JP6291033B2 - 介助ロボットおよび物体搬送装置 - Google Patents
介助ロボットおよび物体搬送装置 Download PDFInfo
- Publication number
- JP6291033B2 JP6291033B2 JP2016509848A JP2016509848A JP6291033B2 JP 6291033 B2 JP6291033 B2 JP 6291033B2 JP 2016509848 A JP2016509848 A JP 2016509848A JP 2016509848 A JP2016509848 A JP 2016509848A JP 6291033 B2 JP6291033 B2 JP 6291033B2
- Authority
- JP
- Japan
- Prior art keywords
- unit
- center
- gravity
- person
- standing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000005484 gravity Effects 0.000 claims description 83
- 238000009826 distribution Methods 0.000 claims description 23
- 238000001514 detection method Methods 0.000 claims description 20
- 238000003860 storage Methods 0.000 claims description 10
- 230000007246 mechanism Effects 0.000 description 8
- 238000006243 chemical reaction Methods 0.000 description 7
- 230000032258 transport Effects 0.000 description 6
- 238000000034 method Methods 0.000 description 5
- 230000008569 process Effects 0.000 description 5
- 230000008859 change Effects 0.000 description 4
- 230000007423 decrease Effects 0.000 description 4
- 230000037396 body weight Effects 0.000 description 3
- 238000002360 preparation method Methods 0.000 description 3
- 230000009467 reduction Effects 0.000 description 3
- 230000001174 ascending effect Effects 0.000 description 2
- 238000009795 derivation Methods 0.000 description 2
- 238000012423 maintenance Methods 0.000 description 2
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 1
- 230000008602 contraction Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000012905 input function Methods 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
Images













Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
- B25J13/087—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices for sensing other physical parameters, e.g. electrical or chemical properties
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H3/00—Appliances for aiding patients or disabled persons to walk about
- A61H3/04—Wheeled walking aids for patients or disabled persons
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
- B25J11/008—Manipulators for service tasks
- B25J11/009—Nursing, e.g. carrying sick persons, pushing wheelchairs, distributing drugs
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J5/00—Manipulators mounted on wheels or on carriages
- B25J5/007—Manipulators mounted on wheels or on carriages mounted on wheels
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G7/00—Beds specially adapted for nursing; Devices for lifting patients or disabled persons
- A61G7/10—Devices for lifting patients or disabled persons, e.g. special adaptations of hoists thereto
- A61G7/1013—Lifting of patients by
- A61G7/1019—Vertical extending columns or mechanisms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G7/00—Beds specially adapted for nursing; Devices for lifting patients or disabled persons
- A61G7/10—Devices for lifting patients or disabled persons, e.g. special adaptations of hoists thereto
- A61G7/1073—Parts, details or accessories
- A61G7/1082—Rests specially adapted for
- A61G7/1092—Rests specially adapted for the arms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H3/00—Appliances for aiding patients or disabled persons to walk about
- A61H3/04—Wheeled walking aids for patients or disabled persons
- A61H2003/043—Wheeled walking aids for patients or disabled persons with a drive mechanism
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/01—Constructive details
- A61H2201/0192—Specific means for adjusting dimensions
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/12—Driving means
- A61H2201/1207—Driving means with electric or magnetic drive
- A61H2201/1215—Rotary drive
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1602—Physical interface with patient kind of interface, e.g. head rest, knee support or lumbar support
- A61H2201/1635—Hand or arm, e.g. handle
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/50—Control means thereof
- A61H2201/5007—Control means thereof computer controlled
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/50—Control means thereof
- A61H2201/5023—Interfaces to the user
- A61H2201/5043—Displays
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/50—Control means thereof
- A61H2201/5023—Interfaces to the user
- A61H2201/5043—Displays
- A61H2201/5046—Touch screens
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/50—Control means thereof
- A61H2201/5058—Sensors or detectors
- A61H2201/5061—Force sensors
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Pain & Pain Management (AREA)
- Nursing (AREA)
- Epidemiology (AREA)
- Human Computer Interaction (AREA)
- Physical Education & Sports Medicine (AREA)
- Rehabilitation Therapy (AREA)
- Life Sciences & Earth Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Manipulator (AREA)
- Rehabilitation Tools (AREA)
- Invalid Beds And Related Equipment (AREA)
Description
なお、介助ロボット10は、左右駆動輪用モータ21f,21gを省略して構成して、使用者により押されて移動するようにしてもよい。
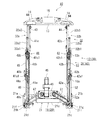
基部カバー22は、図1に示すように、基台21を上方から覆うカバーである。この基部カバー22は、基台21と同様に後方に開口する平面視略U字形状に形成されている。
右スライド部42は、第一スライド部42bおよび第二スライド部42cをカバーするスライドカバー42dを備えている。スライドカバー42dは、スライドカバー41dと同様に構成されている。
起立軌跡Tas1は、図8に示すように、座位の被介助者M1の肩位置Psから始まり、立位の被介助者M1の肩位置Psで終了する、直線状の軌跡である。また、被介助者M1の重心位置G(特に上半身の重心位置である)の軌跡はTg1で表す。起立軌跡Tas1は、実際に健常者の起立動作を撮影し、その肩位置Psの二次元座標(例えばxy座標)に基づいて作成すればよい。なお、起立軌跡は、シミュレーションで作成するようにしてもよい。
なお、上述したデータ、座標は、被介助者M1が着座する椅子やベッドなどの着座部の高さや、被介助者M1の身長に応じて補正するのが望ましい。
(数1)
Nr=(1/2)・Wb+(L2/Lb)・Wa
垂直抗力Nfは、下記数2で表される。
(数2)
Nf=(1/2)・Wb+(L1/Lb)・Wa
数1から数2を減算してWbを削除すると、下記数3が導かれる。
(数3)
Nr−Nf=((Lb−2L1)/Lb)・Wa
上記数3を展開して、長さL1を、長さLb、上半身の重さWa、後側圧力センサ63arの垂直抗力Nrおよび前側圧力センサ63afの垂直抗力Nfで表すと、下記数4のようになる。
(数4)
L1=(Lb/2)・(1−(Nr−Nf)/Wa)
一方、起立動作開始許可がある場合には、制御装置17は、ステップS202にて「YES」と判定し、プログラムをステップS204以降に進めて、介助ロボット10の起立動作を実行する。
重心位置Pgが所定範囲より後方である場合には、制御装置17は、プログラムをステップS212に進めて、アクチュエータ12を制御させて、保持部13の軸方向速度を所定量だけ減少させるか、または保持部13を所定量だけ前傾させる。また、制御装置17は、ステップS212において、保持部13の速度を減少させるとともに前傾させるようにしてもよい。これにより、被介助者M1の上半身が前傾するため、重心位置Pgを前方に移動させることができる。重心位置Pgが所定範囲内に入るまで、制御装置17は、ステップS200−212の処理を繰り返し実行する。
一方、保持部13が起立位置に到達した場合には、制御装置17は、ステップS216にて「YES」と判定し、起立動作を終了する(ステップS220)。制御装置17は、ステップS216にて、保持部13が起立位置に到達したか否かを判定する。具体的には、制御装置17は、保持部13が予め設定された被介助者M1の身長に応じた位置(起立位置に相当する)に到達したか否かを判定することにより、保持部13が起立位置に到達したか否かを判定する。
これによれば、介助ロボット10は、被介助者M1を起立させる際に、より確実に被介助者M1の上半身の重心を所定範囲内に維持することができ、ひいては保持部13に対する被介助者M1の上半身の姿勢を一定範囲内に保持することができる。
これによれば、介助ロボット10は、より適切に被介助者M1の起立を開始させることができる。
これによれば、介助ロボット10は、被介助者M1の起立開始の準備をより適切かつ確実に実行させることができる。
これによれば、介助ロボット10は、被介助者M1の起立軌跡を短くすることができ、起立動作を短縮することができる。また、このように直線軌跡においても、被介助者M1の上半身の重心を適正な範囲に維持することができるため、被介助者M1は起立動作を心地よく感じることができる。さらに、介助ロボット10の構造を簡素化でき、コストダウンを図ることができる。
制御装置117は、上述した制御装置17と同様に、検出装置163から重量配分を取得する(取得部:ステップS302)。制御装置117は、取得部(ステップS302)によって取得された重量配分から、物体Xbの搬送方向に沿った前後方向の重心位置Pgを導出する(重心位置導出部:ステップS304)。制御装置117は、保持部113に保持されている物体Xbを搬送させる場合において、アクチュエータ112を制御して、重心位置導出部(ステップS304)によって導出された重心位置Pgが第一所定範囲内に入るように保持部13を動作させる(第一制御部:ステップS308−312)。
重心位置Pgが第一所定範囲より前方(移動方向前方)にある場合、制御装置117は、ステップS312において、保持部113の速度を増大させるかまたは後傾させる。また、重心位置Pgが第一所定範囲より後方(移動方向後方)にある場合、制御装置117は、ステップS310において、保持部113の速度を減少させるかまたは前傾させる。このように、制御装置117は、保持部113に載置されている物体Xbが安定するように、保持部113の速度を変化させている。
Claims (6)
- 基台と、
被介助者の体の一部を保持し、前記基台に対して少なくとも移動可能かつ傾動可能である保持部と、
前記保持部に設けられ前記被介助者から受ける重量配分を検出する検出装置と、
前記基台に対する前記保持部の動作を行なうアクチュエータと、
前記検出装置から前記重量配分を取得する取得部と、
前記取得部によって取得された前記重量配分から、前記被介助者の前後方向の重心位置を導出する重心位置導出部と、
前記保持部に支えられて着座している前記被介助者を起立させる場合において、前記アクチュエータを制御して、前記重心位置導出部によって導出された前記重心位置が第一所定範囲内に入るように前記保持部を動作させる第一制御部と、
を備えたことを特徴とする介助ロボット。 - 前記第一制御部は、前記重心位置導出部によって導出された前記重心位置が前記第一所定範囲内より前方である場合には、少なくとも、前記保持部の移動方向に沿った速度を速くするか、または前記保持部を後傾させ、一方、前記重心位置導出部によって導出された前記重心位置が前記第一所定範囲内より後方である場合には、少なくとも、前記保持部の移動方向に沿った速度を遅くするか、または前記保持部を前傾させることを特徴とする請求項1記載の介助ロボット。
- 前記第一制御部によって起立動作が開始される前において、前記重心位置導出部によって導出される、着座している前記被介助者の前記重心位置が第二所定範囲内である場合には、前記起立動作の開始を許可し、一方、前記重心位置導出部によって導出された前記重心位置が前記第二所定範囲外である場合には、前記起立動作の開始を禁止する起立動作許否部をさらに備えている請求項1または請求項2記載の介助ロボット。
- 前記第一制御部によって起立動作が開始される前において、前記重心位置導出部によって導出される、着座している前記被介助者の前記重心位置が前記第二所定範囲外である場合には、前記アクチュエータを制御して、前記重心位置導出部によって導出された前記重心位置が前記第二所定範囲内に入るように前記保持部を傾動させる第二制御部をさらに備えている請求項3記載の介助ロボット。
- 前記保持部に支えられて着座している前記被介助者を起立させる場合において、前記被介助者の移動制御部位が通過する起立軌跡であって直線状である起立軌跡を示す起立軌跡用基準データを記憶した記憶部、をさらに備え、
前記第一制御部は、前記アクチュエータを駆動させて、前記保持部を前記起立軌跡用基準データに基づいて動作させている請求項1乃至請求項4の何れか一項記載の介助ロボット。 - 基台と、
物体を保持し、前記基台に対して少なくとも移動可能かつ傾動可能に搬送する保持部と、
前記保持部に設けられ前記物体から受ける重量配分を検出する検出装置と、
前記基台に対する前記保持部の動作を行なうアクチュエータと、
前記検出装置から前記重量配分を取得する取得部と、
前記取得部によって取得された前記重量配分から、前記物体の搬送方向に沿った前後方向の重心位置を導出する重心位置導出部と、
前記保持部に保持されている前記物体を搬送させる場合において、前記アクチュエータを制御して、前記重心位置導出部によって導出された前記重心位置が第一所定範囲内に入るように前記保持部を動作させる第一制御部と、
を備えたことを特徴とする物体搬送装置。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2014/059266 WO2015145756A1 (ja) | 2014-03-28 | 2014-03-28 | 介助ロボットおよび物体搬送装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2015145756A1 JPWO2015145756A1 (ja) | 2017-04-13 |
| JP6291033B2 true JP6291033B2 (ja) | 2018-03-14 |
Family
ID=54194342
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016509848A Active JP6291033B2 (ja) | 2014-03-28 | 2014-03-28 | 介助ロボットおよび物体搬送装置 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP6291033B2 (ja) |
| WO (1) | WO2015145756A1 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017094128A1 (ja) | 2015-12-01 | 2017-06-08 | 富士機械製造株式会社 | 介助装置 |
| FR3047682B1 (fr) * | 2016-02-12 | 2019-11-01 | Kompaï Robotics | Robot mobile d'assistance comprenant au moins un systeme d'appui |
| EP3593779B1 (en) * | 2017-03-07 | 2024-06-19 | Fuji Corporation | Assistance device |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003102795A (ja) * | 2001-09-28 | 2003-04-08 | Kongo Seisakusho:Kk | 歩行器 |
| JP2007195814A (ja) * | 2006-01-27 | 2007-08-09 | Tokyo Metropolitan Univ | 動作支援装置 |
| JP4608661B2 (ja) * | 2006-08-25 | 2011-01-12 | 公立大学法人高知工科大学 | 立ち上がり訓練機 |
| JP5245840B2 (ja) * | 2009-01-09 | 2013-07-24 | トヨタ自動車株式会社 | 移乗装置、バランス状態評価装置、バランス状態評価方法、及びプログラム |
| JP5773718B2 (ja) * | 2011-04-11 | 2015-09-02 | 富士機械製造株式会社 | 立ち上がり動作アシストロボット |
-
2014
- 2014-03-28 WO PCT/JP2014/059266 patent/WO2015145756A1/ja active Application Filing
- 2014-03-28 JP JP2016509848A patent/JP6291033B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2015145756A1 (ja) | 2017-04-13 |
| WO2015145756A1 (ja) | 2015-10-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6126139B2 (ja) | 移動補助ロボット | |
| JP6301927B2 (ja) | 介助ロボット | |
| JP6310060B2 (ja) | 介助ロボット | |
| JP6116689B2 (ja) | 介助ロボット | |
| JP6267215B2 (ja) | 介助ロボット | |
| JP6291033B2 (ja) | 介助ロボットおよび物体搬送装置 | |
| JP2014239603A (ja) | 手動推進車両 | |
| AU2016423311B2 (en) | Assistance device | |
| JP6310059B2 (ja) | 移動補助装置 | |
| JP6603345B2 (ja) | 介助ロボット | |
| JP6306769B2 (ja) | 移動補助ロボット | |
| JP5471304B2 (ja) | 移乗支援装置 | |
| JP2017169861A (ja) | アシスト装置及びアシスト方法 | |
| JP6408666B2 (ja) | 介助ロボット | |
| JP6586474B2 (ja) | 介助ロボット | |
| JP6722811B2 (ja) | 介助ロボット | |
| JP6651037B1 (ja) | 歩行補助装置 | |
| JP6265143B2 (ja) | バランス訓練システム | |
| JP2024000796A (ja) | 立ち上がり補助機 | |
| JP2014195511A (ja) | 歩行補助装置 | |
| JP2010132110A (ja) | 移動体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170203 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171107 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171228 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180116 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180208 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6291033 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |