JP2016014574A - アブソリュートエンコーダ - Google Patents
アブソリュートエンコーダ Download PDFInfo
- Publication number
- JP2016014574A JP2016014574A JP2014136215A JP2014136215A JP2016014574A JP 2016014574 A JP2016014574 A JP 2016014574A JP 2014136215 A JP2014136215 A JP 2014136215A JP 2014136215 A JP2014136215 A JP 2014136215A JP 2016014574 A JP2016014574 A JP 2016014574A
- Authority
- JP
- Japan
- Prior art keywords
- marks
- scale
- code
- absolute encoder
- signal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000012545 processing Methods 0.000 claims abstract description 36
- 238000001514 detection method Methods 0.000 claims abstract description 20
- 238000006243 chemical reaction Methods 0.000 claims description 67
- 230000000737 periodic effect Effects 0.000 claims description 27
- 230000000295 complement effect Effects 0.000 claims description 2
- 238000003491 array Methods 0.000 description 20
- 238000010586 diagram Methods 0.000 description 16
- 238000002834 transmittance Methods 0.000 description 15
- 238000000034 method Methods 0.000 description 13
- 230000005540 biological transmission Effects 0.000 description 10
- 125000004122 cyclic group Chemical group 0.000 description 6
- 230000003287 optical effect Effects 0.000 description 5
- 238000013461 design Methods 0.000 description 4
- 238000010606 normalization Methods 0.000 description 3
- 238000000151 deposition Methods 0.000 description 2
- 238000004587 chromatography analysis Methods 0.000 description 1
- 239000000428 dust Substances 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 239000000696 magnetic material Substances 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
Images
















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
- G01D5/32—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light
- G01D5/34—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells
- G01D5/347—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells using displacement encoding scales
- G01D5/34776—Absolute encoders with analogue or digital scales
- G01D5/34792—Absolute encoders with analogue or digital scales with only digital scales or both digital and incremental scales
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/244—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing characteristics of pulses or pulse trains; generating pulses or pulse trains
- G01D5/24457—Failure detection
- G01D5/24461—Failure detection by redundancy or plausibility
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/244—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing characteristics of pulses or pulse trains; generating pulses or pulse trains
- G01D5/245—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing characteristics of pulses or pulse trains; generating pulses or pulse trains using a variable number of pulses in a train
- G01D5/2454—Encoders incorporating incremental and absolute signals
- G01D5/2455—Encoders incorporating incremental and absolute signals with incremental and absolute tracks on the same encoder
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
- G01D5/32—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light
- G01D5/34—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells
- G01D5/347—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells using displacement encoding scales
- G01D5/3473—Circular or rotary encoders
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
- G01D5/32—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light
- G01D5/34—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells
- G01D5/347—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells using displacement encoding scales
- G01D5/34776—Absolute encoders with analogue or digital scales
- G01D5/34784—Absolute encoders with analogue or digital scales with only analogue scales or both analogue and incremental scales
Abstract
Description
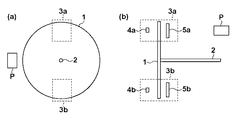
図1は、実施例1のアブソリュートエンコーダの構成を説明するための図である。実施例のアブソリュートエンコーダは、軸を回転中心として回転する円板(回転体)に複数のマークが間隙およびピッチをもって配列されたスケールを有し、スケールの絶対回転角度を算出するアブソリュートロータリーエンコーダとして構成されている。本実施例1では、検出部(ヘッド)3は点対称(2回対称)すなわち180度対向した配置になっており、アブソリュートコードはバイナリのコードを例に用いて説明する。図1(a)に示したように、実施例1のアブソリュートロータリーエンコーダは、円板状のスケール1と、2つのヘッド3a,3bと、スケール1の座標を得る処理部Pとを含む。スケール1は、軸2を回転中心に回転可能な構成をとり、少なくとも2種類のマークを含む複数のマークが一定の周期で軸2の周りに周方向に沿って放射状に配列されている。図1(b)は、図1(a)の断面図である。ヘッド3のそれぞれは、光源4と、複数の光電変換素子を有する光電変換素子アレイ(検出器)5を含む。2つのヘッド3a,3bは、互いに180度ずれた点対称な位置に設置される。
実施例1では、透過マーク1a、非透過マーク1b、半透過マーク1cの透過率の例として、それぞれ、60%、5%、30%と設定した例を挙げた。しかし、非透過マーク1bと半透過マーク1cの透過率の値を等しくする構成も可能である。図7に、非透過マーク1bと半透過マーク1cの透過率の値を等しくする構成での例を示した。使用している符号列は、実施例1と同じで、図3に示した符号列である。符号列のNo.1〜No.16とNo.501〜No.516を読み取る場合を示している。図7(c)、(d)は、それぞれ、光電変換素子アレイ5a、5bから出力される光量分布6を反映した出力信号を示す。図7(c)、(d)に示される波形データをそれぞれ波形データa、波形データbと呼ぶこととする。図7(e)は、波形データaおよび波形データbのCh毎の和のデータ(a+b)であり、図7(f)は、波形データaと波形データbとのCh毎の差のデータ(a−b)を示す。図7(c)をみると、非透過マーク1bと半透過マーク1cとの透過率の値が等しいため、周期信号に欠落が生じているが、加算処理を行うことで欠落のない周期信号が得られることがわかる。また、図7(f)に示されデータ(a−b)から符号判定用のデータも実施例1と同様に得られることがわかる。得られた信号の信号処理は、実施例1と同様に行うことができる。以上のように、非透過マーク1bと半透過マーク1cの透過率の値を等しくする構成においても、計算負荷の小さい構成で高精度なアブソリュートロータリーエンコーダを実現できる。
実施例1、2ではアブソリュートコードは0、1で表されるバイナリコードを採用した例をあげたが、多値のコードを採用することも可能である。実施例3では例として0、1、2という3値のコードを採用した場合について示す。スケール1以外の構成は実施例1、2と共通のため省略する。スケール1は、図示しないが非透過マーク1bを基準マークとして配置し、その間にコード用マークとして透過マーク1a、第1半透過マーク1c、第2半透過マーク1dを配列してアブソリュートコードを埋め込んだ構成をとっている。透過マーク1a、非透過マーク1b、第1半透過マーク1c、第2半透過マーク1dの透過率の例として、それぞれ、60%、5%、40%、20%と設定することができる。
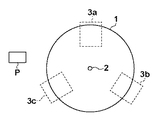
実施例1〜3では、光源4と光電変換素子アレイ5との組3a,3bをスケール1の回転軸2に対して2回対称、すなわち、180°ずらして対向配置した例を示した。しかし、光源4と光電変換素子アレイ5との組をさらに増やす配置も可能である。実施例4では、光源4と光電変換素子アレイ5との組3a〜3cをスケール1の回転軸2に対して3回回転対称に配置した場合について示す。図12に示したように、アブソリュートロータリーエンコーダは、スケール1と、光源4と光電変換素子アレイ5とを有する3組の検出部3と、信号処理部Pとを含む。スケール1は、回転軸2を中心に回転可能な構成をとり、図示しないエンコーダパターンを形成する複数のマークがスケール1の上に放射状に配列されている。
本発明は、上記実施例の構成にとらわれず、その要旨の範囲内で種々の変形および変更が可能である。上記実施例では、スケール1の透過マーク1a、非透過マーク1bのインクリメンタルパターンを元に透過マーク1aの一部を半透過マーク1cに置き換えることで、透過マーク1aと半透過マーク1cとの配置でアブソリュートコードを埋め込んだ構成をとっている。しかし、非透過マーク1b、半透過マーク1cの配置でアブソリュートコードを埋め込むこともできる。また、上記実施例では透過マーク1a、非透過マーク1b、半透過マーク1cの例として透過率を変える構成をとっているが、ハッチングや格子の狭い広いなどの透過マーク1a、非透過マーク1bを透過部分の面積の違いによって構成してもよい。
Claims (14)
- 複数種類のマークを含む複数のマークが間隙およびピッチをもって配列されたスケールと、
それぞれが前記複数のマークのうちの一部のマーク群を検出して該マーク群に対応する信号を出力する複数の検出部と、
前記複数の検出部の出力に基づいて前記スケールの座標を得る処理部と、を備えるアブソリュートエンコーダであって、
前記スケールは、前記複数の検出部によってそれぞれ出力された複数の信号を加算することで得られる信号が複数周期分の周期信号を含むように、前記複数のマークが配列され、
前記処理部は、前記マーク群のうちのマークに対応する部分ごとの前記複数の信号のうちの少なくとも1つの信号の大きさに基づいて第1位置データを得、前記第1位置データの分解能より小さい分解能を有する第2位置データを前記周期信号の位相に基づいて得、前記第1位置データと前記第2位置データとに基づいて前記座標を表すデータを生成する、
ことを特徴とするアブソリュートエンコーダ。 - 前記複数のマークは、前記複数の検出部が前記配列に沿って配置されたピッチをもって配置された複数のマークが相補的な且つ互いに異なる複数の特性をそれぞれ有することを特徴とする請求項1に記載のアブソリュートエンコーダ。
- 前記複数の検出部のそれぞれは、連続するn個のマークを前記マーク群として検出し、前記マーク群のうちi番目(ただし、iは、1、2、・・・、nのいずれか)のマークに対応する信号の大きさの前記複数の検出部にわたる総和がiの値によらず一定であるように、前記複数のマークが前記スケールに配列されていることを特徴とする請求項1または請求項2に記載のアブソリュートエンコーダ。
- 前記処理部は、前記複数の信号のうちの1つの信号から他の信号を減算して得られた信号の大きさを量子化することによって前記第1位置データを得ることを特徴とする請求項1ないし3のうちいずれか1項に記載のアブソリュートエンコーダ。
- 前記スケールは、軸を有する回転体に配置され、前記軸の周りに配列された前記複数のマークを含み、前記処理部は、前記座標として回転角度を得ることを特徴とする請求項1ないし4のうちいずれか1項に記載のアブソリュートエンコーダ。
- 前記回転体は、円板であり、前記複数の検出部は、前記軸に関する複数回回転対称な位置にそれぞれ配置されていることを特徴とする請求項5に記載のアブソリュートエンコーダ。
- 前記回転体は、円筒体であり、前記スケールは、前記円筒体の円筒面に前記複数のマークを含み、前記複数の検出部は、前記軸に関する複数回回転対称な位置にそれぞれ配置されていることを特徴とする請求項5に記載のアブソリュートエンコーダ。
- 前記スケールは、直線に沿って配列された前記複数のマークを含み、前記処理部は、前記座標として前記直線に沿った位置を得ることを特徴とする請求項1ないし4のうちいずれか1項に記載のアブソリュートエンコーダ。
- 前記複数の検出部のそれぞれは、光電変換素子アレイを含むことを特徴とする請求項1ないし8のうちいずれか1項に記載のアブソリュートエンコーダ。
- 前記複数の検出部のそれぞれは、前記マーク群を透過した光を検出することを特徴とする請求項9に記載のアブソリュートエンコーダ。
- 前記複数のマークは、その透過光量が互いに異なる複数種類のマークを含むことを特徴とする請求項10に記載のアブソリュートエンコーダ。
- 前記複数の検出部のそれぞれは、前記マーク群で反射した光を検出することを特徴とする請求項9に記載のアブソリュートエンコーダ。
- 前記複数のマークは、その反射光量が互いに異なる複数種類のマークを含むことを特徴とする請求項12に記載のアブソリュートエンコーダ。
- 前記処理部は、前記周期信号の周期ごとの振幅に基づいて、エラーを示す信号を出力することを特徴とする請求項1ないし13のうちいずれか1項に記載のアブソリュートエンコーダ。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014136215A JP2016014574A (ja) | 2014-07-01 | 2014-07-01 | アブソリュートエンコーダ |
| EP15001887.7A EP2963393B1 (en) | 2014-07-01 | 2015-06-25 | Absolute encoder |
| US14/754,921 US9880028B2 (en) | 2014-07-01 | 2015-06-30 | Absolute encoder |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014136215A JP2016014574A (ja) | 2014-07-01 | 2014-07-01 | アブソリュートエンコーダ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2016014574A true JP2016014574A (ja) | 2016-01-28 |
Family
ID=53491251
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014136215A Pending JP2016014574A (ja) | 2014-07-01 | 2014-07-01 | アブソリュートエンコーダ |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US9880028B2 (ja) |
| EP (1) | EP2963393B1 (ja) |
| JP (1) | JP2016014574A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021527230A (ja) * | 2018-06-07 | 2021-10-11 | エム. ジョンソン、フィリップ | 線形及び回転マルチトラック絶対位置エンコーダ並びにそれを使用した方法 |
| WO2022044323A1 (ja) * | 2020-08-31 | 2022-03-03 | 三菱電機株式会社 | アブソリュートエンコーダ |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105675030B (zh) * | 2016-03-23 | 2017-10-17 | 北京天诚同创电气有限公司 | 用于绝对值编码器的测量方法和装置 |
| RU2645880C1 (ru) * | 2017-01-17 | 2018-02-28 | Федеральное государственное бюджетное образовательное учреждение высшего образования "Тульский государственный университет" (ТулГУ) | Абсолютный оптический однооборотный угловой энкодер |
| JP7258515B2 (ja) | 2018-10-26 | 2023-04-17 | Dmg森精機株式会社 | 位置検出装置および搬送装置 |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009047595A (ja) * | 2007-08-21 | 2009-03-05 | Mitsutoyo Corp | 絶対位置測長型エンコーダ |
| JP2009150879A (ja) * | 2007-12-19 | 2009-07-09 | Dr Johannes Heidenhain Gmbh | 絶対位置を測定するための位置測定装置と方法 |
| US20090236507A1 (en) * | 2007-10-07 | 2009-09-24 | Avago Technologies Ecbu Ip (Singapore) Pte. Ltd. | Shaft-mounted detector for optical encoder |
| JP2011107106A (ja) * | 2009-11-20 | 2011-06-02 | Olympus Corp | 光学式信号出力装置の信号処理装置及び光学式変位検出装置 |
| JP2011520100A (ja) * | 2008-05-02 | 2011-07-14 | ドクトル・ヨハネス・ハイデンハイン・ゲゼルシヤフト・ミツト・ベシユレンクテル・ハフツング | 位置測定装置 |
| JP2012127818A (ja) * | 2010-12-15 | 2012-07-05 | Canon Inc | アブソリュートロータリーエンコーダ |
| JP2013234998A (ja) * | 2012-05-08 | 2013-11-21 | Dr Johannes Heidenhain Gmbh | 位置測定装置および位置測定装置を駆動する方法 |
| JP2014021122A (ja) * | 2012-07-20 | 2014-02-03 | Dr Johannes Heidenhain Gmbh | エンコーダ |
| JP2014119326A (ja) * | 2012-12-14 | 2014-06-30 | Canon Inc | アブソリュートエンコーダ |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10201496A1 (de) | 2002-01-17 | 2003-07-31 | Heidenhain Gmbh Dr Johannes | Maßstab und Positionsmesseinrichtung zur absoluten Positionsbestimmung |
| JP5379761B2 (ja) | 2010-08-06 | 2013-12-25 | キヤノン株式会社 | アブソリュートエンコーダ |
-
2014
- 2014-07-01 JP JP2014136215A patent/JP2016014574A/ja active Pending
-
2015
- 2015-06-25 EP EP15001887.7A patent/EP2963393B1/en not_active Not-in-force
- 2015-06-30 US US14/754,921 patent/US9880028B2/en not_active Expired - Fee Related
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009047595A (ja) * | 2007-08-21 | 2009-03-05 | Mitsutoyo Corp | 絶対位置測長型エンコーダ |
| US20090236507A1 (en) * | 2007-10-07 | 2009-09-24 | Avago Technologies Ecbu Ip (Singapore) Pte. Ltd. | Shaft-mounted detector for optical encoder |
| JP2009150879A (ja) * | 2007-12-19 | 2009-07-09 | Dr Johannes Heidenhain Gmbh | 絶対位置を測定するための位置測定装置と方法 |
| JP2011520100A (ja) * | 2008-05-02 | 2011-07-14 | ドクトル・ヨハネス・ハイデンハイン・ゲゼルシヤフト・ミツト・ベシユレンクテル・ハフツング | 位置測定装置 |
| JP2011107106A (ja) * | 2009-11-20 | 2011-06-02 | Olympus Corp | 光学式信号出力装置の信号処理装置及び光学式変位検出装置 |
| JP2012127818A (ja) * | 2010-12-15 | 2012-07-05 | Canon Inc | アブソリュートロータリーエンコーダ |
| JP2013234998A (ja) * | 2012-05-08 | 2013-11-21 | Dr Johannes Heidenhain Gmbh | 位置測定装置および位置測定装置を駆動する方法 |
| JP2014021122A (ja) * | 2012-07-20 | 2014-02-03 | Dr Johannes Heidenhain Gmbh | エンコーダ |
| JP2014119326A (ja) * | 2012-12-14 | 2014-06-30 | Canon Inc | アブソリュートエンコーダ |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021527230A (ja) * | 2018-06-07 | 2021-10-11 | エム. ジョンソン、フィリップ | 線形及び回転マルチトラック絶対位置エンコーダ並びにそれを使用した方法 |
| WO2022044323A1 (ja) * | 2020-08-31 | 2022-03-03 | 三菱電機株式会社 | アブソリュートエンコーダ |
| KR20220123761A (ko) * | 2020-08-31 | 2022-09-08 | 미쓰비시덴키 가부시키가이샤 | 앱솔루트 인코더 |
| CN115210538A (zh) * | 2020-08-31 | 2022-10-18 | 三菱电机株式会社 | 绝对编码器 |
| KR102507084B1 (ko) * | 2020-08-31 | 2023-03-07 | 미쓰비시덴키 가부시키가이샤 | 앱솔루트 인코더 |
| CN115210538B (zh) * | 2020-08-31 | 2023-04-25 | 三菱电机株式会社 | 绝对编码器 |
Also Published As
| Publication number | Publication date |
|---|---|
| US9880028B2 (en) | 2018-01-30 |
| EP2963393B1 (en) | 2019-05-01 |
| EP2963393A1 (en) | 2016-01-06 |
| US20160003645A1 (en) | 2016-01-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5379761B2 (ja) | アブソリュートエンコーダ | |
| JP5787513B2 (ja) | アブソリュートロータリーエンコーダ | |
| JP5611998B2 (ja) | 単一の光トラックを用いる3チャネルエンコーダ | |
| JP5832088B2 (ja) | ロータリーエンコーダ | |
| JP5253394B2 (ja) | 軸周りの回転角度を測定する光電子角度センサとその測定方法 | |
| CN108027259B (zh) | 绝对式编码器 | |
| JP2016014574A (ja) | アブソリュートエンコーダ | |
| JP5479236B2 (ja) | ロータリーエンコーダ | |
| Kim et al. | Absolute angle measurement using a phase-encoded binary graduated disk | |
| JPS63234729A (ja) | 位置検出装置 | |
| JP6338360B2 (ja) | アブソリュートエンコーダ、信号処理方法、およびプログラム | |
| JP2014055893A (ja) | 2次元アブソリュートエンコーダおよびスケール | |
| JP2016223978A (ja) | アブソリュートエンコーダ | |
| JP5974154B2 (ja) | ロータリーエンコーダ | |
| JP2014106210A (ja) | アブソリュートエンコーダ及び絶対位置を求める方法 | |
| JP7203584B2 (ja) | アブソリュートロータリエンコーダ | |
| JP6161325B2 (ja) | アブソリュートエンコーダ | |
| JP6023561B2 (ja) | 計測装置、計測方法、及び、アブソリュートエンコーダ | |
| JP4945976B2 (ja) | 光学式絶対値エンコーダ | |
| CN115597637A (zh) | 光电编码器和绝对角度测量方法 | |
| JPWO2019039344A1 (ja) | エンコーダ | |
| JP2017215301A (ja) | ロータリエンコーダ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170609 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180409 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180601 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180731 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20181225 |