 A JP 2014123736A JP 6432057 B2 JP6432057 B2 JP 6432057B2
- Authority
- JP
- Japan
- Prior art keywords
- bridge girder
- temperature
- height
- value
- amount
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Landscapes
- Bridges Or Land Bridges (AREA)
Description
き取得した橋桁の温度に対応する橋桁の変形量を求めるようにしてもよい。具体的には、このようにすれば、上床版の温度と下床版の温度との差による橋桁のたわみを除いて、橋桁の真の高さを修正できるようになる。
設計された高さとなるよう、予め変形量を加味して各ブロックの高さを決める。ここで、コンクリートの硬化時の変形やクリープ変形といった施工過程における変形を考慮し、橋桁を、所定の時点までに予想される変形量だけ変形方向とは反対側(例えば鉛直上方)に構築することを上げ越しと呼び、その大きさを上げ越し量と呼ぶ。なお、所定の時点とは、発注者への橋梁の引渡し時点など、目標とする任意の時点をいう。本実施形態では、主として下方に生じる変位を想定して上げ越しと呼ぶが、変位の方向は特に限定されない。ここで、実際の施工過程において、変形は予測通りに生じないこともあり、施工過程において上げ越し量を修正することもある。一方、温度によって橋桁にたわみ(反り)が生じることもあり、上げ越し量の修正は経験に頼らざるを得ない部分があった。
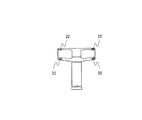
図2は、本実施形態に係るシステムの概要を説明するための図である。図2のシステムは、上げ越し量の修正を適宜行う上げ越し管理装置1と、所定のセンサが設置された構築対象の橋梁2と、工事者が操作するユーザ端末3とを含む。そして、上げ越し管理装置1及びユーザ端末3はネットワーク4を介して接続されている。所定のセンサとして、例えば、位置センサ21、温度センサ22、傾斜センサ23等が橋梁2の所定の位置に設置される。そして、各センサが測定した情報は、例えばユーザ端末3から上げ越し管理装置1に送信され、上げ越し管理装置1は受信した情報を用いて計画された上げ越し量を適宜修正する。また、上げ越し管理装置1が算出した補正値は、例えば工事現場においてユーザ端末3に出力され、以降の工程に反映される。
)やGLANOSS(Global Navigation Satellite System)等の測位システム(GNSS:Global Navigation Satellite System(全地球測位システム)とも呼ぶ)、重力値や気圧等に基づき高度を出力する高度センサ等を用いてもよい。また、位置センサ21の代わりに例えば水準測量等の測量によってユーザが求めた標高をユーザ端末3から入力し、上げ越し管理装置1に送信するようにしてもよい。
図5は、上げ越し管理装置1の一例を示す機能ブロック図である。上げ越し管理装置1は、記憶部101と、位置取得部102と、温度取得部103と、温度影響算出部104と、傾斜取得部105と、傾斜影響算出部106と、真値算出部107と、補正値算出部108と、出力部109とを有する。記憶部101は、コンピュータが有する記憶装置であり、橋梁の設計に基づく各ブロックの桁天端高を示す情報(計画高とも呼ぶ)等を予め保持させておく。また、記憶部101は、センサから取得した情報や、所定の数式に基づいて算出される補正値、その他中間的に生成される値等を保持する。位置取得部102は、ユーザ端末3から、例えば橋桁のうち施工済みブロックの上床版先端の高さを取得する。また、温度取得部103は、例えば橋脚のうち施工済みブロックの所定の位置における温度を取得する。本実施形態では、図3に示した位置に温度センサが設けられ、上床版及び下床版の温度が継続的に取得されるものとする。そして、温度影響算出部104は、取得された温度に基づいて橋桁の変形量を求める。本実施形態では、温度差と橋桁の変形(ゆがみ)量との基準となる対応関係を予め記憶部101に保持しておき、上床版と下床版との温度差から橋桁の変形量を算出する。また、傾斜取得部105は、橋脚の柱頭部における、橋脚の軸方向に対する垂直面と橋桁の上床版とのなす角度(傾斜と呼ぶ)を取得する。なお、上床版は、排水勾配等が設けられているため平面ではない。ここでは、上床版上の横断方向の中心に沿った路線方向の傾きを、上床版の縦断勾配(すなわち、橋桁の縦断勾配)とする。そして、傾斜影響算出部106は、取得された傾斜が施工済みブロックの先端の傾きに及ぼす影響の大きさを算出する。また、真値算出部107は、取得された温度及び傾斜が影響を及ぼす橋桁の変形量を実際に測定されたブロックの高さから除いた高さの真値を算出する。また、補正値算出部108は、設計された橋桁の計画高とブロックの真値との差分を求め、以降のブロックの各々において修正すべき差分の量を反映させた補正値を算出する。そして、出力部109は、補正値を、例えばネットワーク4を介してユーザ端末3へ出力する。
図7は、コンピュータの一例を示す装置構成図である。上げ越し管理装置1及びユーザ端末3は、例えば図7に示すようなコンピュータである。図7に示すコンピュータ1000は、CPU(Central Processing Unit)1001、主記憶装置1002、補助記憶装
置(外部記憶装置)1003、通信IF(Interface)1004、入出力IF(Interface)1005、ドライブ装置1006、通信バス1007を備えている。CPU1001は
、プログラムを実行することにより本実施の形態に係る処理等を行う。主記憶装置1002は、CPU1001が読み出したプログラムやデータをキャッシュしたり、CPUの作業領域を展開したりする。主記憶装置は、具体的には、RAM(Random Access Memory)やROM(Read Only Memory)等である。補助記憶装置1003は、CPU1001により実行されるプログラムや、本実施の形態で用いる設定情報などを記憶する。補助記憶装置1003は、具体的には、HDD(Hard-disk Drive)やSSD(Solid State Drive)、eMMC(embedded Multi-Media Card)、フラッシュメモリ等である。主記憶装置1
002や補助記憶装置1003は、上げ越し管理装置1の記憶部101として働く。通信IF1004は、他のコンピュータとの間でデータを送受信する。上げ越し管理装置1及びユーザ端末3は、通信IF1004を介してネットワーク4に接続される。通信IF1004は、具体的には、有線又は無線のネットワークカード等である。入出力IF1005は、入出力装置と接続され、ユーザから入力を受け付けたり、ユーザへ情報を出力したりする。入出力装置は、具体的には、キーボード、マウス、ディスプレイ、タッチパネル等である。ドライブ装置1006は、磁気ディスク、光磁気ディスク、光ディスク等の記憶媒体に記録されたデータを読み出したり、記憶媒体にデータを書き込んだりする。そして、以上のような構成要素が、通信バス1007で接続されている。なお、これらの構成要素はそれぞれ複数設けられていてもよいし、一部の構成要素(例えば、ドライブ装置1006)を設けないようにしてもよい。また、入出力装置がコンピュータと一体に構成されていてもよい。また、ドライブ装置1006で読み取り可能な可搬性の記憶媒体や、フラッシュメモリのような可搬性の補助記憶装置1003、通信IF1004などを介して、本実施の形態で実行されるプログラムが提供されるようにしてもよい。そして、CPU1001がプログラムを実行することにより、上記のようなコンピュータを例えば図5に示した上げ越し管理装置1として働かせる。
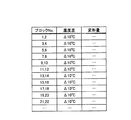
図8は、目標値修正処理の一例を示す処理フロー図である。本実施形態では、各ブロックの構築を行う度に目標値修正処理を行う。なお、上げ越し管理装置1の記憶部101には、構築対象の橋梁の設計値である計画高や、計画高に上げ越し量を加味した目標高がブロックごとに予め記憶されているものとする。なお、目標高は、既存の設計手法にもとづき決定される。例えば、既存のソフトウェア等で目標高を算出し、上げ越し管理装置1の記憶部101に記憶させておく。また、記憶部101には、上床版及び下床版の温度差と橋桁のたわみの大きさとを関連付けたデータや、所定の補正係数等も記憶されているものとする。なお、上床版及び下床版の温度差と橋桁のたわみの大きさは、例えば立体フレームモデルを用いた既存のシミュレーション手法により求めることができる。そして、温度差が例えば10℃の場合の各ブロック先端の降下量を用意しておけば、実際の温度差との比率や所定の補正係数に基づいて、ある時点における橋桁の温度に基づく変形量の推定値を求めることができるようになる。図9は、温度差と橋桁の変形量との対応関係の一例を示す表である。図9の例では、ブロックごとに温度差が10℃の場合の変形量の予測値が保持されている。
の大きさを算出する(S2)。例えば、温度の影響による施工済みブロック先端のたわみの大きさδth,iは、次のような式で求める。

あり且つ上床版と下床版との温度の差ΔTが10℃であるときの橋桁先端のたわみの大きさである。δthcal,iは、予め記憶部101に保持されている。ΔTexp,iは、温度センサ22によって測定された上床版の温度と下床版の温度との差分である。また、αは、所定の補正係数である。αは、例えば次のような式で定義できる。
施工済みブロック先端の上床版の高さである。
3によって測定された角θexp,i,jに橋脚から施工済みブロック先端までの張出長Liを乗じた値である。
正するための補正値δi+1,j+kを算出する(S5)。例えば、補正値δi+1,j+kは、次のような式により求められる。
越し量との差分であり、次の数8により求められる。
本発明は上述の処理を実行するコンピュータプログラムを含む。さらに、当該プログラムを記録した、コンピュータ読み取り可能な記録媒体も、本発明の範疇に属する。当該プログラムが記録された記録媒体については、コンピュータに、この記録媒体のプログラムを読み込ませて実行させることにより、目標値(上げ越し量)の修正処理が可能となる。
4を介して測定値を示す情報を上げ越し管理装置1に送信するようにしてもよい。
101 記憶部
102 位置取得部
103 温度取得部
104 温度影響算出部
105 傾斜取得部
106 傾斜影響算出部
107 真値算出部
108 補正値算出部
109 出力部
2 橋梁
21 位置センサ
22 温度センサ
23 傾斜センサ
3 ユーザ端末
4 ネットワーク
Claims (6)
- 所定数のブロックを橋脚から順に連設する張出架設工法における上げ越し量をコンピュータが修正する上げ越し量修正方法であって、
橋桁の温度を取得し、予め記憶部に保持されている温度による橋桁の変形量の基準値を用いて、橋桁の変形量を求める温度影響算出ステップと、
既設の先端のブロックについて測定した橋桁の高さである実測値から前記温度影響算出ステップにおいて求められた橋桁の変形量を除いた橋桁の真の高さを求める真値算出ステップと、
前記既設の先端のブロックについて設計に基づいて算出された橋桁の高さである目標高と前記橋桁の真の高さとの差分を求め、当該差分を前記先端のブロックから前記所定数のブロックまでの残ブロックの各々に適用すべき補正値を求める補正値算出ステップと、
をコンピュータが実行する上げ越し量修正方法。 - 前記温度による橋桁の変形量の基準値とは、橋桁の上床版の温度及び下床版の温度の差分と橋桁の変形量の予測値とを対応付けた情報であり、
前記温度影響算出ステップにおいて、前記既設の先端のブロックにおける上床版の温度及び下床版の温度の差分と、前記基準値とに基づき取得した前記橋桁の温度に対応する橋桁の変形量を求める
請求項1に記載の上げ越し量修正方法。 - 前記補正値算出ステップにおいて、前記目標高と前記橋桁の真の高さとの差分を残ブロック数で按分することにより、前記補正値を算出する
請求項1又は2に記載の上げ越し量修正方法。 - 鉛直方向に対する前記橋脚の軸方向の傾きを取得し、当該傾きに基づいて前記先端のブロックにおける、前記傾きに起因する高さの変位を求める傾斜影響算出ステップ
をさらに実行し、
前記真値算出ステップにおいて、前記実測値から、前記温度影響算出ステップにおいて求められた橋桁の変形量、及び前記傾斜影響算出ステップにおいて求められた前記高さの変位を除くことにより前記真の高さを求める
請求項1から3のいずれか一項に記載の上げ越し量修正方法。 - 所定数のブロックを橋脚から順に連設する張出架設工法における上げ越し量をコンピュータが修正する上げ越し量修正装置であって、
温度による橋桁の変形量の基準値を保持する記憶部と、
橋桁の温度を取得し、前記記憶部に保持されている前記基準値を用いて、取得した前記橋桁の温度に対応する橋桁の変形量を求める温度影響算出部と、
既設の先端のブロックについて測定した橋桁の高さである実測値から前記温度影響算出部が求めた橋桁の変形量を除いた橋桁の真の高さを求める真値算出部と、
前記既設の先端のブロックについて設計に基づいて算出された橋桁の高さである目標高と前記橋桁の真の高さとの差分を求め、当該差分を前記先端のブロックから前記所定数のブロックまでの残ブロックの各々に適用すべき補正値を求める補正値算出部と、
を有する上げ越し量修正装置。 - 所定数のブロックを橋脚から順に連設する張出架設工法における上げ越し量を修正する処理をコンピュータに実行させるためのプログラムであって、
橋桁の温度を取得し、予め記憶部に保持されている温度による橋桁の変形量の基準値を用いて、取得した前記橋桁の温度に対応する橋桁の変形量を求める温度影響算出ステップと、
既設の先端のブロックについて測定した橋桁の高さである実測値から前記温度影響算出ステップにおいて求められた橋桁の変形量を除いた橋桁の真の高さを求める真値算出ステップと、
前記既設の先端のブロックについて設計に基づいて算出された橋桁の高さである目標高と前記橋桁の真の高さとの差分を求め、当該差分を前記先端のブロックから前記所定数のブロックまでの残ブロックの各々に適用すべき補正値を求める補正値算出ステップと、
を含むプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014123736A JP6432057B2 (ja) | 2014-06-16 | 2014-06-16 | 上げ越し量修正方法、上げ越し量修正装置、及びプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014123736A JP6432057B2 (ja) | 2014-06-16 | 2014-06-16 | 上げ越し量修正方法、上げ越し量修正装置、及びプログラム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016003475A JP2016003475A (ja) | 2016-01-12 |
| JP2016003475A5 JP2016003475A5 (ja) | 2017-07-06 |
| JP6432057B2 true JP6432057B2 (ja) | 2018-12-05 |
Family
ID=55222968
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014123736A Active JP6432057B2 (ja) | 2014-06-16 | 2014-06-16 | 上げ越し量修正方法、上げ越し量修正装置、及びプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6432057B2 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108677739B (zh) * | 2018-07-20 | 2021-04-16 | 长沙理工大学 | 斜拉桥和悬索桥索塔施工过程温度变形修正方法及系统 |
| JP7083129B2 (ja) * | 2018-08-30 | 2022-06-10 | 株式会社大林組 | 設置高さ管理システムおよび設置高さ管理方法 |
| JP7086010B2 (ja) * | 2019-01-25 | 2022-06-17 | 鹿島建設株式会社 | ワーゲン総重量計測方法、張出架設方法、及びワーゲン総重量計測システム |
| CN110184936A (zh) * | 2019-06-10 | 2019-08-30 | 中南大学 | 基于温度监控的大跨度曲线刚构桥变形控制方法及系统 |
| CN114776045B (zh) * | 2022-04-01 | 2023-06-20 | 中铁工程设计咨询集团有限公司 | 一种预制梁的安装方法、装置、设备及可读存储介质 |
| CN115075116A (zh) * | 2022-06-20 | 2022-09-20 | 中铁宝桥集团有限公司 | 无背索斜拉桥空间角度钢塔线型控制方法 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2244870B1 (ja) * | 1973-09-21 | 1978-03-17 | Campenon Bernard Europe | |
| JP4486656B2 (ja) * | 2007-02-27 | 2010-06-23 | 三菱重工業株式会社 | 橋梁の架設方法 |
| JP2009144410A (ja) * | 2007-12-13 | 2009-07-02 | Central Nippon Expressway Co Ltd | Pc橋の閉合方法 |
| JP2011132680A (ja) * | 2009-12-22 | 2011-07-07 | Shimizu Corp | 光ファイバセンサによる構造ヘルスモニタリングシステム |
| JP5649637B2 (ja) * | 2012-11-27 | 2015-01-07 | 三菱重工鉄構エンジニアリング株式会社 | 橋梁の架設装置および橋梁の架設方法 |
-
2014
- 2014-06-16 JP JP2014123736A patent/JP6432057B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2016003475A (ja) | 2016-01-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6432057B2 (ja) | 上げ越し量修正方法、上げ越し量修正装置、及びプログラム | |
| US9417154B2 (en) | Monitoring a response of a bridge based on a position of a vehicle crossing the bridge | |
| Lee et al. | Gage‐free stress estimation of a beam‐like structure based on terrestrial laser scanning | |
| JP5804645B2 (ja) | コンクリート打設支援システム及びプログラム | |
| JP6845434B2 (ja) | 柱状構造物の状態検査方法、装置およびプログラム | |
| JP2013019202A (ja) | コンクリート床版仕上がり高さ管理方法 | |
| CN107289903A (zh) | 直线桥梁悬臂法施工线形连续测量监测系统及监测方法 | |
| CN105113410B (zh) | 支撑胎模及利用支撑胎模搭设公路钢桥的线型成形方法 | |
| CN103674589A (zh) | 一种混凝土结构高大模板支撑体系受力变形实测方法 | |
| JP2016003475A5 (ja) | ||
| JP2012154912A (ja) | 計測システム、計算装置及び構造物 | |
| JP2024060019A (ja) | 測量システム、丁張設置支援方法、丁張設置支援プログラム | |
| JP6472893B2 (ja) | 補修計画立案支援システム、方法およびプログラム | |
| KR101395695B1 (ko) | 구조물 거동 계측 시스템 및 방법 | |
| CN107255467B (zh) | 用于混凝土连续梁桥节段施工的线形自动测量系统及方法 | |
| JP5556018B2 (ja) | 基準墨の位置精度の監視システム、基準墨の位置精度の監視方法 | |
| CN117172032A (zh) | 一种基于隧道上浮的覆土压力分布计算方法及相关设备 | |
| Liang et al. | Performance assessment of self‐anchored suspension footbridge using 3D laser scanning | |
| CN109253716A (zh) | 横梁挠度的非接触式测量装置及方法 | |
| JP7083129B2 (ja) | 設置高さ管理システムおよび設置高さ管理方法 | |
| Azkune et al. | Effect of ambient temperature on the redistribution of loads during construction of multi-storey concrete structures | |
| CN105408901B (zh) | 对限定速度的行驶状态下的轮胎进行建模的方法 | |
| JP7104912B2 (ja) | 情報処理装置および情報処理方法、ならびに、プログラム | |
| CN207050709U (zh) | 直线桥梁悬臂法施工线形连续测量监测系统 | |
| Brault et al. | Assessment of reinforced concrete structures with distributed fibre optic sensors |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170519 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170519 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180313 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180403 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20181009 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20181015 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6432057 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |