JP6327353B2 - Mems共振器用の駆動回路 - Google Patents
Mems共振器用の駆動回路 Download PDFInfo
- Publication number
- JP6327353B2 JP6327353B2 JP2016551241A JP2016551241A JP6327353B2 JP 6327353 B2 JP6327353 B2 JP 6327353B2 JP 2016551241 A JP2016551241 A JP 2016551241A JP 2016551241 A JP2016551241 A JP 2016551241A JP 6327353 B2 JP6327353 B2 JP 6327353B2
- Authority
- JP
- Japan
- Prior art keywords
- frequency
- signal
- pass filter
- drive
- circuit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000000630 rising effect Effects 0.000 claims description 110
- 239000003990 capacitor Substances 0.000 claims description 59
- 238000005259 measurement Methods 0.000 claims description 27
- 230000010363 phase shift Effects 0.000 claims description 26
- 238000000034 method Methods 0.000 claims description 23
- 230000003247 decreasing effect Effects 0.000 claims description 4
- 238000005070 sampling Methods 0.000 description 52
- 238000001514 detection method Methods 0.000 description 37
- 230000001360 synchronised effect Effects 0.000 description 20
- 230000006870 function Effects 0.000 description 18
- 230000008859 change Effects 0.000 description 15
- 230000000694 effects Effects 0.000 description 10
- 230000008569 process Effects 0.000 description 9
- 238000013016 damping Methods 0.000 description 8
- 238000013461 design Methods 0.000 description 7
- 230000010355 oscillation Effects 0.000 description 7
- 230000035945 sensitivity Effects 0.000 description 7
- 239000013643 reference control Substances 0.000 description 6
- 230000004044 response Effects 0.000 description 6
- 230000005284 excitation Effects 0.000 description 5
- 238000001914 filtration Methods 0.000 description 5
- 230000003071 parasitic effect Effects 0.000 description 5
- 238000012546 transfer Methods 0.000 description 5
- 238000012937 correction Methods 0.000 description 4
- 238000006073 displacement reaction Methods 0.000 description 4
- 239000011159 matrix material Substances 0.000 description 4
- 239000002131 composite material Substances 0.000 description 3
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 description 3
- 238000012545 processing Methods 0.000 description 3
- 238000004088 simulation Methods 0.000 description 3
- 230000003321 amplification Effects 0.000 description 2
- 230000002238 attenuated effect Effects 0.000 description 2
- 230000006399 behavior Effects 0.000 description 2
- 230000009286 beneficial effect Effects 0.000 description 2
- 230000008901 benefit Effects 0.000 description 2
- 238000004364 calculation method Methods 0.000 description 2
- 230000008878 coupling Effects 0.000 description 2
- 238000010168 coupling process Methods 0.000 description 2
- 238000005859 coupling reaction Methods 0.000 description 2
- 238000006880 cross-coupling reaction Methods 0.000 description 2
- 238000003199 nucleic acid amplification method Methods 0.000 description 2
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 230000004913 activation Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000001427 coherent effect Effects 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000005288 electromagnetic effect Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 238000007689 inspection Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000010606 normalization Methods 0.000 description 1
- 230000007420 reactivation Effects 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 229920006395 saturated elastomer Polymers 0.000 description 1
- 230000035939 shock Effects 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 230000006641 stabilisation Effects 0.000 description 1
- 238000011105 stabilization Methods 0.000 description 1
- 230000000087 stabilizing effect Effects 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 230000001052 transient effect Effects 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
- 230000001960 triggered effect Effects 0.000 description 1
Images







Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/5705—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using masses driven in reciprocating rotary motion about an axis
- G01C19/5712—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using masses driven in reciprocating rotary motion about an axis the devices involving a micromechanical structure
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03H—IMPEDANCE NETWORKS, e.g. RESONANT CIRCUITS; RESONATORS
- H03H9/00—Networks comprising electromechanical or electro-acoustic devices; Electromechanical resonators
- H03H9/02—Details
- H03H9/02244—Details of microelectro-mechanical resonators
- H03H9/02259—Driving or detection means
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/5776—Signal processing not specific to any of the devices covered by groups G01C19/5607 - G01C19/5719
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03B—GENERATION OF OSCILLATIONS, DIRECTLY OR BY FREQUENCY-CHANGING, BY CIRCUITS EMPLOYING ACTIVE ELEMENTS WHICH OPERATE IN A NON-SWITCHING MANNER; GENERATION OF NOISE BY SUCH CIRCUITS
- H03B5/00—Generation of oscillations using amplifier with regenerative feedback from output to input
- H03B5/02—Details
- H03B5/06—Modifications of generator to ensure starting of oscillations
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03B—GENERATION OF OSCILLATIONS, DIRECTLY OR BY FREQUENCY-CHANGING, BY CIRCUITS EMPLOYING ACTIVE ELEMENTS WHICH OPERATE IN A NON-SWITCHING MANNER; GENERATION OF NOISE BY SUCH CIRCUITS
- H03B5/00—Generation of oscillations using amplifier with regenerative feedback from output to input
- H03B5/30—Generation of oscillations using amplifier with regenerative feedback from output to input with frequency-determining element being electromechanical resonator
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03H—IMPEDANCE NETWORKS, e.g. RESONANT CIRCUITS; RESONATORS
- H03H7/00—Multiple-port networks comprising only passive electrical elements as network components
- H03H7/002—Gyrators
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03H—IMPEDANCE NETWORKS, e.g. RESONANT CIRCUITS; RESONATORS
- H03H9/00—Networks comprising electromechanical or electro-acoustic devices; Electromechanical resonators
- H03H9/02—Details
- H03H9/125—Driving means, e.g. electrodes, coils
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03J—TUNING RESONANT CIRCUITS; SELECTING RESONANT CIRCUITS
- H03J1/00—Details of adjusting, driving, indicating, or mechanical control arrangements for resonant circuits in general
- H03J1/06—Driving or adjusting arrangements; combined with other driving or adjusting arrangements, e.g. of gain control
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03L—AUTOMATIC CONTROL, STARTING, SYNCHRONISATION OR STABILISATION OF GENERATORS OF ELECTRONIC OSCILLATIONS OR PULSES
- H03L7/00—Automatic control of frequency or phase; Synchronisation
- H03L7/06—Automatic control of frequency or phase; Synchronisation using a reference signal applied to a frequency- or phase-locked loop
- H03L7/08—Details of the phase-locked loop
- H03L7/0805—Details of the phase-locked loop the loop being adapted to provide an additional control signal for use outside the loop
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03L—AUTOMATIC CONTROL, STARTING, SYNCHRONISATION OR STABILISATION OF GENERATORS OF ELECTRONIC OSCILLATIONS OR PULSES
- H03L7/00—Automatic control of frequency or phase; Synchronisation
- H03L7/06—Automatic control of frequency or phase; Synchronisation using a reference signal applied to a frequency- or phase-locked loop
- H03L7/08—Details of the phase-locked loop
- H03L7/099—Details of the phase-locked loop concerning mainly the controlled oscillator of the loop
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03H—IMPEDANCE NETWORKS, e.g. RESONANT CIRCUITS; RESONATORS
- H03H7/00—Multiple-port networks comprising only passive electrical elements as network components
- H03H2007/006—MEMS
- H03H2007/008—MEMS the MEMS being trimmable
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03H—IMPEDANCE NETWORKS, e.g. RESONANT CIRCUITS; RESONATORS
- H03H7/00—Multiple-port networks comprising only passive electrical elements as network components
- H03H7/01—Frequency selective two-port networks
- H03H7/0153—Electrical filters; Controlling thereof
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Signal Processing (AREA)
- Acoustics & Sound (AREA)
- Gyroscopes (AREA)
- Oscillators With Electromechanical Resonators (AREA)
- Micromachines (AREA)
- Amplifiers (AREA)
- Inductance-Capacitance Distribution Constants And Capacitance-Resistance Oscillators (AREA)
Description
本発明は、微小電気機械システムに関し、具体的には、MEMS共振器を駆動するための閉ループ駆動回路に関する。
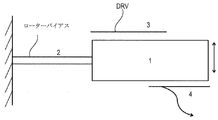
例えば、振動型(vibratory)MEMSジャイロスコープ内の一次(駆動)共振器として、安定したローノイズ共振器が必要である。コリオリ力は、駆動された共振器の速度に直接的に比例するため、その運動の精度はきわめて重要である。理想的なケースでは、共振器を実現する駆動ループは、駆動共振器の速度を一定に保たなければならない。環境変動は、常に、MEMSの特性の変化をもたらすため、一定の速度を近似せざるを得ない。MEMS共振器は、それを共振周波数駆動力(resonant frequency drive force)で励起することにより、少なくとも一つの共振周波数または共振モードで振動するように形成することができる任意の小さいサイズの素子である。
本発明の目的は、安定したローノイズ振動を実現し、および一定の振動状態が確実に短時間で実現される、MEMS共振器を駆動するための閉ループ駆動回路を提供することである。本発明の目的は、独立項の特徴部によって実現される。
以下、本発明を、添付図面を参照して、好適な実施形態に関して詳細に説明する。
以下の実施形態は例示的なものである。明細書は、「ある」、「一つの」または「いくつかの」実施形態を指す可能性があるが、これは、必ずしもそのような各言及が同じ実施形態に対するものであるか、または、その特徴が単一の実施形態にのみ当てはまることを意味するわけではない。異なる実施形態の単一の特徴は、さらなる実施形態を提供するために組合せてもよい。
振幅制御は、PLLが、HPFからの基準クロック信号を受取ることができる場合に、振幅制御回路(24)が、システムを正しい動作点に安定させる機能を起動するように、有利には連続的である。この出願に記載されている立上り方法は、ここに記載されているようなDCバイアスレベルを制御するための他の方法を用いる振幅制御とともに用いてもよいことに気付くべきである。また、駆動信号は、非正弦波、例えば、方形波であってもよい。位相シフト手段は、振幅制御実施態様に依存しない。
立上り回路は、本願明細書においては、迅速で確実な立上りおよびショック後の復元を可能にする要素の組み合わせを指す。立上り状態は、一般に、立上り状態または簡潔に立上りと呼ぶことができる立上り段階と呼ばれる、複数の段階を有するプロセスと見なすことができる。立上り回路は、立上り状態を検出するように適応される。立上り状態を検出するということは、MEMS共振器(21)が、通常の動作状態であると定義されているものよりも小さい振幅で動作していることが検出されていること、または、MEMS共振器が、全くおよび/またはMEMS共振器公称周波数で動作していないこと、および駆動ループ(22)が、通常のMEMS共振器(21)の動作を持続するために、MEMS共振器(21)から十分なレベルの入力信号を受取っていないことを意味する。検出された立上り状態に応答して、立上り回路は、特異的な方法で、MEMS共振器へのDCバイアス電圧の供給を構成するように適応される。また、立上り回路(25)は、駆動ループ(22)の振幅レベルに依存して、異なるクロック信号の生成、および生成されたクロック信号の供給を制御することができる。
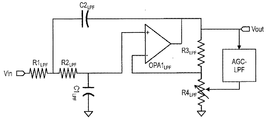
共振器の位置情報を電子信号として検出して、増幅した信号を共振器に送り返す駆動ループは、正帰還(ポジティブフィードバック)を実行して、そのループを共振周波数で振動させるために、その信号を位相シフトする必要がある。
H(s)=1/(s2/ω0 2+s/Qω0+1),
ここで、ω0=2πf0は、固有振動数であり、Q=1/(2ξ)は、フィルターの品質係数である。Qが、低く、例えば1になるように設定され、およびω0がジャイロスコープの共振周波数、すなわち、MEMS共振器の共振周波数に合うように設定される場合、そのフィルターは、MEMS共振器の機械的周波数に等しい周波数で、ω0における必要な90度の位相シフトを生じさせる。ローパスフィルターが、位相シフトに用いられる場合、その位相シフトは、負に、すなわち、−90度になる。この場合に、低周波利得と呼ばれる帯域外利得は、1/Qだけ高い。
Claims (18)
- MEMS共振器のための駆動回路であって、当該駆動回路は、
前記MEMS共振器を安定した振動へと駆動するための、ポジティブフィードバックを行うよう構成された閉駆動ループを有し、
前記閉駆動ループは:
前記MEMS共振器の信号を検出して増幅するよう構成された電荷感知増幅器と、
前記の検出され増幅された信号を90度位相シフトするための手段と、
前記の検出され増幅されかつ位相シフトされた信号を、フィードバック信号として前記MEMS共振器へフィードバックするための手段と
を有し、
当該駆動回路の特徴は、
前記の検出され増幅された信号を位相シフトするための前記手段が、少なくとも2次のローパスフィルターであって、かつ、
前記ローパスフィルターの90度の位相シフトのターゲット周波数が、その周波数において該ローパスフィルターが、必要な90度の位相シフトを生じさせる周波数であって、該ターゲット周波数が、前記MEMS共振器の機械的共振周波数に等しい、
前記駆動回路。 - 前記ローパスフィルターが、連続時間ローパスフィルターアーキテクチャを有し、および/または、
前記ローパスフィルターのターゲット固有振動数が、前記MEMS共振器の機械的共振周波数にマッチしている、
請求項1に記載の駆動回路。 - 前記ローパスフィルターのコーナー周波数が、前記ローパスフィルターと同じ集積回路上に配置された発振器手段を備える同調手段によって同調されるように適合しており、かつ、
前記同調手段が、前記発振器手段の同調パラメータを調整することにより、前記発振器手段を、所定の周波数に同調させるように適合しており、かつ、
その後、前記発振器手段の前記同調パラメータは、前記ローパスフィルターの前記同調パラメータを決定するのに用いられるように適合している、
請求項1から2のいずれかに記載の駆動回路。 - 前記ローパスフィルターのコーナー周波数が、発振器手段を有する同調手段によって同調されるように適合しており、かつ、
前記ローパスフィルター自体が、前記同調パラメータを決定する発振器手段として作動するように構成されるように適合している、
請求項1または2に記載の駆動回路。 - 前記発振器手段として作動する前記ローパスフィルターが、さらに、前記MEMS共振器の共振器周波数の測定のために、前記MEMS共振器を励起するのに用いられるように適合している、請求項4に記載の駆動回路。
- 前記発振器手段は、前記ローパスフィルターから離間され、発振器手段は、前記発振器内のRC発振器抵抗および/またはキャパシタンス値を同調させることによって同調され、前記発振器手段の所定の同調周波数に対応する、前記同調された抵抗および/または同調されたキャパシタンス値は、その後、前記ローパスフィルターの抵抗および/またはキャパシタンス値を決めて、前記ローパスフィルターのコーナー周波数を同調するのに用いられる、請求項3に記載の駆動回路。
- ローパスフィルターのコーナー周波数f0に対して、同調パラメータに対応する前記発振器手段のターゲット周波数は、構成要素値の選択、または、前記フィルターおよび前記発振器手段のRC回路および回路トポロジーによって定義される比によって、f0と比較して増減される、請求項6に記載の駆動回路。
- 前記発振器およびローパスフィルターは、スイッチトキャパシター同調手段を備え、前記キャパシタンス値または前記同調手段のクロック信号は、同調パラメータとして用いられるように適合している、請求項3に記載の駆動回路。
- ローパスフィルターのコーナー周波数f0に対して、前記同調手段周波数は、nが一定であるかまたは所定の値である場合に、n*f0となるように選択され、それに応じて、前記ローパスフィルターの対応するクロック周波数および/またはキャパシタンス値が増減される、請求項3に記載の駆動回路。
- 前記同調手段が、並列接続された構成要素とスイッチング手段とから成るバンクを備える、請求項3〜請求項9のいずれか1項に記載の駆動回路。
- 前記発振器手段の周波数を測定するための基準クロック周波数が、前記駆動ループが駆動する共振器の周波数から導出される、請求項3〜請求項10のいずれか1項に記載の駆動回路。
- 前記MEMS共振器の振動振幅が、前記閉駆動ループ手段によって供給されたAC駆動信号で合計されたDCバイアス電圧レベルを調整することによって制御される、請求項1〜請求項11のいずれか1項に記載の駆動回路。
- 前記検出されて増幅された信号の振幅を検出するためのクロック信号が、次の2者のうちの一方において形成され、該2者が、
−前記駆動ループからの前記信号レベルが、PLLを備えるクロック回路内で、安定したクロック信号を生成するのに十分に高いレベルである場合に、前記PLLを備えるクロック生成回路、および、
−クロック信号が、前記PLLを備えるクロック生成回路から利用可能でない場合に、前記ローパスフィルターの出力を用いて生成されたクロックシフト立上り信号、
である、請求項1〜請求項12のいずれか1項に記載の駆動回路。 - 前記駆動回路は、入力信号の整流された出力サンプルを両クロック位相で生成するためのスイッチトキャパシター誘導器回路をさらに備え、前記スイッチトキャパシター誘導器回路は、出力ゼロ化スイッチを備えた2つのフィードバックスイッチトキャパシターから成る少なくとも一つのセットを備え、前記スイッチトキャパシター誘導器回路は、前記駆動ループから受取ったスイッチトキャパシター誘導器回路の入力信号と同じ周波数を有するクロック信号を受取るように構成され、前記2つのフィードバックスイッチトキャパシターから成る少なくとも一つのセットの前記出力ゼロ化スイッチは、2つの相対的に逆のクロック位相によって作動するように構成される、請求項1〜請求項13のいずれか1項に記載の駆動回路。
- 請求項1〜請求項14のいずれか1項に記載の前記駆動回路を含む、MEMS発振器。
- 請求項1〜請求項14のいずれか1項に記載の前記駆動回路を含む、MEMSジャイロスコープ。
- ポジティブフィードバックを行うよう構成された閉駆動ループを用いて、MEMS共振器を安定した振動へと駆動するための方法であって、当該方法は、
電荷感知増幅器によって、前記MEMS共振器の信号を、検出して増幅すること、
前記検出されて増幅された信号を、90度位相シフトすること、および、
前記検出されて増幅されかつ位相シフトされた信号を、フィードバック信号として前記MEMS共振器にフィードバックすること、
を有し、
当該方法の特徴は、
前記検出されて増幅された信号を位相シフトすることが、少なくとも2次のローパスフィルターを用いて達成されることであって、かつ、
前記ローパスフィルターの90度の位相シフトのターゲット周波数が、その周波数において該ローパスフィルターが、必要な90度の位相シフトを生じさせる周波数であって、該ターゲット周波数が、前記MEMS共振器の機械的共振周波数に等しい、
前記方法。 - 前記検出されて増幅された信号を位相シフトすることが、連続時間ローパスフィルターアーキテクチャを有する前記ローパスフィルターを用いて達成され、および/または、
前記ローパスフィルターのターゲット固有振動数が、前記MEMS共振器の機械的共振周波数にマッチしている、
請求項17に記載の方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FI20145137 | 2014-02-12 | ||
| FI20145137A FI126019B (en) | 2014-02-12 | 2014-02-12 | Drive circuit for a MEMS resonator |
| PCT/IB2015/050903 WO2015121780A2 (en) | 2014-02-12 | 2015-02-06 | A drive circuitry for a MEMS resonator |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017512402A JP2017512402A (ja) | 2017-05-18 |
| JP6327353B2 true JP6327353B2 (ja) | 2018-05-23 |
Family
ID=52629640
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016551241A Active JP6327353B2 (ja) | 2014-02-12 | 2015-02-06 | Mems共振器用の駆動回路 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US9644961B2 (ja) |
| EP (1) | EP3105853B1 (ja) |
| JP (1) | JP6327353B2 (ja) |
| FI (1) | FI126019B (ja) |
| TW (1) | TWI637592B (ja) |
| WO (1) | WO2015121780A2 (ja) |
Families Citing this family (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9784967B2 (en) * | 2015-10-12 | 2017-10-10 | Intel Corporation | Suppression of undesired harmonics in MEMS mirror projector display |
| US10585178B2 (en) * | 2015-10-21 | 2020-03-10 | Semiconductor Componenents Industries, Llc | Piezo transducer controller and method having adaptively-tuned linear damping |
| US9859791B2 (en) * | 2015-11-19 | 2018-01-02 | Dsp Group Ltd. | High efficiency high voltage charge pump actuator for capacitive load |
| US9817048B2 (en) * | 2015-12-09 | 2017-11-14 | Omnivision Technologies, Inc. | Image sensor power supply noise detection |
| EP3485561B8 (en) | 2016-07-15 | 2021-12-08 | Analog Devices International Unlimited Company | Driving charge pump circuits |
| US10673416B2 (en) * | 2016-08-08 | 2020-06-02 | Analog Devices, Inc. | Suppression of electromagnetic interference in sensor signals |
| US10749472B2 (en) * | 2017-02-11 | 2020-08-18 | Mumec, Inc. | Frequency-converting super-regenerative transceiver |
| US10914583B2 (en) | 2018-02-20 | 2021-02-09 | Analog Devices, Inc. | Sense amplifiers for gyroscopes and related systems and methods |
| JP6801684B2 (ja) * | 2018-03-29 | 2020-12-16 | 株式会社デンソー | 振動型ジャイロスコープ |
| KR102593635B1 (ko) * | 2018-04-11 | 2023-10-26 | 한국전자통신연구원 | 공진기 기반 센서 및 그의 감지 방법 |
| JP6903610B2 (ja) * | 2018-08-27 | 2021-07-14 | 株式会社東芝 | 共振器およびそれを含む装置 |
| US10680621B1 (en) * | 2019-02-28 | 2020-06-09 | Keysight Technologies, Inc. | Phase stabilization for a frequency multiplier |
| CN109945849B (zh) * | 2019-04-02 | 2023-09-26 | 四川知微传感技术有限公司 | 一种基于mems陀螺仪的闭环锁相驱动电路结构 |
| US11175138B2 (en) | 2019-06-26 | 2021-11-16 | Stmicroelectronics, Inc. | MEMS gyroscope control circuit |
| US11162790B2 (en) * | 2019-06-26 | 2021-11-02 | Stmicroelectronics, Inc. | MEMS gyroscope start-up process and circuit |
| US11255670B2 (en) | 2019-06-26 | 2022-02-22 | Stmicroelectronics, Inc. | MEMS gyroscope self-test using a technique for deflection of the sensing mobile mass |
| US11320452B2 (en) | 2019-06-26 | 2022-05-03 | Stmicroelectronics, Inc. | MEMS accelerometer self-test using an active mobile mass deflection technique |
| EP3985352B1 (en) * | 2020-10-16 | 2023-12-27 | Atlantic Inertial Systems Limited | Gyroscope |
| IT202100016880A1 (it) | 2021-06-28 | 2022-12-28 | St Microelectronics Srl | Giroscopio microelettromeccanico con anello risonante di pilotaggio ad ampiezza di oscillazione controllata e metodo per controllare un giroscopio microelettromeccanico |
| CN114199221B (zh) * | 2021-11-29 | 2023-04-14 | 北京时代民芯科技有限公司 | 一种频率可调的mems陀螺仪自激启动电路 |
| DE102022213104A1 (de) | 2022-12-06 | 2024-06-06 | Robert Bosch Gesellschaft mit beschränkter Haftung | Mikromechanisches Sensorsystem mit einem Drehratensensor und Verfahren zum Betrieb eines mikromechanischen Sensorsystems mit einem Drehratensensor |
| FR3147000A1 (fr) * | 2023-03-24 | 2024-09-27 | Stmicroelectronics International N.V. | Circuit de mesure d'une dérivée |
| DE102023107892A1 (de) | 2023-03-28 | 2024-10-02 | Endress+Hauser SE+Co. KG | Anordnung zur Temperaturkompensation einer Komponente eines Bauteils |
| DE102023107891A1 (de) | 2023-03-28 | 2024-10-02 | Endress+Hauser SE+Co. KG | Anordnung zur Temperaturkompensation einer ersten Komponente eines ersten Bauteils |
| CN116576889B (zh) * | 2023-07-13 | 2023-09-29 | 湖南天羿领航科技有限公司 | 一种环形谐振陀螺敏感结构筛选装置及其应用方法 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AU674322B2 (en) * | 1992-06-02 | 1996-12-19 | Telefonaktiebolaget Lm Ericsson (Publ) | Clock extraction circuit for fiber optical receivers |
| US5327302A (en) * | 1992-09-16 | 1994-07-05 | At&T Bell Laboratories | Data filter tuning for constant density recording applications |
| US7352249B2 (en) * | 2003-10-03 | 2008-04-01 | Analog Devices, Inc. | Phase-locked loop bandwidth calibration circuit and method thereof |
| US20110050214A1 (en) * | 2006-05-10 | 2011-03-03 | The University Of Manitoba | System and method for measuring magnetic field strength using a mechanical resonator |
| US7941723B1 (en) | 2007-09-26 | 2011-05-10 | Integrated Device Technology, Inc. | Clock generator and method for providing reliable clock signal using array of MEMS resonators |
| EP2282404A1 (en) | 2009-08-03 | 2011-02-09 | Nxp B.V. | Frequency selection and amplifying device |
| EP2336717B1 (en) | 2009-12-21 | 2012-09-19 | STMicroelectronics Srl | Microelectromechanical device having an oscillating mass, and method for controlling a microelectromechanical device having an oscillating mass |
| US8539834B2 (en) * | 2010-02-15 | 2013-09-24 | Stmicroelectronics S.R.L. | Microelectromechanical gyroscope with calibrated synchronization of actuation and method for actuating a microelectromechanical gyroscope |
| JP5975601B2 (ja) * | 2011-02-25 | 2016-08-23 | セイコーエプソン株式会社 | 検出回路、物理量検出装置、角速度検出装置、集積回路装置及び電子機器 |
| US8427249B1 (en) * | 2011-10-19 | 2013-04-23 | The United States Of America As Represented By The Secretary Of The Navy | Resonator with reduced acceleration sensitivity and phase noise using time domain switch |
| CN103250347A (zh) | 2011-12-09 | 2013-08-14 | 旭化成微电子株式会社 | 振荡器和ic 芯片 |
| US8836444B2 (en) * | 2012-03-23 | 2014-09-16 | Uchicago Argonne, Llc | Frequency stabilization in nonlinear MEMS and NEMS oscillators |
| US8912856B2 (en) * | 2013-01-08 | 2014-12-16 | Maxim Integrated Products, Inc. | Electro-mechanical resonance loop |
| US9118334B2 (en) * | 2013-03-15 | 2015-08-25 | Freescale Semiconductor, Inc. | System and method for improved MEMS oscillator startup |
| FI125611B (en) * | 2014-02-12 | 2015-12-15 | Murata Manufacturing Co | Drive circuit for starting a MEMS resonator |
-
2014
- 2014-02-12 FI FI20145137A patent/FI126019B/en active IP Right Grant
-
2015
- 2015-02-05 TW TW104103859A patent/TWI637592B/zh active
- 2015-02-06 EP EP15708336.1A patent/EP3105853B1/en active Active
- 2015-02-06 JP JP2016551241A patent/JP6327353B2/ja active Active
- 2015-02-06 WO PCT/IB2015/050903 patent/WO2015121780A2/en active Application Filing
- 2015-02-10 US US14/618,006 patent/US9644961B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US9644961B2 (en) | 2017-05-09 |
| US20150226556A1 (en) | 2015-08-13 |
| TW201535970A (zh) | 2015-09-16 |
| WO2015121780A2 (en) | 2015-08-20 |
| WO2015121780A8 (en) | 2016-03-17 |
| EP3105853A2 (en) | 2016-12-21 |
| JP2017512402A (ja) | 2017-05-18 |
| EP3105853B1 (en) | 2018-07-18 |
| FI20145137A (fi) | 2015-08-13 |
| WO2015121780A3 (en) | 2015-11-26 |
| FI126019B (en) | 2016-05-31 |
| TWI637592B (zh) | 2018-10-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6327353B2 (ja) | Mems共振器用の駆動回路 | |
| US9829317B2 (en) | Drive circuit for MEMS resonator startup | |
| JP6785795B2 (ja) | ジャイロスコープの位相に基づく測定及び制御 | |
| US7961060B1 (en) | Amplitude regulated resonant oscillator with sampled feedback | |
| JP2019515304A (ja) | 力フィードバック機能を備えた二次センスループ | |
| Aaltonen et al. | An analog drive loop for a capacitive MEMS gyroscope | |
| US8508104B2 (en) | Piezoelectric actuator driver circuit | |
| TWI636235B (zh) | 用於微機電系統類型之共振裝置的電子驅動電路及其致動方法 | |
| US8884711B2 (en) | MEMS device oscillator loop with amplitude control | |
| CN102564411A (zh) | 振动型陀螺传感器和振动型陀螺电路 | |
| JP2018151200A (ja) | 振動型角速度センサ | |
| US9252707B2 (en) | MEMS mass bias to track changes in bias conditions and reduce effects of flicker noise | |
| JP2012013529A (ja) | 発振装置および角速度検出装置 | |
| JP6805188B2 (ja) | 検出器 | |
| CN104539257A (zh) | 带通滤波电路及其控制方法、以及mems陀螺仪驱动电路 | |
| He et al. | Closed loop driving and detect circuit of piezoelectric solid-state micro gyroscope | |
| Aaltonen | Integrated interface electronics for capacitive MEMS inertial sensors | |
| EP4113060B1 (en) | Driving circuit for controlling a mems oscillator of resonant type | |
| JP2007292660A (ja) | 角速度センサ | |
| JP6191071B2 (ja) | 周波数制御回路、発振回路および発振器 | |
| JP2009049711A (ja) | 微小な振幅の交流電流信号を大きな振幅の電圧信号に変換する回路装置 | |
| WO2024057606A1 (en) | Mechanical resonator-based oscillators and related methods for generation of a phase used to compensate for temperature-dependent frequency errors | |
| JP2003102183A (ja) | 圧電素子制御装置 | |
| JP2008157767A (ja) | 加速度検出装置 | |
| CN117767883A (zh) | 微机电系统振荡器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171107 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180109 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180320 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180402 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6327353 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |