JP6298362B2 - 撮像装置及びその制御方法、及び撮像システム - Google Patents
撮像装置及びその制御方法、及び撮像システム Download PDFInfo
- Publication number
- JP6298362B2 JP6298362B2 JP2014114371A JP2014114371A JP6298362B2 JP 6298362 B2 JP6298362 B2 JP 6298362B2 JP 2014114371 A JP2014114371 A JP 2014114371A JP 2014114371 A JP2014114371 A JP 2014114371A JP 6298362 B2 JP6298362 B2 JP 6298362B2
- Authority
- JP
- Japan
- Prior art keywords
- focus detection
- imaging
- correction
- information
- evaluation value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000003384 imaging method Methods 0.000 title claims description 118
- 238000000034 method Methods 0.000 title claims description 76
- 238000001514 detection method Methods 0.000 claims description 265
- 238000012937 correction Methods 0.000 claims description 189
- 238000011156 evaluation Methods 0.000 claims description 112
- 230000003287 optical effect Effects 0.000 claims description 77
- 230000008569 process Effects 0.000 claims description 35
- 238000006243 chemical reaction Methods 0.000 claims description 34
- 210000001747 pupil Anatomy 0.000 claims description 26
- 238000004364 calculation method Methods 0.000 claims description 24
- 230000008859 change Effects 0.000 description 22
- 238000012545 processing Methods 0.000 description 21
- 238000010586 diagram Methods 0.000 description 11
- 230000010354 integration Effects 0.000 description 10
- 230000004075 alteration Effects 0.000 description 8
- 230000006870 function Effects 0.000 description 8
- 238000001454 recorded image Methods 0.000 description 6
- 238000004891 communication Methods 0.000 description 5
- 230000007423 decrease Effects 0.000 description 4
- 230000004907 flux Effects 0.000 description 4
- 239000003086 colorant Substances 0.000 description 3
- 230000001276 controlling effect Effects 0.000 description 2
- 230000011514 reflex Effects 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 230000035945 sensitivity Effects 0.000 description 2
- 201000009310 astigmatism Diseases 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 238000012790 confirmation Methods 0.000 description 1
- 238000013500 data storage Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000000605 extraction Methods 0.000 description 1
- 238000007429 general method Methods 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
Images










Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/67—Focus control based on electronic image sensor signals
- H04N23/672—Focus control based on electronic image sensor signals based on the phase difference signals
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N1/00—Scanning, transmission or reproduction of documents or the like, e.g. facsimile transmission; Details thereof
- H04N1/21—Intermediate information storage
- H04N1/2104—Intermediate information storage for one or a few pictures
- H04N1/2112—Intermediate information storage for one or a few pictures using still video cameras
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/67—Focus control based on electronic image sensor signals
- H04N23/673—Focus control based on electronic image sensor signals based on contrast or high frequency components of image signals, e.g. hill climbing method
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/70—SSIS architectures; Circuits associated therewith
- H04N25/703—SSIS architectures incorporating pixels for producing signals other than image signals
- H04N25/704—Pixels specially adapted for focusing, e.g. phase difference pixel sets
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Studio Devices (AREA)
- Automatic Focus Adjustment (AREA)
- Focusing (AREA)
Description
第1の実施形態では、本発明をレンズ交換可能な一眼レフタイプのデジタルカメラに適用した例について説明する。
図1は、第1の実施形態におけるデジタルカメラの概略構成を示すブロック図である。上述したように、第1の実施形態におけるデジタルカメラは交換レンズ式一眼レフカメラであり、レンズユニット100とカメラ本体120とを有する。レンズユニット100は図中央の点線で示されるマウントMを介して、カメラ本体120と接続される。
次に、撮像素子122の信号を用いた、デジタルカメラにおける焦点検出の詳細について説明する。第1の実施形態の焦点検出では撮像面位相差AFとTVAFを採用している。まず、それぞれのAF方式について説明する。
最初に、図2から図4を用いて、撮像面位相差AFについて説明する。図2は第1の実施形態における撮像素子122の画素配列を模式的に示した図で、2次元CMOSエリアセンサの縦(Y方向)6行と横(X方向)8列の範囲を、レンズユニット100側から観察した状態を示している。カラーフィルタにはベイヤー配列が適用され、奇数行の画素211には、左から順に緑(Green)と赤(Red)のカラーフィルタが交互に設けられる。また、偶数行の画素211には、左から順に青(Blue)と緑(Green)のカラーフィルタが交互に設けられる。また、オンチップマイクロレンズ211iがカラーフィルタの上に構成されている。オンチップマイクロレンズ211iの内側に配置された複数の矩形は、それぞれ光電変換部211a、211bである。
次に、TVAFのための各種AF用評価値の算出の流れについて説明する。図5は、TVAF焦点検出部130の構成を主に示すブロック図である。
図6は、撮影範囲内における焦点検出領域を示す図で、この焦点検出領域内で撮像素子122から得られた信号に基づいて撮像面位相差AF及びTVAFが行われる。図6において、点線で示す長方形は撮像素子122の撮影範囲217を示す。撮影範囲217内には撮像面位相差AFを行う3つの横方向の焦点検出領域218ah、218bh、218chが形成されている。第1の実施形態では、撮像面位相差AF用の焦点検出領域を撮影範囲217の中央部と左右2箇所の計3箇所を備える構成とした。また、3つの撮像面位相差AF用の焦点検出領域218ah、218bh、218chのそれぞれを包含する形で、TVAFを行う焦点検出領域219a、219b、219cが形成されている。TVAFを行う焦点検出領域では図5の水平方向と垂直方向の焦点評価値を用いて、コントラスト検出を行う。
次に、図7を参照して、上記構成を有するデジタルカメラにおける本第1の実施形態における焦点検出(AF)処理について説明する。なお、第1の実施形態におけるAF処理の概要は次の通りである。まず、焦点検出領域218ah、218bh、218chそれぞれについて、位相差AFにより焦点ずれ量(デフォーカス量)と信頼性とを求める。そして、所定の信頼性を有するデフォーカス量が得られた領域と、得られなかった領域に区分する。全ての焦点検出領域218ah、218bh、218chにおいて所定の信頼性を有するデフォーカス量が得られていれば、最至近の被写体に合焦するようにフォーカスレンズ104を駆動する。
DEF_A=DEF_B+BP …(1)
次に、S23に進み、レンズ駆動に用いたデフォーカス量が算出された焦点検出領域に関して、表示器126に合焦表示を行い、AF処理を終了する。
次に、図8及び図9を用いて、図7のS20で行うBP補正値の算出方法について説明する。図8は、図7のS20で行う処理の詳細を示すBP補正値を算出する流れを示したサブルーチンである。
ケース(1)第1の読み出しモードで撮像面位相差検出式の焦点検出
ケース(2)第2の読み出しモードで撮像面位相差検出式の焦点検出
ケース(3)第1の読み出しモードでコントラスト方式の焦点検出
ケース(4)第2の読み出しモードでコントラスト方式の焦点検出
BP2=C0+C1x2+C2y2+C3x4+C4x2y2+C5y4 …(2)
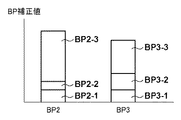
次に、ケース(1)、(3)、(4)の場合のBP補正値BP1、BP3、BP4の算出方法を説明する。これらのBP補正値は、ケース(2)の場合に比べて、補正すべきBP補正量が小さいため、式(2)で求まるBP2の値を用いて、簡易的に算出する。補正値算出の際には、対応するケース(1)、(3)、(4)それぞれについて、上述した6つの変数の内、2つの変数S、Fに応じて、2つのオフセット成分と1つのゲイン成分を選択する。そして、選択したオフセット成分O1(S,F)、O2(S,F)、O3(S,F)、O4(S,F)、O5(S,F)、O6(S,F)とゲイン成分G1(S,F)、G2(S,F)、G3(S,F)を用いて調整を行う。これらのオフセット成分やゲイン成分は、カメラMPU125内に記憶されているか、もしくは、レンズメモリ118に記憶されており、通信によりカメラMPU125は情報を取得する。
BP1=(BP2−O1)×G1+O2 …(3)
BP3=(BP2−O3)×G2+O4 …(4)
BP4=(BP2−O5)×G3+O6 …(5)
上述の通り、BP補正量の発生要因は、空間周波数BPと色BPと縦横BPが主たる要因である。撮影光学系が同じ場合、焦点検出信号に用いられる色が同じであれば、焦点検出方法や撮像素子122の読み出しモードが異なっても、色BPや縦横BPの発生量は変わらない。そのため、この2つの要因による誤差を主に調整するために、オフセット成分を用いている。一方で、空間周波数BPは、焦点検出信号の評価する空間周波数帯域によって発生量が変化するため、撮像素子122の読み出しモードの変更によって値が変わる。撮像素子122の読み出しモードの違いにより画素ピッチが大きくなったり、焦点検出信号に処理されているバンドパスフィルターの評価帯域が低くなったりするほど、空間周波数BP量は大きくなる。そのため、BP補正値BP2に含まれる空間周波数BP量をゲイン成分として絶対値が1以下の値を乗じることによって値を小さくし、BP補正値BP1、BP3、BP4を算出する。
次に、図10を参照して、本発明の第2の実施形態について説明する。第1の実施形態との主な違いは、複数の種類のカメラ本体によって、焦点検出方式や撮像素子の読み出しモードなどが異なる点である。第1の実施形態では、1種類のカメラ本体内に、複数の焦点検出方式や撮像素子の読み出しモードが存在し、各々に対応したBP補正値を用いて焦点検出結果の補正を行った。第2の実施形態では、焦点検出方式や撮像素子の読み出しモードなどが異なるカメラ間でも、BP補正を行うことを可能にする。
Claims (22)
- 撮像素子から出力された信号に基づいて、複数の異なる焦点検出方法のいずれかを用いて、撮影光学系を合焦状態に制御するための評価値を検出する焦点検出手段と、
前記評価値を、検出に用いられた焦点検出方法に応じて補正する補正手段と、
前記複数の異なる焦点検出方法のうち、予め決められた焦点検出方法を用いて検出された評価値を補正するための基準補正値を算出するための情報と、前記予め決められた焦点検出方法を除く焦点検出方法を用いて検出された評価値を補正するための補正値を、前記基準補正値から算出するための情報とを記憶した記憶手段とを有し、
前記補正手段は、前記記憶手段に記憶された情報を用いて、前記評価値を補正するための補正値を算出して、前記補正を行うことを特徴とする撮像装置。 - 前記基準補正値を算出するための情報は、前記撮像素子の特性及び撮影時の前記撮影光学系の状態に応じて、前記複数の焦点検出方法の間で互いに異なる情報であって、前記補正値を算出するための情報は、撮影時の前記撮影光学系の状態に応じて、前記複数の焦点検出方法の間で互いに異なる情報であることを特徴とする請求項1に記載の撮像装置。
- 前記予め決められた焦点検出方法は、前記評価値に基づいて制御された前記撮影光学系の位置と、前記撮像素子から出力された信号により構成された画像が合焦している場合の前記撮影光学系の位置との差が最も生じやすい焦点検出方法であることを特徴とする請求項2に記載の撮像装置。
- 前記補正手段は、更に、焦点検出を行う焦点検出領域の像高に基づいて、前記基準補正値を算出することを特徴とする請求項1乃至3のいずれか1項に記載の撮像装置。
- 前記撮像素子の特性は、前記撮像素子に設定された瞳距離と、前記撮像素子の画素サイズの少なくともいずれかを含むことを特徴とする請求項2または3に記載の撮像装置。
- 前記撮影光学系の状態は、焦点調節状態、絞り値、射出瞳距離の少なくともいずれかを含むことを特徴とする請求項2、3、5のいずれか1項に記載の撮像装置。
- 前記撮像素子は、1つのマイクロレンズに対して複数の光電変換部を有し、位相差検出用の信号を出力する複数の画素を備え、
前記焦点検出手段に用いられる複数の焦点検出方法は、前記位相差検出用の信号に基づいて行われる位相差方式の焦点検出方法を含むことを特徴とする請求項1乃至6のいずれか1項に記載の撮像装置。 - 前記焦点検出手段に用いられる前記複数の焦点検出方法は、前記撮像素子から得られる信号のコントラストに基づいて行われるコントラスト方式の焦点検出方法を含むことを特徴とする請求項1乃至7のいずれか1項に記載の撮像装置。
- 異なる解像度で読み出し可能な撮像素子と、
前記撮像素子から出力された信号に基づいて、複数の異なる焦点検出方法のいずれかを用いて、撮影光学系を合焦状態に制御するための評価値を検出する焦点検出手段と、
前記評価値を、撮影時の解像度及び検出に用いられた焦点検出方法の組み合わせに応じて補正する補正手段と、
前記異なる解像度及び前記複数の異なる焦点検出方法の複数の組み合わせのうち、予め決められた組み合わせで検出された評価値を補正するための基準補正値を算出するための情報と、前記予め決められた組み合わせを除く組み合わせで検出された評価値を補正するための補正値を、前記基準補正値から算出するための情報とを記憶した記憶手段とを有し、
前記補正手段は、前記記憶手段に記憶された情報を用いて、前記評価値を補正するための補正値を算出して、前記補正を行うことを特徴とする撮像装置。 - 前記基準補正値を算出するための情報は、前記撮像素子の特性及び撮影時の前記撮影光学系の状態に応じて、前記複数の組み合わせの間で互いに異なる情報であって、前記補正値を算出するための情報は、撮影時の前記撮影光学系の状態に応じて、前記複数の組み合わせの間で互いに異なる情報であることを特徴とする請求項9に記載の撮像装置。
- 前記予め決められた組み合わせは、前記評価値に基づいて制御された前記撮影光学系の位置と、前記撮像素子から出力された信号により構成された画像が合焦状態にある場合の前記撮影光学系の位置との差が最も生じやすい組み合わせであることを特徴とする請求項10に記載の撮像装置。
- 前記補正手段は、更に、焦点検出を行う焦点検出領域の像高に基づいて、前記基準補正値を算出することを特徴とする請求項9乃至11のいずれか1項に記載の撮像装置。
- 前記撮像素子の特性は、前記撮像素子に設定された瞳距離と、前記撮像素子の画素サイズの少なくともいずれかを含むことを特徴とする請求項10または11に記載の撮像装置。
- 前記撮影光学系の状態は、焦点調節状態、絞り値、射出瞳距離の少なくともいずれかを含むことを特徴とする請求項10、11、13のいずれか1項に記載の撮像装置。
- 前記撮像素子は、1つのマイクロレンズに対して複数の光電変換部を有し、位相差検出用の信号を出力する複数の画素を備え、
前記焦点検出手段に用いられる複数の焦点検出方法は、前記位相差検出用の信号に基づいて行われる位相差方式の焦点検出方法を含むことを特徴とする請求項9乃至14のいずれか1項に記載の撮像装置。 - 前記焦点検出手段に用いられる前記複数の焦点検出方法は、前記撮像素子から得られる信号のコントラストに基づいて行われるコントラスト方式の焦点検出方法を含むことを特徴とする請求項9乃至15のいずれか1項に記載の撮像装置。
- 撮影光学系と撮像装置とを含む撮像システムにおいて、
前記撮像装置が、
撮像素子から出力された信号に基づいて、撮影光学系を合焦状態に制御するための評価値を検出する焦点検出手段と、
前記評価値を、検出に用いられた焦点検出方法に応じて補正する補正手段とを有し、
前記撮影光学系が、
複数の異なる焦点検出方法のうち、予め決められた焦点検出方法を用いて検出された評価値を補正するための基準補正値を算出するための情報と、前記予め決められた焦点検出方法を除く焦点検出方法を用いて検出された評価値を補正するための補正値を、前記基準補正値から算出するための情報とを記憶した記憶手段とを有し、
前記撮影光学系は、前記記憶手段に記憶された情報のうち、前記焦点検出手段が検出に用いた焦点検出方法に応じた情報を前記撮像装置に出力し、
前記補正手段は、前記撮影光学系から出力された情報を用いて、前記評価値を補正するための補正値を算出して、前記補正を行うことを特徴とする撮像システム。 - 撮影光学系と撮像装置とを含む撮像システムにおいて、
前記撮像装置が、
異なる解像度で読み出し可能な撮像素子と、
前記撮像素子から出力された信号に基づいて、撮影光学系を合焦状態に制御するための評価値を検出する焦点検出手段と、
前記評価値を、撮影時の解像度及び検出に用いられた焦点検出方法に応じて補正する補正手段とを有し、
前記撮影光学系が、
複数の異なる解像度と複数の異なる焦点検出方法の複数の組み合わせのうち、予め決められた組み合わせで検出された評価値を補正するための基準補正値を算出するための情報と、前記予め決められた組み合わせを除く組み合わせで検出された評価値を補正するための補正値を、前記基準補正値から算出するための情報とを記憶した記憶手段とを有し、
前記撮影光学系は、前記記憶手段に記憶された情報のうち、前記撮像装置で用いられた組み合わせに応じた情報を前記撮像装置に出力し、
前記補正手段は、前記撮影光学系から出力された情報を用いて、前記評価値を補正するための補正値を算出して、前記補正を行うことを特徴とする撮像システム。 - 焦点検出手段が、撮像素子から出力された信号に基づいて、複数の異なる焦点検出方法のいずれかを用いて、撮影光学系を合焦状態に制御するための評価値を検出する焦点検出工程と、
前記複数の異なる焦点検出方法のうち、予め決められた焦点検出方法を用いて検出された評価値を補正するための基準補正値を算出するための情報と、前記予め決められた焦点検出方法を除く焦点検出方法を用いて検出された評価値を補正するための補正値を、前記基準補正値から算出するための情報とを記憶した記憶手段から、取得手段が、前記焦点検出工程で用いられた焦点検出方法に応じた情報を取得する取得工程と、
補正手段が、前記取得工程で取得した情報を用いて、前記評価値を補正するための補正値を算出する算出工程と、
前記補正手段が、前記検出された評価値を、前記算出された補正値を用いて補正する補正工程と
を有することを特徴とする撮像装置の制御方法。 - 前記取得工程では、前記撮影光学系に設けられた前記記憶手段から、前記情報を取得することを特徴とする請求項19に記載の撮像装置の制御方法。
- 焦点検出手段が、異なる解像度で読み出し可能な撮像素子から出力された信号に基づいて、複数の異なる焦点検出方法のいずれかを用いて、撮影光学系を合焦状態に制御するための評価値を検出する焦点検出工程と、
前記異なる解像度及び前記複数の異なる焦点検出方法の複数の組み合わせのうち、予め決められた組み合わせで検出された評価値を補正するための基準補正値を算出するための情報と、前記予め決められた組み合わせを除く組み合わせで検出された評価値を補正するための補正値を、前記基準補正値から算出するための情報とを記憶した記憶手段から、取得手段が、前記焦点検出工程で用いられた組み合わせに応じた情報を取得する取得工程と、
補正手段が、前記取得工程で取得した情報を用いて、前記評価値を補正するための補正値を算出する算出工程と、
前記補正手段が、前記検出された評価値を、前記算出された補正値を用いて補正する補正工程と
を有することを特徴とする撮像装置の制御方法。 - 前記取得工程では、前記撮影光学系に設けられた前記記憶手段から、前記情報を取得することを特徴とする請求項21に記載の撮像装置の制御方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014114371A JP6298362B2 (ja) | 2014-06-02 | 2014-06-02 | 撮像装置及びその制御方法、及び撮像システム |
| US14/722,446 US9407813B2 (en) | 2014-06-02 | 2015-05-27 | Image capturing apparatus, control method of image capturing apparatus, and image capturing system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014114371A JP6298362B2 (ja) | 2014-06-02 | 2014-06-02 | 撮像装置及びその制御方法、及び撮像システム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2015227995A JP2015227995A (ja) | 2015-12-17 |
| JP2015227995A5 JP2015227995A5 (ja) | 2017-07-13 |
| JP6298362B2 true JP6298362B2 (ja) | 2018-03-20 |
Family
ID=54703274
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014114371A Active JP6298362B2 (ja) | 2014-06-02 | 2014-06-02 | 撮像装置及びその制御方法、及び撮像システム |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US9407813B2 (ja) |
| JP (1) | JP6298362B2 (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6478457B2 (ja) * | 2014-01-23 | 2019-03-06 | キヤノン株式会社 | 焦点調節装置及び焦点調節方法 |
| TWI554098B (zh) * | 2014-10-07 | 2016-10-11 | 緯創資通股份有限公司 | 錄影裝置與錄影方法 |
| JP6600162B2 (ja) * | 2015-05-19 | 2019-10-30 | キヤノン株式会社 | 撮像装置およびその制御方法 |
| JP6474693B2 (ja) * | 2015-06-19 | 2019-02-27 | オリンパス株式会社 | 焦点検出装置、焦点検出方法、および記録媒体 |
| JP6504969B2 (ja) * | 2015-08-19 | 2019-04-24 | キヤノン株式会社 | 撮像システム、撮像装置、レンズ装置、撮像システムの制御方法 |
| JP6628678B2 (ja) * | 2016-04-21 | 2020-01-15 | キヤノン株式会社 | 距離測定装置、撮像装置、および距離測定方法 |
| JP6987524B2 (ja) * | 2017-04-24 | 2022-01-05 | キヤノン株式会社 | 制御装置、撮像装置、制御方法、プログラム、および、記憶媒体 |
| JP2019035825A (ja) * | 2017-08-10 | 2019-03-07 | キヤノン株式会社 | 撮像装置 |
| KR20230050011A (ko) * | 2021-10-07 | 2023-04-14 | 에스케이하이닉스 주식회사 | 카메라 테스트 장치, 및 카메라의 포커싱 특성을 테스트 하는 방법 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003295047A (ja) * | 2002-04-05 | 2003-10-15 | Canon Inc | 撮像装置および撮像システム |
| JP5087077B2 (ja) * | 2007-08-29 | 2012-11-28 | パナソニック株式会社 | オートフォーカス機能を有する交換レンズカメラシステム |
| JP5153542B2 (ja) | 2008-09-25 | 2013-02-27 | キヤノン株式会社 | 自動焦点調節装置および焦点調節方法 |
| JP5237059B2 (ja) | 2008-11-14 | 2013-07-17 | キヤノン株式会社 | 焦点検出装置及び方法、及び撮像装置 |
| JP5653035B2 (ja) * | 2009-12-22 | 2015-01-14 | キヤノン株式会社 | 撮像装置、焦点検出方法、および制御方法 |
| KR101579737B1 (ko) * | 2010-01-05 | 2015-12-23 | 삼성전자주식회사 | 자동초점 조절 장치 및 카메라 시스템 |
| JP2013008018A (ja) * | 2011-05-25 | 2013-01-10 | Canon Inc | 撮像装置およびその制御方法 |
| JP5896763B2 (ja) * | 2012-02-02 | 2016-03-30 | キヤノン株式会社 | 光学機器および自動焦点調節を行う方法 |
| JP5914055B2 (ja) * | 2012-03-06 | 2016-05-11 | キヤノン株式会社 | 撮像装置 |
| JP6239857B2 (ja) * | 2013-05-13 | 2017-11-29 | キヤノン株式会社 | 撮像装置およびその制御方法 |
| JP6194642B2 (ja) * | 2013-05-31 | 2017-09-13 | 株式会社ニコン | 交換レンズ |
| JP6313685B2 (ja) * | 2014-05-01 | 2018-04-18 | キヤノン株式会社 | 撮像装置およびその制御方法 |
-
2014
- 2014-06-02 JP JP2014114371A patent/JP6298362B2/ja active Active
-
2015
- 2015-05-27 US US14/722,446 patent/US9407813B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US9407813B2 (en) | 2016-08-02 |
| JP2015227995A (ja) | 2015-12-17 |
| US20150350527A1 (en) | 2015-12-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10212334B2 (en) | Focusing adjustment apparatus and focusing adjustment method | |
| JP6298362B2 (ja) | 撮像装置及びその制御方法、及び撮像システム | |
| JP6429546B2 (ja) | 撮像装置、制御方法、プログラム、および、記憶媒体 | |
| US9641769B2 (en) | Image capture apparatus and method for controlling the same | |
| JP6682310B2 (ja) | 焦点検出装置および方法、および撮像装置 | |
| US20170318217A1 (en) | Image capturing apparatus and method for controlling image capturing apparatus | |
| JP6843604B2 (ja) | 情報処理装置及び情報処理方法 | |
| JP6415140B2 (ja) | 撮像装置及びその制御方法 | |
| JP2014153509A (ja) | 撮像装置及び撮像方法 | |
| JP6849325B2 (ja) | 制御装置、撮像装置、制御方法、プログラム、および、記憶媒体 | |
| JP6854619B2 (ja) | 焦点検出装置及び方法、撮像装置、レンズユニット及び撮像システム | |
| JP6890937B2 (ja) | 焦点検出装置、撮像装置、および焦点検出方法 | |
| US20200092489A1 (en) | Optical apparatus, control method, and non-transitory computer-readable storage medium | |
| JP2017223760A (ja) | 撮像装置及び焦点調節方法 | |
| JP6744933B2 (ja) | レンズ部およびその制御方法 | |
| JP6685769B2 (ja) | 情報処理装置、撮像装置及び情報処理方法 | |
| JP6686191B2 (ja) | 焦点検出装置、撮像装置、及び焦点検出方法 | |
| JP6686239B1 (ja) | レンズ部、送信装置、及び受信装置 | |
| JP6415054B2 (ja) | 撮像装置及び撮像方法 | |
| JP6548626B2 (ja) | 撮像装置、撮像装置の制御方法およびフォーカス制御プログラム | |
| JP2020003686A (ja) | 焦点検出装置、撮像装置および交換レンズ装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170531 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170531 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20171227 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180126 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180223 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6298362 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |