JP6204692B2 - 位置測定装置および位置測定装置を駆動する方法 - Google Patents
位置測定装置および位置測定装置を駆動する方法 Download PDFInfo
- Publication number
- JP6204692B2 JP6204692B2 JP2013096737A JP2013096737A JP6204692B2 JP 6204692 B2 JP6204692 B2 JP 6204692B2 JP 2013096737 A JP2013096737 A JP 2013096737A JP 2013096737 A JP2013096737 A JP 2013096737A JP 6204692 B2 JP6204692 B2 JP 6204692B2
- Authority
- JP
- Japan
- Prior art keywords
- reference scale
- measuring device
- detection unit
- position measuring
- scanning detection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 26
- 238000001514 detection method Methods 0.000 claims description 138
- 238000005259 measurement Methods 0.000 claims description 86
- 230000008859 change Effects 0.000 claims description 35
- 238000012544 monitoring process Methods 0.000 claims description 27
- 230000006399 behavior Effects 0.000 claims description 8
- 238000011109 contamination Methods 0.000 description 14
- 230000010363 phase shift Effects 0.000 description 14
- 230000007423 decrease Effects 0.000 description 13
- 238000011156 evaluation Methods 0.000 description 10
- 230000000737 periodic effect Effects 0.000 description 10
- 230000006870 function Effects 0.000 description 8
- 230000007547 defect Effects 0.000 description 7
- 230000002950 deficient Effects 0.000 description 6
- 238000005286 illumination Methods 0.000 description 6
- 230000006866 deterioration Effects 0.000 description 5
- 230000000694 effects Effects 0.000 description 5
- 230000036961 partial effect Effects 0.000 description 5
- 238000010586 diagram Methods 0.000 description 4
- 230000009471 action Effects 0.000 description 3
- 239000000356 contaminant Substances 0.000 description 3
- 239000000428 dust Substances 0.000 description 3
- 230000032683 aging Effects 0.000 description 2
- 230000008901 benefit Effects 0.000 description 2
- 230000015572 biosynthetic process Effects 0.000 description 2
- 230000001010 compromised effect Effects 0.000 description 2
- 239000004020 conductor Substances 0.000 description 2
- 239000002245 particle Substances 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 238000007789 sealing Methods 0.000 description 2
- 230000003321 amplification Effects 0.000 description 1
- 230000003542 behavioural effect Effects 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 238000011835 investigation Methods 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 230000007774 longterm Effects 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000003199 nucleic acid amplification method Methods 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000010355 oscillation Effects 0.000 description 1
- 239000000843 powder Substances 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 239000013589 supplement Substances 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
- 230000037303 wrinkles Effects 0.000 description 1
Images

















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/26—Measuring arrangements characterised by the use of optical techniques for measuring angles or tapers; for testing the alignment of axes
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/244—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing characteristics of pulses or pulse trains; generating pulses or pulse trains
- G01D5/24457—Failure detection
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D3/00—Indicating or recording apparatus with provision for the special purposes referred to in the subgroups
- G01D3/08—Indicating or recording apparatus with provision for the special purposes referred to in the subgroups with provision for safeguarding the apparatus, e.g. against abnormal operation, against breakdown
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
- G01D5/32—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light
- G01D5/34—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells
- G01D5/347—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells using displacement encoding scales
- G01D5/3473—Circular or rotary encoders
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Optical Transform (AREA)
- Testing Of Devices, Machine Parts, Or Other Structures Thereof (AREA)
- Rolling Contact Bearings (AREA)
- Transmission And Conversion Of Sensor Element Output (AREA)
- Length Measuring Devices With Unspecified Measuring Means (AREA)
Description
2 基準尺
3 走査検知ユニット
4 軸受、回転軸受
10 ケーシング
20 目盛板
25 測定目盛
30 照光装置
31 光源
32 コリメータ
33 走査検知プレート
35 ディテクタ装置、検出装置、ディテクタユニット
36 導線基板
38 部品ユニット
40 シャフト
Claims (19)
- 位置測定装置であって、
基準尺(2)と、
位置を特定するために前記基準尺(2)を走査検知する走査検知ユニット(3)と、
回転軸受(4)であって、前記基準尺(2)または前記走査検知ユニット(3)を回転可能に支承することにより、前記位置測定装置(1)の駆動中に前記基準尺(2)と前記走査検知ユニット(3)とが互いの間で回転可能である回転軸受(4)と
を備え、
前記走査検知ユニット(3)は、前記基準尺(2)と前記走査検知ユニット(3)との相対運動に関係する回転角度を特定できる出力信号を生成し、
前記位置測定装置は、さらに、軸受不良の発生に関して前記回転軸受(4)を監視するための監視手段を備え、
前記監視手段は、前記走査検知ユニット(3)の検知手段(30,35)に対して前記基準尺(2)の複数の異なった相対位置で、それぞれ少なくとも1つの測定量(A,P)を検出して評価するように構成され設けられており、それにより複数の相対位置で検出された前記測定量(A,P)に対して、該測定量のあるべき挙動からのズレを求め、
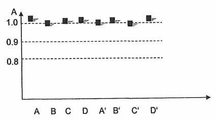
前記基準尺(2)の複数位置(A〜H、A’〜H’)で前記測定量(A,P)が検出され、
前記測定量(A,P)をそれぞれ検出する、前記基準尺(2)の前記複数位置(A〜H、A’〜H’)は、前記基準尺(2)のセグメントにより形成されており、
前記基準尺(2)の特定セグメント(A〜H,A’〜H’)に対して観察した測定量(A,P)の代表値として、それぞれ、該セグメントについて求めた前記測定量(A,P)の平均値を利用する
位置測定装置。 - 位置測定装置であって、
基準尺(2)と、
位置を特定するために前記基準尺(2)を走査検知する走査検知ユニット(3)と、
回転軸受(4)であって、前記基準尺(2)または前記走査検知ユニット(3)を回転可能に支承することにより、前記位置測定装置(1)の駆動中に前記基準尺(2)と前記走査検知ユニット(3)とが互いの間で回転可能である回転軸受(4)と
を備え、
前記走査検知ユニット(3)は、前記基準尺(2)と前記走査検知ユニット(3)との相対運動に関係する回転角度を特定できる出力信号を生成し、
前記位置測定装置は、さらに、軸受不良の発生に関して前記回転軸受(4)を監視するための監視手段を備え、
前記監視手段は、前記走査検知ユニット(3)の検知手段(30,35)に対して前記基準尺(2)の複数の異なった相対位置で、それぞれ少なくとも1つの測定量(A,P)を検出して評価するように構成され設けられており、それにより複数の相対位置で検出された前記測定量(A,P)に対して、該測定量のあるべき挙動からのズレを求め、
前記監視手段は、前記走査検知ユニット(3)に対する前記基準尺(2)の相対位置に関係して、観察する前記測定量(A,P)の変化を評価するように構成され設けられており、
監視する前記測定量(A,P)の周期性が評価される
位置測定装置。 - 請求項1または請求項2に記載の位置測定装置であって、
前記監視手段は、前記走査検知ユニット(3)の出力信号にとって特徴的である前記測定量(A,P)を検出して評価するように構成され設けられている
位置測定装置。 - 請求項1ないし請求項3のいずれか一項に記載の位置測定装置であって、
前記監視手段は、前記走査検知ユニット(3)の出力信号から生成できる前記測定量(A,P)を検出して評価するように構成され設けられている
位置測定装置。 - 請求項1ないし請求項4のいずれか一項に記載の位置測定装置であって、
前記監視手段は、前記走査検知ユニット(3)の出力信号の振幅(A)を検出して評価するように構成され設けられている
位置測定装置。 - 請求項1ないし請求項5のいずれか一項に記載の位置測定装置であって、
前記監視手段は、前記走査検知ユニット(3)の出力信号の位相(P)を検出して評価するように構成され設けられている
位置測定装置。 - 請求項1ないし請求項6のいずれか一項に記載の位置測定装置であって、
前記監視手段には、メモリが割り当てられており、
前記メモリは、前記走査検知ユニット(3)に対する前記基準尺(2)の異なった相対位置でそれぞれ検出された前記測定量(A,P)を記憶する
位置測定装置。 - 請求項2および請求項2を引用元に含む請求項3ないし請求項7のいずれか一項に記載の位置測定装置であって、
前記基準尺(2)の複数位置(A〜H、A’〜H’)で前記測定量(A,P)を検出する
位置測定装置。 - 請求項2、請求項2を引用元に含む請求項3ないし請求項7、および、請求項8のいずれか一項に記載の位置測定装置であって、
前記測定量(A,P)をそれぞれ検出する、前記基準尺(2)の前記複数位置(A〜H、A’〜H’)は、前記基準尺(2)のセグメントにより形成されている
位置測定装置。 - 請求項1、請求項1を引用元に含む請求項3ないし請求項7、請求項8および請求項9のいずれか一項に記載の位置測定装置であって、
前記測定量(A,P)をそれぞれ検出する前記基準尺(2)の位置(A〜H、A’〜H’)は、前記基準尺(2)に回転対称で配置されている
位置測定装置。 - 請求項1、請求項1を引用元に含む請求項3ないし請求項7、および、請求項8ないし請求項10のいずれか一項に記載の位置測定装置であって、
観察する前記測定量(A,P)を検出する前記基準尺(2)の各位置(A〜H)に対して、前記基準尺(2)において対向すると共に同じく観察する前記測定量(A,P)を検出する位置(A’〜H’)が設けられており、
互いに対向する前記基準尺(2)の位置(A,A’;B,B’;・・・;H,H’)は、それぞれ180°の回転により互いに重なる
位置測定装置。 - 請求項9、請求項10、および、請求項9または請求項10を引用元に含む請求項11のいずれか一項に記載の位置測定装置であって、
前記基準尺(2)の特定セグメント(A〜H,A’〜H’)に対して観察した測定量(A,P)の代表値として、それぞれ、該セグメントについて求めた前記測定量(A,P)の平均値を利用する
位置測定装置。 - 請求項1、請求項3ないし請求項7、および、請求項1を引用元に含む請求項10ないし請求項12のいずれか一項に記載の位置測定装置であって、
前記監視手段は、前記走査検知ユニット(3)に対する前記基準尺(2)の相対位置に関係して、観察する前記測定量(A,P)の変化を評価するように構成され設けられている
位置測定装置。 - 請求項13に記載の位置測定装置であって、
監視する前記測定量(A,P)の周期性について評価する
位置測定装置。 - 請求項請求項2、請求項2を引用元に含む請求項3ないし請求項7、請求項8、請求項9、請求項2を引用元に含む請求項10ないし請求項12、請求項13および請求項14のいずれか一項に記載の位置測定装置であって、
360°までの前記基準尺(2)および前記走査検知ユニット(3)の最大限可能な相対運動について観察する測定量を平均して平均値(AM)を求め、
前記平均値からの偏差について観察する前記測定量(A,P)を評価する
位置測定装置。 - 位置測定装置を駆動するための方法であって、
走査検知ユニット(3)が位置測定のために基準尺(2)を走査検知する工程と、
他方で、前記基準尺(2)および前記走査検知ユニット(3)が、回転軸受(4)を使って互いの間で回転する工程と、
前記位置測定装置(1)の駆動時に、監視手段によって軸受不良について前記回転軸受(4)を調べる工程と
を備え、
監視手段は、前記走査検知ユニット(3)の検知手段(30,35)に対する前記基準尺(2)の複数の異なった相対位置で、それぞれ少なくとも1つの測定量(A,P)を検出して評価し、複数の前記相対位置で検出した前記測定量(A,P)を使って、前記測定量のあるべき挙動からのズレを求め、
前記基準尺(2)の複数位置(A〜H、A’〜H’)で前記測定量(A,P)が検出され、
前記測定量(A,P)をそれぞれ検出する、前記基準尺(2)の前記複数位置(A〜H、A’〜H’)は、前記基準尺(2)のセグメントにより形成されており、
前記基準尺(2)の特定セグメント(A〜H,A’〜H’)に対して観察した測定量(A,P)の代表値として、それぞれ、該セグメントについて求めた前記測定量(A,P)の平均値を利用する
方法。 - 位置測定装置を駆動するための方法であって、
走査検知ユニット(3)が位置測定のために基準尺(2)を走査検知する工程と、
他方で、前記基準尺(2)および前記走査検知ユニット(3)が、回転軸受(4)を使って互いの間で回転する工程と、
前記位置測定装置(1)の駆動時に、監視手段によって軸受不良について前記回転軸受(4)を調べる工程と
を備え、
監視手段は、前記走査検知ユニット(3)の検知手段(30,35)に対する前記基準尺(2)の複数の異なった相対位置で、それぞれ少なくとも1つの測定量(A,P)を検出して評価し、複数の前記相対位置で検出した前記測定量(A,P)を使って、前記測定量のあるべき挙動からのズレを求め、
前記監視手段は、前記走査検知ユニット(3)に対する前記基準尺(2)の相対位置に関係して、観察する前記測定量(A,P)の変化を評価するように構成され設けられており、
監視する前記測定量(A,P)の周期性について評価する
方法。 - 請求項16または請求項17に記載の方法であって、
前記走査検知ユニット(3)に対して前記基準尺(2)を回転運動させることにより、前記走査検知ユニット(3)の前記検知手段(30,35)に対する前記基準尺(2)の複数の異なった相対位置で、少なくとも1つの前記測定量(A,P)を検出し、
方法。 - 請求項16ないし請求項18のいずれか一項に記載の方法であって、
請求項1ないし請求項15のいずれか一項に記載の位置測定装置を使用する
方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102012207656A DE102012207656A1 (de) | 2012-05-08 | 2012-05-08 | Positionsmesseinrichtung und Verfahren zum Betreiben der Positionsmesseinrichtung |
| DE102012207656.5 | 2012-05-08 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013234998A JP2013234998A (ja) | 2013-11-21 |
| JP6204692B2 true JP6204692B2 (ja) | 2017-09-27 |
Family
ID=47683612
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013096737A Active JP6204692B2 (ja) | 2012-05-08 | 2013-05-02 | 位置測定装置および位置測定装置を駆動する方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10197388B2 (ja) |
| EP (1) | EP2662666B1 (ja) |
| JP (1) | JP6204692B2 (ja) |
| CN (1) | CN103389062B (ja) |
| DE (1) | DE102012207656A1 (ja) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AT511200B1 (de) * | 2011-10-20 | 2012-10-15 | Isiqiri Interface Tech Gmbh | Echtzeitmessung von relativen positionsdaten und/oder von geometrischen massen eines bewegten körpers unter verwendung optischer messmittel |
| JP2016014574A (ja) * | 2014-07-01 | 2016-01-28 | キヤノン株式会社 | アブソリュートエンコーダ |
| US9863790B1 (en) * | 2015-06-08 | 2018-01-09 | X Development Llc | Devices and methods for a rotary encoder |
| DE102016224012A1 (de) * | 2016-12-02 | 2018-06-07 | Dr. Johannes Heidenhain Gmbh | Positionsmesseinrichtung und Verfahren zum Betreiben einer Positionsmesseinrichtung |
| EP3382349B1 (de) * | 2017-03-29 | 2019-05-15 | Dr. Johannes Heidenhain GmbH | Winkelmesssystem |
| DE102017216666A1 (de) * | 2017-09-20 | 2019-03-21 | Dr. Johannes Heidenhain Gmbh | Positionsmesseinrichtung und Verfahren zum Betreiben einer Positionsmesseinrichtung |
| EP3581910B1 (de) * | 2018-06-14 | 2020-08-26 | Baumer Electric AG | Drehgeber für schienenfahrzeuge |
| DE102019210274A1 (de) * | 2019-07-11 | 2021-01-14 | Dr. Johannes Heidenhain Gmbh | Optische Positionsmesseinrichtung |
| FI3875917T3 (fi) * | 2020-03-02 | 2023-08-10 | Leine & Linde Ab | Kulma-anturi ja menetelmä kulma-anturin toimintahäiriön määrittämiseksi |
| CN113916932B (zh) * | 2021-09-22 | 2024-04-16 | 安徽艺云玻璃有限公司 | 一种检测中空玻璃传热系数的方法 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3276010A (en) * | 1963-07-30 | 1966-09-27 | Baldwin Electronics Inc | Method and means for correcting output indications of an encoder |
| DE3342940A1 (de) * | 1983-11-26 | 1985-06-05 | Dr. Johannes Heidenhain Gmbh, 8225 Traunreut | Mehrstufiger winkelkodierer |
| JPH07218239A (ja) * | 1993-12-06 | 1995-08-18 | Ntn Corp | 回転角度検出器付軸受 |
| US5774074A (en) | 1997-01-21 | 1998-06-30 | Hewlett-Packard Company | Multi-track position encoder system |
| SE514067C2 (sv) * | 1997-06-03 | 2000-12-18 | Leine & Linde Ab | Förfarande för fastställande av ett tillstånd i en givare, samt en givare med organ för tillståndsbedömning |
| JP3685944B2 (ja) * | 1998-03-10 | 2005-08-24 | 山洋電気株式会社 | エンコーダ装置の高精度化方法及び高精度エンコーダ装置 |
| DE19939643B4 (de) | 1999-08-18 | 2005-10-13 | Trimble Jena Gmbh | Einrichtung und Verfahren zur Positionsbestimmung zwischen zwei relativ zueinander beweglichen Teilen |
| KR100602800B1 (ko) * | 2003-12-10 | 2006-07-20 | 안진우 | 아날로그 엔코더장치에 의한 에스알엠의 정밀 각도 제어방법 |
| JP3987498B2 (ja) * | 2004-02-03 | 2007-10-10 | ファナック株式会社 | モニター装置 |
| US7187305B2 (en) * | 2004-09-21 | 2007-03-06 | Kollmorgen Corporation | Encoder for a motor controller |
| JP2007172150A (ja) * | 2005-12-20 | 2007-07-05 | Honda Motor Co Ltd | 産業機械の故障診断方法 |
| DE102006008840B4 (de) * | 2006-02-25 | 2009-05-14 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Beleuchtungsvorrichtung für zylindrische Objekte, damit durchgeführtes Oberflächenuntersuchungsverfahren und Computerprogrammprodukt |
| JP2007248117A (ja) * | 2006-03-14 | 2007-09-27 | Japan Aerospace Exploration Agency | エレクトロ・ルミネッセンスを用いた光学的エンコーダ |
| EP1944582A1 (de) * | 2007-01-09 | 2008-07-16 | Leica Geosystems AG | Verfahren zur bestimmuing einer einflussgrosse auf die exzentrizitat in einem wineklmesser |
| DE102007036271A1 (de) | 2007-07-31 | 2009-02-05 | Baumer Hübner GmbH | Drehgeber mit Überwachung des Lagerverschleißes sowie Verfahren hierzu |
-
2012
- 2012-05-08 DE DE102012207656A patent/DE102012207656A1/de not_active Withdrawn
-
2013
- 2013-02-11 EP EP13154778.8A patent/EP2662666B1/de active Active
- 2013-05-02 JP JP2013096737A patent/JP6204692B2/ja active Active
- 2013-05-08 US US13/889,645 patent/US10197388B2/en active Active
- 2013-05-08 CN CN201310166774.7A patent/CN103389062B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2013234998A (ja) | 2013-11-21 |
| CN103389062B (zh) | 2019-05-31 |
| EP2662666A3 (de) | 2016-08-24 |
| CN103389062A (zh) | 2013-11-13 |
| US20130301059A1 (en) | 2013-11-14 |
| EP2662666A2 (de) | 2013-11-13 |
| EP2662666B1 (de) | 2018-11-28 |
| US10197388B2 (en) | 2019-02-05 |
| DE102012207656A1 (de) | 2013-11-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6204692B2 (ja) | 位置測定装置および位置測定装置を駆動する方法 | |
| US7304295B2 (en) | Method and system of detecting eccentricity and up/down movement of a code wheel of an optical encoder set | |
| US10175357B2 (en) | Laser range finding sensor and range finding method thereof | |
| US8353628B1 (en) | Method and system for tomographic projection correction | |
| JP5128368B2 (ja) | エンコーダ用のスケール及びエンコーダ | |
| JP5334861B2 (ja) | 厚さ測定のための方法及び装置 | |
| KR102518930B1 (ko) | 시트 두께 측정 장치 | |
| JP2019517004A (ja) | 適応性のある基準マーク検出プロセス | |
| US20090139968A1 (en) | Seam position control for laser processing | |
| JP4737598B2 (ja) | エンコーダ | |
| JP2008122349A (ja) | 測定装置 | |
| EP2546613A2 (en) | Method for working out the eccentricity and the angular position of a rotating element and Device for carrying out such a method | |
| JP7464446B2 (ja) | 角度測定機構および角度測定機構の動作方法 | |
| JP2014524570A (ja) | デュアル読み取りヘッド光学エンコーダを備える回転式レオメータ | |
| JP4580060B2 (ja) | 光学位置測定装置の走査ユニット | |
| KR20210095308A (ko) | 디스크 검사장치 | |
| JP2013002874A (ja) | エンコーダ | |
| JP2011209092A (ja) | 丸棒検査装置及び丸棒検査方法 | |
| WO2001096813A2 (en) | System of monitoring bearing performance | |
| JP6768622B2 (ja) | 検査方法および検査装置 | |
| JP2006284521A (ja) | エンコーダ | |
| JP3018099B2 (ja) | 回転体軸受の異常検出方法 | |
| KR102606315B1 (ko) | 다수개의 고무패킹 폭 순차 검사 장치 | |
| JP5597014B2 (ja) | 物体の表面を光学的に検査するための装置 | |
| KR101199656B1 (ko) | 펌프 메카니컬씰 결함두께 측정 장치 및 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160205 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20161222 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170104 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170329 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170803 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170901 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6204692 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |