JP6091318B2 - 測距装置およびその制御方法 - Google Patents
測距装置およびその制御方法 Download PDFInfo
- Publication number
- JP6091318B2 JP6091318B2 JP2013093786A JP2013093786A JP6091318B2 JP 6091318 B2 JP6091318 B2 JP 6091318B2 JP 2013093786 A JP2013093786 A JP 2013093786A JP 2013093786 A JP2013093786 A JP 2013093786A JP 6091318 B2 JP6091318 B2 JP 6091318B2
- Authority
- JP
- Japan
- Prior art keywords
- distance
- image
- shift amount
- image signal
- contrast
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

















Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/20—Image signal generators
- H04N13/204—Image signal generators using stereoscopic image cameras
- H04N13/239—Image signal generators using stereoscopic image cameras using two two-dimensional [2D] image sensors having a relative position equal to or related to the interocular distance
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/50—Depth or shape recovery
- G06T7/55—Depth or shape recovery from multiple images
- G06T7/593—Depth or shape recovery from multiple images from stereo images
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10004—Still image; Photographic image
- G06T2207/10012—Stereo images
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/20—Image signal generators
- H04N13/271—Image signal generators wherein the generated image signals comprise depth maps or disparity maps
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Automatic Focus Adjustment (AREA)
- Studio Devices (AREA)
- Focusing (AREA)
- Stereoscopic And Panoramic Photography (AREA)
- Measurement Of Optical Distance (AREA)
- Image Processing (AREA)
Description
このとき、対象である被写体が遠方ならびに近方を同時に含む被写体の場合には像ズレ量と遠近の対応が不明瞭となり、正確な測距演算を行うことができない。また、周期的なパターンを有する被写体も像ズレ量の解が複数求まり正確な測距演算を行うことができない。
第一の視点の第一の像信号と第二の視点の第二の像信号を取得する像信号取得手段と、
距離検出領域における前記第一の像信号と、前記距離検出領域をシフトさせた領域における前記第二の像信号との相関値を、複数のシフト量に対して求める相関値取得手段と、
前記相関値に基づいて、複数の暫定シフト量を取得する暫定シフト量取得手段と、
前記複数の暫定シフト量に対応する像回復フィルタを用いて、前記第一の像信号または前記第二の像信号の少なくともいずれかを像回復する像回復手段と、
前記像回復処理に伴うコントラスト変化を解析するコントラスト解析手段と、
前記コントラスト解析の結果に基づいて、前記距離検出領域内の複数の画素について距離を決定する距離決定手段と、
を備え、
前記暫定シフト量取得手段は、前記相関値の極値を与える第一のシフト量を決定し、前記第一のシフト量を含む所定のシフト量の範囲である第一の範囲を複数の第二の範囲に分割し、それぞれの第二の範囲について暫定シフト量を取得する、
測距装置である。
第一の視点の第一の像信号と第二の視点の第二の像信号を取得する像信号取得ステップと、
距離検出領域における前記第一の像信号と、前記距離検出領域をシフトさせた領域における前記第二の像信号との相関値を、複数のシフト量に対して求める相関値取得ステップと、
前記相関値に基づいて、複数の暫定シフト量を取得する暫定シフト量取得ステップと、
前記複数の暫定シフト量に対応する像回復フィルタを用いて、前記第一の像信号または前記第二の像信号の少なくともいずれかを像回復する像回復ステップと、
前記像回復処理に伴うコントラスト変化を解析するコントラスト解析ステップと、
前記コントラスト解析の結果に基づいて、前記距離検出領域内の複数の画素について距離を決定する距離決定ステップと、
を備え、
前記暫定シフト量取得ステップでは、前記相関値の極値を与える第一のシフト量を決定し、前記第一のシフト量を含む所定のシフト量の範囲である第一の範囲を複数の第二の範囲に分割し、それぞれの第二の範囲について暫定シフト量を取得する、
測距方法である。
A(i)およびB(i)は画素領域[i]におけるA像およびB像の信号強度を表し、相関値S(k)が極小値1703をとるkより像ズレ量を算出する。画素領域[i]はA像およびB像が含まれるよう設定され、像ズレ量の算出精度を鑑みて適宜決定する。
<構成>
図1は、本実施形態にかかるステレオ撮影装置(測距装置)100の構成を示す。ステレオ撮影装置100は、視差のついた第一の視点の第一の画像信号(A像)と第二の視点の第二の画像信号(B像)を取得し、A像およびB像の間の視差に基づいて被写体までの距離を算出する。
図2は、本実施形態にかかるステレオ撮影装置100が実行する距離測定処理の制御の流れを示すフローチャートである。以下、図2のフローチャートにしたがって、ステレオ撮影装置100が行うステレオ測距について説明する。
ステップS201において、ステレオ撮影装置100は視差のついたA像・B像の2つの画像を取得する。物体面101から出た第一の光束111は結像光学系121を介して受光素子131に結像し第一の視点151の第一の画像信号(A像)を形成する。同様に、物体面101から出た第二の光束112は結像光学系122を介して受光素子132に結像し第二の視点152の第二の画像信号(B像)を形成する。A像信号取得部133が受光素子アレイ131の第一の画像信号を読み出し、B像信号取得部134が受光素子アレイの第二の画像信号を読み出す。これらの信号は、距離算出部135に入力される。
ここで、A(i)およびB(i)は画素領域[i]におけるA像およびB像の信号強度を表わす。
ステップS203〜S205において、暫定シフト量取得部137は、複数の暫定シフト量(暫定像ズレ量)を取得する。ステップS203では、暫定シフト量取得部137は、相関値演算の結果に基づいて、第一の暫定シフト量を取得する。具体的には、相関値S(k)が極小値を与えるシフト量(相関が極大となるシフト量)を、第一の暫定シフト量として決定する。相関値演算の結果が図3Cに示すものの場合には、相関値S(k)が極小値をとるk=kbが第一の暫定シフト量として決定される。
ステップS206では、像回復部138が、第二の暫定シフト量k1,k2,k3に対応する像回復フィルタを用いて、像回復処理を実施する。具体的には、像回復部138は、第二の暫定シフト量k1,k2,k3に対応する距離L1、L2、L3を、公知の手法を用いてそれぞれ算出する。算出された距離L1からL3をもとに、像回復で用いられる最適な像回復フィルタをそれぞれ選定される。像回復は公知の手法により行えばよい。例えば、距離L1,L2,L3に応じた点像分布関数をフーリエ変換し、得られた関数の逆数を逆フーリエ変換した関数を像回復フィルタとして採用し、A像341に畳込み演算す
ることで行う。像回復処理は、A像またはB像の少なくともいずれか一方に対して行えばよい。
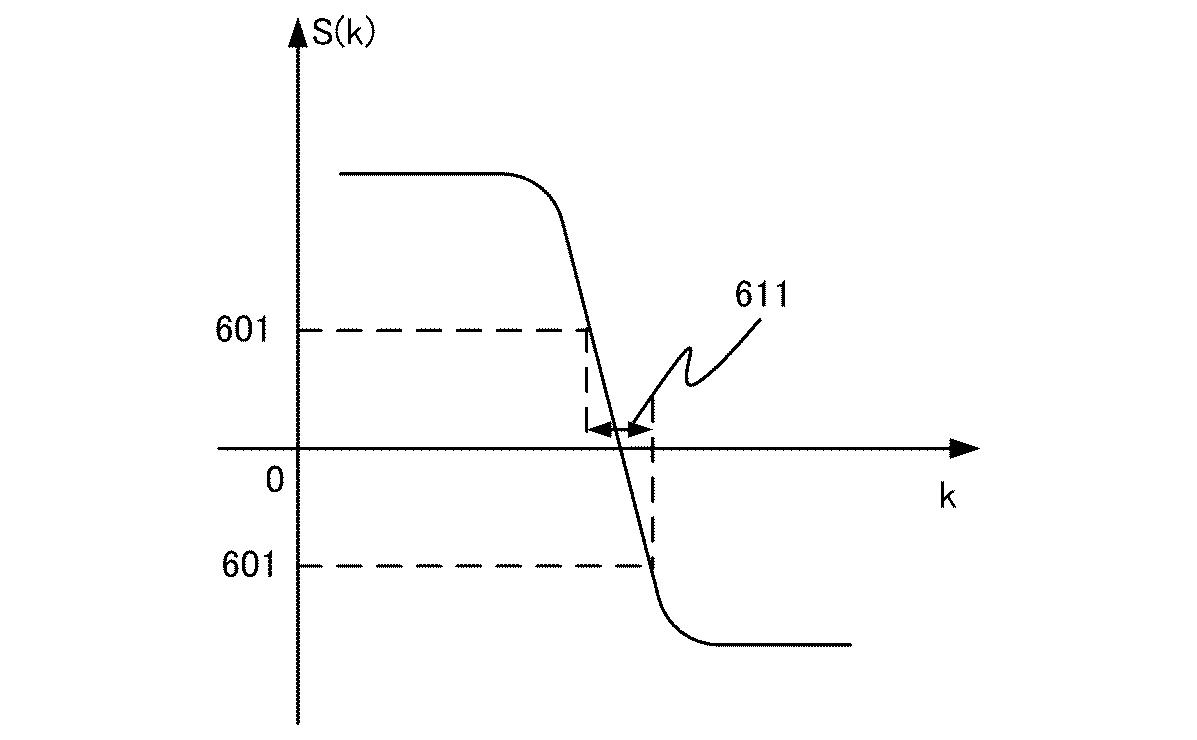
ステップS202の相関演算において、相関値として数式1に示す指標を用いたが、この手法に限る必要はない。正の極値をとる相関値を採用してもよい。この場合、相関値が極大値(最大値)をとるkの値を第一の暫定シフト量として決定すればよい。また、正負の値をとり、値ゼロが最も高い相関を表す相関値を採用してもよい。この場合の第一および第二の暫定シフト量の決定方法について図6を参照して説明する。第一の暫定シフト量は、ゼロ点を与える値kとして決定される。そして、閾値601(プラス側とマイナス側で値(絶対値)は同じでもよいし異なっていてもよい)により第一の範囲611を決定する。この第一の範囲611を分割し第二の範囲を決定し、各範囲について第二の暫定シフ
ト量を求める。
ってもよい。
本実施例は、視差像から得られる相関値に複数の極値がある場合に好適に適用可能なステレオ撮影装置(測距装置)である。本実施例にかかるステレオ撮影装置の構成は、実施例1(図1)やその変形例と同様であるため説明を省略する。実施例1等と比較すると、暫定シフト量取得部137および距離決定部140の処理内容が異なるので、主にこれらの機能部の処理について説明する。
本実施例は、実施例2と同様のステレオ撮影装置100である。本実施例にかかるステレオ撮影装置100にて、図11Aに示すような被写体パターン1102を撮影する場合を説明する。被写体パターン1102は、x方向に明暗を持つ被写体1111,1112から成る。被写体1111,1112はz方向において異なる座標に存在する。つまり遠方と近方を同時に持った被写体パターンである。図11Bは、撮影されるA像1141とB像1142を示す図である。A像1141およびB像1142に対して実施例1と同様の相関演算(ステップS202)を行うと、図11Cに示すような結果が求まる。被写体パターン1102は、図3に示す被写体パターン302よりも被写体間の距離が離れているため、2つの極値k3,k4が得られている。
kpに基づく暫定像ズレ量に対応した距離Lpを用いた像回復の結果を示す。同様に図11Bは、jqとjq+1で示される範囲内のkqに基づく暫定像ズレ量に対応した距離L
qを用いた像回復の結果を示す。信号1301は被写体1111に対応し、信号1302は被写体1112に対応する。コントラスト解析部139は、像回復前後でのコントラストの変化を解析する(S207)。
本実施例は、上記実施例1〜3に対する変形例である。実施例1〜3の方法に従って注目する被写体の距離を算出した後に、算出された距離に基づいて距離測定領域を再設定して再び距離検出を行う。これにより周期パターンを有する被写体と遠近を含む被写体を分離できる効果が得られる。
本実施例は、瞳分割により視差のついた画像を取得する撮像面測距装置である。撮像面測距により、測定系をコンパクトにできる。
図15Aは、本実施例にかかる距離算出装置を備えたデジタルカメラ1500を示す。デジタルカメラ1500は、結像光学系1520、撮像素子(受光素子)1501、距離算出部1502、画像生成部(不図示)が、カメラ筐体1530の内部に配置されて構成される。距離算出装置1510は、結像光学系1520、撮像素子1501、距離算出部1502から構成される。距離算出部1502は論理回路を用いて構成することができる
。距離算出部1502の別の形態として中央演算処理装置(CPU)と演算処理プログラムを格納するメモリとから構成してもよい。
撮像素子1501はCMOS(相補型金属酸化膜半導体)やCCD(電荷結合素子)から構成される。結像光学系1520を介して撮像素子1501上に結像した被写体像は、撮像素子1501により光電変換され、電気信号(被写体像信号ともいう)に変換される。ここで、少なくとも一部の撮像素子は、結像光学系の射出瞳上の重複を許す異なる領域から形成される第一および第二の光束を受光するように、受光面が二つ以上の領域に分割されている。
撮像素子1501内の光電変換部1561及び光電変換部1562が受光する光束について、図16を用いて説明する。図16は、結像光学系1520の射出瞳1503と、撮像素子1501中に配置される画素の代表例として緑画素1550G1についてのみ示した概略図である。図16に示した画素1550G1は、カラーフィルタ1601、マイクロレンズ1602、受光層1603から構成され、受光層1603内に光電変換部1561と光電変換部1562が含まれている。マイクロレンズ1602は、射出瞳1503と受光層1603が共役関係になるように配置されている。その結果、図16に示すように、射出瞳1503内の瞳領域1661を通過した光束1610は光電変換部1561に入射し、瞳領域1662を通過した光束1620は光電変換部1562に入射する。
136 相関値取得部 137 暫定シフト量取得部 138 像回復部
139 コントラスト解析部 140 距離決定部
Claims (16)
- 第一の視点の第一の像信号と第二の視点の第二の像信号を取得する像信号取得手段と、
距離検出領域における前記第一の像信号と、前記距離検出領域をシフトさせた領域における前記第二の像信号との相関値を、複数のシフト量に対して求める相関値取得手段と、
前記相関値に基づいて、複数の暫定シフト量を取得する暫定シフト量取得手段と、
前記複数の暫定シフト量に対応する像回復フィルタを用いて、前記第一の像信号または前記第二の像信号の少なくともいずれかを像回復する像回復手段と、
前記像回復手段による像回復処理に伴うコントラスト変化を解析するコントラスト解析手段と、
前記コントラスト解析手段によるコントラスト解析の結果に基づいて、前記距離検出領域内の複数の画素について距離を決定する距離決定手段と、
を備え、
前記暫定シフト量取得手段は、前記相関値の極値を与える第一のシフト量を決定し、前記第一のシフト量を含む所定のシフト量の範囲である第一の範囲を複数の第二の範囲に分割し、それぞれの第二の範囲について暫定シフト量を取得する、
測距装置。 - 前記距離決定手段は、前記距離検出領域内の被写体ごとに、前記像回復処理によって当該被写体のコントラストが最も高くなる像回復フィルタに対応する暫定シフト量に基づいて、当該被写体の距離を決定する、
請求項1に記載の測距装置。 - 前記相関値の極値を与える第一のシフト量が複数存在する場合、
前記暫定シフト量取得手段は、これら複数の第一のシフト量を含む所定のシフト量の範囲を前記第一の範囲として決定する、
請求項1または2に記載の測距装置。 - 前記第一の範囲は、前記第一のシフト量を含み、相関値の閾値に基づいて決定される範囲である、
請求項1〜3のいずれか1項に記載の測距装置。 - 前記距離決定手段は、前記像回復処理に伴うコントラストの変化が前記距離検出領域の
全体で同一の場合は、前記距離検出領域内に周期被写体が存在すると判断し、そうでない場合は、前記距離検出領域内に距離の異なる複数の被写体が存在すると判断する、
請求項1〜4のいずれか1項に記載の測距装置。 - 前記距離決定手段は、前記像回復処理に伴うコントラストの変化が前記距離検出領域の全体で同一の場合は、前記距離検出領域に対して一つの距離を決定する、
請求項1〜5のいずれか1項に記載の測距装置。 - 前記距離決定手段は、前記像回復処理に伴うコントラストの変化が前記距離検出領域の全体で同一の場合は、コントラストが最も高くなる像回復フィルタによる像回復処理後の像信号を対象として、前記相関値取得手段により相関値を求め、極値を与えるシフト量に基づいて、前記距離検出領域における距離を決定する、
請求項6に記載の測距装置。 - 前記距離決定手段によって、前記距離検出領域内に距離の異なる被写体が存在すると判断された場合には、
距離の等しい被写体が存在する領域を距離検出領域として再設定し、
再設定された距離検出領域を対象として、前記相関値取得手段、前記暫定シフト量取得手段、前記像回復手段、前記コントラスト解析手段、および前記距離測定手段による処理を行って距離を決定する、
請求項1〜7のいずれか1項に記載の測距装置。 - 前記距離決定手段によって、前記距離検出領域内に距離の異なる被写体が存在すると判断された場合には、
距離の等しい被写体が存在する領域を距離検出領域として再設定し、
再設定された距離検出領域を対象として、前記相関値取得手段により相関値を求め、極値を与えるシフト量に基づいて、当該再設定された距離検出領域の距離を決定する、
請求項1〜7のいずれか1項に記載の測距装置。 - 前記暫定シフト量取得手段は、前記第二の範囲の中央値を、当該第二の範囲についての暫定シフト量として取得する、
請求項1〜9のいずれか1項に記載の測距装置。 - 前記像回復手段は、前記暫定シフト量に基づいて求められる距離に対応する像回復フィルタを用いて、像回復を行う、
請求項1〜10のいずれか1項に記載の測距装置。 - 前記コントラスト解析手段は、前記像回復処理前後での前記距離検出領域内の鮮鋭度の変化を解析する、
請求項1〜11のいずれか1項に記載の測距装置。 - 前記コントラスト解析手段は、前記像回復処理前後での前記距離検出領域内のリンギングの変化を解析する、
請求項1〜11のいずれか1項に記載の測距装置。 - 前記像信号取得手段は、
結像光学系と、
複数の受光素子であって、少なくとも一部の受光素子は、前記結像光学系の射出瞳上の重複を許す異なる領域から形成される第一の光束および第二の光束をそれぞれ受光するように、受光面が二つ以上の領域に分割された受光素子と、
を備え、
受光面が分割された受光素子からの出力を元に、前記第一の像信号および前記第二の像信号を取得する、
請求項1〜13のいずれか1項に記載の測距装置。 - 第一の視点の第一の像信号と第二の視点の第二の像信号を取得する像信号取得ステップと、
距離検出領域における前記第一の像信号と、前記距離検出領域をシフトさせた領域における前記第二の像信号との相関値を、複数のシフト量に対して求める相関値取得ステップと、
前記相関値に基づいて、複数の暫定シフト量を取得する暫定シフト量取得ステップと、
前記複数の暫定シフト量に対応する像回復フィルタを用いて、前記第一の像信号または前記第二の像信号の少なくともいずれかを像回復する像回復ステップと、
前記像回復ステップにおける像回復処理に伴うコントラスト変化を解析するコントラスト解析ステップと、
前記コントラスト解析ステップにおけるコントラスト解析の結果に基づいて、前記距離検出領域内の複数の画素について距離を決定する距離決定ステップと、
を含み、
前記暫定シフト量取得ステップでは、前記相関値の極値を与える第一のシフト量を決定し、前記第一のシフト量を含む所定のシフト量の範囲である第一の範囲を複数の第二の範囲に分割し、それぞれの第二の範囲について暫定シフト量を取得する、
測距方法。 - 請求項15に記載の測距方法の各ステップをコンピュータに実行させるプログラム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013093786A JP6091318B2 (ja) | 2013-04-26 | 2013-04-26 | 測距装置およびその制御方法 |
| US14/259,190 US9438887B2 (en) | 2013-04-26 | 2014-04-23 | Depth measurement apparatus and controlling method thereof |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013093786A JP6091318B2 (ja) | 2013-04-26 | 2013-04-26 | 測距装置およびその制御方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2014215506A JP2014215506A (ja) | 2014-11-17 |
| JP2014215506A5 JP2014215506A5 (ja) | 2016-06-09 |
| JP6091318B2 true JP6091318B2 (ja) | 2017-03-08 |
Family
ID=51788923
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013093786A Expired - Fee Related JP6091318B2 (ja) | 2013-04-26 | 2013-04-26 | 測距装置およびその制御方法 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US9438887B2 (ja) |
| JP (1) | JP6091318B2 (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016224372A (ja) * | 2015-06-03 | 2016-12-28 | 株式会社ニコン | 焦点検出装置、撮像装置および電子機器 |
| WO2017169491A1 (ja) | 2016-03-30 | 2017-10-05 | 富士フイルム株式会社 | 撮像装置及びフォーカス制御方法 |
| JP6462189B2 (ja) * | 2016-07-06 | 2019-01-30 | 富士フイルム株式会社 | 合焦制御装置、合焦制御方法、合焦制御プログラム、レンズ装置、撮像装置 |
| JP6800725B2 (ja) * | 2016-12-06 | 2020-12-16 | キヤノン株式会社 | 焦点検出装置、その制御方法、プログラム及び記憶媒体 |
| KR101905142B1 (ko) | 2017-07-19 | 2018-10-25 | 한국과학기술원 | 고리형 필터를 이용한 깊이 추정 방법 및 장치 |
| JP7057090B2 (ja) * | 2017-10-11 | 2022-04-19 | キヤノン株式会社 | 測距装置および測距方法 |
| JP7192279B2 (ja) * | 2018-07-13 | 2022-12-20 | ソニーグループ株式会社 | 情報処理装置、情報処理方法、およびプログラム |
| JP2024098318A (ja) * | 2023-01-10 | 2024-07-23 | 日立Astemo株式会社 | 画像処理装置及び画像処理方法 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005037378A (ja) * | 2003-06-30 | 2005-02-10 | Sanyo Electric Co Ltd | 奥行計測方法と奥行計測装置 |
| JP5191168B2 (ja) | 2007-06-11 | 2013-04-24 | 株式会社ニコン | 焦点検出装置および撮像装置 |
| JP5402298B2 (ja) | 2009-06-23 | 2014-01-29 | 株式会社ニコン | 焦点検出装置、および、カメラ |
| JP5705096B2 (ja) * | 2011-12-02 | 2015-04-22 | キヤノン株式会社 | 画像処理装置及び画像処理方法 |
| WO2013094332A1 (ja) * | 2011-12-19 | 2013-06-27 | 富士フイルム株式会社 | 画像出力装置、方法およびプログラムならびにその記録媒体 |
| WO2013094635A1 (ja) * | 2011-12-19 | 2013-06-27 | シャープ株式会社 | 画像処理装置、撮像装置および表示装置 |
| JP6292790B2 (ja) * | 2013-08-08 | 2018-03-14 | キヤノン株式会社 | 距離検出装置、撮像装置および距離検出方法 |
-
2013
- 2013-04-26 JP JP2013093786A patent/JP6091318B2/ja not_active Expired - Fee Related
-
2014
- 2014-04-23 US US14/259,190 patent/US9438887B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US9438887B2 (en) | 2016-09-06 |
| JP2014215506A (ja) | 2014-11-17 |
| US20140320610A1 (en) | 2014-10-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6091318B2 (ja) | 測距装置およびその制御方法 | |
| US10832429B2 (en) | Device and method for obtaining distance information from views | |
| JP6509027B2 (ja) | 被写体追跡装置、光学機器、撮像装置、被写体追跡装置の制御方法、プログラム | |
| JP6643122B2 (ja) | 距離画像装置、撮像装置、および距離画像補正方法 | |
| JP5929553B2 (ja) | 画像処理装置、撮像装置、画像処理方法およびプログラム | |
| JP4915859B2 (ja) | 物体の距離導出装置 | |
| CN103238097B (zh) | 成像设备和对焦位置检测方法 | |
| JP6608148B2 (ja) | 距離情報生成装置、撮像装置、距離情報生成方法および距離情報生成プログラム | |
| JP6112769B2 (ja) | 情報処理装置、情報処理方法 | |
| JP5762211B2 (ja) | 画像処理装置および画像処理方法、プログラム | |
| CN114424516B (zh) | 图像处理装置、图像处理方法、摄像装置和存储介质 | |
| JP2015142364A (ja) | 画像処理装置、撮像装置、及び画像処理方法 | |
| JPWO2012176556A1 (ja) | 対応点探索装置、および距離測定装置 | |
| JP2014074891A (ja) | 距離検出装置、撮像装置、距離検出方法、プログラム及び記録媒体 | |
| JP6675510B2 (ja) | 被写体追跡装置およびその制御方法、画像処理装置およびその制御方法、撮像装置およびその制御方法、プログラム | |
| JP2020009180A (ja) | 画像処理装置、撮像装置、画像処理方法、及びプログラム | |
| JP2013024653A (ja) | 距離測定装置及びプログラム | |
| US11812137B2 (en) | Measurement apparatus, image capturing apparatus, control method, and recording medium | |
| JP5777031B2 (ja) | 画像処理装置、方法、及びプログラム | |
| WO2019012660A1 (ja) | 画像処理装置およびライトフィールド撮像装置 | |
| JP2016066995A (ja) | 像ズレ量算出装置、撮像装置、および像ズレ量算出方法 | |
| JPWO2019059236A1 (ja) | 形状計測センサ | |
| JP7373297B2 (ja) | 画像処理装置、画像処理方法及びプログラム | |
| JP5939945B2 (ja) | 移動物体の位置検出装置及び方法 | |
| JP2017073681A (ja) | 撮像装置および撮像処理プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160411 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160411 |
|
| TRDD | Decision of grant or rejection written | ||
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20161221 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170110 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170207 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6091318 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |