JP6149814B2 - ハイブリッド車両 - Google Patents
ハイブリッド車両 Download PDFInfo
- Publication number
- JP6149814B2 JP6149814B2 JP2014138790A JP2014138790A JP6149814B2 JP 6149814 B2 JP6149814 B2 JP 6149814B2 JP 2014138790 A JP2014138790 A JP 2014138790A JP 2014138790 A JP2014138790 A JP 2014138790A JP 6149814 B2 JP6149814 B2 JP 6149814B2
- Authority
- JP
- Japan
- Prior art keywords
- mode
- driving force
- vehicle
- traveling
- vehicle driving
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/10—Controlling the power contribution of each of the prime movers to meet required power demand
- B60W20/15—Control strategies specially adapted for achieving a particular effect
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/44—Series-parallel type
- B60K6/445—Differential gearing distribution type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/48—Parallel type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/08—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of electric propulsion units, e.g. motors or generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/24—Energy storage means
- B60W2510/242—Energy storage means for electrical energy
- B60W2510/244—Charge state
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S903/00—Hybrid electric vehicles, HEVS
- Y10S903/902—Prime movers comprising electrical and internal combustion motors
- Y10S903/903—Prime movers comprising electrical and internal combustion motors having energy storing means, e.g. battery, capacitor
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Automation & Control Theory (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Hybrid Electric Vehicles (AREA)
Description
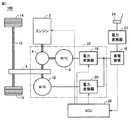
図1は、この発明の実施の形態1に従うハイブリッド車両の全体構成を説明するためのブロック図である。図1を参照して、ハイブリッド車両100は、エンジン2と、駆動装置22と、伝達ギヤ8と、駆動軸12と、車輪14と、蓄電装置16とを備える。また、ハイブリッド車両100は、電力変換器23と、接続部24と、ECU(Electronic Control Unit)26とをさらに備える。
上記の実施の形態1では、要求パワーの最大値、すなわちアクセル開度が100%(全開)のときの要求パワー(車両駆動力)は、CDモードでもCSモードと同じであったが、この変形例では、CDモードにおいては、CSモード時よりも要求パワー(車両駆動力)の最大値が小さい。これにより、過度なアクセル操作に対しても、車両駆動力が確実に抑制され、その結果、燃費を確実に向上させることが可能となる。
この実施の形態2では、車両の加速性よりも燃費の低減を優先した走行を可能とするECOモードスイッチが設けられる。そして、ECOモードスイッチがユーザにより操作されてECOモードが選択された場合において、CDモード中は、CSモード中よりも、同一のアクセル開度に対する車両駆動力が小さくなるように要求パワーが設定される。
実施の形態1の変形例と同様に、この変形例では、ECOモードの選択中にCDモードで走行しているときは、ノーマルモードのとき(ECOモードの非選択時)、又はECOモードの選択中にCSモードで走行しているときよりも、要求パワー(車両駆動力)の最大値が小さい。これにより、過度なアクセル操作に対しても、車両駆動力が確実に抑制され、その結果、CDモードにおける燃費を確実に向上させることが可能となる。
Claims (6)
- 蓄電装置と、
前記蓄電装置に蓄えられた電力を受けて車両駆動力を発生する駆動装置と、
内燃機関とを備え、
前記駆動装置は、さらに、前記内燃機関の出力を用いて前記蓄電装置を充電するための電力を生成可能に構成され、さらに
前記蓄電装置のSOCを消費するCD(Charge Depleting)モードと、前記SOCを所定レベルに維持するCS(Charge Sustaining)モードとのいずれかを選択して走行するための制御装置を備え、
前記駆動装置は、車両駆動力を発生する電動機を含み、
前記制御装置は、前記CDモードにおいて、走行状況に応じて、前記内燃機関を停止して前記電動機により走行するEV走行と、前記内燃機関を作動させて走行するHV走行とを切り替え、
前記制御装置は、前記EV走行中か前記HV走行中かに拘わらず、前記CDモードが選択されているときは、前記CSモードが選択されているときよりも、同一のアクセル開度に対する車両駆動力が小さくなるように車両駆動力を制御する、ハイブリッド車両。 - 蓄電装置と、
前記蓄電装置に蓄えられた電力を受けて車両駆動力を発生する駆動装置と、
内燃機関とを備え、
前記駆動装置は、さらに、前記内燃機関の出力を用いて前記蓄電装置を充電するための電力を生成可能に構成され、さらに
前記蓄電装置のSOCを消費するCD(Charge Depleting)モードと、前記SOCを所定レベルに維持するCS(Charge Sustaining)モードとのいずれかを選択して走行するための制御装置を備え、
前記駆動装置は、車両駆動力を発生する電動機を含み、
前記制御装置は、前記CDモードにおいて、走行状況に応じて、前記内燃機関を停止して前記電動機により走行するEV走行と、前記内燃機関を作動させて走行するHV走行とを切り替え、
前記制御装置は、前記CDモードが選択されているときは、前記CSモードが選択されているときよりも、同一のアクセル開度に対するHV走行中の車両駆動力が小さくなるように車両駆動力を制御する、ハイブリッド車両。 - 前記制御装置は、車両の加速性よりも燃費の低減を優先する所定モードが選択されている場合において、前記CDモードが選択されているときは、前記CSモードが選択されているときよりも、同一のアクセル開度に対する車両駆動力が小さくなるように車両駆動力を制御する、請求項1又は請求項2に記載のハイブリッド車両。
- 蓄電装置と、
前記蓄電装置に蓄えられた電力を受けて車両駆動力を発生する駆動装置と、
内燃機関とを備え、
前記駆動装置は、さらに、前記内燃機関の出力を用いて前記蓄電装置を充電するための電力を生成可能に構成され、さらに
前記蓄電装置のSOCを消費するCD(Charge Depleting)モードと、前記SOCを所定レベルに維持するCS(Charge Sustaining)モードとのいずれかを選択して走行するための制御装置を備え、
前記制御装置は、前記CDモードが選択されているときは、前記CSモードが選択されているときよりも、同一のアクセル開度に対する車両駆動力が小さくなるように車両駆動力を制御し、
前記制御装置は、前記CDモードが選択されているときは、前記CSモードが選択されているときよりも、車両駆動力の最大値が小さくなるように車両駆動力を制御する、ハイブリッド車両。 - 前記駆動装置は、車両駆動力を発生する電動機を含み、
前記CDモードが選択されているときの車両駆動力の最大値は、前記電動機のトルクが所定の制限トルクを超えないように設定され、
前記所定の制限トルクは、前記電動機の効率に基づき設定され、前記電動機が出力可能な最大トルクよりも小さい、請求項4に記載のハイブリッド車両。 - 車両外部の電源からの電力を用いて前記蓄電装置を充電するための充電機構をさらに備える、請求項1から請求項5のいずれか1項に記載のハイブリッド車両。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014138790A JP6149814B2 (ja) | 2014-07-04 | 2014-07-04 | ハイブリッド車両 |
| US14/753,260 US9878701B2 (en) | 2014-07-04 | 2015-06-29 | Hybrid vehicle |
| DE102015110688.4A DE102015110688B9 (de) | 2014-07-04 | 2015-07-02 | Hybridfahrzeug |
| CN201510388623.5A CN105235678B (zh) | 2014-07-04 | 2015-07-03 | 混合动力车辆 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014138790A JP6149814B2 (ja) | 2014-07-04 | 2014-07-04 | ハイブリッド車両 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016016689A JP2016016689A (ja) | 2016-02-01 |
| JP6149814B2 true JP6149814B2 (ja) | 2017-06-21 |
Family
ID=54866360
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014138790A Active JP6149814B2 (ja) | 2014-07-04 | 2014-07-04 | ハイブリッド車両 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9878701B2 (ja) |
| JP (1) | JP6149814B2 (ja) |
| CN (1) | CN105235678B (ja) |
| DE (1) | DE102015110688B9 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6363493B2 (ja) * | 2014-12-19 | 2018-07-25 | トヨタ自動車株式会社 | ハイブリッド車両 |
| JP6439722B2 (ja) * | 2016-03-08 | 2018-12-19 | トヨタ自動車株式会社 | ハイブリッド自動車 |
| CN114633757A (zh) * | 2020-11-30 | 2022-06-17 | 荷兰移动驱动器公司 | 驾驶辅助方法及车载装置 |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4254786B2 (ja) * | 2006-02-08 | 2009-04-15 | トヨタ自動車株式会社 | 車両及びその制御方法 |
| JP5162998B2 (ja) * | 2006-10-12 | 2013-03-13 | 日産自動車株式会社 | ハイブリッド車両のモード切り替え制御装置 |
| JP4232824B2 (ja) * | 2006-12-28 | 2009-03-04 | トヨタ自動車株式会社 | ハイブリッド自動車およびその制御方法 |
| JP4997986B2 (ja) | 2007-01-19 | 2012-08-15 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
| JP2008296619A (ja) * | 2007-05-29 | 2008-12-11 | Toyota Motor Corp | ハイブリッド車両、ハイブリッド車両の制御方法およびその制御方法をコンピュータに実行させるためのプログラムを記録したコンピュータ読取可能な記録媒体 |
| JP4341704B2 (ja) * | 2007-07-12 | 2009-10-07 | トヨタ自動車株式会社 | ハイブリッド車両およびハイブリッド車両の制御方法 |
| JP4818337B2 (ja) | 2008-09-17 | 2011-11-16 | 本田技研工業株式会社 | 車両の制御装置 |
| WO2010073309A1 (ja) * | 2008-12-22 | 2010-07-01 | トヨタ自動車株式会社 | ハイブリッド車両 |
| JP2009143563A (ja) * | 2009-01-26 | 2009-07-02 | Toyota Motor Corp | ハイブリッド車両 |
| JP2011093335A (ja) * | 2009-10-27 | 2011-05-12 | Toyota Motor Corp | ハイブリッド車両の制御装置 |
| EP2557007B1 (en) * | 2010-04-07 | 2019-10-02 | Toyota Jidosha Kabushiki Kaisha | Control device for hybrid vehicle and hybrid vehicle incorporating control device |
| JP5187362B2 (ja) * | 2010-08-20 | 2013-04-24 | トヨタ自動車株式会社 | 車両の制御装置 |
| US8983699B2 (en) | 2011-02-01 | 2015-03-17 | Toyota Jidosha Kabushiki Kaisha | Vehicle, method and device for controlling vehicle |
| JP2012219795A (ja) * | 2011-04-14 | 2012-11-12 | Toyota Motor Corp | 車両およびその制御方法 |
| JP5930018B2 (ja) * | 2012-02-17 | 2016-06-08 | トヨタ自動車株式会社 | 車両および車両用制御方法 |
| CN102849062B (zh) * | 2012-09-18 | 2015-10-14 | 中国第一汽车股份有限公司 | 一种增程式电动汽车的驱动控制方法 |
| JP5680176B2 (ja) | 2012-12-21 | 2015-03-04 | 株式会社高尾 | 循環式遊技機 |
| CN103192737B (zh) * | 2013-03-25 | 2015-10-07 | 吉林大学 | 纯电动轿车驱动控制方法 |
-
2014
- 2014-07-04 JP JP2014138790A patent/JP6149814B2/ja active Active
-
2015
- 2015-06-29 US US14/753,260 patent/US9878701B2/en active Active
- 2015-07-02 DE DE102015110688.4A patent/DE102015110688B9/de active Active
- 2015-07-03 CN CN201510388623.5A patent/CN105235678B/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| DE102015110688A1 (de) | 2016-01-07 |
| CN105235678B (zh) | 2018-04-03 |
| DE102015110688B9 (de) | 2023-10-19 |
| US9878701B2 (en) | 2018-01-30 |
| US20160001767A1 (en) | 2016-01-07 |
| JP2016016689A (ja) | 2016-02-01 |
| DE102015110688B4 (de) | 2023-05-17 |
| CN105235678A (zh) | 2016-01-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6363493B2 (ja) | ハイブリッド車両 | |
| JP6213497B2 (ja) | ハイブリッド車両 | |
| JP6156303B2 (ja) | ハイブリッド車両 | |
| JP6179504B2 (ja) | ハイブリッド車両 | |
| JPWO2011128986A1 (ja) | ハイブリッド車両 | |
| JP5696791B2 (ja) | 車両および車両の制御方法 | |
| US9199542B2 (en) | Vehicle and method of controlling vehicle | |
| WO2013018221A1 (ja) | 車両および車両の制御方法 | |
| JP5811181B2 (ja) | 車両および車両の制御方法 | |
| JP2016117374A (ja) | ハイブリッド車両 | |
| JPWO2013065166A1 (ja) | 車両および車両の制御方法 | |
| JPWO2012105021A1 (ja) | ハイブリッド車両およびその制御方法 | |
| JP6149814B2 (ja) | ハイブリッド車両 | |
| US9573581B2 (en) | Hybrid vehicle | |
| US9663100B2 (en) | Hybrid vehicle | |
| JP2013006430A (ja) | ハイブリッド車両およびその制御方法 | |
| JP2015013517A (ja) | 車両の制御装置 | |
| JP2016155486A (ja) | ハイブリッド車両 | |
| JP2017154582A (ja) | ハイブリッド車両 | |
| JP2016010981A (ja) | ハイブリッド車両の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160120 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160920 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160923 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161116 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170425 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170508 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6149814 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |