JP6086007B2 - ストレージ制御装置の制御プログラム、ストレージ制御装置の制御方法、ストレージ制御装置及びストレージシステム - Google Patents
ストレージ制御装置の制御プログラム、ストレージ制御装置の制御方法、ストレージ制御装置及びストレージシステム Download PDFInfo
- Publication number
- JP6086007B2 JP6086007B2 JP2013065204A JP2013065204A JP6086007B2 JP 6086007 B2 JP6086007 B2 JP 6086007B2 JP 2013065204 A JP2013065204 A JP 2013065204A JP 2013065204 A JP2013065204 A JP 2013065204A JP 6086007 B2 JP6086007 B2 JP 6086007B2
- Authority
- JP
- Japan
- Prior art keywords
- area
- unit
- storage
- storage device
- moving
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images













Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/06—Digital input from, or digital output to, record carriers, e.g. RAID, emulated record carriers or networked record carriers
- G06F3/0601—Interfaces specially adapted for storage systems
- G06F3/0602—Interfaces specially adapted for storage systems specifically adapted to achieve a particular effect
- G06F3/061—Improving I/O performance
- G06F3/0611—Improving I/O performance in relation to response time
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/06—Digital input from, or digital output to, record carriers, e.g. RAID, emulated record carriers or networked record carriers
- G06F3/0601—Interfaces specially adapted for storage systems
- G06F3/0628—Interfaces specially adapted for storage systems making use of a particular technique
- G06F3/0638—Organizing or formatting or addressing of data
- G06F3/0644—Management of space entities, e.g. partitions, extents, pools
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/06—Digital input from, or digital output to, record carriers, e.g. RAID, emulated record carriers or networked record carriers
- G06F3/0601—Interfaces specially adapted for storage systems
- G06F3/0628—Interfaces specially adapted for storage systems making use of a particular technique
- G06F3/0646—Horizontal data movement in storage systems, i.e. moving data in between storage devices or systems
- G06F3/0647—Migration mechanisms
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/06—Digital input from, or digital output to, record carriers, e.g. RAID, emulated record carriers or networked record carriers
- G06F3/0601—Interfaces specially adapted for storage systems
- G06F3/0668—Interfaces specially adapted for storage systems adopting a particular infrastructure
- G06F3/0671—In-line storage system
- G06F3/0683—Plurality of storage devices
- G06F3/0685—Hybrid storage combining heterogeneous device types, e.g. hierarchical storage, hybrid arrays
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Human Computer Interaction (AREA)
- Physics & Mathematics (AREA)
- General Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Debugging And Monitoring (AREA)
- Information Retrieval, Db Structures And Fs Structures Therefor (AREA)
Description

前記ストレージ制御装置に、
第1の記憶装置で使用される領域を所定の大きさで分割した複数の単位領域について単位領域ごとに入出力数を集計させ、
前記入出力数が第1の閾値より大きな単位領域を高負荷領域として特定させ、
特定させた高負荷領域と所定の距離内にある単位領域を繋ぎ合わせた拡張領域と該拡張領域とつながる他の拡張領域とを合わせた領域を移動領域として特定させ、
特定させた移動領域のデータを第1の記憶装置より高速な第2の記憶装置に移動させることを特徴とするストレージ制御装置の制御プログラム。
複数の移動領域のうち、全体の入出力数に対して入出力数の和の比率が第2の閾値を超える移動領域のデータを第2の記憶装置に移動させることを特徴とする付記1記載のストレージ制御装置の制御プログラム。
前記移動領域を一定の時間間隔で特定させ、
前記比率が所定の閾値を超える移動領域のうち、前記時間間隔で所定の回数連続して該閾値を超える移動領域のデータを第2の記憶装置に移動させることを特徴とする付記3記載のストレージ制御装置の制御プログラム。
前記回数連続して前記閾値を超える移動領域のうち、データを第2の記憶装置に移動させる時間より長い時間、入出力数が前記第1の閾値を超えると予想される移動領域のデータを第2の記憶装置に移動させることを特徴とする付記4記載のストレージ制御装置の制御プログラム。
前記ストレージ制御装置が、
第1の記憶装置で使用される領域を所定の大きさで分割した複数の単位領域について単位領域ごとに入出力数を集計し、
前記入出力数が第1の閾値より大きな単位領域を高負荷領域として特定し、
特定した高負荷領域と所定の距離内にある単位領域を繋ぎ合わせた拡張領域と該拡張領域とつながる他の拡張領域とを合わせた領域を移動領域として特定し、
特定した移動領域のデータを第1の記憶装置より高速な第2の記憶装置に移動することを特徴とするストレージ制御装置の制御方法。
前記集計部により集計された入出力数が第1の閾値より大きな単位領域を高負荷領域として特定する高負荷領域特定部と、
前記高負荷領域特定部により特定された高負荷領域と所定の距離内にある単位領域を繋ぎ合わせた拡張領域と該拡張領域とつながる他の拡張領域とを合わせた領域を移動領域として特定する移動領域特定部と、
前記移動領域特定部により特定された移動領域のデータを第1の記憶装置より高速な第2の記憶装置に移動する移動部と
を備えたことを特徴とするストレージ制御装置。
前記ストレージ制御装置は、
第1の記憶装置で使用される領域を所定の大きさで分割した複数の単位領域について単位領域ごとに入出力数を集計する集計部と、
前記集計部により集計された入出力数が第1の閾値より大きな単位領域を高負荷領域として特定する高負荷領域特定部と、
前記高負荷領域特定部により特定された高負荷領域と所定の距離内にある単位領域を繋ぎ合わせた拡張領域と該拡張領域とつながる他の拡張領域とを合わせた領域を移動領域として特定する移動領域特定部と、
前記移動領域特定部により特定された移動領域のデータを第1の記憶装置より高速な第2の記憶装置に移動する移動部と
を備えたことを特徴とするストレージシステム。
前記ストレージ制御装置に、
第1の記憶装置で使用される領域を所定の大きさで分割した複数の単位領域について単位領域ごとに入出力数を集計させ、
前記入出力数が第1の閾値より大きな単位領域を高負荷領域として特定させ、
特定させた高負荷領域と所定の距離内にある単位領域を繋ぎ合わせた拡張領域と該拡張領域とつながる他の拡張領域とを合わせた領域を移動領域として特定させ、
特定させた移動領域のデータを第1の記憶装置より高速な第2の記憶装置に移動させることを特徴とするストレージ制御装置の制御プログラムを記憶したコンピュータ読み取り可能記憶媒体。
前記CPUに、
第1の記憶装置で使用される領域を所定の大きさで分割した複数の単位領域について単位領域ごとに入出力数を集計させ、
前記入出力数が第1の閾値より大きな単位領域を高負荷領域として特定させ、
特定させた高負荷領域と所定の距離内にある単位領域を繋ぎ合わせた拡張領域と該拡張領域とつながる他の拡張領域とを合わせた領域を移動領域として特定させ、
特定させた移動領域のデータを第1の記憶装置より高速な第2の記憶装置に移動させることを特徴とするストレージ制御装置。
2 矢印
3 網掛けの正方形領域
100 階層ストレージ制御装置
110 階層管理部
111 データ収集部
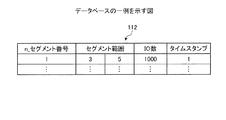
112 データベース
113 ワークロード分析部
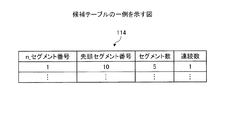
114 候補テーブル
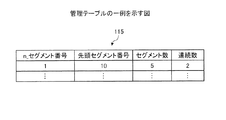
115 管理テーブル
116 移動指示部
120 階層ドライバ
121 階層テーブル
130 SSDドライバ
140 HDDドライバ
400 コンピュータ
410 メインメモリ
420 CPU
430 LANインタフェース
440 HDD
450 スーパーIO
460 DVI
470 ODD
Claims (8)
- ストレージ制御装置の制御プログラムにおいて、
前記ストレージ制御装置に、
第1の記憶装置で使用される領域を所定の大きさで分割した複数の単位領域について単位領域ごとに入出力数を集計させ、
前記入出力数が第1の閾値より大きな単位領域を高負荷領域として特定させ、
特定させた高負荷領域と所定の距離内にある単位領域をオフセットの上下両方向に繋ぎ合わせた拡張領域と該拡張領域とつながる他の拡張領域とを合わせた領域を移動領域として特定させ、
特定させた移動領域のデータを第1の記憶装置より高速な第2の記憶装置に移動させることを特徴とするストレージ制御装置の制御プログラム。 - 前記ストレージ制御装置の制御プログラムはさらに、
前記移動領域が時間の経過とともに拡大した場合に、前記ストレージ制御装置に、拡大した移動領域のデータを第2の記憶装置に移動させることを特徴とする請求項1記載のストレージ制御装置の制御プログラム。 - 前記ストレージ制御装置に、
複数の移動領域のうち、全体の入出力数に対して多い方からの入出力数の和の比率が第2の閾値を超える複数の移動領域のデータを第2の記憶装置に移動させることを特徴とする請求項1記載のストレージ制御装置の制御プログラム。 - 前記ストレージ制御装置に、
前記移動領域を一定の時間間隔で特定させ、
前記比率が所定の閾値を超える移動領域のうち、前記時間間隔で所定の回数連続して該閾値を超える移動領域のデータを第2の記憶装置に移動させることを特徴とする請求項3記載のストレージ制御装置の制御プログラム。 - 前記ストレージ制御装置に、
前記回数連続して前記閾値を超える移動領域のうち、データを第2の記憶装置に移動させる時間より長い時間、入出力数が前記第1の閾値を超えると予想される移動領域のデータを第2の記憶装置に移動させることを特徴とする請求項4記載のストレージ制御装置の制御プログラム。 - ストレージ制御装置の制御方法において、
前記ストレージ制御装置が、
第1の記憶装置で使用される領域を所定の大きさで分割した複数の単位領域について単位領域ごとに入出力数を集計し、
前記入出力数が第1の閾値より大きな単位領域を高負荷領域として特定し、
特定した高負荷領域と所定の距離内にある単位領域をオフセットの上下両方向に繋ぎ合わせた拡張領域と該拡張領域とつながる他の拡張領域とを合わせた領域を移動領域として特定し、
特定した移動領域のデータを第1の記憶装置より高速な第2の記憶装置に移動することを特徴とするストレージ制御装置の制御方法。 - 第1の記憶装置で使用される領域を所定の大きさで分割した複数の単位領域について単位領域ごとに入出力数を集計する集計部と、
前記集計部により集計された入出力数が第1の閾値より大きな単位領域を高負荷領域として特定する高負荷領域特定部と、
前記高負荷領域特定部により特定された高負荷領域と所定の距離内にある単位領域をオフセットの上下両方向に繋ぎ合わせた拡張領域と該拡張領域とつながる他の拡張領域とを合わせた領域を移動領域として特定する移動領域特定部と、
前記移動領域特定部により特定された移動領域のデータを第1の記憶装置より高速な第2の記憶装置に移動する移動部と
を備えたことを特徴とするストレージ制御装置。 - 第1の記憶装置と、第1の記憶装置より高速な第2の記憶装置と、第1の記憶装置と第2の記憶装置との間のデータの移動を制御するストレージ制御装置とを備えたストレージシステムにおいて、
前記ストレージ制御装置は、
第1の記憶装置で使用される領域を所定の大きさで分割した複数の単位領域について単位領域ごとに入出力数を集計する集計部と、
前記集計部により集計された入出力数が第1の閾値より大きな単位領域を高負荷領域として特定する高負荷領域特定部と、
前記高負荷領域特定部により特定された高負荷領域と所定の距離内にある単位領域をオフセットの上下両方向に繋ぎ合わせた拡張領域と該拡張領域とつながる他の拡張領域とを合わせた領域を移動領域として特定する移動領域特定部と、
前記移動領域特定部により特定された移動領域のデータを第1の記憶装置より高速な第2の記憶装置に移動する移動部と
を備えたことを特徴とするストレージシステム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013065204A JP6086007B2 (ja) | 2013-03-26 | 2013-03-26 | ストレージ制御装置の制御プログラム、ストレージ制御装置の制御方法、ストレージ制御装置及びストレージシステム |
| US14/157,596 US9158463B2 (en) | 2013-03-26 | 2014-01-17 | Control program of storage control device, control method of storage control device and storage control device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013065204A JP6086007B2 (ja) | 2013-03-26 | 2013-03-26 | ストレージ制御装置の制御プログラム、ストレージ制御装置の制御方法、ストレージ制御装置及びストレージシステム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014191503A JP2014191503A (ja) | 2014-10-06 |
| JP6086007B2 true JP6086007B2 (ja) | 2017-03-01 |
Family
ID=51622010
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013065204A Active JP6086007B2 (ja) | 2013-03-26 | 2013-03-26 | ストレージ制御装置の制御プログラム、ストレージ制御装置の制御方法、ストレージ制御装置及びストレージシステム |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US9158463B2 (ja) |
| JP (1) | JP6086007B2 (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6497233B2 (ja) | 2015-06-19 | 2019-04-10 | 富士通株式会社 | ストレージ制御装置、ストレージ制御プログラム、及びストレージ制御方法 |
| JP6572756B2 (ja) | 2015-11-27 | 2019-09-11 | 富士通株式会社 | 情報処理装置、ストレージ制御プログラム、及びストレージ制御方法 |
| CN108089814B (zh) * | 2016-11-23 | 2021-04-06 | 中移(苏州)软件技术有限公司 | 一种数据存储方法及装置 |
| JP6955142B2 (ja) | 2017-03-17 | 2021-10-27 | 富士通株式会社 | 情報処理装置、ストレージ制御方法およびストレージ制御プログラム |
| US10101922B1 (en) | 2017-05-31 | 2018-10-16 | International Business Machines Corporation | Addressing usage of shared SSD resources in volatile and unpredictable operating environments |
| US11243804B2 (en) * | 2019-11-19 | 2022-02-08 | Micron Technology, Inc. | Time to live for memory access by processors |
| US11199995B2 (en) | 2019-11-19 | 2021-12-14 | Micron Technology, Inc. | Time to live for load commands |
| CN113885795B (zh) * | 2021-09-23 | 2024-01-19 | 惠州Tcl移动通信有限公司 | 一种数据存储方法、装置、终端设备及存储介质 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06119244A (ja) | 1992-04-20 | 1994-04-28 | Hitachi Ltd | ディスク制御装置およびキャッシュ制御方法 |
| JP4104283B2 (ja) | 2000-12-19 | 2008-06-18 | 株式会社日立製作所 | 記憶サブシステム及び情報処理システム |
| JP2002207620A (ja) | 2001-01-10 | 2002-07-26 | Toshiba Corp | ファイルシステム及び該システムにおけるデータキャッシング方法 |
| JP2008299559A (ja) * | 2007-05-31 | 2008-12-11 | Hitachi Ltd | ストレージシステム及びストレージシステムにおけるデータ移行方法 |
| US8423604B2 (en) * | 2008-08-29 | 2013-04-16 | R. Brent Johnson | Secure virtual tape management system with balanced storage and multi-mirror options |
| US8874867B2 (en) * | 2008-11-21 | 2014-10-28 | Lsi Corporation | Identification and containment of performance hot-spots in virtual volumes |
| JP5716537B2 (ja) * | 2011-05-20 | 2015-05-13 | 日本電気株式会社 | 記憶媒体制御装置、記憶装置、記憶媒体制御方法、プログラム |
| US9052830B1 (en) * | 2011-06-30 | 2015-06-09 | Emc Corporation | Techniques for automated evaluation and movement of data between storage tiers for thin devices |
| US10180807B2 (en) * | 2011-10-12 | 2019-01-15 | Tata Consultancy Services Limited | Method and system for consolidating a plurality of heterogeneous storage systems in a data center |
| US8886781B2 (en) * | 2011-12-13 | 2014-11-11 | Microsoft Corporation | Load balancing in cluster storage systems |
| US8909859B2 (en) * | 2012-03-01 | 2014-12-09 | HGST Netherlands B.V. | Implementing large block random write hot spare SSD for SMR RAID |
| JP6065642B2 (ja) * | 2013-02-25 | 2017-01-25 | 富士通株式会社 | ストレージ制御プログラム、ストレージ制御装置、ストレージシステム、及びストレージ制御方法 |
-
2013
- 2013-03-26 JP JP2013065204A patent/JP6086007B2/ja active Active
-
2014
- 2014-01-17 US US14/157,596 patent/US9158463B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2014191503A (ja) | 2014-10-06 |
| US20140297971A1 (en) | 2014-10-02 |
| US9158463B2 (en) | 2015-10-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6086007B2 (ja) | ストレージ制御装置の制御プログラム、ストレージ制御装置の制御方法、ストレージ制御装置及びストレージシステム | |
| JP5629919B2 (ja) | 継続中の負荷の測定及びランク付けを用いてストレージプールに仮想ボリュームのホットスポットを配置する方法 | |
| US20190138517A1 (en) | Hot-Spot Adaptive Garbage Collection | |
| JP6065642B2 (ja) | ストレージ制御プログラム、ストレージ制御装置、ストレージシステム、及びストレージ制御方法 | |
| Li et al. | Mining block correlations to improve storage performance | |
| US10725907B2 (en) | Information processing apparatus for specifying data region of garbage collection, information processing system and information processing method | |
| JP2007058637A (ja) | ストレージシステム、管理計算機及びデータ移動方法 | |
| JP6299169B2 (ja) | ストレージ装置、ストレージ装置の制御方法、及びストレージ装置の制御プログラム | |
| US20200089425A1 (en) | Information processing apparatus and non-transitory computer-readable recording medium having stored therein information processing program | |
| WO2016107390A1 (zh) | 一种管理磁盘文件的方法和装置 | |
| Xia et al. | FARMER: A novel approach to file access correlation mining and evaluation reference model for optimizing peta-scale file system performance | |
| CN106486167A (zh) | 改进闪速存储器清除的方法和系统 | |
| Bhimani et al. | FIOS: Feature based I/O stream identification for improving endurance of multi-stream SSDs | |
| US9460001B2 (en) | Systems and methods for identifying access rate boundaries of workloads | |
| JP6260384B2 (ja) | ストレージ制御装置,制御プログラム,及び制御方法 | |
| US20190324677A1 (en) | Information processing apparatus | |
| Oe et al. | On-The-Fly Automated Storage Tiering (OTF-AST) | |
| Shafaei et al. | Write Amplification Reduction in {Flash-Based}{SSDs} Through {Extent-Based} Temperature Identification | |
| US10168944B2 (en) | Information processing apparatus and method executed by an information processing apparatus | |
| US10725710B2 (en) | Hierarchical storage device, hierarchical storage control device, computer-readable recording medium having hierarchical storage control program recorded thereon, and hierarchical storage control method | |
| JP7234704B2 (ja) | 情報処理装置及び情報処理プログラム | |
| JP6497233B2 (ja) | ストレージ制御装置、ストレージ制御プログラム、及びストレージ制御方法 | |
| Won et al. | Intelligent storage: Cross-layer optimization for soft real-time workload | |
| US10320907B2 (en) | Multi-stage prefetching to exploit long-term future data access sequence knowledge | |
| Liao et al. | Dynamic process migration based on block access patterns occurring in storage servers |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20151106 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160930 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20161004 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161128 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170104 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170117 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6086007 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |