JP6230316B2 - 像振れ補正装置及びその制御方法、並びにプログラム - Google Patents
像振れ補正装置及びその制御方法、並びにプログラム Download PDFInfo
- Publication number
- JP6230316B2 JP6230316B2 JP2013153830A JP2013153830A JP6230316B2 JP 6230316 B2 JP6230316 B2 JP 6230316B2 JP 2013153830 A JP2013153830 A JP 2013153830A JP 2013153830 A JP2013153830 A JP 2013153830A JP 6230316 B2 JP6230316 B2 JP 6230316B2
- Authority
- JP
- Japan
- Prior art keywords
- shake
- offset
- correction amount
- shake correction
- amount
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Landscapes
- Adjustment Of Camera Lenses (AREA)
- Studio Devices (AREA)
Description
まず角度算出のフィルタについて説明する。防振システムに用いられる角度算出フィルタは、積分器(式(1)の左辺第1項)とHPF(式(1)の左辺第2項)を組み合わせたフィルタ(式(1)の右辺)を一般的に用いる。このフィルタは時定数Tのローパスフィルタ(LPF)に時定数Tを乗算したものと同じ式となる。

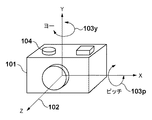
図1は、実施形態1における撮像装置101の模式図である。図2は、撮像装置101の撮像部の構成と、中央演算処理装置であるCPU105で実行される像振れ補正処理の機能ブロックを示す。
式(1)を用いて説明したように角度2算出部117では、時定数Tに設定したLPFにTを乗算することで角度信号が演算される。角度2算出部115で演算される信号のオフセットは、LPFのゲイン特性が0dBとなる低周波領域にTを乗算すればオフセットを求められる。角度2算出部117に入力される信号のオフセット量は、オフセット1算出部111で既に算出されている。したがって、オフセット1算出部111の出力にTを乗算すれば角度2算出部117を通過後のオフセット成分を演算することができる。
(1)角速度301からオフセット302を減算して得たオフセット除去後の角速度303。
(2)角度2算出部117の出力(制御周期の前回サンプリング値)からオフセット2算出部113より算出した角度オフセット307を減算して得たオフセット除去後の角度信号309。
(3)図3(g)(h)に示すゲイン算出テーブル。
オフセット除去後の角度信号がA1以下のとき、ゲインαは0となる。
オフセット除去後の角度信号がA2を超えたとき、ゲインαは1となる。すなわち、オフセット除去後の信号が所定閾値A2を超えたときに角速度減算量が算出され、所定閾値との差が大きいほど角速度減算量を大きくする。
オフセット除去後の角度信号がA1とA2の間に位置するとき、ゲインαはA1−A2間を線形補間した値となる。
図3(h)についても、同様の方法でゲインβを求める。横軸がオフセット除去後の角度信号、縦軸がゲインβである。
オフセット除去後の角度信号がB1以上のとき、ゲインαは0となる。
オフセット除去後の角度信号がB2以下のとき、ゲインβは1となる。
オフセット除去後の角度信号がB1とB2の間に位置するとき、ゲインβはB1−B2間を線形補間した値となる。
角速度がマイナス方向:角速度減算量 = オフセット減算後角速度 × β ・・・(4)
図3(c)の304は、オフセット減算後角速度303から、角速度減算量を減算した信号である。
図3(e)の305は、角速度301から、角速度減算量を減算した信号である。
図3(f)の306は、305を積分し、角度算出した信号である。
このように上記説明した制御によって、パンニングによる角速度成分をカットすることができ、パンニング直後にも防振制御の安定が速くなり適切な振れ補正を行うことができる。
図8は実施形態2に係る撮像装置101の撮像部の構成と、CPU105で実行される像振れ補正処理の機能ブロックを示す。実施形態1に係る図2と実施形態2に係る図8の違いは以下の通りである。
(1)図8には、図2のHPF109と、角度1算出部110がない。
(2)図2では、信号切り替え部118に角度1算出部110の出力が入力されていた。このかわりに、図8では、オフセット減算部114で角度2算出部の出力値から角速度オフセットが減算された信号が、信号切り替え部118に入力される。
・撮像素子を光軸に垂直な面内で移動させることで振れ補正を行う構成。
・撮像素子が出力する各撮影フレームの切り出し位置を変更することで振れの影響を軽減させる電子防振による構成。
・複数の防振制御を組み合わせて振れ補正を行う構成。
また、本発明は、以下の処理を実行することによっても実現される。即ち、上述した実施形態の機能を実現するソフトウェア(プログラム)を、ネットワーク又は各種記憶媒体を介してシステム又は装置に供給し、そのシステム又は装置のコンピュータ(またはCPUやMPU等)がプログラムを読み出して実行する処理である。この場合、そのプログラム、及び該プログラムを記憶した記憶媒体は本発明を構成することになる。
Claims (7)
- 撮像装置によって撮像される画像の画像振れを補正する像振れ補正装置であって、
撮像前の画像振れを補正する第1振れ補正量を演算する第1演算手段と、
撮像中の画像振れを補正する第2振れ補正量を演算する第2演算手段と、
を備え、
前記第1演算手段は、ハイパスフィルタを用いて前記第1振れ補正量を演算し、
前記第2演算手段は、
前記撮像装置の振れを検出する検出手段の出力の第1オフセット成分を算出する第1オフセット算出手段と、
前記検出手段の出力の第2オフセット成分を算出する第2オフセット算出手段と、
を含み、
前記検出手段の出力から前記第1オフセット成分を減算した信号と、前記第2振れ補正量から前記第2オフセット成分を減算した信号とに基づいて振れ減算量を算出する減算量算出手段を更に備え、
前記第2演算手段は、前記検出手段の出力から前記振れ減算量を減算した信号を積分することで前記第2振れ補正量を演算し、
前記第1振れ補正量又は前記第2振れ補正量に基づいて画像振れを補正する補正手段は、撮像前は、前記第1振れ補正量に基づいて画像振れを補正し、撮像中は、前記第2振れ補正量に基づいて画像振れを補正する
ことを特徴とする像振れ補正装置。 - 撮像装置によって撮像される画像の画像振れを補正する像振れ補正装置であって、
撮像前の画像振れを補正する第1振れ補正量を演算する第1演算手段と、
撮像中の画像振れを補正する第2振れ補正量を演算する第2演算手段と、
を備え、
前記第2演算手段は、
前記撮像装置の振れを検出する検出手段の出力の第1オフセット成分を算出する第1オフセット算出手段と、
前記検出手段の出力の第2オフセット成分を算出する第2オフセット算出手段と、
を含み、
前記検出手段の出力から前記第1オフセット成分を減算した信号と、前記第2振れ補正量から前記第2オフセット成分を減算した信号とに基づいて振れ減算量を算出する減算量算出手段を更に備え、
前記第2演算手段は、前記検出手段の出力から前記振れ減算量を減算した信号を積分することで前記第2振れ補正量を演算し、
前記第1演算手段は、前記第2振れ補正量から前記第2オフセット成分を減算した信号を前記第1振れ補正量とし、
前記第1振れ補正量又は前記第2振れ補正量に基づいて画像振れを補正する補正手段は、撮像前は、前記第1振れ補正量に基づいて画像振れを補正し、撮像中は、前記第2振れ補正量に基づいて画像振れを補正する
ことを特徴とする像振れ補正装置。 - 前記減算量算出手段は、前記第2振れ補正量から前記第2オフセット成分を減算した信号が所定閾値を超えたときに前記振れ減算量を算出し、前記信号と前記所定閾値との差が大きいほど、前記振れ減算量を大きくすることを特徴とする請求項1又は2に記載の像振れ補正装置。
- 前記検出手段は、前記撮像装置の振れの角速度を検出する角速度計を含み、
前記第1オフセット成分は、前記角速度計により検出された角速度のオフセット成分であり、前記第2オフセット成分は、前記第1オフセット成分に基づいて算出される前記撮像装置の振れの角度のオフセット成分である
ことを特徴とする請求項1乃至3のいずれか1項に記載の像振れ補正装置。 - 撮像装置によって撮像される画像の画像振れを補正する像振れ補正装置の制御方法であって、
第1演算手段が、撮像前の画像振れを補正する第1振れ補正量を演算する第1演算ステップと、
第2演算手段が、撮像中の画像振れを補正する第2振れ補正量を演算する第2演算ステップと、
を有し、
前記第1演算ステップにおいて、前記第1演算手段は、ハイパスフィルタを用いて前記第1振れ補正量を演算し、
前記第2演算ステップにおいて、前記第2演算手段は、
前記撮像装置の振れを検出する検出手段の出力の第1オフセット成分を算出するステップと、
前記検出手段の出力の第2オフセット成分を算出するステップと、
を含み、
減算量算出手段が、前記検出手段の出力から前記第1オフセット成分を減算した信号と、前記第2振れ補正量から前記第2オフセット成分を減算した信号とに基づいて振れ減算量を算出する減算量算出ステップを更に有し、
前記第2演算ステップにおいて、前記第2演算手段は、前記検出手段の出力から前記振れ減算量を減算した信号を積分することで前記第2振れ補正量を演算し、
補正手段が、撮像前は、前記第1振れ補正量に基づいて画像振れを補正し、撮像中は、前記第2振れ補正量に基づいて画像振れを補正する補正ステップを更に有する
ことを特徴とする像振れ補正装置の制御方法。 - 撮像装置によって撮像される画像の画像振れを補正する像振れ補正装置の制御方法であって、
第1演算手段が、撮像前の画像振れを補正する第1振れ補正量を演算する第1演算ステップと、
第2演算手段が、撮像中の画像振れを補正する第2振れ補正量を演算する第2演算ステップと、
を有し、
前記第2演算ステップにおいて、前記第2演算手段は、
前記撮像装置の振れを検出する検出手段の出力の第1オフセット成分を算出するステップと、
前記検出手段の出力の第2オフセット成分を算出するステップと、
を含み、
減算量算出手段が、前記検出手段の出力から前記第1オフセット成分を減算した信号と、前記第2振れ補正量から前記第2オフセット成分を減算した信号とに基づいて振れ減算量を算出する減算量算出ステップを更に有し、
前記第2演算ステップにおいて、前記第2演算手段は、前記検出手段の出力から前記振れ減算量を減算した信号を積分することで前記第2振れ補正量を演算し、
前記第1演算ステップにおいて、前記第1演算手段は、前記第2振れ補正量から前記第2オフセット成分を減算した信号を前記第1振れ補正量とし、
補正手段が、撮像前は、前記第1振れ補正量に基づいて画像振れを補正し、撮像中は、前記第2振れ補正量に基づいて画像振れを補正する補正ステップを更に有する
ことを特徴とする像振れ補正装置の制御方法。 - コンピュータに、請求項5又は6に記載の制御方法の各ステップを実行させるためのプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013153830A JP6230316B2 (ja) | 2013-07-24 | 2013-07-24 | 像振れ補正装置及びその制御方法、並びにプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013153830A JP6230316B2 (ja) | 2013-07-24 | 2013-07-24 | 像振れ補正装置及びその制御方法、並びにプログラム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2015025870A JP2015025870A (ja) | 2015-02-05 |
| JP2015025870A5 JP2015025870A5 (ja) | 2016-07-21 |
| JP6230316B2 true JP6230316B2 (ja) | 2017-11-15 |
Family
ID=52490591
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013153830A Expired - Fee Related JP6230316B2 (ja) | 2013-07-24 | 2013-07-24 | 像振れ補正装置及びその制御方法、並びにプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6230316B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116648665A (zh) * | 2020-12-25 | 2023-08-25 | 富士胶片株式会社 | 透镜装置、摄像装置、透镜装置的动作方法、摄像装置的动作方法及程序 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4861110B2 (ja) * | 2006-09-27 | 2012-01-25 | キヤノン株式会社 | 光学機器 |
| JP5178250B2 (ja) * | 2008-03-11 | 2013-04-10 | キヤノン株式会社 | 像ブレ補正装置およびそれを備える光学機器、撮像装置、像ブレ補正装置の制御方法 |
| JP5520071B2 (ja) * | 2010-02-05 | 2014-06-11 | キヤノン株式会社 | 像振れ補正装置および像振れ補正装置を備えた光学機器、撮像装置、像振れ補正装置の制御方法 |
-
2013
- 2013-07-24 JP JP2013153830A patent/JP6230316B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2015025870A (ja) | 2015-02-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6257207B2 (ja) | 像振れ補正装置およびその制御方法、レンズ鏡筒、並びに撮像装置 | |
| JP5269034B2 (ja) | 像振れ補正装置およびその制御方法、光学機器、撮像装置 | |
| JP6150655B2 (ja) | 像振れ補正装置およびその制御方法、レンズ鏡筒、光学機器、並びに撮像装置 | |
| US9883104B2 (en) | Control apparatus, image pickup apparatus, control method, and non-transitory computer-readable storage medium which are capable of performing tilt correction | |
| JP5409342B2 (ja) | 撮像装置及びその制御方法 | |
| US9170429B2 (en) | Optical apparatus and image capturing apparatus, and method of controlling the same and storage medium | |
| US9626743B2 (en) | Image stabilization apparatus, method of controlling the same, image capturing apparatus, lens apparatus, and storage medium | |
| US20160127649A1 (en) | Image blur correction apparatus and imaging apparatus | |
| JP2017092616A (ja) | 像ブレ補正装置及び方法 | |
| CN107040711B (zh) | 图像稳定设备及其控制方法 | |
| US11570361B2 (en) | Lens unit, imaging device, control methods thereof, and storage medium | |
| JP6642971B2 (ja) | 像ブレ補正装置、光学機器、撮像装置および制御方法 | |
| JP2012058545A (ja) | 撮像装置 | |
| JP2013210614A (ja) | 撮像装置 | |
| JP6024031B2 (ja) | ブレ補正装置及び光学機器 | |
| US10992867B2 (en) | Image capturing apparatus and control method thereof and storage medium | |
| JP6230316B2 (ja) | 像振れ補正装置及びその制御方法、並びにプログラム | |
| JP2014232235A (ja) | ブレ補正装置及び光学機器 | |
| JP6204805B2 (ja) | 撮像装置及びその制御方法、プログラム、記憶媒体 | |
| JP6268981B2 (ja) | ブレ補正装置、交換レンズ及びカメラ | |
| JP2019092037A (ja) | 撮像装置およびその制御方法 | |
| JP6541368B2 (ja) | 像ブレ補正装置、光学機器、撮像装置および制御方法 | |
| JP6299188B2 (ja) | ブレ補正装置、レンズ鏡筒及びカメラ | |
| US20210067698A1 (en) | Image stabilizing apparatus, optical apparatus having the same, and image stabilizing method | |
| JP6318502B2 (ja) | ブレ補正装置及び光学機器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160607 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160607 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170222 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170303 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170419 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170919 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20171017 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6230316 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |