JP6071340B2 - 組織との直接的な接触に適合されたカテーテル - Google Patents
組織との直接的な接触に適合されたカテーテル Download PDFInfo
- Publication number
- JP6071340B2 JP6071340B2 JP2012191328A JP2012191328A JP6071340B2 JP 6071340 B2 JP6071340 B2 JP 6071340B2 JP 2012191328 A JP2012191328 A JP 2012191328A JP 2012191328 A JP2012191328 A JP 2012191328A JP 6071340 B2 JP6071340 B2 JP 6071340B2
- Authority
- JP
- Japan
- Prior art keywords
- distal
- catheter
- microelement
- distal end
- outer shell
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- WABPQHHGFIMREM-UHFFFAOYSA-N lead(0) Chemical compound [Pb] WABPQHHGFIMREM-UHFFFAOYSA-N 0.000 claims description 24
- 239000012530 fluid Substances 0.000 claims description 23
- 230000002262 irrigation Effects 0.000 claims description 20
- 238000003973 irrigation Methods 0.000 claims description 20
- 239000011810 insulating material Substances 0.000 claims description 3
- BASFCYQUMIYNBI-UHFFFAOYSA-N platinum Chemical compound [Pt] BASFCYQUMIYNBI-UHFFFAOYSA-N 0.000 description 16
- 239000000463 material Substances 0.000 description 13
- 239000004814 polyurethane Substances 0.000 description 9
- 229920002635 polyurethane Polymers 0.000 description 9
- KDLHZDBZIXYQEI-UHFFFAOYSA-N Palladium Chemical compound [Pd] KDLHZDBZIXYQEI-UHFFFAOYSA-N 0.000 description 8
- 238000002679 ablation Methods 0.000 description 8
- 239000011248 coating agent Substances 0.000 description 8
- 238000000576 coating method Methods 0.000 description 8
- 230000006835 compression Effects 0.000 description 8
- 238000007906 compression Methods 0.000 description 8
- 239000000853 adhesive Substances 0.000 description 7
- 230000001070 adhesive effect Effects 0.000 description 7
- 238000001816 cooling Methods 0.000 description 6
- 229910052697 platinum Inorganic materials 0.000 description 6
- 238000002847 impedance measurement Methods 0.000 description 5
- 239000004593 Epoxy Substances 0.000 description 4
- 239000004642 Polyimide Substances 0.000 description 4
- 230000008878 coupling Effects 0.000 description 4
- 238000010168 coupling process Methods 0.000 description 4
- 238000005859 coupling reaction Methods 0.000 description 4
- 229910052741 iridium Inorganic materials 0.000 description 4
- GKOZUEZYRPOHIO-UHFFFAOYSA-N iridium atom Chemical compound [Ir] GKOZUEZYRPOHIO-UHFFFAOYSA-N 0.000 description 4
- 239000007788 liquid Substances 0.000 description 4
- 230000002093 peripheral effect Effects 0.000 description 4
- 229920001721 polyimide Polymers 0.000 description 4
- 230000003014 reinforcing effect Effects 0.000 description 4
- 239000010935 stainless steel Substances 0.000 description 4
- 229910001220 stainless steel Inorganic materials 0.000 description 4
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 3
- 229920002614 Polyether block amide Polymers 0.000 description 3
- 239000004809 Teflon Substances 0.000 description 3
- 229920006362 Teflon® Polymers 0.000 description 3
- 239000004020 conductor Substances 0.000 description 3
- 230000009977 dual effect Effects 0.000 description 3
- 238000000034 method Methods 0.000 description 3
- 229910052763 palladium Inorganic materials 0.000 description 3
- 239000000523 sample Substances 0.000 description 3
- 230000002411 adverse Effects 0.000 description 2
- 229910045601 alloy Inorganic materials 0.000 description 2
- 239000000956 alloy Substances 0.000 description 2
- 238000013459 approach Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 239000008393 encapsulating agent Substances 0.000 description 2
- 210000005246 left atrium Anatomy 0.000 description 2
- 230000003902 lesion Effects 0.000 description 2
- 238000013507 mapping Methods 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 229910052751 metal Inorganic materials 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 150000001247 metal acetylides Chemical class 0.000 description 2
- 238000013021 overheating Methods 0.000 description 2
- 239000004033 plastic Substances 0.000 description 2
- 229920003023 plastic Polymers 0.000 description 2
- 125000006850 spacer group Chemical group 0.000 description 2
- 0 CCC12[C@@](C3)C1C(C)C(CCC([C@](*)CC1(CC4(CC(*)C5)CCCCC5(CC)C4)CC1)=C1C4=C1CC4)*3CCCC2 Chemical compound CCC12[C@@](C3)C1C(C)C(CCC([C@](*)CC1(CC4(CC(*)C5)CCCCC5(CC)C4)CC1)=C1C4=C1CC4)*3CCCC2 0.000 description 1
- 229910001006 Constantan Inorganic materials 0.000 description 1
- 239000004696 Poly ether ether ketone Substances 0.000 description 1
- 206010003119 arrhythmia Diseases 0.000 description 1
- 230000003126 arrythmogenic effect Effects 0.000 description 1
- JUPQTSLXMOCDHR-UHFFFAOYSA-N benzene-1,4-diol;bis(4-fluorophenyl)methanone Chemical compound OC1=CC=C(O)C=C1.C1=CC(F)=CC=C1C(=O)C1=CC=C(F)C=C1 JUPQTSLXMOCDHR-UHFFFAOYSA-N 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 230000036760 body temperature Effects 0.000 description 1
- 238000009529 body temperature measurement Methods 0.000 description 1
- 230000007797 corrosion Effects 0.000 description 1
- 238000005260 corrosion Methods 0.000 description 1
- 210000005069 ears Anatomy 0.000 description 1
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 1
- 229910052737 gold Inorganic materials 0.000 description 1
- 239000010931 gold Substances 0.000 description 1
- 208000014674 injury Diseases 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 229940113601 irrigation solution Drugs 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000002107 myocardial effect Effects 0.000 description 1
- XEPXGZZWVKNRGS-GQYPCLOQSA-N n-[(3r,4s,5s,6r)-3,4,5-trihydroxy-6-(hydroxymethyl)oxan-2-yl]octanamide Chemical compound CCCCCCCC(=O)NC1O[C@H](CO)[C@@H](O)[C@H](O)[C@H]1O XEPXGZZWVKNRGS-GQYPCLOQSA-N 0.000 description 1
- 229910001000 nickel titanium Inorganic materials 0.000 description 1
- HLXZNVUGXRDIFK-UHFFFAOYSA-N nickel titanium Chemical compound [Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni] HLXZNVUGXRDIFK-UHFFFAOYSA-N 0.000 description 1
- 231100000252 nontoxic Toxicity 0.000 description 1
- 230000003000 nontoxic effect Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- 229920002530 polyetherether ketone Polymers 0.000 description 1
- 230000001681 protective effect Effects 0.000 description 1
- 239000000565 sealant Substances 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 238000001356 surgical procedure Methods 0.000 description 1
- 230000000451 tissue damage Effects 0.000 description 1
- 231100000827 tissue damage Toxicity 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
- 230000008733 trauma Effects 0.000 description 1
- 210000005166 vasculature Anatomy 0.000 description 1
Images































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B18/1492—Probes or electrodes therefor having a flexible, catheter-like structure, e.g. for heart ablation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B18/1477—Needle-like probes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B18/1482—Probes or electrodes therefor having a long rigid shaft for accessing the inner body transcutaneously in minimal invasive surgery, e.g. laparoscopy
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00005—Cooling or heating of the probe or tissue immediately surrounding the probe
- A61B2018/00011—Cooling or heating of the probe or tissue immediately surrounding the probe with fluids
- A61B2018/00029—Cooling or heating of the probe or tissue immediately surrounding the probe with fluids open
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00696—Controlled or regulated parameters
- A61B2018/00702—Power or energy
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00773—Sensed parameters
- A61B2018/00791—Temperature
- A61B2018/00797—Temperature measured by multiple temperature sensors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00773—Sensed parameters
- A61B2018/00791—Temperature
- A61B2018/00821—Temperature measured by a thermocouple
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00773—Sensed parameters
- A61B2018/00839—Bioelectrical parameters, e.g. ECG, EEG
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00773—Sensed parameters
- A61B2018/00875—Resistance or impedance
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2218/00—Details of surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2218/001—Details of surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body having means for irrigation and/or aspiration of substances to and/or from the surgical site
- A61B2218/002—Irrigation
Description
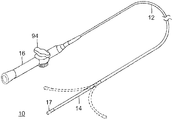
(1) カテーテルであって、
細長い本体と、
遠位電極アセンブリであって、
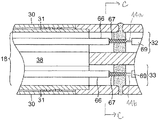
内側チャンバを有するように構成されるとともに近位部分と遠位部分とを画定する壁を有する外殻を有する電極であって、前記遠位部分の前記壁が少なくとも1個の孔を有する、電極と、
前記内側チャンバを通じて前記近位部分と前記遠位部分との間に延びる微小要素であって、前記微小要素が、前記少なくとも1個の孔に受容される遠位端を有し、前記遠位端が、前記壁の外表面と少なくとも同じ広がりで延在する、微小要素と、を有する、遠位電極アセンブリと、
制御ハンドルと、を備え、
前記微小要素が、管腔を有する管、及び前記管腔を通じて延びる少なくとも1本のワイヤを含む、カテーテル。
(2) 前記チャンバが流体を受容するように適合され、更に前記チャンバが、前記チャンバの内部から前記チャンバの外部へと流体を流すように構成された複数の灌注孔を有する、実施態様1に記載のカテーテル。
(3) 前記微小要素の前記遠位端が、前記外殻の前記壁の外側に露出した部分を含む、実施態様2に記載のカテーテル。
(4) 前記微小要素がその遠位端に微小電極要素を有し、前記少なくとも1本のワイヤが前記微小電極要素に取り付けられる、実施態様1に記載のカテーテル。
(5) 前記微小要素が、温度感知に適合された少なくとも2本のワイヤを有する、実施態様1に記載のカテーテル。
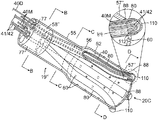
(6) それぞれが遠位端を有する複数の微小要素を更に備え、前記微小要素の前記遠位端が、前記電極の長手方向軸を中心として、前記電極の前記遠位部分に放射状のパターンで配置される、実施態様1に記載のカテーテル。
(7) 前記複数が、約2個〜6個の範囲である、実施態様6に記載のカテーテル。
(8) 前記複数が、3個である、実施態様6に記載のカテーテル。
(9) 前記複数が、6個である、実施態様5に記載のカテーテル。
(10) インピーダンスを感知するように構成された第1の複数の第1の微小要素と、温度を感知するように構成された第2の複数の第2の微小要素と、を更に備え、
前記第1の微小要素がそれぞれ、微小電極及びリードワイヤを収容する管を有し、
前記第2の微小要素がそれぞれ、温度を感知するように構成されたワイヤのペアを収容する管を有する、実施態様1に記載のカテーテル。
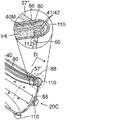
(12) 前記第2の微小要素の遠位端もまた、前記第1の微小要素との間に間隔をおいて、前記円周に沿った放射状のパターンで配置される、実施態様10に記載のカテーテル。
(13) 前記第2の微小要素の遠位端が、前記電極の前記長手方向軸を中心として、前記外殻の前記遠位部分の異なる円周に沿った放射状のパターンで配置される、実施態様10に記載のカテーテル。
(14) 前記露出した部分が、前記電極の前記長手方向軸に対して遠位方向の成分と径方向の成分とを有するある角度で延びる、実施態様3に記載のカテーテル。
(15) 前記露出した部分が、約0.2mm〜1.0mmの範囲の長さを有する、実施態様3に記載のカテーテル。
(16) 前記露出した部分が、組織を断裂することなく組織の微小陥凹部を形成するように適合された非外傷性の形態を有する、実施態様3に記載のカテーテル。
(17) 前記微小要素が、
管腔を有するガイド管と、
温度感知ワイヤの遠位部分に塗布された導電性コーティングを有する温度感知ワイヤのペアと、
前記コーティングに取り付けられたリードワイヤと、を含み、
前記温度感知ワイヤ及び前記リードワイヤが前記管腔を通じて延びる、実施態様1に記載のカテーテル。
(18) カテーテルであって、
細長い本体と、
遠位電極アセンブリであって、
内側チャンバを有するように構成されるとともに近位部分と遠位部分とを画定する壁を有する外殻を有する電極であって、前記遠位部分の前記壁が複数の孔を有する、電極と、
前記内側チャンバを通じて前記近位部分と前記遠位部分との間に延びる共通の複数の微小要素であって、それぞれの微小要素が、対応する孔に受容される遠位端を有し、前記遠位端が前記外殻の外側に露出した部分を有する、微小要素と、を有する、遠位電極アセンブリと、
制御ハンドルと、を備え、
それぞれの微小要素が、管腔を有する管、及び前記管腔を通じて延びる少なくとも1本のワイヤを含む、カテーテル。
(19) 前記複数の微小要素が、第1の微小要素の第1の群と、第2の微小要素の第2の群とを含み、
前記第1の微小要素がそれぞれ、管腔を有するガイド管、並びに前記管腔内に配置された微小電極及びリードワイヤを有し、
前記第2の微小要素がそれぞれ、管腔を有するガイド管、及び前記管腔を通じて延びる温度感知ワイヤのペアを有する、実施態様18に記載のカテーテル。
(20) 前記露出した部分が前記電極の長手方向軸に対してある角度で延び、前記角度が少なくとも遠位方向の成分を有する、実施態様18に記載のカテーテル。
Claims (14)
- カテーテルであって、
細長い本体と、
遠位電極アセンブリであって、
内側チャンバを有するように構成されるとともに近位部分と遠位部分とを画定する壁を有する外殻を有する電極であって、前記遠位部分の前記壁が少なくとも1個の孔を有する、電極と、
前記内側チャンバを通じて前記近位部分と前記遠位部分との間に延びる微小要素であって、前記微小要素が、前記少なくとも1個の孔に受容される遠位端を有し、前記遠位端が、前記壁の外表面と少なくとも同じ広がりで延在する、微小要素と、を有する、遠位電極アセンブリと、
制御ハンドルと、を備え、
前記微小要素が、管腔を有する管、及び、導電性の外殻キャップを備え、
複数のサーミスタワイヤおよびリードワイヤが、前記管の前記管腔を通って延び、前記複数のサーミスタワイヤおよび前記リードワイヤは、前記管腔を満たす非導電性かつ非断熱性材料によって互いから隔離され、前記リードワイヤは、前記外殻キャップに、はんだ付けされ、前記外殻キャップは、前記管の遠位端内に位置する開口部を有し、略U字状の断面を有している、カテーテル。 - 前記チャンバが流体を受容するように適合され、更に前記チャンバが、前記チャンバの内部から前記チャンバの外部へと流体を流すように構成された複数の灌注孔を有する、請求項1に記載のカテーテル。
- 前記微小要素の前記遠位端が、前記外殻の前記壁の外側に露出した部分を含む、請求項2に記載のカテーテル。
- それぞれが遠位端を有する複数の微小要素を更に備え、前記微小要素の前記遠位端が、前記電極の長手方向軸を中心として、前記電極の前記遠位部分に放射状のパターンで配置される、請求項1に記載のカテーテル。
- 前記複数が、約2個〜6個の範囲である、請求項4に記載のカテーテル。
- 前記複数が、3個である、請求項4に記載のカテーテル。
- 前記複数が、6個である、請求項4に記載のカテーテル。
- 前記露出した部分が、前記電極の前記長手方向軸に対して遠位方向の成分と径方向の成分とを有するある角度で延びる、請求項3に記載のカテーテル。
- 前記露出した部分が、約0.2mm〜1.0mmの範囲の長さを有する、請求項3に記載のカテーテル。
- 前記露出した部分が、組織を断裂することなく組織の微小陥凹部を形成するように適合された非外傷性の形態を有する、請求項3に記載のカテーテル。
- カテーテルであって、
細長い本体と、
遠位電極アセンブリであって、
内側チャンバを有するように構成されるとともに近位部分と遠位部分とを画定する壁を有する外殻を有する電極であって、前記遠位部分の前記壁が複数の孔を有する、電極と、
前記内側チャンバを通じて前記近位部分と前記遠位部分との間に延びる共通の複数の微小要素であって、それぞれの微小要素が、対応する孔に受容される遠位端を有し、前記遠位端が前記外殻の外側に露出した部分を有する、微小要素と、を有する、遠位電極アセンブリと、
制御ハンドルと、を備え、
それぞれの微小要素が、管腔を有する管、及び、導電性の外殻キャップを備え、
複数のサーミスタワイヤおよびリードワイヤが、前記管の前記管腔を通って延び、前記複数のサーミスタワイヤおよび前記リードワイヤは、前記管腔を満たす非導電性かつ非断熱性材料によって互いから隔離され、前記リードワイヤは、前記外殻キャップに、はんだ付けされ、前記外殻キャップは、前記管の遠位端内に位置する開口部を有し、略U字状の断面を有している、カテーテル。 - 前記チャンバが流体を受容するように適合され、更に前記チャンバが、前記チャンバの内部から前記チャンバの外部へと流体を流すように構成された複数の灌注孔を有する、請求項11に記載のカテーテル。
- 前記微小要素の前記遠位端が、前記外殻の前記壁の外側に露出した部分を含む、請求項12に記載のカテーテル。
- 前記露出した部分が前記電極の長手方向軸に対してある角度で延び、前記角度が少なくとも遠位方向の成分を有する、請求項13に記載のカテーテル。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13/224,291 US10201385B2 (en) | 2011-09-01 | 2011-09-01 | Catheter adapted for direct tissue contact |
| US13/224,291 | 2011-09-01 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013052241A JP2013052241A (ja) | 2013-03-21 |
| JP6071340B2 true JP6071340B2 (ja) | 2017-02-01 |
Family
ID=46758627
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012191328A Active JP6071340B2 (ja) | 2011-09-01 | 2012-08-31 | 組織との直接的な接触に適合されたカテーテル |
Country Status (9)
| Country | Link |
|---|---|
| US (2) | US10201385B2 (ja) |
| EP (2) | EP3569176A1 (ja) |
| JP (1) | JP6071340B2 (ja) |
| CN (1) | CN102961181B (ja) |
| AU (3) | AU2012216328A1 (ja) |
| CA (1) | CA2788138A1 (ja) |
| DK (1) | DK2564801T3 (ja) |
| ES (1) | ES2745505T3 (ja) |
| RU (1) | RU2609457C2 (ja) |
Families Citing this family (65)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2008092246A1 (en) | 2007-01-29 | 2008-08-07 | Simon Fraser University | Transvascular nerve stimulation apparatus and methods |
| EP2395934B1 (en) | 2009-02-11 | 2019-04-17 | Boston Scientific Scimed, Inc. | Insulated ablation catheter devices |
| US9277961B2 (en) | 2009-06-12 | 2016-03-08 | Advanced Cardiac Therapeutics, Inc. | Systems and methods of radiometrically determining a hot-spot temperature of tissue being treated |
| US8926605B2 (en) | 2012-02-07 | 2015-01-06 | Advanced Cardiac Therapeutics, Inc. | Systems and methods for radiometrically measuring temperature during tissue ablation |
| US9226791B2 (en) | 2012-03-12 | 2016-01-05 | Advanced Cardiac Therapeutics, Inc. | Systems for temperature-controlled ablation using radiometric feedback |
| US8954161B2 (en) | 2012-06-01 | 2015-02-10 | Advanced Cardiac Therapeutics, Inc. | Systems and methods for radiometrically measuring temperature and detecting tissue contact prior to and during tissue ablation |
| US10213856B2 (en) | 2015-10-19 | 2019-02-26 | Biosense Webster (Israel) Ltd. | Preparation of micro-electrodes |
| US8900228B2 (en) | 2011-09-01 | 2014-12-02 | Biosense Webster (Israel) Ltd. | Catheter adapted for direct tissue contact and pressure sensing |
| US10201385B2 (en) | 2011-09-01 | 2019-02-12 | Biosense Webster (Israel) Ltd. | Catheter adapted for direct tissue contact |
| WO2013040297A1 (en) | 2011-09-14 | 2013-03-21 | Boston Scientific Scimed, Inc. | Ablation device with ionically conductive balloon |
| US8876817B2 (en) | 2012-01-10 | 2014-11-04 | Boston Scientific Scimed Inc. | Electrophysiology system and methods |
| EP3228351B1 (en) | 2012-03-05 | 2019-06-05 | Lungpacer Medical Inc. | Transvascular nerve stimulation apparatus |
| CN104684614B (zh) | 2012-06-21 | 2017-10-17 | 西蒙·弗雷泽大学 | 经血管的膈膜起搏系统及使用方法 |
| BR112015010140A2 (pt) * | 2012-11-08 | 2017-07-11 | Koninklijke Philips Nv | dispositivo de intervenção e método para montar um dispositivo de intervenção |
| WO2014100631A1 (en) | 2012-12-20 | 2014-06-26 | Boston Scientific Scimed, Inc. | Real-time feedback for electrode contact during mapping |
| US9333033B2 (en) * | 2013-07-11 | 2016-05-10 | Biosense Webster (Israel) Ltd. | Detection of ablation electrode contact with tissue |
| CN105636513B (zh) | 2013-10-31 | 2020-05-12 | 波士顿科学医学有限公司 | 使用局部匹配进行高分辨率标测的医疗装置 |
| EP3062694A1 (en) | 2013-11-01 | 2016-09-07 | Boston Scientific Scimed, Inc. | Cardiac mapping using latency interpolation |
| AU2014351473B2 (en) * | 2013-11-22 | 2019-11-07 | Lungpacer Medical Inc. | Apparatus and methods for assisted breathing by transvascular nerve stimulation |
| EP3566743B1 (en) | 2014-01-21 | 2021-03-10 | Lungpacer Medical Inc. | Systems for optimization of multi-electrode nerve pacing |
| US9532725B2 (en) | 2014-03-07 | 2017-01-03 | Boston Scientific Scimed Inc. | Medical devices for mapping cardiac tissue |
| JP2017509399A (ja) | 2014-03-11 | 2017-04-06 | ボストン サイエンティフィック サイムド,インコーポレイテッドBoston Scientific Scimed,Inc. | 心臓組織をマッピングするための医療用デバイス |
| US20150342671A1 (en) * | 2014-05-29 | 2015-12-03 | Biosense Webster (Israel) Ltd. | Catheter electrode with multiple thermocouples |
| EP3206612B1 (en) | 2014-10-13 | 2022-06-29 | Boston Scientific Scimed Inc. | Tissue diagnosis and treatment using mini-electrodes |
| US10603105B2 (en) | 2014-10-24 | 2020-03-31 | Boston Scientific Scimed Inc | Medical devices with a flexible electrode assembly coupled to an ablation tip |
| US10758302B2 (en) | 2014-11-11 | 2020-09-01 | Biosense Webster (Israel) Ltd. | Irrigated ablation catheter with sensor array |
| AU2015349961A1 (en) * | 2014-11-19 | 2017-06-29 | Epix Therapeutics, Inc. | Ablation devices, systems and methods of using a high-resolution electrode assembly |
| JP6673598B2 (ja) | 2014-11-19 | 2020-03-25 | エピックス セラピューティクス,インコーポレイテッド | ペーシングを伴う組織の高分解能マッピング |
| CA2967829A1 (en) | 2014-11-19 | 2016-05-26 | Advanced Cardiac Therapeutics, Inc. | Systems and methods for high-resolution mapping of tissue |
| US9724154B2 (en) * | 2014-11-24 | 2017-08-08 | Biosense Webster (Israel) Ltd. | Irrigated ablation catheter with multiple sensors |
| EP3232969A1 (en) | 2014-12-18 | 2017-10-25 | Boston Scientific Scimed Inc. | Real-time morphology analysis for lesion assessment |
| US10034707B2 (en) * | 2014-12-30 | 2018-07-31 | Biosense Webster (Israel) Ltd. | Catheter with irrigated tip electrode with porous substrate and high density surface micro-electrodes |
| US20160242667A1 (en) | 2015-02-20 | 2016-08-25 | Boston Scientific Scimed Inc. | Tissue contact sensing using a medical device |
| US9636164B2 (en) | 2015-03-25 | 2017-05-02 | Advanced Cardiac Therapeutics, Inc. | Contact sensing systems and methods |
| CN104970881A (zh) * | 2015-07-02 | 2015-10-14 | 安隽医疗科技(南京)有限公司 | 一种射频消融导管以及包含该射频消融导管的治疗装置 |
| CN113598720A (zh) * | 2015-09-25 | 2021-11-05 | C·R·巴德股份有限公司 | 具有监测功能的导管组件 |
| US10813689B2 (en) * | 2015-11-25 | 2020-10-27 | Biosense Webster (Israel) Ltd. | Ablation catheter with radial force detection |
| WO2017136548A1 (en) | 2016-02-04 | 2017-08-10 | Cardiac Pacemakers, Inc. | Delivery system with force sensor for leadless cardiac device |
| CA3017269A1 (en) | 2016-03-15 | 2017-09-21 | Epix Therapeutics, Inc. | Improved devices, systems and methods for irrigated ablation |
| WO2017192480A2 (en) | 2016-05-02 | 2017-11-09 | Affera, Inc. | Therapeutic catheter with imaging |
| US11911093B2 (en) | 2016-09-12 | 2024-02-27 | Biosense Webster (Israel) Ltd. | Irrigation system for a catheter |
| US11559349B2 (en) * | 2016-09-12 | 2023-01-24 | Biosense Webster (Israel) Ltd. | Ablation catheter with a flexible printed circuit board |
| JP6826661B2 (ja) * | 2016-10-04 | 2021-02-03 | セント・ジュード・メディカル,カーディオロジー・ディヴィジョン,インコーポレイテッド | 可撓性電子回路を有するアブレーション・カテーテル・チップ |
| MX2019003483A (es) | 2016-10-04 | 2019-09-02 | Avent Inc | Sondas rf frias. |
| EP3614946B1 (en) | 2017-04-27 | 2024-03-20 | EPiX Therapeutics, Inc. | Determining nature of contact between catheter tip and tissue |
| US20180311467A1 (en) * | 2017-04-27 | 2018-11-01 | Ehsan Shameli | Mechanical Force Sensor Based on Eddy Current Sensing |
| WO2018217775A1 (en) * | 2017-05-23 | 2018-11-29 | Boston Scientific Scimed Inc. | Steam pop prevention using local impedance |
| EP3629964A2 (en) * | 2017-05-23 | 2020-04-08 | Boston Scientific Scimed Inc. | Lesion maturation prediction using local impedance |
| US10293164B2 (en) | 2017-05-26 | 2019-05-21 | Lungpacer Medical Inc. | Apparatus and methods for assisted breathing by transvascular nerve stimulation |
| EP4115942B1 (en) | 2017-06-30 | 2024-04-24 | Lungpacer Medical Inc. | System for prevention, moderation, and/or treatment of cognitive injury |
| US10195429B1 (en) | 2017-08-02 | 2019-02-05 | Lungpacer Medical Inc. | Systems and methods for intravascular catheter positioning and/or nerve stimulation |
| US10940308B2 (en) | 2017-08-04 | 2021-03-09 | Lungpacer Medical Inc. | Systems and methods for trans-esophageal sympathetic ganglion recruitment |
| CN110944592B (zh) * | 2017-08-17 | 2023-05-16 | 圣犹达医疗用品心脏病学部门有限公司 | 温度传感器和三维电极 |
| CN107564390A (zh) * | 2017-10-31 | 2018-01-09 | 成都大学 | 一种导尿护理考试用智能模型 |
| CN109745099A (zh) * | 2017-11-01 | 2019-05-14 | 锐泰安医疗科技(苏州)有限公司 | 超声外科手术系统及其控制方法 |
| CN108553164B (zh) * | 2018-03-22 | 2023-12-12 | 高传玉 | 一种血管段阻抗检测装置 |
| EP3877043A4 (en) | 2018-11-08 | 2022-08-24 | Lungpacer Medical Inc. | STIMULATION SYSTEM AND ASSOCIATED USER INTERFACES |
| US20200345413A1 (en) * | 2019-05-02 | 2020-11-05 | Biosense Webster (Israel) Ltd. | Monophasic-enabled catheter with microelectrodes and method of using same for local detection of signals |
| US11172984B2 (en) | 2019-05-03 | 2021-11-16 | Biosense Webster (Israel) Ltd. | Device, system and method to ablate cardiac tissue |
| WO2020232333A1 (en) | 2019-05-16 | 2020-11-19 | Lungpacer Medical Inc. | Systems and methods for sensing and stimulation |
| US20200376249A1 (en) * | 2019-05-29 | 2020-12-03 | Penumbra, Inc. | Flushing catheter |
| EP3983057A4 (en) | 2019-06-12 | 2023-07-12 | Lungpacer Medical Inc. | CIRCUIT FOR MEDICAL STIMULATION SYSTEMS |
| CN113040897B (zh) * | 2019-12-26 | 2022-07-26 | 上海微创电生理医疗科技股份有限公司 | 一种医用介入式导管 |
| IL282631A (en) | 2020-05-04 | 2021-12-01 | Biosense Webster Israel Ltd | Device, system and method for performing cardiac tissue ablation |
| USD1014762S1 (en) | 2021-06-16 | 2024-02-13 | Affera, Inc. | Catheter tip with electrode panel(s) |
Family Cites Families (45)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3530528B2 (ja) * | 1991-11-08 | 2004-05-24 | ボストン サイエンティフィック リミテッド | 絶縁された温度感知素子を有する切除電極 |
| US5853409A (en) | 1994-06-27 | 1998-12-29 | E.P. Technologies, Inc. | Systems and apparatus for sensing temperature in body tissue |
| EP0767628B1 (en) | 1994-06-27 | 2004-01-14 | Boston Scientific Limited | Non-linear control systems for heating and ablating body tissue |
| US5810802A (en) | 1994-08-08 | 1998-09-22 | E.P. Technologies, Inc. | Systems and methods for controlling tissue ablation using multiple temperature sensing elements |
| DE69616541T2 (de) * | 1995-05-01 | 2002-07-18 | Boston Scient Ltd | System zum erfühlen von unter-der-haut temperaturen in körpergewebe während ablation |
| US6030379A (en) | 1995-05-01 | 2000-02-29 | Ep Technologies, Inc. | Systems and methods for seeking sub-surface temperature conditions during tissue ablation |
| US5688267A (en) * | 1995-05-01 | 1997-11-18 | Ep Technologies, Inc. | Systems and methods for sensing multiple temperature conditions during tissue ablation |
| US6689127B1 (en) | 1995-08-15 | 2004-02-10 | Rita Medical Systems | Multiple antenna ablation apparatus and method with multiple sensor feedback |
| US6090105A (en) * | 1995-08-15 | 2000-07-18 | Rita Medical Systems, Inc. | Multiple electrode ablation apparatus and method |
| US5810804A (en) | 1995-08-15 | 1998-09-22 | Rita Medical Systems | Multiple antenna ablation apparatus and method with cooling element |
| US6063078A (en) | 1997-03-12 | 2000-05-16 | Medtronic, Inc. | Method and apparatus for tissue ablation |
| US6123699A (en) | 1997-09-05 | 2000-09-26 | Cordis Webster, Inc. | Omni-directional steerable catheter |
| US5964757A (en) | 1997-09-05 | 1999-10-12 | Cordis Webster, Inc. | Steerable direct myocardial revascularization catheter |
| US7094215B2 (en) | 1997-10-02 | 2006-08-22 | Arthrocare Corporation | Systems and methods for electrosurgical tissue contraction |
| US6176857B1 (en) | 1997-10-22 | 2001-01-23 | Oratec Interventions, Inc. | Method and apparatus for applying thermal energy to tissue asymmetrically |
| US6312425B1 (en) | 1998-05-05 | 2001-11-06 | Cardiac Pacemakers, Inc. | RF ablation catheter tip electrode with multiple thermal sensors |
| AU736964B2 (en) * | 1998-12-09 | 2001-08-09 | Cook Medical Technologies Llc | Hollow, curved, superelastic medical needle |
| US6358273B1 (en) * | 1999-04-09 | 2002-03-19 | Oratec Inventions, Inc. | Soft tissue heating apparatus with independent, cooperative heating sources |
| US6468260B1 (en) | 1999-05-07 | 2002-10-22 | Biosense Webster, Inc. | Single gear drive bidirectional control handle for steerable catheter |
| US6371955B1 (en) | 1999-08-10 | 2002-04-16 | Biosense Webster, Inc. | Atrial branding iron catheter and a method for treating atrial fibrillation |
| JP2004520865A (ja) * | 2000-07-25 | 2004-07-15 | リタ メディカル システムズ インコーポレイテッド | 局在化インピーダンス測定を使用する腫瘍の検出および処置のための装置 |
| US6638275B1 (en) | 2000-10-05 | 2003-10-28 | Medironic, Inc. | Bipolar ablation apparatus and method |
| US7047068B2 (en) | 2000-12-11 | 2006-05-16 | C.R. Bard, Inc. | Microelectrode catheter for mapping and ablation |
| US6522933B2 (en) | 2001-03-30 | 2003-02-18 | Biosense, Webster, Inc. | Steerable catheter with a control handle having a pulley mechanism |
| US6611699B2 (en) | 2001-06-28 | 2003-08-26 | Scimed Life Systems, Inc. | Catheter with an irrigated composite tip electrode |
| US20040092806A1 (en) * | 2001-12-11 | 2004-05-13 | Sagon Stephen W | Microelectrode catheter for mapping and ablation |
| CN100457059C (zh) | 2005-07-12 | 2009-02-04 | 付洁宇 | 多路射频消融治疗仪 |
| US7662152B2 (en) | 2006-06-13 | 2010-02-16 | Biosense Webster, Inc. | Catheter with multi port tip for optical lesion evaluation |
| US20090012592A1 (en) * | 2006-07-10 | 2009-01-08 | Ams Research Corporation | Tissue anchor |
| US8986298B2 (en) | 2006-11-17 | 2015-03-24 | Biosense Webster, Inc. | Catheter with omni-directional optical tip having isolated optical paths |
| JP5414531B2 (ja) * | 2006-12-06 | 2014-02-12 | スパイナル・モデュレーション・インコーポレイテッド | 送達装置、ならびに複数の脊髄レベルにある神経組織を刺激するためのシステムおよび方法 |
| WO2008118992A1 (en) | 2007-03-26 | 2008-10-02 | Boston Scientific Scimed, Inc. | High resolution electrophysiology catheter |
| US8123745B2 (en) * | 2007-06-29 | 2012-02-28 | Biosense Webster, Inc. | Ablation catheter with optically transparent, electrically conductive tip |
| US8535308B2 (en) | 2007-10-08 | 2013-09-17 | Biosense Webster (Israel), Ltd. | High-sensitivity pressure-sensing probe |
| US8357152B2 (en) | 2007-10-08 | 2013-01-22 | Biosense Webster (Israel), Ltd. | Catheter with pressure sensing |
| US8500730B2 (en) | 2007-11-16 | 2013-08-06 | Biosense Webster, Inc. | Catheter with omni-directional optical tip having isolated optical paths |
| US8118809B2 (en) | 2007-12-21 | 2012-02-21 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Flexible conductive polymer electrode and method for ablation |
| EP3391845B1 (en) | 2009-06-30 | 2020-02-12 | Boston Scientific Scimed, Inc. | Map and ablate open irrigated hybrid catheter |
| US10688278B2 (en) | 2009-11-30 | 2020-06-23 | Biosense Webster (Israel), Ltd. | Catheter with pressure measuring tip |
| US8374670B2 (en) | 2010-01-22 | 2013-02-12 | Biosense Webster, Inc. | Catheter having a force sensing distal tip |
| US9265574B2 (en) | 2010-03-10 | 2016-02-23 | Biosense Webster (Israel) Ltd. | Monitoring tissue temperature while using an irrigated catheter |
| EP2547276B1 (en) | 2010-03-15 | 2016-08-31 | Boston Scientific Scimed, Inc. | Ablation catheter with isolated temperature sensing tip |
| US8617087B2 (en) | 2010-12-03 | 2013-12-31 | Biosense Webster, Inc. | Control handle with rotational cam mechanism for contraction/deflection of medical device |
| US8792962B2 (en) | 2010-12-30 | 2014-07-29 | Biosense Webster, Inc. | Catheter with single axial sensors |
| US10201385B2 (en) | 2011-09-01 | 2019-02-12 | Biosense Webster (Israel) Ltd. | Catheter adapted for direct tissue contact |
-
2011
- 2011-09-01 US US13/224,291 patent/US10201385B2/en active Active
-
2012
- 2012-08-21 AU AU2012216328A patent/AU2012216328A1/en not_active Abandoned
- 2012-08-29 CA CA2788138A patent/CA2788138A1/en not_active Abandoned
- 2012-08-31 EP EP19182321.0A patent/EP3569176A1/en active Pending
- 2012-08-31 EP EP12182618.4A patent/EP2564801B1/en active Active
- 2012-08-31 ES ES12182618T patent/ES2745505T3/es active Active
- 2012-08-31 RU RU2012137203A patent/RU2609457C2/ru not_active IP Right Cessation
- 2012-08-31 JP JP2012191328A patent/JP6071340B2/ja active Active
- 2012-08-31 DK DK12182618.4T patent/DK2564801T3/da active
- 2012-08-31 CN CN201210320563.XA patent/CN102961181B/zh active Active
-
2016
- 2016-01-29 AU AU2016200547A patent/AU2016200547A1/en not_active Abandoned
-
2018
- 2018-12-12 AU AU2018278889A patent/AU2018278889A1/en not_active Abandoned
-
2019
- 2019-02-11 US US16/273,098 patent/US20190167347A1/en active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| US20130060245A1 (en) | 2013-03-07 |
| AU2016200547A1 (en) | 2016-02-18 |
| EP2564801B1 (en) | 2019-06-26 |
| EP2564801A1 (en) | 2013-03-06 |
| JP2013052241A (ja) | 2013-03-21 |
| RU2609457C2 (ru) | 2017-02-01 |
| CN102961181B (zh) | 2017-04-19 |
| EP3569176A1 (en) | 2019-11-20 |
| ES2745505T3 (es) | 2020-03-02 |
| US10201385B2 (en) | 2019-02-12 |
| RU2012137203A (ru) | 2014-03-10 |
| AU2018278889A1 (en) | 2019-01-03 |
| DK2564801T3 (da) | 2019-09-02 |
| CA2788138A1 (en) | 2013-03-01 |
| AU2012216328A1 (en) | 2013-03-21 |
| CN102961181A (zh) | 2013-03-13 |
| US20190167347A1 (en) | 2019-06-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6071340B2 (ja) | 組織との直接的な接触に適合されたカテーテル | |
| JP6262207B2 (ja) | 組織との直接的な接触及び圧力検知に適合されたカテーテル | |
| US11931100B2 (en) | Catheter with composite construction | |
| JP2017038919A (ja) | 積層型スパイン電極組立体を有するカテーテル | |
| JP2017012755A (ja) | 均一な長さのスパインを有する閉鎖型電極組立体を有するカテーテル | |
| US11819267B2 (en) | Irrigated catheter with improved ablation tip electrode fluid distribution |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150805 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160524 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160531 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160819 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20161206 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20161227 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6071340 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |