JP6188962B2 - エレベータ装置 - Google Patents
エレベータ装置 Download PDFInfo
- Publication number
- JP6188962B2 JP6188962B2 JP2016550032A JP2016550032A JP6188962B2 JP 6188962 B2 JP6188962 B2 JP 6188962B2 JP 2016550032 A JP2016550032 A JP 2016550032A JP 2016550032 A JP2016550032 A JP 2016550032A JP 6188962 B2 JP6188962 B2 JP 6188962B2
- Authority
- JP
- Japan
- Prior art keywords
- car
- governor
- emergency stop
- rotating disk
- stop device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000007246 mechanism Effects 0.000 claims description 131
- 230000008859 change Effects 0.000 claims description 30
- 239000000725 suspension Substances 0.000 claims description 22
- 230000033001 locomotion Effects 0.000 claims description 12
- 230000005540 biological transmission Effects 0.000 claims description 3
- 230000001133 acceleration Effects 0.000 description 18
- 238000010586 diagram Methods 0.000 description 17
- 230000007257 malfunction Effects 0.000 description 11
- 210000000078 claw Anatomy 0.000 description 6
- 230000001174 ascending effect Effects 0.000 description 4
- 230000009471 action Effects 0.000 description 3
- 238000013016 damping Methods 0.000 description 3
- 238000001514 detection method Methods 0.000 description 3
- 230000000630 rising effect Effects 0.000 description 3
- 208000032368 Device malfunction Diseases 0.000 description 2
- 239000006096 absorbing agent Substances 0.000 description 2
- 238000013459 approach Methods 0.000 description 2
- 230000003139 buffering effect Effects 0.000 description 2
- 230000006835 compression Effects 0.000 description 2
- 238000007906 compression Methods 0.000 description 2
- 230000008602 contraction Effects 0.000 description 2
- 230000003111 delayed effect Effects 0.000 description 2
- 239000012530 fluid Substances 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000000750 progressive effect Effects 0.000 description 2
- 230000035939 shock Effects 0.000 description 2
- 230000005856 abnormality Effects 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
Images






















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B5/00—Applications of checking, fault-correcting, or safety devices in elevators
- B66B5/02—Applications of checking, fault-correcting, or safety devices in elevators responsive to abnormal operating conditions
- B66B5/16—Braking or catch devices operating between cars, cages, or skips and fixed guide elements or surfaces in hoistway or well
- B66B5/18—Braking or catch devices operating between cars, cages, or skips and fixed guide elements or surfaces in hoistway or well and applying frictional retarding forces
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B5/00—Applications of checking, fault-correcting, or safety devices in elevators
- B66B5/02—Applications of checking, fault-correcting, or safety devices in elevators responsive to abnormal operating conditions
- B66B5/04—Applications of checking, fault-correcting, or safety devices in elevators responsive to abnormal operating conditions for detecting excessive speed
- B66B5/044—Mechanical overspeed governors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B5/00—Applications of checking, fault-correcting, or safety devices in elevators
- B66B5/02—Applications of checking, fault-correcting, or safety devices in elevators responsive to abnormal operating conditions
- B66B5/16—Braking or catch devices operating between cars, cages, or skips and fixed guide elements or surfaces in hoistway or well
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B7/00—Other common features of elevators
- B66B7/06—Arrangements of ropes or cables
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Maintenance And Inspection Apparatuses For Elevators (AREA)
- Lift-Guide Devices, And Elevator Ropes And Cables (AREA)
Description
また、この発明に係るエレベータ装置は、昇降路内を昇降するかご、かごを吊り下げる懸架体、かごに搭載されている非常止め装置、非常止め装置に設けられており、非常止め装置を作動させる作動レバー、調速機シーブと、調速機シーブに対して上下方向に間隔をおいて配置されている張車と、調速機シーブ及び前記張車に巻かれており、かつ作動レバーに接続されている調速機ロープとを有している調速機機構、及びかごが、昇降路のうち、少なくとも最下階から定格速度に到達するまでの領域である下部速度変化区間を下降するときに調速機機構の運動に抵抗力を付加し、かごの上昇時には抵抗力を減少又は解除する抵抗力付加機構を備えている。
また、この発明に係るエレベータ装置は、昇降路内を昇降するかご、かごを吊り下げる懸架体、かごに搭載されている非常止め装置、非常止め装置に設けられており、非常止め装置を作動させる作動レバー、調速機シーブと、調速機シーブに対して上下方向に間隔をおいて配置されている張車と、調速機シーブ及び張車に巻かれており、かつ作動レバーに接続されている調速機ロープとを有している調速機機構、及びかごが昇降路を下降するときに調速機機構に追加の慣性質量を付加し、かごの上昇時には慣性質量の付加を解除する慣性質量付加機構を備えている。
実施の形態1.
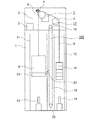
図1はこの発明の実施の形態1によるエレベータ装置を示す構成図である。図において、昇降路1の上部には、機械室2が設けられている。機械室2には、巻上機(駆動装置)3、そらせ車4、及び制御装置5が設置されている。巻上機3は、駆動シーブ6と、駆動シーブ6を回転させる巻上機モータと、駆動シーブ6の回転を制動する巻上機ブレーキ(電磁ブレーキ)7とを有している。
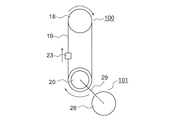
また、実施の形態1では、ラチェット機構30を介して張車20に回転円盤28を接続したが、調速機シーブ18に接続してもよい。
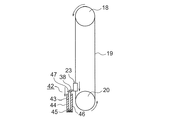
次に、図14はこの発明の実施の形態2によるエレベータ装置の要部を示す構成図である。実施の形態2では、実施の形態1の回転円盤28、回転軸29及びラチェット機構30の代わりに、慣性質量付加機構としての付加質量体41が昇降路1内の下部速度変化区間(昇降路1の下部領域)、即ち最下階から定格速度に到達するまでの領域に設置されている。また、作動レバー16と調速機機構100とを連結する連結部23には、第1の接触部材38が設けられている。
次に、図17はこの発明の実施の形態3によるエレベータ装置の要部を示す構成図である。実施の形態3では、実施の形態2の付加質量体41の代わりに、抵抗力付加機構としてのダンパ機構42が昇降路1内の下部速度変化区間に設けられている。
次に、図20はこの発明の実施の形態4によるエレベータ装置の要部を示す構成図である。実施の形態4では、実施の形態2の付加質量体41の代わりに、昇降路1内の下部速度変化区間に摩擦ガイドレール49が設置されている。摩擦ガイドレール49は、かごガイドレール11に平行に立てられている。
また、この発明は、機械室2を持たない機械室レスエレベータの他、種々のタイプのエレベータ装置に適用できる。
Claims (8)
- 昇降路内を昇降するかご、
前記かごを吊り下げる懸架体、
前記かごに搭載されている非常止め装置、
前記非常止め装置に設けられており、前記非常止め装置を作動させる作動レバー、
調速機シーブと、前記調速機シーブに対して上下方向に間隔をおいて配置されている張車と、前記調速機シーブ及び前記張車に巻かれており、かつ前記作動レバーに接続されている調速機ロープとを有している調速機機構、及び
前記かごが、前記昇降路のうち、少なくとも最下階から定格速度に到達するまでの領域である下部速度変化区間を下降するときに前記調速機機構に追加の慣性質量を付加し、前記かごの上昇時には慣性質量の付加を解除する慣性質量付加機構
を備えているエレベータ装置。 - 前記慣性質量付加機構は、回転円盤と、前記調速機シーブ又は前記張車と前記回転円盤との間に設けられているラチェット機構とを有しており、
前記ラチェット機構は、前記かごの下降時のみ前記調速機機構の運動を前記回転円盤に伝達し前記回転円盤を回転させる請求項1記載のエレベータ装置。 - 前記慣性質量付加機構は、前記回転円盤とは別の回転円盤である追加円盤と、前記回転円盤及び前記追加円盤に巻かれ、前記回転円盤の回転を前記追加円盤に伝達するループ状の伝達体とをさらに有している請求項2記載のエレベータ装置。
- 前記慣性質量付加機構は、下部回転円盤と、前記下部回転円盤の真上に配置されている上部回転円盤と、前記下部回転円盤及び前記上部回転円盤に巻かれたループ状の伝達体とを有する付加質量体であり、
前記付加質量体は、前記かごが前記下部速度変化区間を下降するときに前記調速機機構と一体となって運動し、前記かごの上昇時には前記調速機機構から切り離される請求項1記載のエレベータ装置。 - 昇降路内を昇降するかご、
前記かごを吊り下げる懸架体、
前記かごに搭載されている非常止め装置、
前記非常止め装置に設けられており、前記非常止め装置を作動させる作動レバー、
調速機シーブと、前記調速機シーブに対して上下方向に間隔をおいて配置されている張車と、前記調速機シーブ及び前記張車に巻かれており、かつ前記作動レバーに接続されている調速機ロープとを有している調速機機構、及び
前記かごが、前記昇降路のうち、少なくとも最下階から定格速度に到達するまでの領域である下部速度変化区間を下降するときに前記調速機機構の運動に抵抗力を付加し、前記かごの上昇時には抵抗力を減少又は解除する抵抗力付加機構
を備えているエレベータ装置。 - 前記抵抗力付加機構は、ばね支持されたプランジャを有するダンパ機構であり、
前記プランジャは、前記かごが前記下部速度変化区間を下降するときに前記調速機機構に抵抗力を加えながら下降し、前記かごの上昇時には前記調速機機構から切り離される請求項5記載のエレベータ装置。 - 前記抵抗力付加機構は、前記昇降路内の前記下部速度変化区間に設置された摩擦ガイドレールと、前記調速機ロープと前記作動レバーとの連結部に設けられたクサビ機構とを有する摩擦機構であり、
前記クサビ機構は、
前記摩擦ガイドレールと接触することで摩擦力を受ける摩擦クサビを有しており、
前記かごが前記下部速度変化区間を下降するときに前記摩擦クサビが受ける摩擦力よりも、前記かごが前記下部速度変化区間を上昇するときに前記摩擦クサビが受ける摩擦力が小さくなるように構成されている請求項5記載のエレベータ装置。 - 昇降路内を昇降するかご、
前記かごを吊り下げる懸架体、
前記かごに搭載されている非常止め装置、
前記非常止め装置に設けられており、前記非常止め装置を作動させる作動レバー、
調速機シーブと、前記調速機シーブに対して上下方向に間隔をおいて配置されている張車と、前記調速機シーブ及び前記張車に巻かれており、かつ前記作動レバーに接続されている調速機ロープとを有している調速機機構、及び
前記かごが前記昇降路を下降するときに前記調速機機構に追加の慣性質量を付加し、前記かごの上昇時には慣性質量の付加を解除する慣性質量付加機構
を備えているエレベータ装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014192407 | 2014-09-22 | ||
| JP2014192407 | 2014-09-22 | ||
| PCT/JP2015/073025 WO2016047314A1 (ja) | 2014-09-22 | 2015-08-17 | エレベータ装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2016047314A1 JPWO2016047314A1 (ja) | 2017-04-27 |
| JP6188962B2 true JP6188962B2 (ja) | 2017-08-30 |
Family
ID=55580845
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016550032A Active JP6188962B2 (ja) | 2014-09-22 | 2015-08-17 | エレベータ装置 |
Country Status (5)
| Country | Link |
|---|---|
| JP (1) | JP6188962B2 (ja) |
| KR (1) | KR101928678B1 (ja) |
| CN (1) | CN107074489B (ja) |
| DE (1) | DE112015004314B4 (ja) |
| WO (1) | WO2016047314A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108301800A (zh) * | 2018-04-17 | 2018-07-20 | 长江大学 | 一种潜油电泵防掉井装置 |
| JP7008839B2 (ja) * | 2018-10-02 | 2022-01-25 | 三菱電機株式会社 | ガバナシステムの特性制御装置、及びエレベータ装置 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06183660A (ja) * | 1992-12-04 | 1994-07-05 | Otis Elevator Co | エレベーターの調速機誤動作防止装置 |
| JP4673574B2 (ja) | 2003-05-07 | 2011-04-20 | インベンテイオ・アクテイエンゲゼルシヤフト | 一時的保護スペースを供給するための装置を用いたエレベータ設備、該装置の実装方法、および一時的保護スペースを供給するための方法 |
| WO2006046284A1 (ja) * | 2004-10-27 | 2006-05-04 | Mitsubishi Denki Kabushiki Kaisha | エレベータの非常停止装置 |
| JP2007030999A (ja) * | 2005-07-22 | 2007-02-08 | Hitachi Ltd | エレベーター装置の安全装置およびエレベーター装置の運転方法 |
| JP5205428B2 (ja) | 2010-09-14 | 2013-06-05 | 株式会社日立製作所 | ダブルデッキエレベーター装置 |
| JP5325904B2 (ja) | 2011-02-09 | 2013-10-23 | 株式会社日立製作所 | 非常止め装置及びそれを備えたエレベーター装置 |
| WO2012137279A1 (ja) * | 2011-04-01 | 2012-10-11 | 三菱電機株式会社 | エレベータ装置 |
| JP5726374B2 (ja) * | 2012-04-16 | 2015-05-27 | 三菱電機株式会社 | エレベータ装置 |
| JP5809746B2 (ja) * | 2012-05-21 | 2015-11-11 | 株式会社日立製作所 | エレベーター装置 |
| DE112013003088B4 (de) * | 2012-06-19 | 2019-01-17 | Mitsubishi Electric Corporation | Aufzugvorrichtung |
| JP5845317B2 (ja) * | 2014-06-16 | 2016-01-20 | 東芝エレベータ株式会社 | エレベータの調速機 |
-
2015
- 2015-08-17 CN CN201580050584.6A patent/CN107074489B/zh active Active
- 2015-08-17 JP JP2016550032A patent/JP6188962B2/ja active Active
- 2015-08-17 KR KR1020177003086A patent/KR101928678B1/ko active IP Right Grant
- 2015-08-17 DE DE112015004314.4T patent/DE112015004314B4/de active Active
- 2015-08-17 WO PCT/JP2015/073025 patent/WO2016047314A1/ja active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| CN107074489B (zh) | 2019-03-19 |
| DE112015004314B4 (de) | 2022-01-13 |
| JPWO2016047314A1 (ja) | 2017-04-27 |
| DE112015004314T5 (de) | 2017-06-08 |
| KR101928678B1 (ko) | 2018-12-12 |
| WO2016047314A1 (ja) | 2016-03-31 |
| KR20170026611A (ko) | 2017-03-08 |
| CN107074489A (zh) | 2017-08-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6012596B2 (ja) | エレベータ装置 | |
| JP6152964B2 (ja) | エレベータ装置 | |
| JP6465995B2 (ja) | エレベータ装置 | |
| KR101456403B1 (ko) | 엘리베이터 장치 | |
| KR101617572B1 (ko) | 엘리베이터 장치 | |
| JP5774220B2 (ja) | エレベータ装置 | |
| JP6062009B2 (ja) | エレベータ装置 | |
| EP3342740B1 (en) | A method for avoiding unwanted safety gear tripping in a safety stopping system of an elevator system and a safety stopping system | |
| JP6058176B2 (ja) | エレベーター装置 | |
| US9957133B2 (en) | Elevator apparatus | |
| KR102022894B1 (ko) | 엘리베이터 장치 | |
| JP6188962B2 (ja) | エレベータ装置 | |
| JP2006044894A (ja) | エレベータ装置 | |
| WO2018105036A1 (ja) | エレベータの非常止め作動機構 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170704 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170801 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6188962 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |