JP6361546B2 - 信号処理装置 - Google Patents
信号処理装置 Download PDFInfo
- Publication number
- JP6361546B2 JP6361546B2 JP2015060911A JP2015060911A JP6361546B2 JP 6361546 B2 JP6361546 B2 JP 6361546B2 JP 2015060911 A JP2015060911 A JP 2015060911A JP 2015060911 A JP2015060911 A JP 2015060911A JP 6361546 B2 JP6361546 B2 JP 6361546B2
- Authority
- JP
- Japan
- Prior art keywords
- amplitude
- signal
- array
- azimuth
- detector
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Landscapes
- Variable-Direction Aerials And Aerial Arrays (AREA)
Description
図1は、この発明の実施の形態1に係る信号処理装置の構成を説明する機能ブロック図である。信号処理装置100は、アレイアンテナ1、増幅器2、信号処理器3を備える。アレイアンテナ1は、到来信号の電波を受信してアナログ信号を生成する装置である。アレイアンテナ1は、決められた配列パターンで1次元または2次元のアレイに配列された決められた数のアンテナ素子3を有する。増幅器2は、アンテナ素子と同数に設けられており、アレイアンテナの各アンテナ素子3が受信したアナログ信号を増幅する。信号処理器3は、増幅器2が増幅した信号から到来する電波を検出する。
A(θAZ, θEL)=(1, exp(jφ), exp(j2φ), , exp(j(M−1)φ)) (1)
ここに、
φ=2π*(fL/c)*sin(θEL)*cos(θAZ) (2)
[A]=(A(θAZ[1],θEL[1]), A(θAZ[2],θEL[2]), ,A(θAZ[N],θEL[N]))
=(A[1], A[2], ,A[N]) (3)
X=[A]F+W (4)
ベクトルXを複素共役転置したベクトルをXHと表記する。また、配列[X]を複素共役転置した配列を[XH]と表記する。
[S]=XXH=[A]FFH[AH]+WWH (5)
さらに、自己相関行列[S]を固有値展開して、振幅方位配列Fを求める。
(方法1)振幅方位配列に格納された振幅値の絶対値の分布を要約する平均値などの代表値に基づく方法。
(方法2)隣接するどの方位よりも振幅絶対値が大きい極大値(ピーク)近傍の急峻さの度合いを利用する方法。
(方法3)方法1と方法2を組合せた方法。
D=max(F[jp+1]-F[jp+2],F[jp]-F[jp+1],F[jp]-F[jp-1],F[jp-1]-F[jp-2]) (6)
式(6)は、ピークをとる方位の2個離れた方位までの範囲を近傍範囲とし、近傍範囲の中での隣接する方位で求めた傾きの最大値を急峻度とする場合の式である。
D=max(F[jp+2]-F[jp+3],F[jp+1]-F[jp+2],F[jp]-F[jp+1],F[jp]-F[jp-1],
F[jp-1]-F[jp-2],F[jp-2]-F[jp-3],
(k/2)*max(F[jp+1]-F[jp+3],F[jp]-F[jp+2],
F[jp-1]-F[jp-3],F[jp]-F[jp-2]) (7)
ここに、2個離れた方位間の振幅絶対値の傾き、例えば(F[jp+1]-F[jp+3])/2は、その間にある2つの隣接する方位間の振幅絶対値の傾き(F[jp+1]-F[jp+2]とF[jp+2]-F[jp+3])の中のどちらか大きい方(max(F[jp+1]-F[jp+2],F[jp+2]-F[jp+3]))よりも大きくなることがないので、2個離れた傾きからも急峻度Dを決められるように、等価換算係数kは、k>1とする。3個以上に離れた方位との間での傾きを使用する場合には、ピークをとる方位の差が大きくなるほど、等価換算係数kを大きくする。
Dmax>Q0 到来方位を決定可
Dmax≦Q0 到来方位を決定不可
なお、Dmax=Q0の場合に、到来方位を決定可と判断してもよい。
図3および図4では方位を1次元としているが、高度角も区別して方位を2次元で表現する場合でも、同様である。
図5は、この発明の実施の形態2に係る信号処理装置の構成を説明する機能ブロック図である。信号処理装置100Aは、信号処理器3AがMUSIC処理器8の替わりにスパース処理器11を有する点が、実施の形態1の場合と異なる。スパース処理器11は、MUSIC処理器8と同様に、振幅アンテナ配列から方位スペクトラムを求める。MUSIC処理器8と比較して、スパース処理器11は、処理に時間をより多く要するが判定精度がよい。スパース処理器11が、実施の形態2での方位検出器である。
図6は、この発明の実施の形態3に係る信号処理装置の構成を説明する機能ブロック図である。信号処理装置100Bは、信号処理器3Bが方位検出方式切替器12およびスパース処理器11を備える点が、実施の形態1の場合と異なる。スパース処理器11が、振幅方位配列を算出する第2方位検出器である。方位検出方式切替器12が、スパース処理器11により振幅方位配列を算出するかどうかを決める起動判定器である。
方位検出方式切替器12がスパース処理器11を起動不要と判断する場合は、MUSIC処理器8が算出した方位スペクトラムから信号検出器9が信号の有無を判断する。
スパース処理器11を起動要と判断する場合は、スパース処理器11による方位スペクトラム算出処理が起動される。そして、スパース処理器11が算出した方位スペクトラムから信号検出器9が信号の有無を判断する。
Dmax>Q1 スパース処理器11を起動不要
Q1≧Dmax≧Q2 スパース処理器11を起動要
Q2>Dmax スパース処理器11を起動不要
なお、Q2を使用しないで、Q1≧Dmaxである場合は、スパース処理器11を起動するようにしてもよい。
信号有無の判断方法がこの実施の形態で示した以外の方法の場合でも、同様な効果が得られる。
1 アンテナアレイ
2 増幅器
3、3A、3B 信号処理器
4 アンテナ素子
5 A/D変換器(連続離散変換器)
6 FFT処理器(高速フーリエ変換器)
7 アンテナパターン記憶部
8 MUSIC処理器(方位検出器)
9 信号検出器
10 帯域幅検出器
11 スパース処理器(方位検出器、第2方位検出器)
12 方位検出方式切替器(起動判定器)
51 各アンテナ素子が受信する低SN比の信号
52 信号が存在する周波数範囲
53 信号
54 ノイズ
55 方位検出器が出力する振幅方位配列
56 信号が存在する周波数帯域
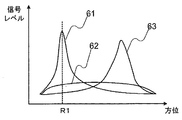
61 ある周波数f1の信号
62 ノイズ
63 方位検出器が出力する方位スペクトラム
Claims (7)
- アレイ状に配列されて到来電波を受信する複数のアンテナ素子を有するアレイアンテナと、
前記アンテナ素子が受信した電波から生成したアナログ信号をデジタル信号に変換する前記アンテナ素子ごとに設けられた複数の連続離散変換器と、
前記アンテナ素子ごとの決められた期間の前記デジタル信号を高速フーリエ変換して前記アンテナ素子ごとかつ離散周波数ごとの複素振幅値を生成する高速フーリエ変換器と、
前記アレイアンテナの離散周波数ごとの、決められた分解能の方位から到来した電波を前記アンテナ素子のそれぞれが受信する位相を表現する複素数をまとめたアンテナパターンを記憶するアンテナパターン記憶部と、
前記離散周波数ごとに、前記高速フーリエ変換器が生成したそれぞれの前記アンテナ素子ごとの複素振幅値をまとめた配列である振幅アンテナ配列が入力されて、前記アンテナパターンに基づき、決められた分解能の方位ごとの振幅値の配列である振幅方位配列を算出する方位検出器と、
前記離散周波数ごとに、前記振幅方位配列に基づいて信号の到来方位の決定可否を判断する信号検出器と、
前記信号検出器が信号の到来方位が決定可と判断した前記離散周波数を信号ありの周波数帯域と判断する帯域幅検出器とを備えた信号処理装置。 - 前記信号検出器は、隣接するどの方位よりも振幅値の絶対値が大きい極大値であり、かつ、前記極大値の急峻度が急峻度閾値を越える振幅値が前記振幅方位配列に格納されている場合に信号の到来方位が決定可と判断することを特徴とする請求項1に記載の信号処理装置。
- 前記信号検出器は、前記振幅方位配列に格納された振幅値の絶対値の分布を要約する代表値である振幅代表値に基づいて決められた振幅閾値を越える絶対値を有する振幅値が前記振幅方位配列に格納されている場合に信号の到来方位が決定可と判断することを特徴とする請求項1に記載の信号処理装置。
- 前記信号検出器は、前記振幅方位配列に格納された振幅値の絶対値の分布を要約する代表値である振幅代表値に基づいて決められた振幅閾値を越える絶対値を有し、かつ、隣接するどの方位よりも振幅値の絶対値が大きい極大値であり、かつ、前記極大値の急峻度が急峻度閾値を越える振幅値が前記振幅方位配列に格納されている場合に信号の到来方位が決定可と判断することを特徴とする請求項1に記載の信号処理装置。
- 前記方位検出器は、前記アンテナパターンに基づくMUSIC信号処理により、前記振幅アンテナ配列から前記振幅方位配列を算出することを特徴とする請求項1から請求項4までの何れか1項に記載の信号処理装置。
- 前記方位検出器は、前記アンテナパターンに基づくスパース信号分解により、前記振幅アンテナ配列から前記振幅方位配列を算出することを特徴とする請求項1から請求項4までの何れか1項に記載の信号処理装置。
- 前記振幅アンテナ配列が入力されて、前記アンテナパターンに基づくスパース信号分解により、前記振幅方位配列を算出する第2方位検出器と、
前記方位検出器で算出された前記振幅方位配列を検査して、前記第2方位検出器により前記振幅方位配列を算出するかどうかを決める起動判定器とを備え、
前記信号検出器が、前記第2方位検出器が起動された場合は前記第2方位検出器が算出した前記振幅方位配列から、前記第2方位検出器が起動されない場合は前記方位検出器が算出した前記振幅方位配列から、信号の到来方位の決定可否を判断することを特徴とする請求項5に記載の信号処理装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015060911A JP6361546B2 (ja) | 2015-03-24 | 2015-03-24 | 信号処理装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015060911A JP6361546B2 (ja) | 2015-03-24 | 2015-03-24 | 信号処理装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016180678A JP2016180678A (ja) | 2016-10-13 |
| JP2016180678A5 JP2016180678A5 (ja) | 2017-09-14 |
| JP6361546B2 true JP6361546B2 (ja) | 2018-07-25 |
Family
ID=57131794
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015060911A Expired - Fee Related JP6361546B2 (ja) | 2015-03-24 | 2015-03-24 | 信号処理装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6361546B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6697357B2 (ja) | 2016-09-15 | 2020-05-20 | 株式会社日立製作所 | ソフトウェア更新システム |
| JP7136599B2 (ja) * | 2018-06-19 | 2022-09-13 | 日本無線株式会社 | 到来方向測定装置及び到来方向測定プログラム |
| KR102531553B1 (ko) * | 2021-09-15 | 2023-05-15 | 덕산넵코어스 주식회사 | 다중 prn 기반 배열안테나를 이용한 항기만 빔포밍 장치 및 방법 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2648110B2 (ja) * | 1994-11-30 | 1997-08-27 | 防衛庁技術研究本部長 | 信号検出方法及び装置 |
| JP2930044B2 (ja) * | 1997-01-31 | 1999-08-03 | 日本電気株式会社 | 電波到来方位測定装置 |
| JP3969315B2 (ja) * | 2003-01-30 | 2007-09-05 | 三菱電機株式会社 | 方位探知装置 |
| JP4484736B2 (ja) * | 2005-03-17 | 2010-06-16 | 三菱電機株式会社 | 方位探知受信装置、目標探知システム及び信号処理方法 |
| JP4784976B2 (ja) * | 2005-09-02 | 2011-10-05 | Kddi株式会社 | 電波到来方向推定装置、電波到来方向推定プログラム、および記録媒体 |
| JP5646372B2 (ja) * | 2011-03-10 | 2014-12-24 | 株式会社東芝 | 受信装置及び信号判定プログラム |
| JP2014157110A (ja) * | 2013-02-18 | 2014-08-28 | Mitsubishi Electric Corp | 信号処理装置、レーダ装置および信号処理方法 |
-
2015
- 2015-03-24 JP JP2015060911A patent/JP6361546B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2016180678A (ja) | 2016-10-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5695925B2 (ja) | 電子走査型レーダ装置、受信波方向推定方法及び受信波方向推定プログラム | |
| US9660772B2 (en) | Detecting and processing weak signals using an array of antennas | |
| IL266212B2 (en) | Direction of arrival estimation | |
| JP6361546B2 (ja) | 信号処理装置 | |
| JP2017036990A (ja) | 到来方向推定装置 | |
| KR101071202B1 (ko) | 광대역 신호의 방향 탐지 장치 및 방법 | |
| KR101909710B1 (ko) | 소나 시스템에서 신호의 희소성을 기초로 주파수영역에서의 공분산행렬 기반 압축센싱 도래각 추정방법 및 시스템 | |
| CA2948539C (en) | Calibration device | |
| Kebeli | Extended symmetrical aperture direction finding using correlative interferometer method | |
| RU2491569C2 (ru) | Способ пеленгования с повышенной разрешающей способностью | |
| JP2004198189A (ja) | 方位探知装置 | |
| KR20170128899A (ko) | 무선 통신 신호의 수신 시각 산출 장치 및 방법 | |
| Biswas et al. | New high resolution direction of arrival estimation using Compressive Sensing | |
| JP2005172760A (ja) | 方位探知装置 | |
| JP6200082B2 (ja) | 電波監視装置 | |
| KR20190143264A (ko) | 2차원 방향탐지 장치 및 방법 | |
| JP4488177B2 (ja) | 測角方法及び装置 | |
| JP2011203229A (ja) | 到来角推定装置 | |
| Zayyani et al. | Non-coherent direction of arrival estimation via frequency estimation | |
| JP2012215444A (ja) | 方位測定装置、該方位測定装置に用いられる方位測定方法及び方位測定プログラム | |
| JP5511479B2 (ja) | 測定装置 | |
| RU2518007C1 (ru) | Способ пеленгации ионосферных сигналов | |
| JP2011022079A (ja) | 測角装置 | |
| JP6331841B2 (ja) | 到来方向推定装置 | |
| Hsu et al. | DOA Estimation with Triply Primed Arrays Based on Fourth-Order Statistics |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170804 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170804 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180517 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180529 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180611 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6361546 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |