JP6172430B2 - 眼鏡枠形状測定装置 - Google Patents
眼鏡枠形状測定装置 Download PDFInfo
- Publication number
- JP6172430B2 JP6172430B2 JP2012195457A JP2012195457A JP6172430B2 JP 6172430 B2 JP6172430 B2 JP 6172430B2 JP 2012195457 A JP2012195457 A JP 2012195457A JP 2012195457 A JP2012195457 A JP 2012195457A JP 6172430 B2 JP6172430 B2 JP 6172430B2
- Authority
- JP
- Japan
- Prior art keywords
- rim
- measurement
- probe
- measuring element
- bevel groove
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B5/00—Measuring arrangements characterised by the use of mechanical techniques
- G01B5/20—Measuring arrangements characterised by the use of mechanical techniques for measuring contours or curvatures
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B24—GRINDING; POLISHING
- B24B—MACHINES, DEVICES, OR PROCESSES FOR GRINDING OR POLISHING; DRESSING OR CONDITIONING OF ABRADING SURFACES; FEEDING OF GRINDING, POLISHING, OR LAPPING AGENTS
- B24B9/00—Machines or devices designed for grinding edges or bevels on work or for removing burrs; Accessories therefor
- B24B9/02—Machines or devices designed for grinding edges or bevels on work or for removing burrs; Accessories therefor characterised by a special design with respect to properties of materials specific to articles to be ground
- B24B9/06—Machines or devices designed for grinding edges or bevels on work or for removing burrs; Accessories therefor characterised by a special design with respect to properties of materials specific to articles to be ground of non-metallic inorganic material, e.g. stone, ceramics, porcelain
- B24B9/08—Machines or devices designed for grinding edges or bevels on work or for removing burrs; Accessories therefor characterised by a special design with respect to properties of materials specific to articles to be ground of non-metallic inorganic material, e.g. stone, ceramics, porcelain of glass
- B24B9/14—Machines or devices designed for grinding edges or bevels on work or for removing burrs; Accessories therefor characterised by a special design with respect to properties of materials specific to articles to be ground of non-metallic inorganic material, e.g. stone, ceramics, porcelain of glass of optical work, e.g. lenses, prisms
- B24B9/144—Machines or devices designed for grinding edges or bevels on work or for removing burrs; Accessories therefor characterised by a special design with respect to properties of materials specific to articles to be ground of non-metallic inorganic material, e.g. stone, ceramics, porcelain of glass of optical work, e.g. lenses, prisms the spectacles being used as a template
-
- G—PHYSICS
- G02—OPTICS
- G02C—SPECTACLES; SUNGLASSES OR GOGGLES INSOFAR AS THEY HAVE THE SAME FEATURES AS SPECTACLES; CONTACT LENSES
- G02C13/00—Assembling; Repairing; Cleaning
- G02C13/003—Measuring during assembly or fitting of spectacles
Description
(1) 眼鏡フレームのリムの前側及び後側を所定位置で保持するフレーム保持手段と、リムのヤゲン溝に挿入される測定子と、測定子をリムのヤゲン溝に沿わせて移動するための移動手段と、ヤゲン溝に沿って移動される前記測定子の位置を検知する検知手段と、前記移動手段を制御し、前記検知手段の検知結果に基づいてリムの形状の測定データを得る制御手段と、を備える眼鏡枠形状測定装置において、前記制御手段は、リムの測定開始点から前記測定子を移動させることによって得られた測定データの変化に基づき、測定開始点で前記測定子が前記ヤゲン溝に挿入された第1状態と、測定開始点で前記測定子が前記ヤゲン溝に挿入されていない第2状態と、の何れの状態で測定が開始されたかを判定し、前記第2状態で測定が開始されたと判定したときには再測定に移行し、再測定では、前記第1状態で測定が開始されたときに行う前記移動手段の制御に対して少なくとも一部の動作を変更する制御であって、前記測定子をリムから離脱させた後、リムの前後幅のほぼ中央位置に前記測定子を接触させるように前記移動手段を制御し、そして、(a)リムの前後幅方向における前記測定子の接触位置を維持した状態で、リムの耳側方向に測定子を移動させるように前記移動手段を制御するか、又は(b)測定子をリムの前側方向に向かわせつつ、リムの耳側方向に測定子を移動させるように前記移動手段を制御するか、の何れかを行うことを特徴とする。
(2) (1)の眼鏡枠形状測定装置において、前記制御手段は、再測定では、再測定で得られた測定データの変化に基づき、前記測定子の移動途中で前記測定子が前記ヤゲン溝に挿入されたか否かを判定し、該判定によって前記測定子が前記ヤゲン溝に挿入されたと判定された地点から前記測定子を前記ヤゲン溝に沿って移動させ、リムの全周形状の測定データを得るように前記移動手段を制御することを特徴とする。
(3) 眼鏡フレームのリムの前側及び後側を所定位置で保持するフレーム保持手段と、リムのヤゲン溝に挿入される測定子と、測定子をリムのヤゲン溝に沿わせて移動するための移動手段と、ヤゲン溝に沿って移動される前記測定子の位置を検知する検知手段と、前記移動手段を制御し、前記検知手段の検知結果に基づいてリムの形状の測定データを得る制御手段と、を備える眼鏡枠形状測定装置において、左右リムの一方の第1リムを測定した後に他方の第2リムを連続して測定するための連続測定開始信号を入力するための測定開始信号入力手段と、リムの測定データを記憶する記憶手段と、を備え、前記制御手段は、第1リムの測定では、リムの測定開始点から前記測定子を移動させることによって得られた測定データの変化に基づき、測定開始点で前記測定子が前記ヤゲン溝に挿入された第1状態と、測定開始点で前記測定子が前記ヤゲン溝に挿入されていない第2状態と、の何れの状態で測定が開始されたかを判定し、前記第2状態で測定が開始されたと判定したときには再測定に移行し、再測定では、前記第1状態で測定が開始されたときに行う前記移動手段の制御に対して少なくとも一部の動作を変更する制御であって、前記測定子をリムから離脱させた後、リムの前後幅のほぼ中央位置に前記測定子を接触させるように前記移動手段を制御し、そして、(a)リムの前後幅方向における前記測定子の接触位置を維持した状態で、リムの耳側方向に測定子を移動させるように前記移動手段を制御するか、又は(b)測定子をリムの前側方向に向かわせつつ、リムの耳側方向に測定子を移動させるように前記移動手段を制御するか、の何れかを行い、さらに、前記連続測定開始信号が入力されているときには、第1リムの測定終了後に、前記記憶手段に記憶された第1リムの測定データに基づき、第2リムの初期測定開始点に測定子をリム側に移動するときのリムの前後幅方向における測定子の位置を決定することを特徴とする。
51 メモリ
100 フレーム保持ユニット
200 測定ユニット
210 移動ユニット
250 測定子保持ユニット
260 回転ユニット
280 垂直傾斜保持ユニット
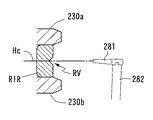
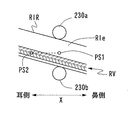
281 測定子
282 測定子軸
295 規制機構
Claims (3)
- 眼鏡フレームのリムの前側及び後側を所定位置で保持するフレーム保持手段と、リムのヤゲン溝に挿入される測定子と、測定子をリムのヤゲン溝に沿わせて移動するための移動手段と、ヤゲン溝に沿って移動される前記測定子の位置を検知する検知手段と、前記移動手段を制御し、前記検知手段の検知結果に基づいてリムの形状の測定データを得る制御手段と、を備える眼鏡枠形状測定装置において、
前記制御手段は、リムの測定開始点から前記測定子を移動させることによって得られた測定データの変化に基づき、測定開始点で前記測定子が前記ヤゲン溝に挿入された第1状態と、測定開始点で前記測定子が前記ヤゲン溝に挿入されていない第2状態と、の何れの状態で測定が開始されたかを判定し、前記第2状態で測定が開始されたと判定したときには再測定に移行し、再測定では、前記第1状態で測定が開始されたときに行う前記移動手段の制御に対して少なくとも一部の動作を変更する制御であって、前記測定子をリムから離脱させた後、リムの前後幅のほぼ中央位置に前記測定子を接触させるように前記移動手段を制御し、そして、(a)リムの前後幅方向における前記測定子の接触位置を維持した状態で、リムの耳側方向に測定子を移動させるように前記移動手段を制御するか、又は(b)測定子をリムの前側方向に向かわせつつ、リムの耳側方向に測定子を移動させるように前記移動手段を制御するか、の何れかを行うことを特徴とする眼鏡枠形状測定装置。 - 請求項1の眼鏡枠形状測定装置において、
前記制御手段は、再測定では、再測定で得られた測定データの変化に基づき、前記測定子の移動途中で前記測定子が前記ヤゲン溝に挿入されたか否かを判定し、該判定によって前記測定子が前記ヤゲン溝に挿入されたと判定された地点から前記測定子を前記ヤゲン溝に沿って移動させ、リムの全周形状の測定データを得るように前記移動手段を制御することを特徴とする眼鏡枠形状測定装置。 - 眼鏡フレームのリムの前側及び後側を所定位置で保持するフレーム保持手段と、リムのヤゲン溝に挿入される測定子と、測定子をリムのヤゲン溝に沿わせて移動するための移動手段と、ヤゲン溝に沿って移動される前記測定子の位置を検知する検知手段と、前記移動手段を制御し、前記検知手段の検知結果に基づいてリムの形状の測定データを得る制御手段と、を備える眼鏡枠形状測定装置において、
左右リムの一方の第1リムを測定した後に他方の第2リムを連続して測定するための連続測定開始信号を入力するための測定開始信号入力手段と、
リムの測定データを記憶する記憶手段と、を備え、
前記制御手段は、第1リムの測定では、リムの測定開始点から前記測定子を移動させることによって得られた測定データの変化に基づき、測定開始点で前記測定子が前記ヤゲン溝に挿入された第1状態と、測定開始点で前記測定子が前記ヤゲン溝に挿入されていない第2状態と、の何れの状態で測定が開始されたかを判定し、前記第2状態で測定が開始されたと判定したときには再測定に移行し、再測定では、前記第1状態で測定が開始されたときに行う前記移動手段の制御に対して少なくとも一部の動作を変更する制御であって、前記測定子をリムから離脱させた後、リムの前後幅のほぼ中央位置に前記測定子を接触させるように前記移動手段を制御し、そして、(a)リムの前後幅方向における前記測定子の接触位置を維持した状態で、リムの耳側方向に測定子を移動させるように前記移動手段を制御するか、又は(b)測定子をリムの前側方向に向かわせつつ、リムの耳側方向に測定子を移動させるように前記移動手段を制御するか、の何れかを行い、さらに、前記連続測定開始信号が入力されているときには、第1リムの測定終了後に、前記記憶手段に記憶された第1リムの測定データに基づき、第2リムの初期測定開始点に測定子をリム側に移動するときのリムの前後幅方向における測定子の位置を決定することを特徴とする眼鏡枠形状測定装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012195457A JP6172430B2 (ja) | 2012-09-05 | 2012-09-05 | 眼鏡枠形状測定装置 |
| US14/017,755 US9080853B2 (en) | 2012-09-05 | 2013-09-04 | Eyeglass frame shape measuring apparatus |
| EP20130183074 EP2706323B1 (en) | 2012-09-05 | 2013-09-05 | Eyeglass frame shape measuring apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012195457A JP6172430B2 (ja) | 2012-09-05 | 2012-09-05 | 眼鏡枠形状測定装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2014052222A JP2014052222A (ja) | 2014-03-20 |
| JP2014052222A5 JP2014052222A5 (ja) | 2015-10-29 |
| JP6172430B2 true JP6172430B2 (ja) | 2017-08-02 |
Family
ID=49084919
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012195457A Active JP6172430B2 (ja) | 2012-09-05 | 2012-09-05 | 眼鏡枠形状測定装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US9080853B2 (ja) |
| EP (1) | EP2706323B1 (ja) |
| JP (1) | JP6172430B2 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9535269B2 (en) * | 2013-06-24 | 2017-01-03 | Nidek Co., Ltd. | Eyeglass frame shape measuring apparatus |
| CN107179032A (zh) * | 2016-03-11 | 2017-09-19 | 上海强精金属制品有限公司 | 一种微波炉门检测装置 |
| JP7156288B2 (ja) * | 2017-09-05 | 2022-10-19 | 株式会社ニデック | 眼鏡枠形状測定装置及び眼鏡枠形状測定プログラム |
| JP7052567B2 (ja) | 2018-05-31 | 2022-04-12 | 株式会社ニデック | 眼鏡レンズ加工制御データ取得装置 |
| JP7276050B2 (ja) * | 2019-09-30 | 2023-05-18 | 株式会社ニデック | 眼鏡枠形状測定装置、及びレンズ加工装置 |
| EP3978863A1 (en) * | 2020-09-30 | 2022-04-06 | Nidek Co., Ltd. | Eyeglass frame shape measurement apparatus and control program for eyeglass frame shape measurement apparatus |
| CN112123800B (zh) * | 2020-10-16 | 2022-07-01 | 深圳市华成利工数控设备有限公司 | 眼镜腿插针设备 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5333412A (en) * | 1990-08-09 | 1994-08-02 | Nidek Co., Ltd. | Apparatus for and method of obtaining processing information for fitting lenses in eyeglasses frame and eyeglasses grinding machine |
| US5121550A (en) * | 1990-12-03 | 1992-06-16 | Gerber Optial, Inc. | Automatic surface tracer |
| JP2578354Y2 (ja) * | 1993-01-08 | 1998-08-13 | ホーヤ株式会社 | 眼鏡レンズ枠形状測定装置 |
| JPH0843071A (ja) * | 1994-07-27 | 1996-02-16 | Topcon Corp | レンズ枠形状測定装置 |
| JP3695988B2 (ja) | 1999-04-30 | 2005-09-14 | 株式会社ニデック | 眼鏡枠形状測定装置 |
| FR2870934B1 (fr) | 2004-05-28 | 2006-09-08 | Essilor Int | Appareil de lecture de contour comportant un palpeur mobile en rotation |
| FR2893723B1 (fr) * | 2005-11-23 | 2008-02-01 | Essilor Int | Appareil de lecture de contour de drageoir de cercle de monture de lunettes |
| FR2910136B1 (fr) | 2006-12-18 | 2009-02-27 | Essilor Int | Procede de correction de la geometrie d'une couche palpee approchant un brin longitudinal d'un drageoir de monture de lunettes et procede d'acquisition de la geometrie d'un contour d'un tel drageoir |
| JP4920514B2 (ja) | 2007-07-04 | 2012-04-18 | 株式会社ニデック | 玉型形状測定装置 |
| FR2934903B1 (fr) | 2008-08-07 | 2012-04-06 | Briot Int | Appareil de lecture de la geometrie d'un drageoir. |
| FR2950162B1 (fr) * | 2009-09-14 | 2011-10-07 | Essilor Int | Procede d'elaboration d'une consigne de detourage d'une lentille ophtalmique. |
| JP5586930B2 (ja) | 2009-12-09 | 2014-09-10 | 株式会社ニデック | 眼鏡枠形状測定装置 |
| JP5562624B2 (ja) | 2009-12-09 | 2014-07-30 | 株式会社ニデック | 眼鏡枠形状測定装置 |
| FR2983316B1 (fr) * | 2011-11-30 | 2014-06-27 | Essilor Int | Procede de preparation d'une lentille ophtalmique |
| US9535269B2 (en) * | 2013-06-24 | 2017-01-03 | Nidek Co., Ltd. | Eyeglass frame shape measuring apparatus |
-
2012
- 2012-09-05 JP JP2012195457A patent/JP6172430B2/ja active Active
-
2013
- 2013-09-04 US US14/017,755 patent/US9080853B2/en active Active
- 2013-09-05 EP EP20130183074 patent/EP2706323B1/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US9080853B2 (en) | 2015-07-14 |
| EP2706323A1 (en) | 2014-03-12 |
| JP2014052222A (ja) | 2014-03-20 |
| US20140059871A1 (en) | 2014-03-06 |
| EP2706323B1 (en) | 2015-03-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6172430B2 (ja) | 眼鏡枠形状測定装置 | |
| JP5562624B2 (ja) | 眼鏡枠形状測定装置 | |
| US8844146B2 (en) | Eyeglass frame shape measurement device | |
| JP5586930B2 (ja) | 眼鏡枠形状測定装置 | |
| JP6080002B2 (ja) | 眼鏡レンズ加工装置 | |
| US6719609B2 (en) | Eyeglass lens processing apparatus | |
| JP2001105293A (ja) | 玉型形状測定装置及びこれを有する眼鏡レンズ加工装置、並びに玉型形状測定装置のキャリブレーション方法 | |
| JP3839185B2 (ja) | 眼鏡レンズ加工装置 | |
| KR20130135175A (ko) | 안경 렌즈 가공 장치 | |
| US5890949A (en) | Eyeglass lens grinding machine | |
| KR101952447B1 (ko) | 안경테 형상 측정 장치 | |
| JP6093506B2 (ja) | 表面性状測定機および表面性状測定方法 | |
| JP5198978B2 (ja) | 眼鏡枠形状測定装置 | |
| JP6071103B2 (ja) | 眼鏡枠形状測定装置 | |
| JP6102850B2 (ja) | マシニングセンタのz軸バックラッシュ量検出方法及び装置 | |
| US9144876B2 (en) | Eyeglass lens processing apparatus | |
| JP2013068439A (ja) | 眼鏡枠形状測定装置 | |
| JP2013068488A (ja) | 眼鏡枠形状測定装置 | |
| JP6254417B2 (ja) | 測定装置 | |
| JP2000343394A (ja) | 玉型形状測定装置及びこれを有する眼鏡レンズ加工装置 | |
| JP6319627B2 (ja) | 眼鏡レンズ周縁形状測定装置及び眼鏡レンズの周縁形状測定方法 | |
| JP2002192420A (ja) | 帯鋸盤 | |
| JP7084062B1 (ja) | 眼鏡フレーム形状測定装置 | |
| JP2015196215A (ja) | 眼鏡レンズ周縁形状測定装置及び眼鏡レンズ周縁形状測定プログラム | |
| KR100881031B1 (ko) | 안경테 홈 리딩 기능을 갖는 안경테 형상 측정기 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150903 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150903 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160728 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160809 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161011 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170314 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170512 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170607 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170620 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6172430 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |