JP6232467B2 - 荷役車両システム、休憩管理方法及び制御プログラム - Google Patents
荷役車両システム、休憩管理方法及び制御プログラム Download PDFInfo
- Publication number
- JP6232467B2 JP6232467B2 JP2016094716A JP2016094716A JP6232467B2 JP 6232467 B2 JP6232467 B2 JP 6232467B2 JP 2016094716 A JP2016094716 A JP 2016094716A JP 2016094716 A JP2016094716 A JP 2016094716A JP 6232467 B2 JP6232467 B2 JP 6232467B2
- Authority
- JP
- Japan
- Prior art keywords
- unit
- driver
- cargo handling
- break
- work
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000007726 management method Methods 0.000 title claims description 101
- 238000000034 method Methods 0.000 claims description 38
- 230000000284 resting effect Effects 0.000 claims description 10
- 238000001514 detection method Methods 0.000 description 45
- 230000005540 biological transmission Effects 0.000 description 42
- 230000008569 process Effects 0.000 description 25
- 238000004364 calculation method Methods 0.000 description 24
- 238000012546 transfer Methods 0.000 description 15
- 238000012545 processing Methods 0.000 description 13
- 238000011084 recovery Methods 0.000 description 7
- 238000010586 diagram Methods 0.000 description 6
- 238000004891 communication Methods 0.000 description 5
- 230000006870 function Effects 0.000 description 5
- 230000008859 change Effects 0.000 description 3
- 239000000284 extract Substances 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- QVGXLLKOCUKJST-UHFFFAOYSA-N atomic oxygen Chemical compound [O] QVGXLLKOCUKJST-UHFFFAOYSA-N 0.000 description 1
- 230000004397 blinking Effects 0.000 description 1
- 230000036772 blood pressure Effects 0.000 description 1
- 230000036760 body temperature Effects 0.000 description 1
- 239000012141 concentrate Substances 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000005389 magnetism Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000012634 optical imaging Methods 0.000 description 1
- 229910052760 oxygen Inorganic materials 0.000 description 1
- 239000001301 oxygen Substances 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000036387 respiratory rate Effects 0.000 description 1
- 210000004243 sweat Anatomy 0.000 description 1
Images








Landscapes
- Forklifts And Lifting Vehicles (AREA)
Description
本発明は、例えば、荷役車両システム、休憩管理方法及び制御プログラムに関する。
近年、荷積みや荷下ろしに用いられる荷役車両であるフォークリフトにおいて、運転者を必要とせず、無人で走行して荷役を行う無人運転のフォークリフトが利用されている。このような無人運転を可能とするフォークリフトでは、無人運転を行うだけではなく、有人運転と無人運転をスイッチにより切り替えて行うことを可能とするフォークリフトも存在する(例えば、特許文献1参照)。
このような無人運転と有人運転の双方の機能を兼ね備える理由として、無人運転では、例えば、JIS D 6802の規格等により、安全性を確保するため、走行速度や、リフトの上昇速度の上限値が、有人運転の際よりもかなり低速に設定されている。そのため、急いで作業を行わなければならない場合、有人運転による操作が必要となってくる。なお特許文献1によれば、運転者は予め定められた待機位置に待機しているフォークリフトに乗降する。
ところで、有人運転を継続して行っていると運転者に疲労が蓄積するため、定期的に休憩を入れるようにしなければならないが、運転者が疲労に気が付かずに作業に集中してしまっているような場合もある。このような場合、特許文献1に記載の技術に対して、更に、有人運転から無人運転に自動的に切り替える仕組みを組み込むことで、疲労している運転者に休憩を取らせることを促すことができる。
他方、複数のフォークリフトが稼働する倉庫等において、上記のような有人運転から無人運転への自動的な切り替えの仕組みを導入することで、全ての運転者を休憩させてしまう場合も想定され、緊急または非定常な荷役作業が発生した場合に迅速に対応できなくなるという問題がある。
本発明の第1の態様によれば、荷役車両システムは、複数の運転者それぞれによって操作される複数の荷役車両と、前記複数の荷役車両を管理する管理装置と、を備える荷役車両システムであって、前記管理装置は、前記複数の運転者それぞれについて、当該運転者が休憩しているか否かを判定する休憩判定部と、前記休憩判定部により休憩していると判定された前記運転者のうち、疲労度が所定の閾値以下である運転者に、休憩の終了を通知する通知部と、緊急荷役作業の入力を受け付ける緊急荷役作業入力部と、無人運転の運転状態と有人運転の運転状態とを切り替える運転切替スイッチ部と、を備え、前記通知部は、前記休憩判定部が全ての前記運転者が休憩していると判定し、かつ前記緊急荷役作業の入力があった場合に、前記複数の運転者のうち最も疲労度が低い運転者に、休憩の終了を通知し、前記運転切替スイッチ部は、前記無人運転の運転状態から前記有人運転の運転状態へと切り替えることを特徴とする。
本発明の第2の態様によれば、第1の態様に係る荷役車両システムにおいて、前記通知部は、前記休憩判定部が全ての前記運転者が休憩していると判定し、かつ前記緊急荷役作業の入力があった場合に、前記複数の運転者のうち少なくとも1人の疲労度より高くなるまで閾値を引き上げることを特徴とするものであってよい。
本発明の第3の態様によれば、第1または第2の態様に係る荷役車両システムにおいて、前記通知部は、前記休憩判定部が全ての前記運転者が休憩していると判定し、かつ前記緊急荷役作業の入力があった場合に、前記休憩の終了を通知する対象を、前記複数の運転者のうち最も疲労度が低い運転者から、前記緊急荷役作業のために休憩を中断した回数が所定数未満の運転者のうち最も疲労度が低い運転者へと換えたことを特徴とするものであってよい。
本発明の第4の態様によれば、第1から第3の何れかの態様に係る荷役車両システムは、前記管理装置は、前記通知部が休憩の終了を通知する運転者が搭乗する前記荷役車両に対して無人運転から有人運転への切り替えを指示する有人走行指示情報を送信する切替指示部を備え、前記複数の荷役車両それぞれは、前記有人走行指示情報を前記管理装置から受信した場合に、運転状態を前記無人運転から前記有人運転に切り替える運転切替スイッチ部を備えることを特徴とするものであってよい。
本発明の第5の態様によれば、休憩管理方法は、複数の荷役車両それぞれに搭乗する複数の運転者の休憩管理方法であって、管理装置が、前記複数の運転者それぞれについて、当該運転者が休憩しているか否かを判定し、前記管理装置が、緊急荷役作業の入力を受け付け、前記管理装置が、無人運転の運転状態と有人運転の運転状態とを切り替え、前記管理装置が、全ての前記運転者が休憩していると判定し、かつ前記緊急荷役作業の入力があった場合に、前記複数の運転者のうち最も疲労度が低い運転者に、休憩の終了を通知し、無人運転の運転状態と有人運転の運転状態とを切り替えることを特徴とする。
本発明の第6の態様によれば、管理装置の制御プログラムは、複数の運転者それぞれによって操作される複数の荷役車両を管理する管理装置のコンピュータに、前記複数の運転者それぞれについて、当該運転者が休憩しているか否かを判定する手順、緊急荷役作業の入力を受け付ける手順、無人運転の運転状態と有人運転の運転状態とを切り替える手順、前記管理装置が、全ての前記運転者が休憩していると判定し、かつ前記緊急荷役作業の入力があった場合に、前記複数の運転者のうち最も疲労度が低い運転者に、休憩の終了を通知し、無人運転の運転状態と有人運転の運転状態とを切り替える手順を実行させる。
本発明のいくつかの態様によれば、荷役車両システムは、全ての運転者が休憩しているときに緊急荷役作業が発生した場合に、最も疲労度が小さい運転者を休憩から戻す。これにより、最も疲労度が小さい運転者に、発生した緊急荷役作業をさせることが可能となる。
以下、本発明の実施形態について図面を参照して説明する。
図1は、本発明の実施形態による荷役システムの構成を示す概略図である。荷役システムは、荷役車両である複数のフォークリフト100と、各運転者2に装着される生体情報検出装置200と、各運転者が所有する携帯端末210と、フォークリフト100を管理する管理装置300とを備える。フォークリフト100は、有人走行と無人走行とを切り替え可能とする。
図1は、本発明の実施形態による荷役システムの構成を示す概略図である。荷役システムは、荷役車両である複数のフォークリフト100と、各運転者2に装着される生体情報検出装置200と、各運転者が所有する携帯端末210と、フォークリフト100を管理する管理装置300とを備える。フォークリフト100は、有人走行と無人走行とを切り替え可能とする。
フォークリフト100の走行経路の路面には、フォークリフト100の進行を誘導する誘導ライン及び位置マーク400が設けられる。位置マーク400は、誘導ライン上の一定の距離間隔または誘導ラインが交差する箇所に複数設けられる。位置マーク400は、例えば、特開2013−171368号公報に示されるようなカウント用マークや固有マークである。本実施形態では、位置マーク400は、例えば、位置を示すバーコードや二次元コードのような識別情報が示されているものとする。この識別情報を撮影された画像が解析されることにより位置を示す識別番号が特定される。
生体情報検出装置200は、例えば、特開2015−154868号公報に示されるようなリストバンド型のウェアラブル端末装置が適用され、運転者2に装着され、運転者2の生体情報を予め定められる間隔で繰り返し検出する。検出する生体情報は、例えば、脈拍数、心拍数、発汗量、血圧、呼吸数、酸素飽和度、体温などである。また生体情報検出装置200は、自装置が存在する位置を示す位置情報を検出する。位置情報の検出は、GPS(Global Positioning System)などのNSS(Navigation Satellite System)により行われる。また、生体情報検出装置200は、検出した生体情報および位置情報を無線通信手段によりフォークリフト100の管理装置300の送受信部304に送信する。
管理装置300は、荷役車両呼出装置の一例である。
管理装置300は、荷役車両呼出装置の一例である。
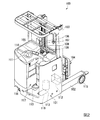
図2は、本発明の実施形態によるフォークリフト100を示す斜視図である。荷役車両であるフォークリフト100は、車両本体101の前方に、車両本体101の幅方向の端に1つずつ、前方へ延びる1対のストラドルアーム102が設けられる。1対のストラドルアーム102には、車両本体101の上方へ延びるマスト103が設けられている。マスト103には、荷役対象物(以下、荷物という)を支持して昇降するフォーク104が取り付けられており、当該マスト103によってフォーク104の昇降動作が案内される。フォークリフト100では、前輪115がストラドルアーム102に設けられ、後輪116が車両本体101に設けられる。
フォーク104は、マスト103に沿って昇降する。フォーク104をマスト103に沿って昇降させる制御を、リフト制御という。また、フォーク104の基部を回動させてフォーク104の先端部を上下方向に傾ける制御をチルト制御という。マスト103は、フォーク104と共にストラドルアーム102に沿って進退する。マスト103及びフォーク104をストラドルアーム102に沿って進退させる制御を、リーチ制御という。
なお、マスト103及びフォーク104は、油圧回路によって作動する。
なお、マスト103及びフォーク104は、油圧回路によって作動する。
また、車両本体101には、運転者2が搭乗する運転席117が設けられる。運転席117には、リフトレバー106、チルトレバー107、リーチレバー108、アクセルレバー109、ブレーキペダル110、ステアリングハンドル111、ディスプレイ114、フロアスイッチ118が設けられる。
アクセルレバー109は、モータを駆動させて車両本体101を前進または後退させる際に、運転者2によって操作される。ブレーキペダル110は、車両本体101が前進または後退している場合に走行の速度を低下させたり、車両本体101を停止させたりする際に運転者2によって操作される。ステアリングハンドル111は、車両本体101の走行方向を変更する際に、運転者2によって操作される。リフトレバー106、チルトレバー107、リーチレバー108は、それぞれ、リフト制御、チルト制御、リーチ制御の際に、運転者2によって操作されるレバーである。
ディスプレイ114は、フォークリフト100の走行速度、走行距離、荷重センサ112が検出するフォーク104の負荷などの情報を表示する他、運転状態が、無人運転状態であるか有人運転状態であるかを示す情報や、有人運転から無人運転に切り替わる際、または、無人運転から有人運転に切り替わる際に、切り替わることを事前に運転者2に知らせる情報を表示する。切り替わることを事前に運転者2に知らせる情報としては、例えば、ディスプレイ114の一部に点滅させるマークを表示する報知情報であってもよいし、スピーカーが内蔵されていれば音で通知するといった報知情報であってもよいし、ディスプレイ114に切り替わるまでの時間を示してカウントダウンさせていくような情報であってもよい。
車両制御装置105は、車両本体101に内蔵され、フォークリフト100の走行の制御、フォーク104の制御、有人運転と無人運転との切り替えの制御などを行う。荷重センサ112は、フォーク104の負荷、すなわちフォーク104によって持ち上げられる荷物の重量を検出する。カメラ113は、例えば、CCD(Charge Coupled Device)などの光学的撮像手段である。カメラ113は、走行経路の路面に敷設され、無人運転の際にフォークリフト100の進行を誘導する誘導ライン、及び誘導ライン上の一定の距離間隔または誘導ラインが交差する箇所に設けられる位置を示す位置マーク400を予め定められる所定頻度(例えば、30回/秒)で逐次撮影し、撮影した画像の情報を車両制御装置105に出力する。
フロアスイッチ118は、運転席117のフロアに敷設されるスイッチである。運転者がフォークリフト100に搭乗すると、運転者の体重によりフロアスイッチ118がオンになる。他方、運転者がフォークリフト100から降りると、フロアスイッチ118がオフになる。
図3は、本実施形態によるフォークリフトの構成を示すブロック図である。フォークリフト100において、以下、図2で説明した構成以外の構成について説明する。フォークリフト100の車両制御装置105は、送受信部501、作業状況管理部502、自動運転制御部503、運転切替スイッチ部504、走行制御部508、荷役制御部509、積載検出部510、位置検出部511、記憶部512、搭乗判定部513を備える。
送受信部501は、例えば、WiFi(登録商標)などの無線通信手段であり、管理装置300との間で情報の送受信を行う。作業状況管理部502は、走行制御部508、荷役制御部509、積載検出部510、位置検出部511が出力する情報に基づいて、作業状況を示す情報を検出する。ここで、作業状況を示す情報とは、例えば、作業中の状態であるか、作業が完了している状態であるか等を示す情報である。また、作業状況管理部502は、作業が完了した場合、作業の完了を通知するため、当該作業を示す作業特定情報を管理装置300に送信する。また送受信部501は、管理装置300から無人運転と有人運転とを切り替える切替指示を受信する。送受信部501は、移動指示受信部の一例である。
運転切替スイッチ部504は、有人運転と無人運転とを切り替えるスイッチであり、管理装置300から受信する指示に基づいて、運転状態の切り替えを行う。また、運転切替スイッチ部504は、送受信部501が無人走行指示を受信した場合、その時点での運転状態が有人運転状態であるとき、無人運転に切り替える。また、運転切替スイッチ部504は、送受信部501が有人走行指示を受信した場合、その時点での運転状態が無人運転状態であるとき、有人運転に切り替える。また、運転切替スイッチ部504は、作業状況を示す情報が、作業中を示している場合、運転状態を切り替えずに、作業が完了するまで待機し、作業状況を示す情報が、作業の完了を示している場合に運転状態の切り替えを行う。また、運転切替スイッチ部504は、切替後の運転状態、すなわち現時点での運転状態を示す情報を記憶部512の運転状態情報512Bに書き込んで記憶させる。
荷役制御部509は、有人運転状態の場合、運転者2によるリフトレバー106、チルトレバー107、及びリーチレバー108の操作を受けて、油圧回路を駆動させて、フォーク104に対してリフト制御、チルト制御、及びリーチ制御を行う。また、荷役制御部509は、無人運転状態の場合、自動運転制御部503からの制御指示情報を受けて、油圧回路を駆動させて、フォーク104に対してリフト制御、チルト制御、及びリーチ制御を行う。また、荷役制御部509は、油圧回路を駆動させて行っている制御の種類を示す情報を出力する。例えば、荷役制御部509は、リフト制御であれば、フォーク104を上昇させて荷物を持ち上げているのか、フォーク104を下降させて荷物を降ろしているのか等を示す情報を出力する。なお、以下では、フォーク104を上昇させて荷物を持ち上げることを、リフトアップといい、フォーク104を下降させて荷物を降ろすことを、リフトダウンという。
走行制御部508は、有人運転状態の場合、運転者2によるアクセルレバー109、ブレーキペダル110、ステアリングハンドル111の操作を受けて、モータを駆動させて前輪115と後輪116を動かしてフォークリフト100を走行させる。また、走行制御部508は、無人運転状態の場合、自動運転制御部503からの制御指示情報を受けて、モータを駆動させて前輪115と後輪116を動かしてフォークリフト100を走行させる。また、走行制御部508は、走行速度を示す情報を逐次出力する。
積載検出部510は、荷重センサ112が逐次出力する、フォーク104によって持ち上げられている荷物の重量の値に基づいて、荷物が積載されているか否かを示す情報を逐次出力する。位置検出部511は、カメラ113が逐次撮影する誘導ラインや位置マーク400の画像を解析して誘導ラインからのずれを示す情報や位置を示す情報を逐次出力する。
自動運転制御部503は、無人運転の状態に切り替えられた場合に、管理装置300から送信される計画された作業を示す作業特定情報を受信する。また、自動運転制御部503は、受信した作業特定情報に基づいて、走行制御部508、荷役制御部509に制御指示情報を出力して、荷物が荷置きされている場所に向かってフォークリフト100を走行させ、荷物をフォーク104で持ち上げさせ、荷物の移送先まで走行させ、当該移送先において荷物を降ろさせる処理を行う。また、自動運転制御部503は、位置検出部511が出力する誘導ラインからのずれや、位置を示す情報に基づいて、誘導ラインに沿って走行するように走行制御部508に制御指示情報を出力する。
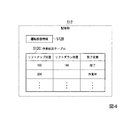
図4は、本実施形態による車両制御装置の記憶部に記憶されるデータの構成を示す図である。記憶部512は、図4に示す運転状態情報512B、作業状況テーブル512Cの情報を記憶する。運転状態情報512Bは、前述したように運転切替スイッチ部504によって書き込まれる、運転状態を示す情報である。作業状況テーブル512Cは、「リフトアップ位置」、「リフトダウン位置」、「完了状態」の項目を有するテーブルであり、作業状況管理部502によって、作業が行われるごとにレコードが生成され、各々の項目に、荷物をリフトアップした位置を示す情報、荷物をリフトダウンした位置を示す情報、作業の完了状態を示す情報のそれぞれが書き込まれる。
図5は、本実施形態による管理装置の構成を示すブロック図である。管理装置300は、作業計画情報記憶部301、作業計画情報選択部302、作業済情報書込部303、送受信部304、車両状態書込部305、疲労度算出部306、疲労度判定部307、位置特定部308、指示生成部309、回復通知部310、運転状態判定部311、緊急荷役作業入力部312を備える。送受信部304は、フォークリフト100の車両制御装置105の送受信部501および生体情報検出装置200との間で無線通信手段により情報の送受信を行う。作業計画情報記憶部301は、図6に示す作業計画情報テーブル301Aと車両テーブル301Bと運転者テーブル301Cと基準値テーブル301Dとを記憶する。
作業計画情報テーブル301Aは、作業計画情報を構成する「車両ID(Identification)」、「荷物ID」、「荷置き位置ID」、「移送先位置ID」、「完了状態」の項目を有する。「車両ID」の項目には、フォークリフト100ごとに予め付与される識別番号が書き込まれる。「荷物ID」の項目には、荷物ごとに予め付与される識別番号が書き込まれる。「荷置き位置ID」の項目には、移送前に荷物が荷置きされている位置を示す識別番号が書き込まれる。「移送先位置ID」の項目には、荷物の移送先の位置を示す識別番号が書き込まれる。「完了状態」の項目には、荷物の移送が完了した場合、「完了」が書き込まれ、荷物の移送が完了していない場合、「未完了」が書き込まれる。移送される荷物が新たに荷置きされた場合、例えば、管理装置300の操作者の操作により、当該荷物に対応づけられている「荷物ID」、「荷置き位置ID」、「移送先位置ID」のそれぞれの識別番号が書き込まれ、「完了状態」の項目には初期情報として「未完了」が書き込まれる。なお、上述した作業特定情報は、「荷置き位置ID」の項目に書き込まれている荷物が荷置きされている位置を示す識別番号と、「移送先位置ID」の項目に書き込まれている荷物の移送先の位置を示す識別番号とを含む情報である。
車両テーブル301Bは、「車両ID」、「位置」、「運転状態」、「完了状態」の項目を有する。「車両ID」の項目には、フォークリフト100ごとに予め付与される識別番号が書き込まれる。「位置」の項目には、フォークリフト100の位置を示す情報が書き込まれる。フォークリフト100の位置を示す情報の例としては、位置マーク400の識別番号、およびNSSにより得られる位置情報が挙げられる。「運転状態」の項目には、フォークリフト100の運転状態として、「無人運転」または「有人運転」が書き込まれる。「完了状態」の項目には、荷物の移送中である場合、「作業中」が書き込まれ。荷物の移送中でない場合、「完了」が書き込まれる。
運転者テーブル301Cは、「端末ID」、「車両ID」、「休憩中断回数」、「平常時生体情報」の項目を有する。「端末ID」の項目には、生体情報検出装置200ごとに予め付与される識別番号が書き込まれる。「車両ID」の項目には、当該生体情報検出装置200を装着する運転者2が運転するフォークリフト100の識別番号が書き込まれる。「休憩中断回数」の項目には、運転者2が緊急荷役作業を行うために休憩を中断した回数が書き込まれる。「平常時生体情報」の項目には、作業前に生体情報検出装置200によって計測される運転者2の平常時の生体情報が書き込まれる。
基準値テーブル301Dは、「端末ID」、「第1の閾値」、「第2の閾値」の項目を有する。「端末ID」の項目には、生体情報検出装置200ごとに予め付与される識別番号が書き込まれる。「第1の閾値」の項目には、運転者2が休憩すべきか否かの判定に用いられる疲労度の閾値が書き込まれる。「第2の閾値」の項目には、運転者2が休憩から復帰すべきか否かの判定に用いられる疲労度の閾値が書き込まれる。
作業計画情報選択部302は、作業計画情報記憶部301に記憶されている作業計画情報テーブル301Aに含まれる情報のうち、「車両ID」が作業項目情報の送信対象となるフォークリフト100の識別番号を示し、かつ「完了状態」の項目が「未完了」となっている作業計画情報を読み出す。作業計画情報選択部302は、読みだした作業計画情報から「荷置き位置ID」の項目の位置を示す識別番号と、「移送先位置ID」の項目の位置を示す識別番号とを含む情報、すなわち作業特定情報を選択して送受信部304を通じてフォークリフト100の車両制御装置105に送信する。作業済情報書込部303は、フォークリフト100の車両制御装置105から、完了した作業を示す作業特定情報を送受信部304を通じて受信すると、当該作業特定情報に含まれる識別番号の組み合わせに対応する作業計画情報テーブル301Aの情報を検出し、当該情報の「完了状態」の項目を「未完了」から「完了」に書き換える。
車両状態書込部305は、送受信部304を通じてフォークリフト100から受信する情報に基づいて、作業計画情報記憶部301に記憶されている車両テーブル301Bに含まれる情報を更新する。
疲労度算出部306は、生体情報検出装置200が出力する生体情報を送受信部304を通じて受信し、受信した生体情報に基づいて疲労度の算出を行う。ここで、疲労度は、生体情報に基づいて算出される値であり、例えば、運転者2に疲労が蓄積されるほど大きくなる0以上の値である。疲労度判定部307は、疲労度算出部306が算出した疲労度に基づいて、運転者2が疲労しているか否か、また、運転者2が疲労から回復したか否かを判定する。位置特定部308は、生体情報検出装置200から位置情報を受信することで、運転者2の位置を特定する。指示生成部309は、疲労度判定部307の判定結果および位置特定部308が特定した位置情報に従って、フォークリフト100に対する指示情報を生成する。指示生成部309が生成した指示情報は、送受信部304を介してフォークリフト100に送信される。指示生成部309は、移動指示部の一例である。回復通知部310は、疲労度判定部307の判定結果が、運転者2が疲労から回復したことを示す場合に、送受信部を介して当該運転者2が所有する携帯端末210に、疲労から回復したことを通知する。
疲労度算出部306は、生体情報検出装置200が出力する生体情報を送受信部304を通じて受信し、受信した生体情報に基づいて疲労度の算出を行う。ここで、疲労度は、生体情報に基づいて算出される値であり、例えば、運転者2に疲労が蓄積されるほど大きくなる0以上の値である。疲労度判定部307は、疲労度算出部306が算出した疲労度に基づいて、運転者2が疲労しているか否か、また、運転者2が疲労から回復したか否かを判定する。位置特定部308は、生体情報検出装置200から位置情報を受信することで、運転者2の位置を特定する。指示生成部309は、疲労度判定部307の判定結果および位置特定部308が特定した位置情報に従って、フォークリフト100に対する指示情報を生成する。指示生成部309が生成した指示情報は、送受信部304を介してフォークリフト100に送信される。指示生成部309は、移動指示部の一例である。回復通知部310は、疲労度判定部307の判定結果が、運転者2が疲労から回復したことを示す場合に、送受信部を介して当該運転者2が所有する携帯端末210に、疲労から回復したことを通知する。
運転状態判定部311は、作業計画情報記憶部301が記憶する車両テーブル301Bを参照し、各フォークリフト100の運転状態を判定する。緊急荷役作業入力部312は、管理者から緊急かつ非定常の荷役作業である緊急荷役作業の情報の入力を受け付ける。緊急荷役作業の情報には、緊急荷役作業の対象となる荷物の荷置き位置および移送先位置が含まれる。運転状態判定部311は、複数の運転者それぞれについて、当該運転者が休憩しているか否かを判定する休憩判定部の一例である。
(位置情報の管理処理)
ここで、管理装置300にフォークリフト100の位置の情報を更新させる方法について説明する。
フォークリフト100の車両制御装置105の位置検出部511は、フォークリフト100の走行中、運転状態が有人運転であるか無人運転であるかに関わらず、定期的にフォークリフト100の位置を検出する。具体的には、位置検出部511は、カメラ113によって逐次撮影される位置マーク400の画像を解析し、位置マーク400の識別番号を位置情報として抽出する。作業状況管理部502は、位置検出部511が検出した位置情報を、管理装置300に送信する。これにより、管理装置300の車両状態書込部305は、作業計画情報記憶部301が記憶する、「車両ID」が位置情報の送信元の識別番号を示す情報のうち、車両テーブル301Bの「位置」の項目を、受信した位置情報に書き換える。これにより、車両テーブル301Bは、各フォークリフト100の最新の位置情報を記憶することができる。
ここで、管理装置300にフォークリフト100の位置の情報を更新させる方法について説明する。
フォークリフト100の車両制御装置105の位置検出部511は、フォークリフト100の走行中、運転状態が有人運転であるか無人運転であるかに関わらず、定期的にフォークリフト100の位置を検出する。具体的には、位置検出部511は、カメラ113によって逐次撮影される位置マーク400の画像を解析し、位置マーク400の識別番号を位置情報として抽出する。作業状況管理部502は、位置検出部511が検出した位置情報を、管理装置300に送信する。これにより、管理装置300の車両状態書込部305は、作業計画情報記憶部301が記憶する、「車両ID」が位置情報の送信元の識別番号を示す情報のうち、車両テーブル301Bの「位置」の項目を、受信した位置情報に書き換える。これにより、車両テーブル301Bは、各フォークリフト100の最新の位置情報を記憶することができる。
(作業状況の管理処理)
図7は、フォークリフト100と管理装置300とにおいて作業の進行状況に応じてそれぞれ、作業状況テーブル512Cと作業計画情報テーブル301Aとを更新していく処理を示すフローチャートである。当該フローチャートの処理は、フォークリフト100が、有人運転状態であるか無人運転状態であるかに関わらず継続して行われる処理である。
図7は、フォークリフト100と管理装置300とにおいて作業の進行状況に応じてそれぞれ、作業状況テーブル512Cと作業計画情報テーブル301Aとを更新していく処理を示すフローチャートである。当該フローチャートの処理は、フォークリフト100が、有人運転状態であるか無人運転状態であるかに関わらず継続して行われる処理である。
フォークリフト100の車両制御装置105の作業状況管理部502が、荷役制御部509が出力する制御の種類を示す情報に基づいて、フォーク104を昇降させるリフト制御が開始されたことを検出する(ステップSa1)。作業状況管理部502は、モータを駆動する走行制御部508が出力する走行速度を示す情報に基づいて、フォークリフト100が走行中であるか停止中であるかを判定する(ステップSa2)。
走行中と判定した場合(ステップSa2:走行中)、荷置き位置や移送先の位置において、荷物を持ち上げたり、降ろしたりしている状態ではないと想定されるため、作業状況管理部502は、ステップSa1からの処理を繰り返す。停止中と判定した場合(ステップSa2:停止中)、作業状況管理部502は、カメラ113によって逐次撮影される位置マーク400の画像に基づいて、位置検出部511が解析して出力する位置を示す識別番号を位置検出部511から取得する(ステップSa3)。作業状況管理部502は、荷役制御部509によるリフト制御の終了を検出すると、行われたリフト制御がリフトアップであるかリフトダウンであるかを判定する(ステップSa4)。
行われたリフト制御が、リフトアップであると判定した場合(ステップSa4:リフトアップ)、作業状況管理部502は、積載検出部510が出力するフォーク104に積載されている荷物の重量を示す情報に基づいて、積載物が存在するか否かを判定する(ステップSa5)。例えば、重量を示す情報が0[kg]を示していれば、積載物が存在しないと判定し、重量を示す情報が0[kg]より大きな値を示していれば、積載物が存在すると判定する。積載物が存在すると判定した場合(ステップSa5:積載物有)、荷物をフォーク104で持ち上げた状態であると想定される。そのため、作業状況管理部502は、送受信部501を介して、作業を開始した旨を示す開始情報を、管理装置300に送信する(ステップSa6)。管理装置300の車両状態書込部305は、送受信部304を介して開始情報を受信すると、作業計画情報記憶部301が記憶する車両テーブル301Bを更新する。具体的には、車両状態書込部305は、作業計画情報記憶部301が記憶する「車両ID」が開始情報の送信元の識別番号を示す情報のうち、車両テーブル301Bの「完了状態」の項目を、「作業中」に書き換える。
また、作業状況管理部502は、記憶部512の作業状況テーブル512Cにおいて「リフトアップ位置」、「リフトダウン位置」、「完了状態」の項目からなるレコードを1つ生成して、「リフトアップ位置」の項目にステップSa3で位置検出部511から取得した位置を示す識別番号を書き込む。また、作業状況管理部502は、「完了状態」の項目に、作業途中であることを示す「作業中」を書き込み、ステップSa1からの処理を繰り返す(ステップSa7)。一方、ステップSa5において、積載物が存在しないと判定した場合(ステップSa5:積載物無)、単に、フォーク104を上昇させただけの動きと想定されるため、ステップSa1からの処理を繰り返す。
ステップSa4において、行われたリフト制御が、リフトダウンであると判定した場合(ステップSa4:リフトダウン)、作業状況管理部502は、積載検出部510が出力するフォーク104に積載されている荷物の重量を示す情報に基づいて、積載物が存在するか否かを判定する(ステップSa8)。積載物が存在しないと判定した場合(ステップSa8:積載物無)、荷物を降ろした状態であると想定される。そのため、作業状況管理部502は、記憶部512の作業状況テーブル512Cにおいて「完了状態」の項目が「作業中」となっている「リフトアップ位置」の項目から位置を示す識別番号を読み出す。作業状況管理部502は、読みだしたリフトアップの位置を示す識別番号と、ステップSa3で位置検出部511から取得したリフトダウンの位置を示す識別番号とを含む作業特定情報を、送受信部501を通じて管理装置300に送信する(ステップSa9)。管理装置300の車両状態書込部305は、送受信部304を介して完了情報を受信すると、作業計画情報記憶部301が記憶する車両テーブル301Bを更新する。具体的には、車両状態書込部305は、作業計画情報記憶部301が記憶する「車両ID」が完了情報の送信元の識別番号を示す情報のうち、車両テーブル301Bの「完了状態」の項目を、「完了」に書き換える。また、管理装置300の作業済情報書込部303は、完了情報に基づいて作業計画情報記憶部301が記憶する作業計画情報テーブル301Aを更新する。具体的には、作業済情報書込部303は、作業特定情報の送信元の識別番号と、作業特定情報に含まれるリフトアップの位置を示す識別番号と、リフトダウンの位置を示す識別番号との組み合わせに一致する作業計画情報を作業計画情報記憶部301の作業計画情報テーブル301Aから検出する。作業済情報書込部303は、検出した作業計画情報の「完了状態」の項目を「未完了」から「完了」に書き換える。
作業状況管理部502は、記憶部512の作業状況テーブル512Cにおいて「完了状態」の項目が「作業中」となっている情報において、空欄になっている「リフトダウン位置」の項目に位置検出部511から取得した位置を示す識別番号を書き込む。また、作業状況管理部502は、「完了状態」の項目に、作業が完了したことを示す「完了」を書き込み、ステップSa1からの処理を繰り返す(ステップSa10)。一方、ステップSa8において、積載物が存在すると判定した場合(ステップSa8:積載物有)、単に、荷物を積載したままフォーク104を下降させただけの動きと想定されるため、ステップSa1からの処理を繰り返す。
このように、管理装置300において、作業計画情報テーブル301Aに記憶される作業計画情報の「完了状態」の項目を参照することで、完了している作業と、未完了の作業とを検出することができる。また、車両テーブル301Bに記憶される「完了状態」の項目を参照することで、各フォークリフト100が作業中の状態であるか、作業が完了している状態であるかという作業状況を示す情報を検出することができる。
また、車両制御装置105の記憶部512に記憶されている作業状況テーブル512Cの「完了状態」の項目を参照することで、車両制御装置105側においても、作業中の状態であるか、作業が完了している状態であるかという作業状況を示す情報を検出することができる。
また、車両制御装置105の記憶部512に記憶されている作業状況テーブル512Cの「完了状態」の項目を参照することで、車両制御装置105側においても、作業中の状態であるか、作業が完了している状態であるかという作業状況を示す情報を検出することができる。
(有人運転と無人運転との切り替え処理)
図8は、管理装置300による運転者2の疲労の度合いにより有人運転と無人運転とを切り替える処理を示すフローチャートである。運転者2に装着された生体情報検出装置200が、運転者2の生体情報と、自装置の位置とを検出する。生体情報検出装置200は、検出した生体情報と自装置の位置の情報とを管理装置300に送信する。管理装置300の疲労度算出部306は、送受信部304を通じて生体情報検出装置200が出力する生体情報と、自装置の位置の情報とを受信する(ステップSb1)。これにより、位置特定部308は、運転者2の位置を特定する。
図8は、管理装置300による運転者2の疲労の度合いにより有人運転と無人運転とを切り替える処理を示すフローチャートである。運転者2に装着された生体情報検出装置200が、運転者2の生体情報と、自装置の位置とを検出する。生体情報検出装置200は、検出した生体情報と自装置の位置の情報とを管理装置300に送信する。管理装置300の疲労度算出部306は、送受信部304を通じて生体情報検出装置200が出力する生体情報と、自装置の位置の情報とを受信する(ステップSb1)。これにより、位置特定部308は、運転者2の位置を特定する。
疲労度算出部306は、受信した生体情報から疲労度の算出を行う。具体的には、疲労度算出部306は、受信した生体情報と、運転者テーブル301Cに記憶されている平常時生体情報とに基づいて疲労度を算出する。疲労度算出部306は、算出した値を疲労度を示す情報として疲労度判定部307に出力する(ステップSb2)。疲労度判定部307が疲労度算出部306からの疲労度を示す情報を受けると、運転状態判定部311は、作業計画情報記憶部301が記憶する車両テーブル301Bおよび運転者テーブル301Cを参照して、運転者2に対応するフォークリフト100の現在の運転状態が有人運転状態であるか無人運転状態であるかを判定する(ステップSb3)。具体的には、運転状態判定部311は、運転者テーブル301Cを参照して生体情報の送信元の生体情報検出装置200に対応するフォークリフト100を特定し、車両テーブル301Bを参照して当該フォークリフトの運転状態を特定する。
運転状態判定部311が有人運転状態であると判定した場合(ステップSb3:有人運転状態)、疲労度判定部307は、作業計画情報記憶部301の基準値テーブル301Dにおいて、生体情報の送信元の生体情報検出装置200の識別番号に関連付けられた第1の閾値を読み出す。疲労度判定部307は、疲労度算出部306が算出した疲労度が、第1の閾値以上であるか否かを判定する(ステップSb4)。
疲労度判定部307が、疲労度算出部306が算出した運転者2の疲労度が第1の閾値以上でないと判定した場合(ステップSb4:No)、ステップSb1からの処理が繰り返される。一方、疲労度判定部307が、疲労度算出部306が算出した運転者2の疲労度が第1の閾値以上であると判定した場合(ステップSb4:Yes)、当該判定結果を受けて指示生成部309は、運転者2に対応するフォークリフト100の作業が完了しているか否かを判定する(ステップSb5)。
指示生成部309は、作業計画情報記憶部301の車両テーブル301Bを参照して、当該フォークリフト100の識別番号に関連付けられた情報の「完了状態」の項目が「作業中」となっている場合、現在の作業は完了していないと判定する。現在の作業が完了していないと判定した場合(ステップSb5:No)、指示生成部309は、有人運転から無人運転への切り替えの予告を提示する提示指示を、送受信部304を介してフォークリフト100に送信して、ステップSb5の処理を繰り返す(ステップSb6)。これにより、運転者2に対応するフォークリフト100の車両制御装置105は、ディスプレイ114に、有人運転から無人運転への切り替えの予告を提示する。
一方、「完了状態」の項目が「完了」となっている場合(ステップSb5:Yes)、指示生成部309は、現在の作業が完了していると判定し、送受信部304を介してフォークリフト100に、有人運転から無人運転へ切り替える切替指示を送信する(ステップSb7)。そして、指示生成部309は、作業計画情報記憶部301の車両テーブル301Bの当該フォークリフト100の「運転状態」の項目を「無人運転」に書き換える(ステップSb8)とともに、ステップSb1の処理に戻る。
これによりフォークリフト100の車両制御装置105の運転切替スイッチ部504は、記憶部512の運転状態情報512Bを無人運転状態を示す情報に書き換える。運転状態情報512Bに記憶される情報の書き換えにより、ディスプレイ114に表示される運転状態も無人運転状態に変更される。また、運転切替スイッチ部504は、有人運転から無人運転への切り替えを行い、後述する図9の無人運転の処理を開始する。
一方、「完了状態」の項目が「完了」となっている場合(ステップSb5:Yes)、指示生成部309は、現在の作業が完了していると判定し、送受信部304を介してフォークリフト100に、有人運転から無人運転へ切り替える切替指示を送信する(ステップSb7)。そして、指示生成部309は、作業計画情報記憶部301の車両テーブル301Bの当該フォークリフト100の「運転状態」の項目を「無人運転」に書き換える(ステップSb8)とともに、ステップSb1の処理に戻る。
これによりフォークリフト100の車両制御装置105の運転切替スイッチ部504は、記憶部512の運転状態情報512Bを無人運転状態を示す情報に書き換える。運転状態情報512Bに記憶される情報の書き換えにより、ディスプレイ114に表示される運転状態も無人運転状態に変更される。また、運転切替スイッチ部504は、有人運転から無人運転への切り替えを行い、後述する図9の無人運転の処理を開始する。
一方、ステップSb3において、運転状態判定部311が無人運転状態であると判定した場合(ステップSb3:無人運転状態)、疲労度判定部307は、作業計画情報記憶部301の基準値テーブル301Dにおいて、生体情報の送信元の生体情報検出装置200の識別番号に関連付けられた第2の閾値を読み出す。なお、第1の閾値と第2の閾値とが同程度の値である場合、有人運転から無人運転に切り替わった後、運転者2の疲労が少し回復しただけで、すぐに、無人運転から有人運転に切り替わることになるため、第2の閾値は第1の閾値より充分に小さな値である必要がある。疲労度判定部307は、疲労度算出部306が算出した運転者2の疲労度が第2の閾値以下であるか否かを判定する(ステップSb9)。
疲労度判定部307が、疲労度算出部306が算出した運転者2の疲労度が、第2の閾値以下でないと判定した場合(ステップSb9:No)、ステップSb1からの処理が繰り返される。一方、疲労度判定部307が、疲労度算出部306が算出した運転者2の疲労度が第2の閾値以下であると判定した場合(ステップSb9:Yes)、指示生成部309は、位置特定部308が特定した運転者2の位置情報と、作業計画情報記憶部301が記憶する車両テーブル301Bとに基づいて、運転状態が無人運転であり、かつ作業が完了しているフォークリフト100のうち当該運転者2に最も近いものを特定する(ステップSb10)。なお、全てのフォークリフト100が作業中である場合、指示生成部309は、運転状態が無人運転であるフォークリフト100のうち当該運転者2に最も近いものを特定する。
フォークリフト100を特定すると、指示生成部309は、特定したフォークリフト100の作業と、運転者2に関連付けられたフォークリフト100の作業とを入れ替える(ステップSb11)。具体的には、指示生成部309は、作業計画情報記憶部301の作業計画情報テーブル301Aが記憶する「車両ID」の項目について、ステップSb10で特定されたフォークリフト100の識別番号と、運転者テーブル301Cにおいて運転者2に関連付けられたフォークリフト100の識別番号とを入れ替える。また指示生成部309は、運転者テーブル301Cにおいて、ステップSb10で特定されたフォークリフト100の識別番号と、運転者2に関連付けられているフォークリフト100の識別番号とを入れ替える。これにより、管理装置300は、疲労から回復した運転者2に最も近いフォークリフト100に、当該運転者2を搭乗させることができ、かつフォークリフト100間の作業の引き継ぎを行うことができる。
次に、指示生成部309は、送受信部304を介して、ステップSb10で特定されたフォークリフト100に、位置特定部308が特定した位置まで移動した後に無人運転から有人運転に切り替えることを指示する切替指示を出力する(ステップSb12)。当該切替指示は、移動指示の一例である。指示生成部309は、作業計画情報記憶部301の車両テーブル301Bの当該フォークリフト100の「運転状態」の項目を「有人運転」に書き換える(ステップSb13)。また、回復通知部310は、送受信部304を介して運転者2が所有する携帯端末210に、運転者2の疲労が回復した旨を示す回復通知を送信する(ステップSb14)。これにより、運転者2は、携帯端末210が受信した回復通知を認識することで、フォークリフト100に搭乗するタイミングを知ることができる。そして管理装置300は、ステップSb1の処理に戻る。
これによりフォークリフト100の車両制御装置105の運転切替スイッチ部504は、記憶部512の運転状態情報512Bを有人運転状態を示す情報に書き換える。運転状態情報512Bに記憶される情報の書き換えにより、ディスプレイ114に表示される運転状態も有人運転状態に変更される。
これによりフォークリフト100の車両制御装置105の運転切替スイッチ部504は、記憶部512の運転状態情報512Bを有人運転状態を示す情報に書き換える。運転状態情報512Bに記憶される情報の書き換えにより、ディスプレイ114に表示される運転状態も有人運転状態に変更される。
(無人運転の処理)
図9は、無人運転への切替指示を受信した際のフォークリフトの処理を示すフローチャートである。送受信部501が無人運転への切替指示を受信すると、搭乗判定部513は、フロアスイッチ118がオフ状態になっているか否かを判定する(ステップSc1)。フロアスイッチ118がオン状態である場合(ステップSc1:No)、自動運転制御部503を起動せずに、ステップSc1の処理を継続する。つまり、フォークリフト100は、無人運転への切替指示を受信してから運転者2が降車するまで、無人運転制御を開始しない。フロアスイッチ118がオフ状態になった場合(ステップSc1:Yes)、運転切替スイッチ部504は、自動運転制御部503を起動して、自動運転の処理を開始させる(ステップSc2)。運転切替スイッチ部504は、運転者2のリフトレバー106、チルトレバー107、リーチレバー108の操作による荷役制御部509の制御を停止し、荷役制御部509が、自動運転制御部503からの制御指示情報によって動作するように切り替える(ステップSc3)。運転切替スイッチ部504は、運転者2のアクセルレバー109、ブレーキペダル110、ステアリングハンドル111の操作による走行制御部508の制御を停止し、走行制御部508が、自動運転制御部503からの制御指示情報によって動作するように切り替える(ステップSc4)。
図9は、無人運転への切替指示を受信した際のフォークリフトの処理を示すフローチャートである。送受信部501が無人運転への切替指示を受信すると、搭乗判定部513は、フロアスイッチ118がオフ状態になっているか否かを判定する(ステップSc1)。フロアスイッチ118がオン状態である場合(ステップSc1:No)、自動運転制御部503を起動せずに、ステップSc1の処理を継続する。つまり、フォークリフト100は、無人運転への切替指示を受信してから運転者2が降車するまで、無人運転制御を開始しない。フロアスイッチ118がオフ状態になった場合(ステップSc1:Yes)、運転切替スイッチ部504は、自動運転制御部503を起動して、自動運転の処理を開始させる(ステップSc2)。運転切替スイッチ部504は、運転者2のリフトレバー106、チルトレバー107、リーチレバー108の操作による荷役制御部509の制御を停止し、荷役制御部509が、自動運転制御部503からの制御指示情報によって動作するように切り替える(ステップSc3)。運転切替スイッチ部504は、運転者2のアクセルレバー109、ブレーキペダル110、ステアリングハンドル111の操作による走行制御部508の制御を停止し、走行制御部508が、自動運転制御部503からの制御指示情報によって動作するように切り替える(ステップSc4)。
自動運転制御部503は、運転切替スイッチ部504によって起動されると、運転切替スイッチ部504から無人運転停止指示情報を受けているか否かを判定する(ステップSc5)。運転切替スイッチ部504から無人運転停止指示情報を受けていないと判定した場合(ステップSc5:No)、自動運転制御部503は、送受信部501を通じて管理装置300の作業計画情報選択部302に作業特定情報を要求することを示す情報を送信する(ステップSc6)。
作業計画情報選択部302は、作業計画情報記憶部301の作業計画情報テーブル301Aの中から「完了状態」の項目が「未完了」の作業計画情報を読み出す。作業計画情報選択部302は、読みだした作業計画情報から荷置き位置を示す識別番号と、移送先位置を示す識別番号とを含む作業特定情報を選択して送受信部304を通じて自動運転制御部503に送信する。例えば、図6の例では、荷物IDが「002」のレコードの「完了状態」が「未完了」であるため、荷置き位置ID「204」と、移送先位置ID「340」を読み出して送信する。
自動運転制御部503は、送受信部501を通じて、作業特定情報を受信する(ステップSc7)。自動運転制御部503は、受信した作業特定情報に基づいて、走行制御部508を動作させて、作業特定情報に示される荷置き位置にフォークリフト100を進ませて、荷役制御部509を動作させて、荷物を持ち上げ、作業特定情報に示される移送先の位置まで当該荷物を運んで荷下しを行う(ステップSc8)。自動運転制御部503は、ステップSc5からの処理を繰り返す。
ステップSc5において、運転切替スイッチ部504から無人運転停止指示情報を受けていると判定した場合(ステップSc5:Yes)、自動運転制御部503は、走行制御部508を動作させて、受信した切替指示に含まれる位置情報が示す位置までフォークリフト100を進ませる(ステップSc9)。次に、運転切替スイッチ部504は、自動運転制御部503を停止させる(ステップSc10)。運転切替スイッチ部504は、運転者2のリフトレバー106、チルトレバー107、リーチレバー108の操作による荷役制御部509の制御の受け付けを開始する(ステップSc11)。また運転切替スイッチ部504は、運転者2のアクセルレバー109、ブレーキペダル110、ステアリングハンドル111の操作による走行制御部508の制御を開始する(ステップSc12)。これにより、フォークリフト100は、運転者2がいる場所まで自動走行し、有人運転可能な状態で待機することができる。
なお、図7及び図9は、それぞれ車両制御装置105が備える各機能部が並列に行う処理である。
(緊急荷役作業の発生時の処理)
図10は、管理装置300による緊急荷役作業の発生時の処理を示すフローチャートである。管理者が、管理装置300に緊急荷役作業の情報を入力すると、管理装置300の緊急荷役作業入力部312は、緊急荷役作業の情報を受け付ける(ステップSd1)。緊急荷役作業の情報を受け付けると、運転状態判定部311は、車両テーブル301Bを参照し、複数のフォークリフト100のうち、運転状態が有人運転状態であるものがあるか否かを判定する(ステップSd2)。これは、複数の運転者2それぞれについて、運転者2が休憩しているか否かを判定することと等価である。有人運転状態のフォークリフト100がある場合(ステップSd2:Yes)、送受信部304は、有人運転状態のフォークリフト100の運転者2に、緊急荷役作業の発生を通知する(ステップSd3)。具体的には、送受信部304は、車両テーブル301Bにおいて「運転状態」として「有人運転」が記録されているフォークリフト100の車両IDを1つ特定し、運転者テーブル301Cを参照して当該車両IDに関連付けられた端末IDを特定し、当該端末IDが示す携帯端末210に、緊急荷役作業の発生を示す情報を送信する。
図10は、管理装置300による緊急荷役作業の発生時の処理を示すフローチャートである。管理者が、管理装置300に緊急荷役作業の情報を入力すると、管理装置300の緊急荷役作業入力部312は、緊急荷役作業の情報を受け付ける(ステップSd1)。緊急荷役作業の情報を受け付けると、運転状態判定部311は、車両テーブル301Bを参照し、複数のフォークリフト100のうち、運転状態が有人運転状態であるものがあるか否かを判定する(ステップSd2)。これは、複数の運転者2それぞれについて、運転者2が休憩しているか否かを判定することと等価である。有人運転状態のフォークリフト100がある場合(ステップSd2:Yes)、送受信部304は、有人運転状態のフォークリフト100の運転者2に、緊急荷役作業の発生を通知する(ステップSd3)。具体的には、送受信部304は、車両テーブル301Bにおいて「運転状態」として「有人運転」が記録されているフォークリフト100の車両IDを1つ特定し、運転者テーブル301Cを参照して当該車両IDに関連付けられた端末IDを特定し、当該端末IDが示す携帯端末210に、緊急荷役作業の発生を示す情報を送信する。
他方、有人運転状態のフォークリフト100がない場合(ステップSd2:No)、疲労度判定部307は、運転者テーブル301Cが記憶する休憩中断回数のうち最も回数が多いものを、緊急荷役作業を実行させる作業者を特定するための回数閾値に設定する(ステップSd4)。次に、疲労度判定部307は、作業計画情報記憶部301が記憶する基準値テーブル301Dの「第2の閾値」を、当該「第2の閾値」に所定値を加算した値に書き換える。これにより各運転者2の第2の閾値が引き上げられる(ステップSd5)。
次に、疲労度算出部306は、送受信部304を通じて各運転者2の生体情報検出装置200から生体情報を受信する(ステップSd6)。疲労度算出部306は、受信した生体情報と運転者テーブル301Cの平常時生体情報とに基づいて、各運転者2の疲労度の算出を行う。疲労度算出部306は、算出した疲労度を疲労度判定部307に出力する(ステップSd7)。疲労度判定部307が疲労度算出部306からの疲労度を示す情報を受けると、運転状態判定部311は、休憩中断回数がステップSd4で算出した回数閾値未満の運転者のうち、疲労度が第2閾値以下の運転者が1人以上いるか否かを判定する(ステップSd8)。具体的には、運転状態判定部311は、以下の手順で疲労度が第2閾値以下の運転者の有無を判定する。
疲労度判定部307は、運転者テーブル301Cを参照し、全ての運転者2の中から、休憩中断回数がステップSd4で算出した回数閾値未満の運転者2を抽出する。疲労度判定部307は、基準値テーブル301Dを参照し、抽出された運転者2のうち疲労度が第2閾値以下の運転者が1人以上いるか否かを判定する。
疲労度判定部307は、疲労度が第2閾値以下の運転者がいないと判定した場合(ステップSd8:No)、ステップSd5に処理を戻し、第2の閾値の引き上げを行う。つまり、疲労度判定部307は、複数の運転者2のうち少なくとも1人の疲労度より高くなるまで第2の閾値を引き上げる。
疲労度判定部307は、運転者テーブル301Cを参照し、全ての運転者2の中から、休憩中断回数がステップSd4で算出した回数閾値未満の運転者2を抽出する。疲労度判定部307は、基準値テーブル301Dを参照し、抽出された運転者2のうち疲労度が第2閾値以下の運転者が1人以上いるか否かを判定する。
疲労度判定部307は、疲労度が第2閾値以下の運転者がいないと判定した場合(ステップSd8:No)、ステップSd5に処理を戻し、第2の閾値の引き上げを行う。つまり、疲労度判定部307は、複数の運転者2のうち少なくとも1人の疲労度より高くなるまで第2の閾値を引き上げる。
他方、疲労度判定部307は、疲労度が第2閾値以下の運転者がいると判定した場合(ステップSd8:Yes)、該当する運転者2を1人特定し、運転者テーブル301Cが記憶する当該運転者の休憩中断回数に1を加算する(ステップSd9)。また、疲労度判定部307は、作業計画情報記憶部301が記憶する基準値テーブル301Dのうち、ステップSd9で特定した運転者2以外の他の運転者に係る「第2の閾値」を元の値に戻す。これにより他の運転者2の第2の閾値が引き下げられる(ステップSd10)。次に、運転状態判定部311は、車両テーブル301Bを参照し、複数のフォークリフト100のうち、運転状態が有人運転状態であるものがあるか否かを判定する(ステップSd11)。これにより、運転状態判定部311は、ステップSd5における第2の閾値の引き上げによって、図8のステップSb9において疲労度が第2の閾値以下であるとの判定がなされ、運転者2が休憩を終了したことを検知することができる。
有人運転状態のフォークリフト100がない場合(ステップSd11:No)、ステップSd11の判定を繰り返し実行する。他方、有人運転状態のフォークリフト100がある場合(ステップSd11:Yes)、疲労度判定部307は、作業計画情報記憶部301が記憶する基準値テーブル301Dのうち、ステップS9で特定された運転者2に係る「第2の閾値」を元の値に戻す。これにより特定された運転者2の第2の閾値が引き下げられる(ステップSd12)。そして、管理装置300は、処理をステップSd3に移し、有人運転状態のフォークリフト100の運転者2に、緊急荷役作業の発生を通知する。これは、疲労度がステップSd5で引き揚げられた第2の閾値以下の運転者2に、休憩の終了を通知することと等価である。
上記の実施形態の構成により、管理装置300は、全ての運転者2が休憩しており、かつ緊急荷役作業が発生した場合に、複数の運転者2のうち最も疲労度が低い運転者2に、休憩の終了を通知する。これにより、全ての運転者2が休憩している場合であっても、最も疲労度が小さい運転者に、発生した緊急荷役作業をさせることが可能となる。また、管理装置300は、休憩中断回数が回数閾値未満である運転者2を、緊急荷役作業を実行させる候補とする。これにより、緊急荷役作業のために休憩を中断する対象が特定の運転者2に偏ることを防ぐことができる。
なお、上記の実施形態では、複数の運転者2のうち少なくとも1人の疲労度より高くなるまで第2の閾値を引き上げることで、最も疲労度が小さい運転者2の休憩を終了させるが、本発明の実施の形態は当該構成に限られない。例えば、ステップSd2において有人運転の車両がないと判定される場合に、疲労度算出部306が疲労度を算出し、最も小さい疲労度に係る運転者2を特定し、当該運転者2の休憩を終了させてもよい。
また、上記の実施形態では、1人の運転者2に緊急荷役作業を実行させるが、本発明の実施の形態は当該構成に限られない。例えば、他の実施形態では、複数人の運転者2に緊急荷役作業を実行させてもよい。この場合、ステップSd8の判定においては、疲労度が第2の閾値以下の運転者が緊急荷役作業に必要な人数だけいるか否かを判定する必要がある。また、上述のように最も小さい疲労度に係る運転者2を特定して、当該運転者2の休憩を終了させる場合には、疲労度が小さい順に緊急荷役作業に必要な人数の運転者2を特定する必要がある。
また、上記の実施形態では、休憩中断回数が回数閾値未満である運転者2を、緊急荷役作業を実行させる候補とすることで、緊急荷役作業のために休憩を中断する対象が特定の運転者2に偏ることを防いでいるが、本発明の実施の形態は当該構成に限られない。例えば、他の実施形態では、ステップSd8の判定対象となる運転者2を、休憩中断回数が回数閾値未満である運転者2ではなく、全ての運転者2としてもよい。
また、上記の実施形態では、運転者2は、フォークリフト100から降りて休憩するように構成しているが、本発明の構成は、当該実施の形態に限られず、運転者2が、フォークリフト100に搭乗したまま休憩を取得するようにしてもよい。この場合、フォークリフト100の運転者2が変わることがないため、図8におけるステップSb12、Sb13の処理や図9のステップSc1、Sc9の処理はなくてもよい。また、運転者2が搭乗したまま休憩を行う場合、運転者2の携帯端末装置210が、作業復帰指示部310から運転者2の疲労が回復した旨の通知を受信した場合、例えば、運転切替スイッチ部504が外部から操作できるように構成しておき、運転者2が手動で無人運転から有人運転に切り替えるようにしてもよい。この場合、ステップSb14の処理も必要でなくなり、運転者2の操作を受けて有人運転に切り替えられた運転切替スイッチ部504が、無人走行停止指示情報を自動運転制御部503に出力することになる。
また、上記の実施形態では、フォークリフト100が有人運転と無人運転とを切り替え可能に構成しているが、本発明の構成は、当該実施の形態に限られない。例えば、フォークリフト100が無人運転機能を有しない場合、運転者2の休憩中、当該運転者2が搭乗するフォークリフト100を停止させておいてもよい。
また、上記の実施形態では、荷役車両システム1において、管理装置300を備える構成としているが、本発明の構成は、当該実施の形態に限られない。生体情報検出装置200と、フォークリフト100と、位置マーク400を備え、管理装置300を備えない構成としてもよい。この場合、生体情報検出装置200または携帯端末210が、送受信部304、疲労度算出部306、疲労度判定部307、位置特定部308、指示生成部309、回復通知部310に相当する構成を備えるようにする。これにより、管理装置300がなくても、生体情報検出装置200または携帯端末210がフォークリフト100に切替指示、移動指示を送信することができる。またこの場合、フォークリフト100の車両制御装置105ごとの作業計画情報を記憶した作業計画情報テーブル301Aを記憶部512に記憶させ、車両制御装置105が、作業済情報書込部303、作業計画情報選択部302を備えるようにする。これにより、フォークリフト100は、記憶部512に記憶されている作業計画情報に基づいて無人運転において作業を継続することができる。
また、上記の実施形態では、運転者2の疲労が回復したときに、無人運転中のフォークリフト100のうち当該運転者2に最も近いものを有人運転に切り替える構成としているが、本発明の構成は、当該実施の形態に限られない。例えば、運転者2とフォークリフト100とが予め一対一に対応するように設定される場合、管理装置300は、運転者テーブル301Cにおいて疲労が回復した運転者2に関連付けられたフォークリフト100に切替指示を送信してもよい。この場合、管理装置300は、ステップSb11による作業の入れ替え処理を行う必要がない。また例えば、管理装置300は、無人運転中のフォークリフト100の中からランダムに選択されたものに切替指示を送信してもよい。
また、上記の実施形態では、フォークリフト100のカメラ113が、位置マーク400を撮影し、撮影によって得られた画像を位置検出部511が解析して、位置を示す情報を出力するようにしているが、本発明の構成は、当該実施の形態に限られない。位置マーク400や、カメラ113を備えず、GPS(Global Positioning System)の装置を車両制御装置105に備えておき、当該GPSから位置を示す情報を位置検出部511が取得するようにしてもよい。また、フォークリフト100がカメラ113に代えて磁気センサを備え、走行経路上には誘導ラインおよび位置マーク400に代えて発磁体が設けられてもよい。この場合、位置検出部511は、磁気センサが発磁体から検出した信号を解析して、位置を示す情報を出力する。
また、上記の実施形態では、車両制御装置105の記憶部512が作業状況テーブル512Cを記憶しており、作業状況管理部502が、作業の進行に応じて、「完了状態」の項目を「作業中」から「完了」に書き換える。運転切替スイッチ部504は、この「完了状態」の項目を参照して、ステップSb5において、現在の作業が完了しているか否かを判定しているが、本発明の構成は当該実施の形態に限られない。
例えば、荷重センサ112が出力する重量値に基づいて荷物が積載されているか否かを出力する積載検出部510の出力情報を作業状況管理部502が取得して、荷物を積載している場合、「作業中」を示している作業状況を示す情報として出力し、荷物が積載されていない場合、「完了」を示している作業状況を示す情報として出力し、運転切替スイッチ部504が、当該作業状況を示す情報に基づいて、有人運転から無人運転に切り替えるようにしてもよい。
また、荷役制御部509が出力するリフト制御の種類であるリフトアップとリフトダウンを示す情報を作業状況管理部502が取得して作業状況を示す情報とし、リフトアップした場合、「作業中」を示しているものとして出力し、リフトダウンした場合、「完了」を示しているものとして出力し、運転切替スイッチ部504が、当該作業状況を示す情報に基づいて、有人運転から無人運転に切り替えるようにしてもよい。
また、図7の処理において、リフトアップしながら走行する場合や、リフトダウンしながら走行するような場合が想定される場合、ステップSa2の走行状態の判定をしない構成であってもよい。
例えば、荷重センサ112が出力する重量値に基づいて荷物が積載されているか否かを出力する積載検出部510の出力情報を作業状況管理部502が取得して、荷物を積載している場合、「作業中」を示している作業状況を示す情報として出力し、荷物が積載されていない場合、「完了」を示している作業状況を示す情報として出力し、運転切替スイッチ部504が、当該作業状況を示す情報に基づいて、有人運転から無人運転に切り替えるようにしてもよい。
また、荷役制御部509が出力するリフト制御の種類であるリフトアップとリフトダウンを示す情報を作業状況管理部502が取得して作業状況を示す情報とし、リフトアップした場合、「作業中」を示しているものとして出力し、リフトダウンした場合、「完了」を示しているものとして出力し、運転切替スイッチ部504が、当該作業状況を示す情報に基づいて、有人運転から無人運転に切り替えるようにしてもよい。
また、図7の処理において、リフトアップしながら走行する場合や、リフトダウンしながら走行するような場合が想定される場合、ステップSa2の走行状態の判定をしない構成であってもよい。
また、上記の実施形態では、生体情報に基づく疲労度の算出を管理装置300の疲労度算出部306が算出しているが、本発明の構成は、当該実施の形態に限られず、生体情報検出装置200が、疲労度算出部306を備え、生体情報検出装置200において疲労度を算出するようにしてもよい。また、疲労度算出部306を備えず、生体情報検出装置200が検出する生体情報をそのまま疲労度を示す情報として、運転者2が疲労しているか否かを判定するようにしてもよい。
また、上記の実施形態では、図8のステップSb4とステップSb9において用いられる、第1の所定値と第2の所定値とを異なる値とし、第1の閾値と第2の閾値が異なる値となるようにしているが、本発明の構成は、当該実施の形態に限られず、第1の所定値と第2の所定値が同じ値であってもよい。
また、上記の実施形態では、図8のステップSb4における運転者2が疲労しているか否かの判定に用いられる第1の閾値と、ステップSb9における運転者2が疲労から回復しているか否かの判定に用いられる第2の閾値として、第1の閾値を第2の閾値よりも大きな値とすることで、運転者2が疲労から充分回復してから無人運転から有人運転に切り替える構成としているが、本発明の構成は、当該実施の形態に限られない。例えば、疲労度として、疲労の高まりとともに値が小さくなる生体情報を適用するような場合、第2の閾値を第1の閾値よりも大きな値として定めておく必要がある。
また、上記の実施形態において、図8のステップSb15において、例えば、運転切替スイッチ部504が、無人運転から有人運転に切り替わった際に、無人運転状態で行われた作業を作業状況テーブル512Cに記憶されている情報に基づいてディスプレイ114に出力するようにしてもよい。
ディスプレイ114に無人運転状態で行われた作業を表示する構成は、例えば、以下のような構成で実現することができる。記憶部512の作業状況テーブル512Cにおいて、「運転状態」の項目を更に設けて、作業状況管理部502が、有人運転状態で行われた作業であるか、または、無人運転状態で行われた作業であるかを示す情報を、レコードを生成する際、または、「完了状態」の項目に「完了」を書き込む際に、運転状態情報512Bを参照して書き込むようにしておく。そして、運転切替スイッチ部504は、無人運転から有人運転に切り替えた場合に、「運転状態」の項目が無人運転状態を示しているレコードを作業状況テーブル512Cから選択してディスプレイ114に出力する。
このような構成にすることにより、無人運転状態の間、運転者2が運転席117に乗車していない場合、有人運転に変わった際に、無人運転状態の間に行われた作業を確認することができる。
ディスプレイ114に無人運転状態で行われた作業を表示する構成は、例えば、以下のような構成で実現することができる。記憶部512の作業状況テーブル512Cにおいて、「運転状態」の項目を更に設けて、作業状況管理部502が、有人運転状態で行われた作業であるか、または、無人運転状態で行われた作業であるかを示す情報を、レコードを生成する際、または、「完了状態」の項目に「完了」を書き込む際に、運転状態情報512Bを参照して書き込むようにしておく。そして、運転切替スイッチ部504は、無人運転から有人運転に切り替えた場合に、「運転状態」の項目が無人運転状態を示しているレコードを作業状況テーブル512Cから選択してディスプレイ114に出力する。
このような構成にすることにより、無人運転状態の間、運転者2が運転席117に乗車していない場合、有人運転に変わった際に、無人運転状態の間に行われた作業を確認することができる。
また、上記の実施形態において、図9の無人運転の処理において、ステップSc6において自動運転制御部503が、作業特定情報を管理装置300に要求して、作業特定情報を管理装置300から受信するようにしているが、本発明の構成は、当該実施の形態に限られない。例えば、無人運転状態であるか有人運転状態であるかに関わらず、管理装置300の作業計画情報選択部302が、作業済情報書込部303が「完了状態」の項目に「完了」を書き込むごとに、「完了状態」の項目が「未完了」となっている作業計画情報を読み出し、読みだした作業計画情報に含まれる作業特定情報を車両制御装置105に送信する。車両制御装置105では、当該作業特定情報を受信すると、ディスプレイ114に表示して、有人運転状態の場合、運転者2がディスプレイ114に表示される作業特定情報を参照して作業を行う。このように、管理装置300から継続して作業特定情報が送信される構成にした場合、無人運転状態において、ステップSc6のような作業特定情報の要求の処理を行わなくてもよい。
また、上記の実施形態では、図8のステップSb4の判定において、第1の閾値以上であるか否かに基づいて判定を行っており、ステップSb9の判定において、第2の閾値以下であるか否かに基づいて判定を行っているが、本発明の構成は、当該実施の形態に限られない。これらの判定手法は、一例であり、例えば、ステップSb4において、第1の閾値を超えているか否かに基づいて判定を行ってもよいし、ステップSb9の判定において、第2の閾値未満であるか否かに基づいて判定を行ってもよい。
上述した実施形態における管理装置300はコンピュータで実現される。その場合、この機能を実現するためのプログラムをコンピュータ読み取り可能な記録媒体に記録して、この記録媒体に記録されたプログラムをコンピュータシステムに読み込ませ、実行することによって実現してもよい。なお、ここでいう「コンピュータシステム」とは、OSや周辺機器等のハードウェアを含むものとする。また、「コンピュータ読み取り可能な記録媒体」とは、フレキシブルディスク、光磁気ディスク、ROM、CD−ROM等の可搬媒体、コンピュータシステムに内蔵されるハードディスク等の記憶装置のことをいう。さらに「コンピュータ読み取り可能な記録媒体」とは、インターネット等のネットワークや電話回線等の通信回線を介してプログラムを送信する場合の通信線のように、短時間の間、動的にプログラムを保持するもの、その場合のサーバやクライアントとなるコンピュータシステム内部の揮発性メモリのように、一定時間プログラムを保持しているものも含んでもよい。また上記プログラムは、前述した機能の一部を実現するためのものであってもよく、さらに前述した機能をコンピュータシステムにすでに記録されているプログラムとの組み合わせで実現できるものであってもよく、FPGA(Field Programmable Gate Array)等のプログラマブルロジックデバイスを用いて実現されるものであってもよい。
以上、この発明の実施形態について図面を参照して詳述してきたが、具体的な構成はこの実施形態に限られるものではなく、この発明の要旨を逸脱しない範囲の設計等も含まれる。
1 荷役車両システム
2 運転者
100 フォークリフト
105 車両制御装置
106 リフトレバー
107 チルトレバー
108 リーチレバー
109 アクセルレバー
110 ブレーキペダル
111 ステアリングハンドル
112 荷重センサ
113 カメラ
114 ディスプレイ
118 フロアスイッチ
200 生体情報検出装置
300 管理装置
301 作業計画情報記憶部
302 作業計画情報選択部
303 作業済情報書込部
304 送受信部
305 車両状態書込部
306 疲労度算出部
307 疲労度判定部
308 位置特定部
309 指示生成部
310 回復通知部
311 運転状態判定部
312 緊急荷役作業入力部
400 位置マーク
501 送受信部
502 作業状況管理部
503 自動運転制御部
504 運転切替スイッチ部
508 走行制御部
509 荷役制御部
510 積載検出部
511 位置検出部
512 記憶部
513 搭乗判定部
2 運転者
100 フォークリフト
105 車両制御装置
106 リフトレバー
107 チルトレバー
108 リーチレバー
109 アクセルレバー
110 ブレーキペダル
111 ステアリングハンドル
112 荷重センサ
113 カメラ
114 ディスプレイ
118 フロアスイッチ
200 生体情報検出装置
300 管理装置
301 作業計画情報記憶部
302 作業計画情報選択部
303 作業済情報書込部
304 送受信部
305 車両状態書込部
306 疲労度算出部
307 疲労度判定部
308 位置特定部
309 指示生成部
310 回復通知部
311 運転状態判定部
312 緊急荷役作業入力部
400 位置マーク
501 送受信部
502 作業状況管理部
503 自動運転制御部
504 運転切替スイッチ部
508 走行制御部
509 荷役制御部
510 積載検出部
511 位置検出部
512 記憶部
513 搭乗判定部
Claims (6)
- 複数の運転者それぞれによって操作される複数の荷役車両と、前記複数の荷役車両を管理する管理装置と、を備える荷役車両システムであって、
前記管理装置は、
前記複数の運転者それぞれについて、当該運転者が休憩しているか否かを判定する休憩判定部と、
前記休憩判定部により休憩していると判定された前記運転者のうち、疲労度が所定の閾値以下である運転者に、休憩の終了を通知する通知部と、
緊急荷役作業の入力を受け付ける緊急荷役作業入力部と、
無人運転の運転状態と有人運転の運転状態とを切り替える運転切替スイッチ部と、
を備え、
前記通知部は、前記休憩判定部が全ての前記運転者が休憩していると判定し、かつ前記緊急荷役作業の入力があった場合に、前記複数の運転者のうち最も疲労度が低い運転者に、休憩の終了を通知し、
前記運転切替スイッチ部は、前記無人運転の運転状態から前記有人運転の運転状態へと切り替える
ことを特徴とする荷役車両システム。 - 前記通知部は、前記休憩判定部が全ての前記運転者が休憩していると判定し、かつ前記緊急荷役作業の入力があった場合に、前記複数の運転者のうち少なくとも1人の疲労度より高くなるまで閾値を引き上げる
ことを特徴とする請求項1に記載の荷役車両システム。 - 前記通知部は、前記休憩判定部が全ての前記運転者が休憩していると判定し、かつ前記緊急荷役作業の入力があった場合に、前記休憩の終了を通知する対象を、前記複数の運転者のうち最も疲労度が低い運転者から、前記緊急荷役作業のために休憩を中断した回数が所定数未満の運転者のうち最も疲労度が低い運転者へと換えた
ことを特徴とする請求項1または請求項2に記載の荷役車両システム。 - 前記管理装置は、前記通知部が休憩の終了を通知する運転者が搭乗する前記荷役車両に対して無人運転から有人運転への切り替えを指示する有人走行指示情報を送信する切替指示部を備え、
前記複数の荷役車両それぞれは、前記有人走行指示情報を前記管理装置から受信した場合に、運転状態を前記無人運転から前記有人運転に切り替える運転切替スイッチ部を備える
ことを特徴とする請求項1から請求項3の何れか1項に記載の荷役車両システム。 - 複数の荷役車両それぞれに搭乗する複数の運転者の休憩管理方法であって、
管理装置が、前記複数の運転者それぞれについて、当該運転者が休憩しているか否かを判定し、
前記管理装置が、緊急荷役作業の入力を受け付け、
前記管理装置が、無人運転の運転状態と有人運転の運転状態とを切り替え、
前記管理装置が、全ての前記運転者が休憩していると判定し、かつ前記緊急荷役作業の入力があった場合に、前記複数の運転者のうち最も疲労度が低い運転者に、休憩の終了を通知し、無人運転の運転状態と有人運転の運転状態とを切り替える
ことを特徴とする休憩管理方法。 - 複数の運転者それぞれによって操作される複数の荷役車両を管理する管理装置のコンピュータに、
前記複数の運転者それぞれについて、当該運転者が休憩しているか否かを判定する手順、
緊急荷役作業の入力を受け付ける手順、
無人運転の運転状態と有人運転の運転状態とを切り替える手順、
前記管理装置が、全ての前記運転者が休憩していると判定し、かつ前記緊急荷役作業の入力があった場合に、前記複数の運転者のうち最も疲労度が低い運転者に、休憩の終了を通知し、無人運転の運転状態と有人運転の運転状態とを切り替える手順
を実行させるための管理装置の制御プログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016094716A JP6232467B2 (ja) | 2016-05-10 | 2016-05-10 | 荷役車両システム、休憩管理方法及び制御プログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016094716A JP6232467B2 (ja) | 2016-05-10 | 2016-05-10 | 荷役車両システム、休憩管理方法及び制御プログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP6232467B2 true JP6232467B2 (ja) | 2017-11-15 |
| JP2017202899A JP2017202899A (ja) | 2017-11-16 |
Family
ID=60321148
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016094716A Active JP6232467B2 (ja) | 2016-05-10 | 2016-05-10 | 荷役車両システム、休憩管理方法及び制御プログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6232467B2 (ja) |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5400442B2 (ja) * | 2009-03-24 | 2014-01-29 | 本田技研工業株式会社 | 作業用車輌 |
| JP2013147301A (ja) * | 2012-01-17 | 2013-08-01 | Hitachi Plant Technologies Ltd | フォークリフト及びフォークリフトの運行管理システム |
| JP6006510B2 (ja) * | 2012-03-13 | 2016-10-12 | 中国電力株式会社 | 疲労度管理システム |
| JP6150258B2 (ja) * | 2014-01-15 | 2017-06-21 | みこらった株式会社 | 自動運転車 |
-
2016
- 2016-05-10 JP JP2016094716A patent/JP6232467B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017202899A (ja) | 2017-11-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6087455B1 (ja) | 荷役車両呼出装置、荷役車両システム、荷役車両呼出方法及び荷役車両呼出装置の制御プログラム | |
| JP6046290B1 (ja) | 荷役車両呼出装置、荷役車両システム、荷役車両呼出方法及び荷役車両呼出装置の制御プログラム | |
| JP6144801B1 (ja) | 荷役車両システム、荷役車両の管理方法、及び荷役車両管理プログラム | |
| JP6076525B1 (ja) | 荷役車両呼出装置、荷役車両システム、荷役車両呼出方法及び荷役車両呼出装置の制御プログラム | |
| JP6317393B2 (ja) | 荷役車両、荷役車両システム、荷役車両の制御方法、荷役車両システムの制御方法及びプログラム | |
| JP6267305B1 (ja) | 管理装置、制御方法及びプログラム | |
| JP6255613B2 (ja) | 荷役車両呼出装置、荷役車両システム、荷役車両呼出方法及び荷役車両呼出装置の制御プログラム | |
| JP6306623B2 (ja) | 荷役車両、荷役車両システム、制御方法及びプログラム | |
| JP6262826B1 (ja) | 管理装置、制御方法及びプログラム | |
| JP6231639B1 (ja) | 荷役車両呼出装置、荷役車両システム、制御方法及び制御プログラム | |
| JP6297651B1 (ja) | 管理装置、荷役車両システム、管理方法及びプログラム | |
| JP6204531B1 (ja) | 荷役車両システム、休憩管理方法及び制御プログラム | |
| JP6232467B2 (ja) | 荷役車両システム、休憩管理方法及び制御プログラム | |
| JP6208836B1 (ja) | 荷役車両システム、休憩管理方法及び制御プログラム | |
| JP6182630B1 (ja) | 荷役車両、荷役車両システム、荷役車両の制御方法、荷役車両システムの制御方法及びプログラム | |
| JP6231638B1 (ja) | 荷役車両呼出装置、荷役車両システム、制御方法及び制御プログラム | |
| JP6259500B1 (ja) | 荷役車両呼出装置、荷役車両システム、荷役車両呼出方法及び荷役車両呼出装置の制御プログラム | |
| JP6259479B2 (ja) | 荷役車両、荷役車両システム、制御方法及びプログラム | |
| JP6053085B1 (ja) | 荷役車両呼出装置、荷役車両システム、荷役車両呼出方法及び荷役車両呼出装置の制御プログラム | |
| JP6307103B2 (ja) | 荷役車両、荷役車両システム、荷役車両の制御方法、荷役車両システムの制御方法及び荷役車両の制御プログラム | |
| JP6231637B1 (ja) | 荷役車両呼出装置、荷役車両システム、制御方法及び制御プログラム | |
| JP6257694B2 (ja) | 荷役車両システム、荷役車両の管理方法、及び荷役車両管理プログラム | |
| JP6290345B1 (ja) | 管理装置、荷役車両システム、制御方法及びプログラム | |
| JP6208835B1 (ja) | 管理装置、荷役車両システム、制御方法及びプログラム | |
| JP6297650B1 (ja) | 管理装置、荷役車両システム、制御方法及びプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20171010 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20171023 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6232467 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |