JP6076852B2 - カメラシステム、その制御方法およびその制御プログラム - Google Patents
カメラシステム、その制御方法およびその制御プログラム Download PDFInfo
- Publication number
- JP6076852B2 JP6076852B2 JP2013145584A JP2013145584A JP6076852B2 JP 6076852 B2 JP6076852 B2 JP 6076852B2 JP 2013145584 A JP2013145584 A JP 2013145584A JP 2013145584 A JP2013145584 A JP 2013145584A JP 6076852 B2 JP6076852 B2 JP 6076852B2
- Authority
- JP
- Japan
- Prior art keywords
- map
- unit
- area
- camera system
- image
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images












Landscapes
- Studio Devices (AREA)
- Indication In Cameras, And Counting Of Exposures (AREA)
- Camera Data Copying Or Recording (AREA)
Description
また、本発明は、対象物を撮影し画像を取得するカメラシステムの制御方法であって、好ましくは、記憶部が前記対象物を表す地図を記憶し、撮影位置と撮影姿勢を変更可能な撮影部が前記対象物を撮影して画像へ変換し、演算部が前記撮影部の位置姿勢を推定し、前記撮影部の位置姿勢と前記地図とに基づき前記地図上の複数の点の中から前記撮影部に最も近い点を含む領域を被撮影領域として特定し、前記地図において前記被撮影領域に対応する箇所を図示する撮影情報含有地図を作成し、表示部が前記撮影情報含有地図を表示すること、を特徴とする。
また、本発明は、対象物を撮影し画像を取得するカメラシステムの制御プログラムであって、好ましくは、前記対象物を表す地図を記憶し、撮影位置と撮影姿勢に基づいて前記対象物を撮影して画像へ変換し、前記撮影部の位置姿勢を推定し、前記撮影部の位置姿勢と前記地図とに基づき前記地図上の複数の点の中から前記撮影部に最も近い点を含む領域を被撮影領域として特定し、前記地図において前記被撮影領域に対応する箇所を図示する撮影情報含有地図を作成し、前記撮影情報含有地図を表示すること、を特徴とする。
(第1の実施の形態)
以下、さらに具体的に構造物を点検するための画像を取得する点検カメラシステム200を例として説明する。
(第2の実施の形態)
第2の実施の形態では、構造物を点検するための画像を取得する点検カメラシステムの他の例を説明する。
なお、上記実施の形態では構造物の点検を例に説明したが、撮影部で撮影できるものであれば構造物以外の対象物であっても良く、撮影した画像の利用目的は点検以外であっても良い。また、プログラムそれぞれの代わりに回路で機能を実現しても良い。
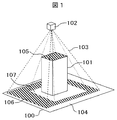
101 直方体の部材
102 カメラ
103 視界
104 未撮影領域
105 被撮影領域
106 被撮影領域
107 未撮影領域
200 点検カメラシステム
201 撮影部
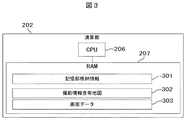
202 演算部
203 記憶部
204 表示部
205 入力部
206 CPU
207 RAM
301 記憶部格納情報
302 撮影情報含有地図
303 画面データ
401 共通プログラム
402 共通パラメータ
403 撮影部位置姿勢推定プログラム
501 撮影部通信プログラム
502 表示部通信プログラム
503 入力部通信プログラム
504 撮影部制御プログラム
505 表示部制御プログラム
506 被撮影微小領域特定プログラム
507 撮影情報含有地図作成プログラム
508 画面データ作成プログラム
509 地図表示用仮想カメラ焦点距離変更プログラム
510 地図表示用仮想カメラ位置姿勢変更プログラム
601 画面中地図表示用エリア
602 画面中画像表示用エリア
603 画面中撮影ON/OFFボタンエリア
604 カーソル位置
605 撮影ON/OFF
606 ユーザインターフェース画像群
607 撮影済み領域図示用色情報
608 撮影部画像サイズ
609 撮影部内部パラメータ
610 地図
611 撮影済み画像群
612 撮影情報群
613 前回推定した撮影部の位置姿勢
614 地図表示用仮想カメラ焦点距離
615 地図表示用仮想カメラ位置姿勢
901 表示部の画面上のエリア
902 表示部の画面上のエリア
903 表示部の画面上のエリア
904 表示部の画面上の表示ウィンドウ
905 カーソル画像
906 表示部の画面上のエリア
907 撮影ON/OFFボタン画像
1100 点検カメラシステム
1101 距離計測部
1102 演算部
1103 記憶部
1104 RAM
1201 記憶部格納情報
1202 最新部分地図
1301 距離計測部通信プログラム
1302 距離計測部制御プログラム
1303 撮影部位置姿勢推定プログラム
1304 地図更新プログラム
1305 撮影部と距離計測部との相対位置姿勢
1306 撮影部位置姿勢群
Claims (14)
- 対象物を撮影し画像を取得するカメラシステムであって、
撮影位置と撮影姿勢を変更可能であり、前記対象物を撮影して画像へ変換する撮影部と、
前記対象物を表す地図を記憶する記憶部と、
前記撮影部の位置姿勢を推定し、前記撮影部の位置姿勢と前記地図とに基づき前記地図上の複数の点の中から前記撮影部に最も近い点を含む領域を被撮影領域として特定し、前記地図において前記被撮影領域に対応する箇所を図示する撮影情報含有地図を作成する演算部と、
前記撮影情報含有地図を表示する表示部と、
を備えたことを特徴とするカメラシステム。 - 請求項1に記載のカメラシステムであって、
3次元的な領域で構成された前記地図を記憶する前記記憶部と、
前記撮影部から前記地図への半直線を定義し、前記半直線と前記地図の複数の前記領域との交点を前記地図上の複数の点とする前記演算部と、
を備えたことを特徴とするカメラシステム。 - 請求項1または2に記載のカメラシステムであって、
前記撮影部が前記対象物を撮影した複数の画像に対し個別に前記被撮影領域を特定し、前記地図に対し全ての前記被撮影領域に対応する箇所を図示する撮影情報含有地図を作成する前記演算部
を備えたことを特徴とするカメラシステム。 - 請求項3に記載のカメラシステムであって、
前記複数の画像の前記撮影の時刻に応じて個別に前記被撮影領域を特定し、前記時刻に応じて少なくとも一つの前記被撮影領域を他の前記被撮影領域とは異なる図示とする撮影情報含有地図を作成する前記演算部
を備えたことを特徴とするカメラシステム。 - 請求項3または4に記載のカメラシステムであって、
前記表示部に表示された前記撮影情報含有地図の前記被撮影領域を指示されると、前記指示された前記被撮影領域に対応する前記撮影した画像を前記複数の画像の中から特定する前記演算部と、
前記撮影情報含有地図と共に前記撮影した画像を表示する前記表示部と、
を備えたことを特徴とするカメラシステム。 - 請求項1〜5のいずれか1項に記載のカメラシステムであって、
重点エリアを記憶する記憶部と、
前記重点エリアに対応する箇所を、前記被撮影領域とは異なる図示とする撮影情報含有地図を作成する前記演算部と、
を備えたことを特徴とするカメラシステム。 - 請求項2に記載のカメラシステムであって、
前記画像のうち予め定められた幅の外枠部分を前記被撮影領域とは異なる図示とする撮影情報含有地図を作成する、あるいは前記領域の法線と前記撮影部から前記領域へ向かう前記半直線の方向との成す角に基づき前記被撮影領域としての異なる図示とする撮影情報含有地図を作成する、あるいは前記領域の面積を前記領域に対応する前記画像の画素数で除算した画素当たりの面積に基づき前記被撮影領域としての異なる図示とする撮影情報含有地図を作成する前記演算部
を備えたことを特徴とするカメラシステム。 - 請求項2に記載のカメラシステムであって、
前記画像のうち予め定められた幅の外枠部分を未撮影とみなして前記被撮影領域を特定する、あるいは前記領域の法線と前記撮影部から前記領域へ向かう前記半直線の方向との成す角に基づき未撮影とみなして前記被撮影領域を特定する、あるいは前記領域の面積を前記領域に対応する前記画像の画素数で除算した画素当たりの面積に基づき未撮影とみなして前記被撮影領域を特定する前記演算部
を備えたことを特徴とするカメラシステム。 - 請求項2に記載のカメラシステムであって、
前記領域の法線と前記撮影部から前記領域へ向かう前記半直線の方向との成す角あるいは前記領域の面積を前記領域に対応する前記画像の画素数で除算した画素当たりの面積に基づき前記領域を含む前記画像の評価値を算出する前記演算部と、
前記評価値の高い順に前記画像を表示する前記表示部と、
を備えたことを特徴とするカメラシステム。 - 請求項1〜9のいずれか1項に記載のカメラシステムであって、
前記画像と前記地図とを照合することで前記撮影部の位置姿勢を推定する前記演算部
を備えたことを特徴とするカメラシステム。 - 請求項1〜9のいずれか1項に記載のカメラシステムであって、
前記撮影部の周りの空間の部分的な形状を取得する距離計測部をさらに備え
前記距離計測部の計測結果と前記地図とを照合することで前記距離計測部の位置姿勢を推定する前記演算部と、
を備えたことを特徴とするカメラシステム。 - 請求項11に記載のカメラシステムであって、
前記距離計測部の計測結果に基づき前記地図を更新する前記演算部
を備えたことを特徴とするカメラシステム。 - 対象物を撮影し画像を取得するカメラシステムの制御方法であって、
記憶部は前記対象物を表す地図を記憶し、
撮影位置と撮影姿勢を変更可能な撮影部は前記対象物を撮影して画像へ変換し、
演算部は前記撮影部の位置姿勢を推定し、前記撮影部の位置姿勢と前記地図とに基づき前記地図上の複数の点の中から前記撮影部に最も近い点を含む領域を被撮影領域として特定し、前記地図において前記被撮影領域に対応する箇所を図示する撮影情報含有地図を作成し、
表示部は前記撮影情報含有地図を表示すること
を特徴とするカメラシステムの制御方法。 - 撮影位置と撮影姿勢を変更可能であり、対象物を撮影して画像へ変換する撮影部を備えたカメラシステムで実行可能な制御プログラムであって、
前記対象物を表す地図を記憶し、
撮影位置と撮影姿勢に基づいて前記対象物を撮影して画像へ変換し、
前記撮影部の位置姿勢を推定し、前記撮影部の位置姿勢と前記地図とに基づき前記地図上の複数の点の中から前記撮影部に最も近い点を含む領域を被撮影領域として特定し、前記地図において前記被撮影領域に対応する箇所を図示する撮影情報含有地図を作成し、
前記撮影情報含有地図を表示すること
を特徴とするカメラシステムの制御プログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013145584A JP6076852B2 (ja) | 2013-07-11 | 2013-07-11 | カメラシステム、その制御方法およびその制御プログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013145584A JP6076852B2 (ja) | 2013-07-11 | 2013-07-11 | カメラシステム、その制御方法およびその制御プログラム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2015019270A JP2015019270A (ja) | 2015-01-29 |
| JP2015019270A5 JP2015019270A5 (ja) | 2016-03-10 |
| JP6076852B2 true JP6076852B2 (ja) | 2017-02-08 |
Family
ID=52439878
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013145584A Active JP6076852B2 (ja) | 2013-07-11 | 2013-07-11 | カメラシステム、その制御方法およびその制御プログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6076852B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6623568B2 (ja) * | 2015-06-05 | 2019-12-25 | カシオ計算機株式会社 | 撮像装置、撮像制御方法及びプログラム |
| CN108028881A (zh) | 2015-09-25 | 2018-05-11 | 富士胶片株式会社 | 摄像辅助系统、装置及方法、以及摄像终端 |
| TWI634403B (zh) * | 2017-01-26 | 2018-09-01 | 好樣科技有限公司 | 自動清潔機及其控制方法 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007266667A (ja) * | 2006-03-27 | 2007-10-11 | Nec Electronics Corp | カメラ付き携帯機器、その制御方法及びその撮影支援方法 |
| JP4960659B2 (ja) * | 2006-06-20 | 2012-06-27 | クボテック株式会社 | 3次元仮想空間を利用したビデオカメラ撮影制御装置およびビデオカメラ撮影制御方法 |
| JP5091099B2 (ja) * | 2008-12-12 | 2012-12-05 | 株式会社キーエンス | 撮像装置 |
| JP2010256253A (ja) * | 2009-04-27 | 2010-11-11 | Topcon Corp | 三次元計測用画像撮影装置及びその方法 |
-
2013
- 2013-07-11 JP JP2013145584A patent/JP6076852B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2015019270A (ja) | 2015-01-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6642968B2 (ja) | 情報処理装置、情報処理方法、プログラム | |
| CN108090959B (zh) | 室内外一体建模方法及装置 | |
| JP5538667B2 (ja) | 位置姿勢計測装置及びその制御方法 | |
| JP5097765B2 (ja) | 計測方法および計測プログラムならびに計測装置 | |
| US11783580B2 (en) | Input apparatus, input method of input apparatus, and output apparatus | |
| JP6489566B2 (ja) | 3次元計測装置及びその計測支援処理方法 | |
| JP5566281B2 (ja) | 旋回型カメラの設置条件特定装置および方法ならびに当該設置条件特定装置を備えるカメラ制御システム | |
| CN109840950B (zh) | 得到真实尺寸3d模型的方法、勘测装置 | |
| KR102029895B1 (ko) | 구조물 손상 정보가 매핑된 3차원 모델 생성 방법 및 이를 실행시키는 프로그램이 기록된 기록 매체 | |
| CN104802186A (zh) | 制作用于拍摄工件的机器人程序的机器人程序设计装置 | |
| US20180204387A1 (en) | Image generation device, image generation system, and image generation method | |
| JP6174968B2 (ja) | 撮像シミュレーション装置 | |
| JP2019027817A (ja) | 施工出来高データ取得システム | |
| JP6076852B2 (ja) | カメラシステム、その制御方法およびその制御プログラム | |
| JP2017151026A (ja) | 三次元情報取得装置、三次元情報取得方法、及びプログラム | |
| JP2009175012A (ja) | 計測装置および計測方法 | |
| JP5862865B2 (ja) | 合成画像表示装置及び合成画像表示プログラム | |
| JP2013092888A (ja) | データ処理装置 | |
| JP6163391B2 (ja) | 水中移動体の位置検知装置 | |
| JP6770826B2 (ja) | 構造物の配置位置測定用の自動視準方法及び自動視準装置 | |
| JP2020060907A (ja) | 避雷保護範囲生成システムおよびプログラム | |
| JP7437930B2 (ja) | 移動体及び撮像システム | |
| JP7044331B2 (ja) | 橋梁などの構造物を効率的に検査するための画像処理システム、画像処理方法及びプログラム | |
| JP6389120B2 (ja) | データ処理装置、データ処理方法、及び、プログラム | |
| JP6861592B2 (ja) | データ間引き装置、測量装置、測量システム及びデータ間引き方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160122 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160122 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20161012 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20161025 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161118 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20161220 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170111 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6076852 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |