JP6179940B2 - ドップラーイメージング信号送信装置、ドップラーイメージング信号受信装置、ドップラーイメージングシステム及び方法 - Google Patents
ドップラーイメージング信号送信装置、ドップラーイメージング信号受信装置、ドップラーイメージングシステム及び方法 Download PDFInfo
- Publication number
- JP6179940B2 JP6179940B2 JP2013146637A JP2013146637A JP6179940B2 JP 6179940 B2 JP6179940 B2 JP 6179940B2 JP 2013146637 A JP2013146637 A JP 2013146637A JP 2013146637 A JP2013146637 A JP 2013146637A JP 6179940 B2 JP6179940 B2 JP 6179940B2
- Authority
- JP
- Japan
- Prior art keywords
- signal
- multicarrier
- doppler
- log step
- doppler imaging
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images


















Description
上記対称のログステップマルチキャリア信号を対象物体に放射したときに、当該対象物体からの反射信号を受信し、受信した反射信号と、上記放射した対称のログステップマルチキャリア信号とに基づいてドップラーイメージングの計測処理を行うことにより、上記対象物体の位置及び速度の少なくとも一方を計測して画像化する信号処理手段を備えたことを特徴とする。
所定の窓関数信号を所定の距離方向で遅延してなる信号と、上記受信した反射信号とに対して、周波数領域での畳み込み演算又は時間領域での乗算を行い、演算結果の信号と上記放射した対称のログステップマルチキャリア信号とを比較して周波数軸上の偏差を概算速度推定値として演算する概算速度推定部と、
上記概算速度推定部により演算される概算速度推定値と、上記相互相関係数とをインデックスとして予め計算された詳細速度推定値を格納する詳細速度テーブルを含む記憶装置を含み、上記インデックスを上記記憶装置に入力することで出力される詳細速度推定値と、上記概算速度推定値とに基づいて上記対象物体の速度を演算する詳細速度推定部とを備えたことを特徴とする。
指数関数間隔で配置された複数の周波数を有するマルチキャリア信号であるログステップマルチキャリア信号と同一の2つのログステップマルチキャリア信号を発生し、当該2つのログステップマルチキャリア信号を、時間軸上で原点を中心として前後逆向きに連結することで、原点に対して対称のログステップマルチキャリア信号を発生して送信信号として対象物体に送信するステップと、
上記対称のログステップマルチキャリア信号を対象物体に放射したときに、当該対象物体からの反射信号を受信し、受信した反射信号と、上記放射した対称のログステップマルチキャリア信号とに基づいてドップラーイメージングの計測処理を行うことにより、上記対象物体の位置及び速度の少なくとも一方を計測して画像化するステップとを含むことを特徴とする。
1.1 ドップラー偏移量
一般に、音波を反射する対象物体(以下、反射物体という。)が運動していると、ドップラー効果により反射信号の周波数が変化する。また、それは周波数に対して乗法的に作用する。ドップラーイメージング信号を発生する信号送信装置と、当該ドップラーイメージング信号が反射物体により反射されてその反射信号を受信する信号受信装置との位置を固定し、運動する反射物体の速度を計測する場合、当該反射物体の運動速度をvとし、音速をcとし、当該反射物体の運動方向と音波の進行方向がなす角度をθとすると、ドップラーイメージング送信信号の周波数fと、その受信信号の周波数をf’との間に次式の関係が成り立つ。

ドップラーイメージングの代表例は、医用超音波におけるカラードップラー法(Dモード画像)である。アルゴリズムの定式化が早くから与えられ、その能力と限界についての研究が行われてきた。
2.1 提案の動機
上述したように、キャリア周波数間隔を等ステップにとったマルチキャリア信号であるOFDM(Orthogonal Frequency Divisional Multiplexing)信号はイメージングに有効であるが(例えば、特許文献1参照)、動く物体に適用すると、ドップラー偏移によって各キャリアの直交性が失われ、特定速度の物体画像が消失するなどイメージング精度が劣化する。本発明に係る本実施形態では、送信信号として隣接するキャリア周波数が一定比を持つログステップマルチキャリア信号からさらに改善された、図5及び図6を参照して詳細後述する「対称のログステップマルチキャリア信号」を用いる。基礎信号となるログステップマルチキャリア信号は周波数軸を対数間隔にとるとキャリアは等間隔に並ぶので、このように命名した。すなわち、ログステップマルチキャリア信号はその複数のキャリア信号の周波数間隔を指数間隔にとった信号である。
ログステップマルチキャリア信号は複数のキャリアからなる信号で、隣接するキャリア周波数が定数比を持つものである。次式によって標準形が与えられる。
図1は基礎信号である整列位相ログステップマルチキャリア信号のプロファイル及び包絡線を示すグラフである。広帯域バースト波を用いる音響イメージングでは、パルス圧縮すなわち参照信号との相互相関演算によって到来時刻の鋭いピークを再構成する。しかしドップラー偏移を伴う移動物体からの反射波については、相互相関のピークは減少し、その検出能力を損ねる。検出波に整列位相ログステップマルチキャリア信号を用いた場合には、ドップラー偏移によるピーク減少は比較的軽微であるのみならず、相互相関値がドップラー偏移に対して独特な振る舞いをするため(微細構造の生成)、高精度な速度検出が可能となる。
相互相関プロファイルの極大値を繋げた包絡線を求めてみる。整列位相ログステップマルチキャリア信号の包絡線は、一致するキャリアの個数がドップラー偏移量に従って減少するため、ρ=1を頂点とする山形の三角形となる。加えてドップラー偏移は信号長にも影響を与えるため、包絡線はその影響も反映したものとなっている。
ログステップマルチキャリア信号の有用な性質である微細構造やならだかに逓減する包絡線の出現は、各キャリアの初期位相がすべてそろうように、すなわち初期時刻T0=0に選んだとき、最も顕著に現れる。しかし、そのようにすると、全キャリアの位相のそろう時点で、時間波形の波高値に顕著なピークが生成する。これは一定の平均電力を送信するのに大きなピーク電力の送信を要すことになり、送信機の設計を困難にする。一方、|T0|>T(2Tはバースト長)にするとそのピークは現れなくなり、比較的良好なピーク対平均比を実現できる。これは送信を容易にするが、ログステップマルチキャリア信号の利点を損なうものとなる。その利点を保つT0の限界を議論するため、次の関係式を求めることができる。
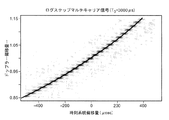
図4はログステップマルチキャリア信号(初期時刻T0=3000μs)のドップラー偏移による系統偏移を示すグラフである。図4に示すように、整列位相ログステップマルチキャリア信号の初期時刻T0を0以外の値に設定すると、相互相関のピークを与える時刻に系統偏移が現れる。初期時刻T0<0を与えると、相互相関ピーク時刻は反射物体が近づく場合により早く現れるようになり、一方初期時刻をT0>0とすると、反射物体が近づく場合により遅く現れる。これは反射波を画像化したとき、物体の検出位置の誤差となるため、厳密に議論しておく必要がある。その誤差(偏移)は次式により求められる。ドップラー偏移量をρとしたとき、整列位相ログステップマルチキャリア信号g(t)=gp,q(t,T0)の相互相関<g|Dρg>(t)は、次の時刻t0=γg(ρ)にピークを持つ。ここで、T0=3000μsである。
次いで、本発明に係る実施形態において解決すべき課題及び解決方法について以下に説明する。
図6は本実施形態に係る対称整列位相ログステップマルチキャリア信号の信号波形を示す波形図である。
パルス圧縮では、参照信号(送信信号)と受信信号の間で相関演算をすることで、反射波の鋭いピークを再構成する。しかし受信信号はドップラー偏移の影響を受けているため、ドップラー偏移量によっては、プロファイル微細構造の影響で、相関関数ピークが減少し、あるいはまったく得られない場合がある。そこで、プロファイルの微細構造の間を埋めるため、あらかじめ周波数シフトさせた参照信号を複数用意し、それらとの相関計算を行うことによって、これを補うことにする。送信信号gp,q(t,T0)からわずかに周波数をシフトさせた次式の3種の参照信号を用意する。
詳細後述するドップラー偏移量推定では、それに先立ってドップラー偏移量の概算値を知ることが必要になる。ドップラー偏移量の概算値は例えば次式のように求める。しきい値Hを適当に定め、受信信号s(t)のフーリエ変換Fs(f)からスペクトルの上限値f1と下限値f2を得る。
ドップラー偏移量はパルス圧縮の適用の結果得られたピーク値x=(xR,xG,xB)を用いて推定する。
図10は本発明の一実施形態に係るドップラーイメージングシステムの構成を示すブロック図である。また、図11Aは図10のドップラーイメージング信号送信装置1の構成を示すブロック図であり、図11Bは図11Aの変形例であるドップラーイメージング信号送信装置1Aの構成を示すブロック図である。さらに、図12は図10のドップラーイメージング信号受信装置2の構成を示すブロック図である。
本実施形態による図10のドップラーイメージングシステムの性能を、従来技術のカラードップラー法と対照することで確認した。比較対象のカラードップラー法は中心周波数42.535kHz、継続時間0.2msのインパルス波形を4ms間隔で発生させ、使用した。信号帯域内で一定のSN比になるようノイズを注入した。
以上説明したように、本発明の実施形態によれば、対称ログステップマルチキャリア信号をドップラーレーダーあるいはドップラーイメージングに使用すると、従来波形が移動物体について検出位置を誤った欠点を解消し、移動物体の速度を高精度に検出でき、かつ移動物体についても検出位置を誤らないという効果を有する。
(1)はじめに
対称整列マルチキャリア信号に生じる相関ピークの位置はその信号がドップラー偏移を受けても移動しない。その事実をフーリエ変換により証明する。なお、この証明では、実関数f(t)のフーリエ変換F(ω)=Ft(f)において、その左辺の実数部及び虚数部をF(ω)=A(ω)+jB(ω)とおいたとき、A(ω)は偶関数(A(−ω)=A(ω))となり、B(ω)は奇関数(B(−ω)=−B(ω))となる事実を用いる。
超音波イメージング装置又はレーダー装置では、反射物体を位置検出のために、次式の相互相関係数r(τ)で表すように送信信号f(t)を照射して信号g(t)を受信する。
ドップラー偏移のない場合(ρ=1)、相互相関係数r(τ)は必ずτ=0に最大ピークをもつ。これは送信信号f(t)の電力値を表す。しかし、ドップラー偏移のもとでは、一般に相互相関係数r(τ)のピークはτ=0から正の方向に移動してしまう。レーダー装置としては、反射物体の位置を誤って検出することになり、対策を必要とする。
(4)相関ピークの定式化
相関ピークは相互相関係数r(τ)の極値であるため、ここで、dr(τ)/dτ=0となる。フーリエ変換では、微分演算は−jωを乗算する演算なので、q(τ)=dr/dτのフーリエ変換は次式で表される。
ρ≠1の場合、一般には、式(37)に相当する関係式qρ(0)≠0である。すなわち、相関ピークは計測誤差のために、τ=0に留まっておらず、移動してしまう。それは、F(ω/ρ)F(ω)*が角周波数ωの偶関数にならないためである。逆に、F(ω/ρ)F(ω)*を偶関数とできれば、ドップラー偏移下でピークの移動(計測誤差の発生)を防止できる。そのような送信信号f(t)は次式のように構成できる。
実関数f(t)が偶関数であると、そのフーリエ変換F(ω)=A(ω)は虚数部をもたず、すなわち、実の偶関数となる。よって、次式も偶関数である。
上述と同様に、実関数f(t)が奇関数であると、F(ω)=jB(ω)であるので次式を得る。
超音波イメージング装置又はレーダー装置の検出信号を時間の偶関数ないし奇関数にとると、物体検出のピーク移動がないことを証明した。偶関数ならば信号は線対称となり、奇関数ならば信号は点対称となり、そのような信号波形を使用するのが、対称の整列ログステップマルチキャリア信号を用いたイメージング計測のアイデアである。なお、この信号波形はピーク移動を生じない条件の十分条件であり、必要条件ではない。すなわち、他の信号波形でも同様の性質を持ちうる。しかし、計測システムで信号波形のスペクトルが変化してもその性質を保持するものとしては、信号波形を偶関数ないし奇関数にとるのはベストであると考える。
2…ドップラーイメージング信号受信装置、
3…超音波スピーカ、
4…マイクロホンアレイ、
4m…受信信号メモリ、
5…表示装置、
6…反射物体、
10…タイミングコントローラ、
11…送信信号発生器、
11A…基礎信号発生器、
11R…読み出し専用メモリ(ROM)、
12…D/A変換器、
13…信号増幅器、
14…信号処理回路、
21…フーリエ変換器、
22…ビームフォーミング回路、
23…ビームフォーミングスキャン量設定器、
24…レンジ量設定器、
31,41,51…参照信号発生器、
32,42,52…相関器、
33,43,53…逆フーリエ変換器、
34…位置検出信号発生器、
35…微細構造推定テーブル回路、
35R…読み出し専用メモリ(ROM)、
60,60A…概算速度推定部、
61,61A…窓関数信号発生器、
62,62A…遅延演算器、
63…畳み込み演算器、
63A…乗算器、
64…送信スペクトルテンプレート信号発生器、
65…信号比較器、
66…逆フーリエ変換器、
67…フーリエ変換器。
Claims (11)
- 指数関数間隔で配置された複数の周波数を有するマルチキャリア信号であるログステップマルチキャリア信号と同一の2つのログステップマルチキャリア信号を発生し、当該2つのログステップマルチキャリア信号を、時間軸上で原点を中心として前後逆向きに連結することで、原点に対して対称のログステップマルチキャリア信号を発生して送信信号として対象物体に送信する送信手段を備えたことを特徴とするドップラーイメージング信号送信装置。
- 上記対称のログステップマルチキャリア信号は、時間軸上の原点に対して線対称であることを特徴とする請求項1記載のドップラーイメージング信号送信装置。
- 上記対称のログステップマルチキャリア信号は、時間軸上の原点に対して点対称であることを特徴とする請求項1記載のドップラーイメージング信号送信装置。
- 上記ログステップマルチキャリア信号は、上記複数の周波数において位相が揃っている所定の初期位相を有することを特徴とする請求項1〜3のうちのいずれか1つに記載のドップラーイメージング信号送信装置。
- 上記送信手段は、上記対称のログステップマルチキャリア信号から、その時間軸上の原点とその近傍を含む所定の時間にかかる信号を除去した後、上記対象物体に放射することを特徴とする請求項1〜4のうちのいずれか1つに記載のドップラーイメージング信号送信装置。
- 上記送信手段は、上記対称のログステップマルチキャリア信号のうち、ドップラーイメージングの計測処理のために必要な所定の時間長を有する信号を抽出した後、上記対象物体に放射することを特徴とする請求項1〜5のうちのいずれか1つに記載のドップラーイメージング装置。
- 請求項1〜6のうちのいずれか1つに記載の上記対称のログステップマルチキャリア信号を対象物体に放射したときに、当該対象物体からの反射信号を受信し、受信した反射信号と、上記放射した対称のログステップマルチキャリア信号とに基づいてドップラーイメージングの計測処理を行うことにより、上記対象物体の位置及び速度の少なくとも一方を計測して画像化する信号処理手段を備えたことを特徴とするドップラーイメージング信号受信装置。
- 上記信号処理手段は、上記受信した反射信号と、上記放射した対称のログステップマルチキャリア信号との間の相互相関係数を上記対象物体の位置を示す位置検出信号として出力する位置検出部を備えたことを特徴とする請求項7記載のドップラーイメージング信号受信装置。
- 上記信号処理手段は、
所定の窓関数信号を所定の距離方向で遅延してなる信号と、上記受信した反射信号とに対して、周波数領域での畳み込み演算又は時間領域での乗算を行い、演算結果の信号と上記放射した対称のログステップマルチキャリア信号とを比較して周波数軸上の偏差を概算速度推定値として演算する概算速度推定部と、
上記概算速度推定部により演算される概算速度推定値と、上記相互相関係数とをインデックスとして予め計算された詳細速度推定値を格納する詳細速度テーブルを含む記憶装置を含み、上記インデックスを上記記憶装置に入力することで出力される詳細速度推定値と、上記概算速度推定値とに基づいて上記対象物体の速度を演算する詳細速度推定部とを備えたことを特徴とする請求項8記載のドップラーイメージング信号受信装置。 - 請求項1〜6のうちのいずれか1つに記載のドップラーイメージング信号送信装置と、
請求項7〜9のうちのいずれか1つに記載のドップラーイメージング信号受信装置とを備えたことを特徴とするドップラーイメージングシステム。 - 指数関数間隔で配置された複数の周波数を有するマルチキャリア信号であるログステップマルチキャリア信号と同一の2つのログステップマルチキャリア信号を発生し、当該2つのログステップマルチキャリア信号を、時間軸上で原点を中心として前後逆向きに連結することで、原点に対して対称のログステップマルチキャリア信号を発生して送信信号として対象物体に送信するステップと、
上記対称のログステップマルチキャリア信号を対象物体に放射したときに、当該対象物体からの反射信号を受信し、受信した反射信号と、上記放射した対称のログステップマルチキャリア信号とに基づいてドップラーイメージングの計測処理を行うことにより、上記対象物体の位置及び速度の少なくとも一方を計測して画像化するステップとを含むことを特徴とするドップラーイメージング方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013146637A JP6179940B2 (ja) | 2013-07-12 | 2013-07-12 | ドップラーイメージング信号送信装置、ドップラーイメージング信号受信装置、ドップラーイメージングシステム及び方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013146637A JP6179940B2 (ja) | 2013-07-12 | 2013-07-12 | ドップラーイメージング信号送信装置、ドップラーイメージング信号受信装置、ドップラーイメージングシステム及び方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2015017942A JP2015017942A (ja) | 2015-01-29 |
| JP2015017942A5 JP2015017942A5 (ja) | 2016-07-21 |
| JP6179940B2 true JP6179940B2 (ja) | 2017-08-16 |
Family
ID=52439056
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013146637A Expired - Fee Related JP6179940B2 (ja) | 2013-07-12 | 2013-07-12 | ドップラーイメージング信号送信装置、ドップラーイメージング信号受信装置、ドップラーイメージングシステム及び方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6179940B2 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017141370A1 (ja) * | 2016-02-17 | 2017-08-24 | 三菱電機株式会社 | 物体検出装置、物体検出方法及び物体検出プログラム |
| US11125870B2 (en) | 2016-08-26 | 2021-09-21 | Nec Corporation | Moving-target detection system and moving-target detection method |
| WO2018154875A1 (ja) * | 2017-02-22 | 2018-08-30 | ソニーセミコンダクタソリューションズ株式会社 | レーダー装置、レーダーシステムおよびレーダー装置の制御方法 |
| US11231495B2 (en) | 2017-03-30 | 2022-01-25 | Nec Corporation | Signal processing device and signal processing method |
| CN110609263B (zh) * | 2019-10-29 | 2022-11-04 | 电子科技大学 | 一种同时计算脉冲激光雷达目标回波时延和频偏的方法 |
| JPWO2021130818A1 (ja) * | 2019-12-23 | 2021-12-23 | 三菱電機株式会社 | 検出装置、検出方法、及び、検出プログラム |
| WO2023152884A1 (ja) * | 2022-02-10 | 2023-08-17 | 三菱電機株式会社 | 画像生成装置及びシステム |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5369350B2 (ja) * | 2009-08-14 | 2013-12-18 | 東京計器株式会社 | パルス圧縮における送信波形生成方法、送信波形生成プログラム及び送信波形生成方法によって製造されたパルス圧縮装置 |
| JP5704695B2 (ja) * | 2010-12-24 | 2015-04-22 | 大学共同利用機関法人情報・システム研究機構 | ドップラーレーダーシステム、ドップラーレーダー送信装置及び送信波最適化方法 |
| EP2579487B1 (en) * | 2011-10-03 | 2014-05-21 | ST-Ericsson SA | Non-contiguous carrier aggregation |
-
2013
- 2013-07-12 JP JP2013146637A patent/JP6179940B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2015017942A (ja) | 2015-01-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6179940B2 (ja) | ドップラーイメージング信号送信装置、ドップラーイメージング信号受信装置、ドップラーイメージングシステム及び方法 | |
| US6663565B2 (en) | Ultrasound diagnostic apparatus | |
| CN106405541B (zh) | 全相参连续波多普勒雷达及其测距测速方法 | |
| JP6053860B2 (ja) | 医療用超音波イメージングシステムにおいて剪断波情報を求めるためのコンピュータプログラム | |
| Siderius et al. | Modeling broadband ocean acoustic transmissions with time-varying sea surfaces | |
| US9465101B2 (en) | Aberration correction with broad transmit beams in medical ultrasound | |
| CN103033816B (zh) | 基于圆弧扫描转换的合成孔径聚焦超声成像实现方法 | |
| JP2544342B2 (ja) | 超音波ドップラ―診断装置 | |
| CN104107068A (zh) | 被检体信息获取设备和被检体信息获取方法 | |
| WO2018038128A1 (ja) | 移動目標探知システム及び移動目標探知方法 | |
| JPH10258052A (ja) | 波動受信装置および超音波診断装置 | |
| JP4369427B2 (ja) | ドプラ速度検出装置及びそれを用いた超音波診断装置 | |
| JP5704695B2 (ja) | ドップラーレーダーシステム、ドップラーレーダー送信装置及び送信波最適化方法 | |
| WO2016029402A1 (zh) | 剪切波成像方法及系统 | |
| KR102164450B1 (ko) | 전단파 이미징을 위한 가변 초점 | |
| JP2003121544A (ja) | ドップラシフト周波数測定装置およびその利用装置 | |
| JPH10332818A (ja) | 目標位置局限方法 | |
| US10646202B2 (en) | Sheer speed imaging using coherence | |
| Marszal et al. | Application of maximum length sequence in silent sonar | |
| CN114569152A (zh) | 一种基于稀疏脉冲的血管流速估计方法 | |
| JP2013113723A (ja) | レーダ装置 | |
| JP6147617B2 (ja) | レーダ装置及びその信号処理方法 | |
| Fujiwara et al. | A novel technique for high resolution ultrasound imaging super resolution FM-Chirp correlation Method (SCM) | |
| RU2066060C1 (ru) | Способ картографирования с помощью синтезированной апертуры | |
| JP2019120613A (ja) | レーダ装置、レーダ装置の制御方法、およびプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160602 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160602 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170704 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170712 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6179940 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |