JP6077808B2 - 電動キャスタ - Google Patents
電動キャスタ Download PDFInfo
- Publication number
- JP6077808B2 JP6077808B2 JP2012204709A JP2012204709A JP6077808B2 JP 6077808 B2 JP6077808 B2 JP 6077808B2 JP 2012204709 A JP2012204709 A JP 2012204709A JP 2012204709 A JP2012204709 A JP 2012204709A JP 6077808 B2 JP6077808 B2 JP 6077808B2
- Authority
- JP
- Japan
- Prior art keywords
- electrode side
- mounting plate
- steering shaft
- cover
- drive wheel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Landscapes
- Arrangement Or Mounting Of Propulsion Units For Vehicles (AREA)
Description
次に、この発明の実施形態を図面に基づいて説明する。
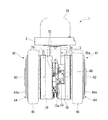
図1は、差動式キャスタの正面図、図2は、差動式キャスタの縦断面図である。
図1、図2に示すように、差動式キャスタ1は、電動車いすや搬送車として用いられる不図示の車体に取り付けられる取付板2を備えている。取付板2は、略円板状に形成されたものであって、径方向中央に、操舵軸(主軸)3を回転自在に支持するための2つの軸受4a,4bが設けられている。操舵軸3は、軸方向が重力方向、つまり上下方向に沿うように配置されている。尚、以下の説明において、重力方向上方を単に上方向、重力方向下方を単に下方向などと称して説明する。
軸本体3aの軸受4a,4bの下側に対応する部位には、フランジ部5が形成されている。また、軸本体3aの軸受4a,4bの下側に対応する部位には、止め輪6が取り付けられている。そして、これらフランジ部5と止め輪6とにより、軸受4a,4bを挟んだ状態になっており、操舵軸3の軸方向への移動が規制される。
縮径部3bには、スリップリング機構8が設けられている。スリップリング機構8は、正極側給電部9と、この正極側給電部9の下側に、正極側給電部9と重なるように配置された負極側給電部10とを備えている。
負極側回転端子16の上部に対応する位置に、負極側ホルダステー17が設けられている。この負極側ホルダステー17は、正極側ホルダステー12の下面に重なった状態で配置されており、正極側ホルダステー12と共に、取付板2の台座13に固定されている。
また、正極側ブラシ15の基端、及び負極側ブラシ19の基端には、それぞれ不図示のピグテールが接続されている。これらピグテールは、外部電源に電気的に接続されており、正極側ブラシ15、及び負極側ブラシ19を介して、正極側回転端子11、及び負極側回転端子16に電流が供給されるようになっている。
そして、正極側供給線20aの他端は、正極側回転端子11のインシュレータリング11aの挿通孔21、及び負極側回転端子16のインシュレータリング16aの挿通孔22aを通って下方に引き出されている。
この受入溝30には、全周に亘ってOリング溝30aが形成されており、ここにOリング31が装着されている。そして、カバー28は、このカバー28の外フランジ部29がOリング31の上から受入溝30に載置され、ボルト32によって取付板2に締結固定されている。これにより、取付板2とカバー28との間の気密性が確保され、外部から取付板2とカバー28とにより囲まれた内部空間K1への水や塵埃の侵入を防止できる。
図3は、第1駆動輪ユニットの斜視図、図4は、第2駆動輪ユニットの斜視図である。
図1〜図4に示すように、操舵軸3の矩形軸部3cには、第1駆動輪ユニット41、及び第2駆動輪ユニット42の2つの駆動輪ユニット41,42が操舵軸3を挟んで線対称となるように対向配置されている。
ステータホルダ47は、筒部48と筒部48の一端に一体成形された断面略L字状のブラケット部49とが一体成形されたものである。そして、筒部48の軸方向が操舵軸3の軸方向に対して直交するように配置され、且つブラケット部49を操舵軸3側に向けた状態で配置されている。
一方、ブラケット部49の他面49bには、一対のボルト孔51が形成されている。これら一対のボルト孔51の間の間隔は、一面49a側に形成されている一対の雌ネジ部50の間の間隔と同一に設定されている。また、ブラケット部49の他面49bには、ほぼ中央に貫通孔52が形成されている。
開口部のうち、対向する他面49b同士の間隔は、矩形軸部3cの長手方向の幅よりもやや大きい程度に設定されている。すなわち、開口部に矩形軸部3cを挿入した状態において、一体化された各ブラケット部49は、各々他面49bが矩形軸部3cの長手方向両端に接するように配置される。
ここで、ベース部66の基板収納部68を避けた箇所は、空きスペースとなる。この空きスペースは、各駆動輪ユニット41,42のステータホルダ47のブラケット部49同士を、ボルト33を用いて締結固定する際の作業スペースとして利用することができる。このため、ブラケット部49同士の組み付け作業性が向上する。
また、空きスペースは、後述の配線接続スペース80としても機能する(詳細は後述する)。
第1正極側リード線73aの他端には、スリップリング機構8から引き出されている正極側供給線20aの他端が防水コネクタ75を介して接続されている。
第2駆動輪ユニット42の駆動制御基板69には、横基板69aの一部に、正極側リード線73の一端が接続されている。この正極側リード線73の他端は、配線接続スペース80まで引き出されている。そして、防水コネクタ75を介し、第1駆動輪ユニット41の第2正極側リード線73bから延びる不図示の渡り線に接続されている。
第1負極側リード線74aの他端には、スリップリング機構8から引き出されている負極側供給線20bの他端が防水コネクタ75を介して接続されている。
第1駆動輪ユニット41の駆動制御基板69には、横基板69aの一部に、負極側リード線74の一端が接続されている。この負極側リード線74の他端は、配線接続スペース80まで引き出されている。そして、防水コネクタ75を介し、第2駆動輪ユニット42の第2負極側リード線74bから延びる不図示の渡り線に接続されている。
尚、駆動制御基板69を平面視略L字状に形成するために、駆動制御基板69には、PLC通信を行うためのPLC通信用コイルや、防水コネクタ75の実装スペースが設けられていない。
拡径部61bには、略円筒状に形成されたアタッチメント62が外嵌固定されている。アタッチメント62の外径は、ステータ46のステータコア56の内径よりもやや小さくなる程度に設定されている。これにより、アタッチメント62は、ステータ46と干渉することなく回転する。
フライホイール64の周壁64bはステータ46の外周を覆った状態になっており、その内周面のステータ46に対応する位置に、複数の永久磁石65が周方向に磁極が順番となるように設けられている。また、フライホイール64の外周面にタイヤ45が設けられている。
したがって、上述の実施形態によれば、センサマグネット25、スリップリング機構8を覆うように有底筒状のカバー28を設け、取付板2にカバー28をOリング31を介して締結固定しているので、外部からカバー28の内部への水や塵埃の侵入を防止できる。
例えば、上述の実施形態では、スリップリング機構8には、正極側ブラシ15、及び負極側ブラシ19がそれぞれ4つずつ設けられている場合について説明した。しかしながら、これに限られるものではなく、少なくとも正極側ブラシ15、及び負極側ブラシ19がそれぞれ1つずつ設けられていればよい。好ましくは、正極側ブラシ15、及び負極側ブラシ19をそれぞれ偶数個設け、操舵軸3を中心に対向配置させることにより、操舵軸3に偏った荷重がかかるのを防止でき、操舵軸3の回転負荷を低減することができる。
2 取付板
3 操舵軸
9 正極側給電部(給電部)
10 負極側給電部(給電部)
20a 正極側供給線(リード線)
20b 負極側供給線(リード線)
23 正極側溝(配索溝)
24 負極側溝(配索溝)
27 ロータリエンコーダ(エンコーダ)
28 カバー
31 Oリング(シール部材)
43 ブラシレスモータ(電動モータ)
45 タイヤ(駆動輪)
64 フライホイール(駆動輪)
K1 内部空間
Claims (1)
- 取付板に回転可能に支持される操舵軸と、
前記操舵軸の前記取付板よりも一端側に設けられる駆動輪と、
前記操舵軸の前記取付板よりも一端側に設けられ、前記駆動輪を駆動するための電動モータと、
前記操舵軸の前記取付板よりも他端側に設けられ、前記電動モータに電力を供給するための給電部と、
前記操舵軸の前記取付板よりも他端側に設けられ、前記操舵軸の回転角度を検出するためのエンコーダと、
前記操舵軸の前記取付板よりも他端側に設けられ、前記給電部、及び前記エンコーダを外側から覆うように有底筒状で、且つ内部の気密性を確保可能なカバーと、
前記カバーと前記取付板との間に設けられ、これらカバーと取付板との間のシール性を確保するためのシール部材とを備え、
前記操舵軸の外周面には、前記給電部と前記電動モータとを電気的に接続するリード線を配索するための配索溝が、前記取付板、及び前記カバーにより囲まれた空間と外部とを連通するように形成され、
前記配索溝は、前記空間と外部との通気を行う通気口としての機能を有することを特徴とする電動キャスタ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012204709A JP6077808B2 (ja) | 2012-09-18 | 2012-09-18 | 電動キャスタ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012204709A JP6077808B2 (ja) | 2012-09-18 | 2012-09-18 | 電動キャスタ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014058251A JP2014058251A (ja) | 2014-04-03 |
| JP6077808B2 true JP6077808B2 (ja) | 2017-02-08 |
Family
ID=50615148
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012204709A Active JP6077808B2 (ja) | 2012-09-18 | 2012-09-18 | 電動キャスタ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6077808B2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5931663B2 (ja) * | 2012-09-18 | 2016-06-08 | 株式会社ミツバ | 電動キャスタ |
| CN104149610B (zh) * | 2014-08-08 | 2016-11-23 | 北京理工大学 | 4×4车辆轮边电机动力耦合传动系统 |
| KR101840676B1 (ko) | 2016-11-08 | 2018-03-21 | 주식회사 삼송캐스터 | 모터 내장형 이송 캐스터 |
| WO2019144748A1 (zh) * | 2018-01-23 | 2019-08-01 | 宁波一舟精密机械制造有限公司 | 脚轮结构及机柜 |
| CN113291096A (zh) * | 2021-06-30 | 2021-08-24 | 广西起辉科技开发有限公司 | 一种自由转动电驱动万向轮 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008213570A (ja) * | 2007-03-01 | 2008-09-18 | Mitsuba Corp | 差動式キャスタ |
| JP2009173068A (ja) * | 2008-01-22 | 2009-08-06 | Mitsuba Corp | 搬送装置 |
| JP5654819B2 (ja) * | 2010-09-27 | 2015-01-14 | 株式会社ミツバ | 差動式キャスタ、及び電動車いす |
-
2012
- 2012-09-18 JP JP2012204709A patent/JP6077808B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2014058251A (ja) | 2014-04-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6578642B2 (ja) | モータ | |
| JP6077808B2 (ja) | 電動キャスタ | |
| US8253284B2 (en) | Electric motor and electric motor vehicle | |
| JP6635338B2 (ja) | 回転装置 | |
| US20180115224A1 (en) | Motor | |
| CN101371418A (zh) | 旋转电机 | |
| JP2016226176A (ja) | モータ | |
| JP2012044755A (ja) | モータ | |
| JP6520033B2 (ja) | モータ | |
| US20200244133A1 (en) | Drive device | |
| CN113228476B (zh) | 马达 | |
| JP6559370B1 (ja) | エンコーダおよびサーボモータ | |
| JP2003319631A (ja) | ブラシレスモータ | |
| JP3985815B2 (ja) | 電動アクチュエータ | |
| JP2008182834A (ja) | 電動モータのシール構造 | |
| JP2008213570A (ja) | 差動式キャスタ | |
| US20110241499A1 (en) | Brushless dc motor | |
| JP5931663B2 (ja) | 電動キャスタ | |
| KR100910548B1 (ko) | 브러쉬리스 직류모터 | |
| JP4198723B2 (ja) | 電動パワーステアリング装置用ブラシレスモータ | |
| JP4234447B2 (ja) | ブラシホルダの製造方法、ブラシホルダ及びモータ | |
| US11130515B2 (en) | Cover assembly, motor and electric steering device including same | |
| EP3843245B1 (en) | In-wheel motor | |
| JP3645508B2 (ja) | モータ | |
| JP2008228367A (ja) | ブラシレスモータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150619 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160628 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160824 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170104 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170113 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6077808 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |