JP6183716B2 - 運動支援装置及び運動支援方法、運動支援プログラム - Google Patents
運動支援装置及び運動支援方法、運動支援プログラム Download PDFInfo
- Publication number
- JP6183716B2 JP6183716B2 JP2014191814A JP2014191814A JP6183716B2 JP 6183716 B2 JP6183716 B2 JP 6183716B2 JP 2014191814 A JP2014191814 A JP 2014191814A JP 2014191814 A JP2014191814 A JP 2014191814A JP 6183716 B2 JP6183716 B2 JP 6183716B2
- Authority
- JP
- Japan
- Prior art keywords
- user
- motion
- data
- exercise
- movement
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images













Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Detecting, measuring or recording devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor, mobility of a limb
- A61B5/112—Gait analysis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Detecting, measuring or recording devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor, mobility of a limb
- A61B5/1118—Determining activity level
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Detecting, measuring or recording devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor, mobility of a limb
- A61B5/1121—Determining geometric values, e.g. centre of rotation or angular range of movement
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2503/00—Evaluating a particular growth phase or type of persons or animals
- A61B2503/10—Athletes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2562/00—Details of sensors; Constructional details of sensor housings or probes; Accessories for sensors
- A61B2562/02—Details of sensors specially adapted for in-vivo measurements
- A61B2562/0219—Inertial sensors, e.g. accelerometers, gyroscopes, tilt switches
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6801—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be attached to or worn on the body surface
- A61B5/6813—Specially adapted to be attached to a specific body part
- A61B5/6823—Trunk, e.g., chest, back, abdomen, hip
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/74—Details of notification to user or communication with user or patient ; user input means
Description
利用者の身体に装着されるモーションセンサを有し、前記利用者が足を動かして移動する運動を行っているときに、前記モーションセンサより、前記利用者の身体の動作状態に関するデータを出力するセンサ部と、
前記データに基づいて、前記利用者の運動状態に関する運動データを算出する制御部と、を備え、
前記制御部は、
前記運動により、互いに異なる複数の移動速度の各々で予め設定された区間を前記利用者が移動したときに前記モーションセンサより出力される第1のデータに基づいて、予め設定された複数の運動指標を算出し、
前記複数の運動指標のうちの、前記複数の移動速度の相互の比率に対する相関が相対的に強いものを特定の運動指標として選択し、
前記比率を、前記特定の運動指標を変数とする近似式で表すときの係数を算出し、
前記利用者が前記運動により前記区間と異なる経路を移動したときに、前記特定の運動指標、前記経路の実際の距離及び前記係数に基づいて前記運動データを算出することを特徴とする。
利用者が足を動かして移動する運動を行いながら、互いに異なる複数の移動速度の各々で予め設定された区間を移動したときに、前記利用者の身体に装着されているモーションセンサより出力される第1のデータに基づいて、予め設定された複数の運動指標を算出する工程と、
前記複数の運動指標のうちの、前記複数の移動速度の相互の比率に対する相関が相対的に強いものを特定の運動指標として選択する工程と、
前記比率を、前記特定の運動指標を変数とする近似式で表すときの係数を算出する工程と、
前記利用者が前記運動により前記区間と異なる経路を移動したときに、前記特定の運動指標、前記経路の実際の距離及び前記係数に基づいて、前記利用者の運動状態に関する運動データを算出する工程と、
を含むことを特徴とする。
コンピュータに、
利用者が足を動かして移動する運動を行いながら、互いに異なる複数の移動速度の各々で予め設定された区間を移動したときに、前記利用者の身体に装着されているモーションセンサにより出力される第1のデータに基づいて、予め設定された複数の運動指標を算出させ、
前記複数の運動指標のうちの、前記複数の移動速度の相互の比率に対する相関が相対的に強いものを特定の運動指標として選択させ、
前記比率を、前記特定の運動指標を変数とする近似式で表すときの係数を算出させ、
前記利用者が前記運動により前記区間と異なる経路を移動したときに、前記特定の運動指標、前記経路の実際の距離及び前記係数に基づいて、前記利用者の運動状態に関する運動データを算出させる、
ことを特徴とする。
また、本発明に係る第2の運動支援装置は、
足を動かして移動する運動を行っている利用者の運動状態に関する運動データを算出する制御部を備え、
前記制御部は、
前記利用者が前記運動により互いに異なる複数の移動速度の各々で予め設定された区間を移動したときに前記利用者の身体に装着されているモーションセンサより出力される第1のデータに基づいて、予め設定された複数の運動指標を算出し、
前記複数の運動指標のうちの、前記複数の移動速度の相互の比率に対する相関が相対的に強いものを特定の運動指標として選択し、
前記比率を、前記特定の運動指標を変数とする近似式で表すときの係数を算出し、
前記利用者が前記運動により前記区間と異なる経路を移動したときに、前記特定の運動指標、前記経路の実際の距離及び前記係数に基づいて前記運動データを算出することを特徴とする。
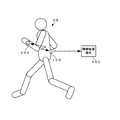
図1は、本発明に係る運動支援装置の一実施形態を示す概略構成図である。図2は、本実施形態に係る運動支援装置に適用される各構成を示す概略ブロック図である。図2(a)はセンサ機器の構成を示す概略ブロック図であり、図2(b)はリスト機器の構成を示す概略ブロック図であり、図2(c)は情報処理端末の構成を示す概略ブロック図である。
次に、本実施形態に係る運動支援装置における制御方法(運動支援方法)について、図面を参照して説明する。ここでは、本実施形態に係るセンサ機器100における運動中のセンサデータの収集から、仮走行軌跡の作成、地図データ(トレーニングコース)へのマッチング、ユーザUSへの運動データの提供までの、一連の制御処理について説明する。
図4は、本実施形態に係る運動支援方法における個人特性評価モードにおいて実行される制御処理の一例を示すフローチャートであり、図5は、本実施形態に係る個人特性評価モードに適用される説明情報の一例を示す図である。
(IDa)ランニング動作におけるユーザの身体の上下動の、1周期内の最大値
(IDb)加速度の2乗の1周期内の平均値(加速度力積)
(IDc)加速度の進行方向成分の2乗の1周期内の平均値(前進方向力積)
(IDd)ユーザの脚の接地時間の値
(IDe)ユーザの身体の鉛直軸回りの振れ角の、1周期内の最大値(骨盤振れ角/ヨー)
(IDf)ユーザの身体を横に貫く軸回りの振れ角の、1周期内の最大値(骨盤振れ角/ピッチ)
移動速度の比率 = a × Val + b ・・・(1)
なお、本実施形態においては、計算を簡単にするために1次式を用いて近似する場合について示したが、2次式、3次式を用いて近似することも可能である。なお、式の次数を上げる場合にはデータ量が多いことが好ましい。
移動距離 = 移動速度×移動時間 ・・・(2)
ストライドは、移動距離と歩数に対して、次の(3)式の関係を有している。
ストライド = 移動距離/歩数 ・・・(3)
上記(2)、(3)式から、移動速度の比率に対応するストライドの比率は、次の(4)式の関係を有している。
ストライドの比率 =(a × Val + b)×移動時間/歩数 ・・・(4)
次に、本実施形態に係るトレーニングモードについて説明する。
図9は、本実施形態に係る運動支援方法におけるトレーニングモードにおいて実行される制御処理の一例を示すフローチャートである。図9(a)は、本実施形態に係るトレーニングモードにおいて実行される仮走行軌跡作成処理の一例を示すフローチャートであり、図9(b)は、本実施形態に係るトレーニングモードにおいて実行されるコースマッチング処理の一例を示すフローチャートである。図10は、本実施形態に係る仮走行軌跡作成処理を説明するための概念図である。図11は、本実施形態に係るコースマッチング処理を説明するための概念図である。
Lx =(a × Val + b)×移動時間 ・・・(5)
La = K×Lx ・・・(6)
これにより、上記の係数a、bを、(7)式のように補正する。
a′= K×a、 b′= K×b ・・・(7)
次に、本実施形態に係るレースモードについて説明する。
図12は、本実施形態に係る運動支援方法におけるレースモードにおいて実行される制御処理の一例を示すフローチャートある。図13は、本実施形態に係るレースモードにおけるレースコースの一例を示す図である。
図14は、本実施形態に係る運動支援装置の変形例を示す概略構成図である。
上述した実施形態においては、センサ機器100において、運動中のセンサデータの収集や運動状態に関する各種データの推定、仮走行軌跡の作成の一連の処理を実行し、情報処理端末300において、仮走行軌跡をコースに一致させるマッチング処理や、その結果(設定された補正係数)に基づいてピッチや走行速度、補正ストライド等の運動データを計算して表示する処理を実行する場合について説明した。本発明はこれに限定されるものではなく、例えば図14に示すように、運動支援装置がネットワークに接続されたサーバ機器500やクラウドシステムを備えているものであってもよい。そして、運動後にセンサ機器100から送信されたセンサデータや仮走行軌跡を、情報処理端末300やネットワーク中継機器400を介してサーバ機器500に転送して、サーバ機器500において、上述した仮走行軌跡のコースマッチングや運動データの計算等の処理を実行するものであってもよい。
以下に、本願出願の当初の特許請求の範囲に記載された発明を付記する。
[1]
利用者の身体に装着されて前記利用者の身体の動作状態に関するセンサデータを取得するセンサ部と、
前記利用者が周期的に足を動かして、予め設定された試験区間を移動した際に前記センサ部により取得される第1のセンサデータに基づく複数の運動指標のうちの、前記利用者の移動速度に対する相関が最も強いものを特定の運動指標として選択し、前記移動速度を前記特定の運動指標と係数を用いる近似式で表すときの前記係数を算出する運動指標選択部と、
前記利用者が周期的に足を動かして所定の移動経路を移動している間に前記センサ部により取得される第2のセンサデータと、前記特定の運動指標と、前記係数とに基づいて、前記運動中の前記利用者の歩幅を推定するための仮歩幅を前記運動中に推定する仮歩幅推定部と、
前記移動経路における前記第2のセンサデータに基づいて前記利用者の位置を特定することが可能な、互いに異なる第1地点と第2地点とにおいて、前記第2のセンサデータに基づいて第1時刻に前記利用者が前記第1地点にいて第2時刻に前記利用者が前記第2地点にいることが検知されるときに、前記第1時刻と前記第2時刻との間に前記利用者が前記仮歩幅に基づいて移動したと推定される仮移動距離を、前記移動経路における前記第1地点と前記第2地点との間の距離に一致するように補正する補正係数を設定する補正係数設定部と、
前記補正係数に基づいて前記仮歩幅を補正した補正歩幅を前記運動中に算出する補正歩幅算出部と、
を有することを特徴とする運動支援装置。
前記補正係数設定部は、前記補正係数を、前記1地点と前記第2地点との間の距離を前記仮移動距離で除算した値に設定することを特徴とする[1]に記載の運動支援装置。
前記移動経路における前記第1及び第2の地点は、前記移動経路が屈曲している地点であり、
前記補正係数設定部は、前記センサデータのうち、前記利用者に対する鉛直軸回りの角速度の変化に基づいて、前記利用者が前記移動経路における前記第1及び第2の地点にいることを検知することを特徴とする[1]又は[2]に記載の運動支援装置。
前記仮歩幅と前記第2のセンサデータとに基づいて、前記移動経路を移動中の前記利用者の移動軌跡を仮移動軌跡として前記運動中に推定する移動軌跡推定部を有し、
前記補正係数設定部は、前記仮移動軌跡に基づいて前記仮移動距離を推定することを特徴とする[1]乃至[3]のいずれかに記載の運動支援装置。
更に、前記センサ部により収集された前記センサデータのうち、前記利用者に対する鉛直軸回りの角速度の積分値に基づいて、前記運動中の前記利用者の進行方向を求めるための仮進行方向を推定する進行方向推定部を有し、
前記移動軌跡推定部は、前記仮歩幅と前記仮進行方向とに基づいて、前記仮移動軌跡を推定することを特徴とする[4]に記載の運動支援装置。
更に、前記算出された前記補正歩幅に基づく情報を、前記移動経路に関連付けて前記利用者に運動データとして提供する運動データ提供部を備えることを特徴とする[1]乃至[5]のいずれかに記載の運動支援装置。
前記センサ部は、前記利用者の身体の体幹に装着されたモーションセンサを有し、
前記センサデータは、前記モーションセンサにより収集された、前記運動中の加速度及び角速度を含むことを特徴とする[1]乃至[6]のいずれかに記載の運動支援装置。
前記複数の運動指標は、前記運動中の前記利用者の身体の上下動の、前記運動における1周期内の最大値、前記運動における前記加速度の2乗の、前記運動における1周期内の平均値、前記運動における前記加速度の進行方向成分の2乗の、前記運動における1周期内の平均値、前記運動における前記利用者の脚の接地時間の値、前記運動中の前記利用者の身体の鉛直軸回りの振れ角の、前記運動における1周期内の最大値、及び、前記運動における前記利用者の身体を横に貫く軸回りの振れ角の、前記運動における1周期内の最大値、のいずれかを含むことを特徴とする[7]に記載の運動支援装置。
利用者が周期的に足を動かして、予め設定された試験区間を移動した際に前記利用者の身体に装着されたセンサ部により取得される前記利用者の身体の動作状態に関する第1のセンサデータに基づく前記複数の運動指標のうちの、前記利用者の移動速度に対する相関が最も強いものを特定の運動指標として選択するとともに、前記移動速度を前記特定の運動指標と係数を用いる近似式で表すときの前記係数を算出し、
前記利用者が周期的に足を動かして所定の移動経路を移動している間に前記センサ部により取得される第2のセンサデータと、前記特定の運動指標と、前記係数とに基づいて、前記運動中の前記利用者の歩幅を推定するための仮歩幅を前記運動中に推定し、
前記移動経路における前記第2のセンサデータに基づいて前記利用者の位置を特定することが可能な、互いに異なる第1地点と第2地点とにおいて、前記第2のセンサデータに基づいて第1時刻に前記利用者が前記第1地点にいて第2時刻に前記利用者が前記第2地点にいることが検知されるときに、前記第1時刻と前記第2時刻との間に前記利用者が前記仮歩幅に基づいて移動したと推定される仮移動距離を、前記移動経路における前記第1地点と前記第2地点との間の距離に一致するように補正する補正係数を設定し、
前記補正係数に基づいて前記仮歩幅を補正した補正歩幅を前記運動中に算出する、
ことを特徴とする運動支援方法。
コンピュータに、
利用者が周期的に足を動かして、予め設定された試験区間を移動した際に前記利用者の身体に装着されたセンサ部により取得される前記利用者の身体の動作状態に関する第1のセンサデータに基づく前記複数の運動指標のうちの、前記利用者の移動速度に対する相関が最も強いものを特定の運動指標として選択させるとともに、前記移動速度を前記特定の運動指標と係数を用いる近似式で表すときの前記係数を算出させ、
前記利用者が周期的に足を動かして所定の移動経路を移動している間に前記センサ部により取得される第2のセンサデータと、前記特定の運動指標と、前記係数とに基づいて、前記運動中の前記利用者の歩幅を推定するための仮歩幅を前記運動中に推定させ、
前記移動経路における前記第2のセンサデータに基づいて前記利用者の位置を特定することが可能な、互いに異なる第1地点と第2地点とにおいて、前記第2のセンサデータに基づいて第1時刻に前記利用者が前記第1地点にいて、第2時刻に前記利用者が前記第2地点にいることが検知されるときに、前記第1時刻と前記第2時刻との間に前記利用者が前記仮歩幅に基づいて移動したと推定される仮移動距離を、前記移動経路における前記第1地点と前記第2地点との間の距離に一致するように補正する補正係数を設定させ、
前記補正係数に基づいて前記仮歩幅を補正した補正歩幅を前記運動中に算出させる、
ことを特徴とする運動支援プログラム。
110 加速度計測部
120 角速度計測部
130 軸補正部
140 記憶部
150 信号処理部
160 制御部
170 通信I/F部
200 リスト機器
210 入力操作部
220 表示部
240 記憶部
260 制御部
270 通信I/F部
300 情報処理端末
310 入力操作部
320 表示部
340 記憶部
350 走行軌跡解析部
360 制御部
370 通信I/F部
400 ネットワーク中継機器
500 サーバ機器
US ユーザ
Claims (14)
- 利用者の身体に装着されるモーションセンサを有し、前記利用者が足を動かして移動する運動を行っているときに、前記モーションセンサより、前記利用者の身体の動作状態に関するデータを出力するセンサ部と、
前記データに基づいて、前記利用者の運動状態に関する運動データを算出する制御部と、を備え、
前記制御部は、
前記運動により、互いに異なる複数の移動速度の各々で予め設定された区間を前記利用者が移動したときに前記モーションセンサより出力される第1のデータに基づいて、予め設定された複数の運動指標を算出し、
前記複数の運動指標のうちの、前記複数の移動速度の相互の比率に対する相関が相対的に強いものを特定の運動指標として選択し、
前記比率を、前記特定の運動指標を変数とする近似式で表すときの係数を算出し、
前記利用者が前記運動により前記区間と異なる経路を移動したときに、前記特定の運動指標、前記経路の実際の距離及び前記係数に基づいて前記運動データを算出することを特徴とする運動支援装置。 - 前記制御部は、
前記利用者が前記区間を、前記移動速度を互いに異ならせて前記区間を少なくとも3回移動したときに前記モーションセンサより出力される前記データを、前記第1のデータとして取得し、
前記複数の運動指標を、互いに異なる前記複数の移動速度のそれぞれに対して算出することを特徴とする請求項1に記載の運動支援装置。 - 前記制御部は、
前記運動により前記区間と異なる前記経路を前記利用者が移動したときの前記利用者の歩幅の推定値を、前記運動データとして、前記特定の運動指標、前記経路の実際の距離及び前記係数に基づいて、前記利用者が前記運動を行っているときに算出することを特徴とする請求項1又は2に記載の運動支援装置。 - 前記制御部は、
前記利用者が前記運動により前記経路を移動しているときに前記モーションセンサより出力される第2のデータと、前記特定の運動指標と、前記係数とに基づいて、前記利用者の前記移動動作中の仮歩幅を推定し、
前記第2のデータに基づいて、前記利用者が、前記経路における、前記利用者の位置を特定することが可能な、互いに異なる2つの特定地点の間の移動に要した移動時間を取得し、
前記移動時間と前記仮歩幅に基づいて、前記移動時間に前記利用者が移動したと推定される仮移動距離を算出し、
前記仮移動距離を補正する補正係数を、補正後の前記仮移動距離を前記経路における前記2つの特定地点の間の実際の距離に一致させる値に設定し、
前記補正係数に基づいて、前記歩幅の推定値を算出することを特徴とする請求項3に記載の運動支援装置。 - 前記2つの特定地点は、前記経路が屈曲している箇所であり、
前記第2のデータは、前記利用者の鉛直軸回りの角速度を示す角速度データを含み、
前記制御部は、
前記角速度データにより検出される前記利用者の鉛直軸回りの前記角速度の変化に基づいて、前記利用者が前記経路の前記2つの特定地点にいると判断される2つの時刻を検知し、
前記2つの時刻に基づいて、前記移動時間を取得することを特徴とする請求項4に記載の運動支援装置。 - 前記制御部は、
前記利用者が前記運動により前記経路を移動しているときに前記モーションセンサより出力される第2のデータと、前記特定の運動指標と、前記係数とに基づいて、前記利用者の前記移動動作中の仮歩幅を推定し、
前記仮歩幅と前記第2のデータとに基づいて、前記経路を移動中の前記利用者の移動軌跡を、仮移動軌跡として、前記利用者が前記運動を行っているときに順次作成し、
前記第2のデータに基づいて、前記利用者が、前記経路における、前記利用者の位置を特定することが可能な特定地点に到達したと判定したときに、前記仮移動軌跡を補正する補正係数を、補正後の前記仮移動軌跡を前記特定地点に一致させるように補正する値に設定し、
前記仮歩幅を前記補正係数により補正した補正歩幅を、前記歩幅の推定値として、前記利用者が前記運動を行っているときに算出することを特徴とする請求項3又は4に記載の運動支援装置。 - 前記特定地点は、前記経路が屈曲している箇所であり、
前記第2のデータは、前記利用者の鉛直軸回りの角速度を示す角速度データを含み、
前記制御部は、前記角速度データにより検出される前記利用者の鉛直軸回りの前記角速度の変化に基づいて、前記利用者が前記経路の前記特定地点に到達したか否かを判定することを特徴とする請求項6に記載の運動支援装置。 - 前記第2のデータは、前記利用者の鉛直軸回りの角速度を示す角速度データを含み、
前記制御部は、
前記角速度データにおける前記利用者の鉛直軸回りの前記角速度の積分値に基づいて、前記運動中の前記利用者の進行方向を求めるための仮進行方向を取得し、
前記仮歩幅と前記仮進行方向とに基づいて、前記仮移動軌跡を作成することを特徴とする請求項6に記載の運動支援装置。 - 前記運動データを前記経路の情報に関連付けて前記利用者に提供する、運動データ提供部を備えることを特徴とする請求項1乃至8のいずれかに記載の運動支援装置。
- 前記モーションセンサは、加速度及び角速度を検出し、
前記データは、前記モーションセンサより検出される前記加速度及び前記角速度に対応した、加速度データ及び角速度データを含むことを特徴とする請求項1乃至9のいずれかに記載の運動支援装置。 - 前記複数の運動指標は、前記加速度データ及び前記角速度データの少なくとも何れか一方を用いて算出される、
(i)前記運動における前記利用者の身体の上下動の、前記運動における1周期内の最大値、
(ii)前記運動における前記加速度の2乗の、前記運動における1周期内の平均値、
(iii)前記運動における前記加速度の進行方向成分の2乗の、前記運動における1周期内の平均値、
(iv)前記運動における前記利用者の脚の接地時間の値、
(v)前記運動における前記利用者の身体の鉛直軸回りの振れ角の、前記運動における1周期内の最大値、及び、
(vi)前記運動における前記利用者の身体を横に貫く軸回りの振れ角の、前記運動における1周期内の最大値、
のいずれかを含むことを特徴とする請求項10に記載の運動支援装置。 - 利用者が足を動かして移動する運動を行いながら、互いに異なる複数の移動速度の各々で予め設定された区間を移動したときに、前記利用者の身体に装着されているモーションセンサより出力される第1のデータに基づいて、予め設定された複数の運動指標を算出する工程と、
前記複数の運動指標のうちの、前記複数の移動速度の相互の比率に対する相関が相対的に強いものを特定の運動指標として選択する工程と、
前記比率を、前記特定の運動指標を変数とする近似式で表すときの係数を算出する工程と、
前記利用者が前記運動により前記区間と異なる経路を移動したときに、前記特定の運動指標、前記経路の実際の距離及び前記係数に基づいて、前記利用者の運動状態に関する運動データを算出する工程と、
を含むことを特徴とする運動支援方法。 - コンピュータに、
利用者が足を動かして移動する運動を行いながら、互いに異なる複数の移動速度の各々で予め設定された区間を移動したときに、前記利用者の身体に装着されているモーションセンサにより出力される第1のデータに基づいて、予め設定された複数の運動指標を算出させ、
前記複数の運動指標のうちの、前記複数の移動速度の相互の比率に対する相関が相対的に強いものを特定の運動指標として選択させ、
前記比率を、前記特定の運動指標を変数とする近似式で表すときの係数を算出させ、
前記利用者が前記運動により前記区間と異なる経路を移動したときに、前記特定の運動指標、前記経路の実際の距離及び前記係数に基づいて、前記利用者の運動状態に関する運動データを算出させる、
ことを特徴とする運動支援プログラム。 - 足を動かして移動する運動を行っている利用者の運動状態に関する運動データを算出する制御部を備え、
前記制御部は、
前記利用者が前記運動により互いに異なる複数の移動速度の各々で予め設定された区間を移動したときに前記利用者の身体に装着されているモーションセンサより出力される第1のデータに基づいて、予め設定された複数の運動指標を算出し、
前記複数の運動指標のうちの、前記複数の移動速度の相互の比率に対する相関が相対的に強いものを特定の運動指標として選択し、
前記比率を、前記特定の運動指標を変数とする近似式で表すときの係数を算出し、
前記利用者が前記運動により前記区間と異なる経路を移動したときに、前記特定の運動指標、前記経路の実際の距離及び前記係数に基づいて前記運動データを算出することを特徴とする運動支援装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014191814A JP6183716B2 (ja) | 2014-09-19 | 2014-09-19 | 運動支援装置及び運動支援方法、運動支援プログラム |
| US14/855,193 US11291388B2 (en) | 2014-09-19 | 2015-09-15 | Exercise support device, exercise support method and storage medium |
| CN201510593872.8A CN105435436B (zh) | 2014-09-19 | 2015-09-17 | 运动支援装置、运动支援方法及计算机可读取的记录介质 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014191814A JP6183716B2 (ja) | 2014-09-19 | 2014-09-19 | 運動支援装置及び運動支援方法、運動支援プログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016059711A JP2016059711A (ja) | 2016-04-25 |
| JP6183716B2 true JP6183716B2 (ja) | 2017-08-23 |
Family
ID=55524642
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014191814A Active JP6183716B2 (ja) | 2014-09-19 | 2014-09-19 | 運動支援装置及び運動支援方法、運動支援プログラム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11291388B2 (ja) |
| JP (1) | JP6183716B2 (ja) |
| CN (1) | CN105435436B (ja) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102225400B1 (ko) | 2014-12-04 | 2021-03-09 | 삼성전자주식회사 | 웨어러블 디바이스 및 웨어러블 디바이스에서 메시지를 전송하는 방법 |
| US20170086671A1 (en) * | 2015-09-25 | 2017-03-30 | Zimmer, Inc. | Intelligent orthopedic apparatus, systems, and methods |
| JP2017136142A (ja) * | 2016-02-02 | 2017-08-10 | セイコーエプソン株式会社 | 情報端末、動作評価システム、動作評価方法、動作評価プログラム、及び記録媒体 |
| JP6686985B2 (ja) * | 2017-08-03 | 2020-04-22 | カシオ計算機株式会社 | 軌跡推定装置、軌跡推定方法及び軌跡推定プログラム |
| JP6889923B2 (ja) * | 2017-09-19 | 2021-06-18 | 国立大学法人 宮崎大学 | 歩幅推定装置および歩幅推定プログラム |
| JP7031234B2 (ja) * | 2017-11-08 | 2022-03-08 | カシオ計算機株式会社 | 走行データ表示方法、走行データ表示装置及び走行データ表示プログラム |
| JP7095525B2 (ja) | 2018-03-20 | 2022-07-05 | カシオ計算機株式会社 | 携帯端末、運動支援方法およびプログラム |
| US10492735B2 (en) * | 2018-04-27 | 2019-12-03 | Microsoft Technology Licensing, Llc | Intelligent warning system |
| KR102150973B1 (ko) * | 2019-05-22 | 2020-09-02 | 포항공과대학교 산학협력단 | 운동 정보 제공 방법 및 장치 |
| CN111110247B (zh) * | 2020-01-13 | 2023-05-26 | 广东高驰运动科技股份有限公司 | 运动数据指标的监测方法及监测装置 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3008184B2 (ja) | 1996-10-16 | 2000-02-14 | セイコーインスツルメンツ株式会社 | 携帯型gps受信装置 |
| US6571200B1 (en) * | 1999-10-08 | 2003-05-27 | Healthetech, Inc. | Monitoring caloric expenditure resulting from body activity |
| JP2005224349A (ja) * | 2004-02-12 | 2005-08-25 | Intelligent Cosmos Research Institute | 移動速度推定装置、移動速度推定方法および移動速度推定プログラム |
| CN100409809C (zh) * | 2004-07-21 | 2008-08-13 | 松下电工株式会社 | 体力活动测量系统 |
| US7827000B2 (en) * | 2006-03-03 | 2010-11-02 | Garmin Switzerland Gmbh | Method and apparatus for estimating a motion parameter |
| US7467060B2 (en) * | 2006-03-03 | 2008-12-16 | Garmin Ltd. | Method and apparatus for estimating a motion parameter |
| US7647196B2 (en) * | 2007-08-08 | 2010-01-12 | Dp Technologies, Inc. | Human activity monitoring device with distance calculation |
| JP4877395B2 (ja) * | 2010-01-19 | 2012-02-15 | セイコーエプソン株式会社 | 歩幅推測方法及び歩幅推測装置 |
| KR101605999B1 (ko) * | 2010-11-01 | 2016-03-23 | 나이키 이노베이트 씨.브이. | 운동 기능을 가지는 착용가능한 장치 조립체 |
| KR101549761B1 (ko) * | 2010-11-05 | 2015-09-02 | 나이키 이노베이트 씨.브이. | 자동화된 개인 훈련 방법 및 시스템 |
| US9737261B2 (en) * | 2012-04-13 | 2017-08-22 | Adidas Ag | Wearable athletic activity monitoring systems |
| JP2014006090A (ja) * | 2012-06-22 | 2014-01-16 | Seiko Epson Corp | 携帯型機器 |
| JP2014038037A (ja) * | 2012-08-16 | 2014-02-27 | Ricoh Co Ltd | 位置情報管理システム及び位置推定プログラム |
| US9116000B2 (en) * | 2012-10-22 | 2015-08-25 | Qualcomm, Incorporated | Map-assisted sensor-based positioning of mobile devices |
| WO2014089238A1 (en) * | 2012-12-04 | 2014-06-12 | Mapmyfitness, Inc. | Gait analysis system and method |
| JP6103350B2 (ja) * | 2012-12-18 | 2017-03-29 | カシオ計算機株式会社 | 運動支援装置、運動支援方法および運動支援プログラム |
| JP6063743B2 (ja) * | 2012-12-28 | 2017-01-18 | セイコーインスツル株式会社 | 電子機器及びプログラム |
-
2014
- 2014-09-19 JP JP2014191814A patent/JP6183716B2/ja active Active
-
2015
- 2015-09-15 US US14/855,193 patent/US11291388B2/en active Active
- 2015-09-17 CN CN201510593872.8A patent/CN105435436B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US11291388B2 (en) | 2022-04-05 |
| CN105435436B (zh) | 2018-01-12 |
| CN105435436A (zh) | 2016-03-30 |
| US20160081612A1 (en) | 2016-03-24 |
| JP2016059711A (ja) | 2016-04-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6183716B2 (ja) | 運動支援装置及び運動支援方法、運動支援プログラム | |
| US10684304B2 (en) | Foot exercise motion analysis device during moving exercise | |
| CN105388495B (zh) | 估计体育锻炼中的局部运动 | |
| EP2947588B1 (en) | Method for calculating the activity of a user | |
| US10289902B2 (en) | Data analysis device, data analysis method and storage medium | |
| CN109579853B (zh) | 基于bp神经网络的惯性导航室内定位方法 | |
| US8913134B2 (en) | Initializing an inertial sensor using soft constraints and penalty functions | |
| EP2910901B1 (en) | Method for determining an instant velocity of a user and for improving estimation of heart rate | |
| JP5505812B2 (ja) | 所要時間算出システム、所要時間算出プログラム及び所要時間算出方法 | |
| EP2165203B1 (en) | Method and device for measuring the progress of a moving person | |
| JP5754051B2 (ja) | 移動要素に剛結合された3軸加速度計の連続的な位置により形成された経路の特徴を決定する装置、システムおよび方法 | |
| JP6565369B2 (ja) | 運動支援装置及び運動支援方法、運動支援プログラム | |
| CN104436596A (zh) | 运动支持装置及运动支持方法 | |
| CN104296750A (zh) | 一种零速检测方法和装置以及行人导航方法和系统 | |
| JP6421475B2 (ja) | データ解析装置及びデータ解析方法、データ解析プログラム | |
| Chen et al. | Sensing strides using EMG signal for pedestrian navigation | |
| WO2015044666A2 (en) | Selecting routes | |
| JP5892305B2 (ja) | 活動量計測装置、活動量計測システム、プログラム及び記録媒体 | |
| JP7243113B2 (ja) | 距離算出装置、距離算出方法及び距離算出プログラム | |
| CN106574830B (zh) | 使用软约束和惩罚函数初始化惯性传感器 | |
| Biswas et al. | Validity and reliability of Polar v800 smart watch to measure cricket-specific movements | |
| JP2016010544A (ja) | データ解析装置及びデータ解析方法、データ解析プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20161121 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20161130 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170112 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170630 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170713 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6183716 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |