JP6065025B2 - 生体認証装置、生体認証システム、及び生体認証方法 - Google Patents
生体認証装置、生体認証システム、及び生体認証方法 Download PDFInfo
- Publication number
- JP6065025B2 JP6065025B2 JP2014557248A JP2014557248A JP6065025B2 JP 6065025 B2 JP6065025 B2 JP 6065025B2 JP 2014557248 A JP2014557248 A JP 2014557248A JP 2014557248 A JP2014557248 A JP 2014557248A JP 6065025 B2 JP6065025 B2 JP 6065025B2
- Authority
- JP
- Japan
- Prior art keywords
- feature data
- hand
- verification
- authentication feature
- authentication
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
- G06V40/12—Fingerprints or palmprints
- G06V40/13—Sensors therefor
- G06V40/1312—Sensors therefor direct reading, e.g. contactless acquisition
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
- G06V40/107—Static hand or arm
- G06V40/11—Hand-related biometrics; Hand pose recognition
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
- G06V40/12—Fingerprints or palmprints
- G06V40/1365—Matching; Classification
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
- G06V40/14—Vascular patterns
Description
本実施形態は、生体認証装置、生体認証システム、及び生体認証方法に関する。
生体認証は、指紋や静脈パターン等の生体情報で個人を識別する技術である。指紋は指や手のひらなどの表面に存在する模様で、個人毎に異なっているため、これを利用して個人の識別が可能である。手の平等に走る静脈は、近赤外線光を用いることで撮影できる。静脈のパターンは個人毎に異なっているため、これを利用して個人の識別が可能である。
生体認証の認証方式には、1:1認証と1:N認証が含まれる。1:1認証では、個人のIDを入力してその個人の登録済の生体情報と新たな生体情報とを照合して認証を行う。1:N認証では、個人のID等を入力せずに、登録済の生体情報の全データと新たな生体情報とを照合して認証を行う。1:N認証はIDを入力しなくて良いので、利便性が良い。一方、1:N認証では、登録済の生体情報の全データと照合するために、誤って別の人を個人と識別してしまう率(他人受け入れ率、以下、FARと呼ぶ)がNの増加と共に増大する。そこで、大規模な1:N認証における照合の精度は高い方が良い。
生体情報に基づいた個人の認証を行う場合、生体情報を取得するセンサに対する生体の位置を登録時と認証時とで一致させておけば、照合の精度を上げ、認証をより正確にする。例えば、登録時に取得しておいた生体の画像をガイド画像として、認証時に表示して生体の位置の誘導を行うという技術が知られている。また、被認証者が差し出す手が左右のどちらであっても、手の位置の誘導を、認証作業を滞らせずに行えるようにする技術が知られている(例えば、特許文献1および特許文献2参照)。
しかしながら、背景技術に記載されている技術では、生体情報として、例えば右手か左手のどちらか一方の生体情報を取得するセンサに対する、生体の位置を登録時と認証時とで一致させておく。また、登録時に取得しておいた、例えば右手か左手のどちらか一方の生体の画像をガイド画像として、認証時に表示して生体の位置の誘導を行う。
ここで、生体の位置を登録時と認証時とで一致させても、照合の精度を上げて認証をより正確にし、もって、FARを低減するのには限界がある。一千万人規模の正確な認証を実現し、更には、国の公共サービス等にも生体認証の導入可能とするには、更なるFARの低減が求められる。
FARを低減するため、左右両手の生体情報の照合を考えた場合、同じ一つのセンサで左右両手の照合を行うには、被認証者が移動しない限り、両手を差し出す角度が異なる。登録済の左右の手の生体情報のデータが被認証者の体に対して同様な角度で登録されている場合、同様の角度で差し出された手は認証がスムーズに行われる。しかし、異なった角度で差し出された他方の手では、登録済の取得データと認証時の取得データの角度も異なるので、認証がスムーズに行われない。
1つの側面では、本発明は、一つのセンサで左右両手の生体認証を行うことを目的とする。
生体認証装置の一態様によれば、一方の手に特有で照合に用いる第一の照合用認証特徴データと、他方の手に特有で照合に用いる第二の照合用認証特徴データと、を取得する単一の読み取りセンサと、一人分の前記第一の照合用認証特徴データと前記第二の照合用認証特徴データの夫々を、認証データとしてサーバに送信すると共に、照合結果を受信する通信部と、前記第一の照合用認証特徴データを取得する際の前記一方の手の前記読み取りセンサに対する角度と、前記第二の照合用認証特徴データを取得する際の前記他方の手の前記読み取りセンサに対する角度との差異である予測回転角を計算する回転予測部とを有し、前記通信部は、前記回転予測部で計算した前記予測回転角を前記サーバに送信することを特徴とする生体認証装置が提供される。
一つのセンサで左右両手の生体認証を行うことができる。
以下、図面に基づいて、実施例について詳細に説明する。なお、実施例を説明するための全図において、同一機能を有するものは同一符号を用い、繰り返しの説明は省略する。
<生体認証システムの概要>
図1には、実施例1における生体認証システムの構成例を示す。ここでは、生体情報として、左右の手の指紋と左右の手の平静脈を用いる例を示す。図1を参照して、実施例1における生体認証システムは、クライアント1と、読み取りセンサ2と、サーバ3と、クライアント1と読み取りセンサ2を接続する通信路4と、クライアント1とサーバ3を接続する通信路5とを含む。
図1には、実施例1における生体認証システムの構成例を示す。ここでは、生体情報として、左右の手の指紋と左右の手の平静脈を用いる例を示す。図1を参照して、実施例1における生体認証システムは、クライアント1と、読み取りセンサ2と、サーバ3と、クライアント1と読み取りセンサ2を接続する通信路4と、クライアント1とサーバ3を接続する通信路5とを含む。
クライアント1は、例えば、パーソナルコンピュータ(PC)等である。クライアント1には、クライアント制御部11と、左右手入力チェック部12と、左右対応テーブル13と、回転予測部14と、指紋照合部15と、静脈照合部16と、メモリ部17と、通信部18と、バス19とを含む。クライアント制御部11は、クライアント1の制御を行う。左右手入力チェック部12は、被認証者の左右の手のどちらから入力された生体情報であるかをチェックする。左右対応テーブル13は、被認証者の左右の手の形状について、左右の対応関係を保存する。回転予測部14は、被認証者の左右の手のうちの一方の生体情報の入力角度に対する他方の生体情報の入力角度を予想する。指紋照合部15では、被認証者の指紋の特徴を照合する。指紋照合部15は、後述する左右手入力チェックの際にも利用される。静脈照合部16では、被認証者の静脈の特徴を照合する。静脈照合部16は、後述する左右手入力チェックの際にも利用される。メモリ部17は、取得した生体情報に関する画像の保持や後述する照合処理の作業領域として利用する。通信部18は、通信路5及び/又はサーバ3との通信処理を行う。バス19は、クライアント制御部11、左右手入力チェック部12、左右対応テーブル13、回転予測部14、指紋照合部15、静脈照合部16、メモリ部17、及び通信部18を相互に接続する。
読み取りセンサ2は、指紋センサ部21と、静脈センサ部22とを含む。指紋センサ部21は、被認証者の指紋を画像として読み取るセンサである。静脈センサ部22は被認証者の静脈の画像を読み取るセンサである。
サーバ3は、例えば、サーバ(SV)、コンピュータ、パーソナルコンピュータ(PC)等である。サーバ3には、ストレージ部30と、サーバ制御部31と、指紋照合部35と、静脈照合部35と、メモリ部37と、通信部38と、バス39とを含む。
ストレージ部30は、生体情報の登録テンプレートの保存等を行う。サーバ制御部31は、サーバ3全体の制御を行う。指紋照合部35では、被認証者の指紋の特徴を照合する。
静脈照合部16では、被認証者の静脈の特徴を照合する。メモリ部37は、取得した生体情報に関する画像の保持や後述する照合処理の作業領域として利用する。通信部38は、通信路5及び/又はクライアント1との通信処理を行う。バス39は、ストレージ部30、サーバ制御部31、指紋照合部35、静脈照合部35、メモリ部37、及び通信部38を相互に接続する。
ストレージ部30は、生体情報の登録テンプレートの保存等を行う。サーバ制御部31は、サーバ3全体の制御を行う。指紋照合部35では、被認証者の指紋の特徴を照合する。
静脈照合部16では、被認証者の静脈の特徴を照合する。メモリ部37は、取得した生体情報に関する画像の保持や後述する照合処理の作業領域として利用する。通信部38は、通信路5及び/又はクライアント1との通信処理を行う。バス39は、ストレージ部30、サーバ制御部31、指紋照合部35、静脈照合部35、メモリ部37、及び通信部38を相互に接続する。
通信路4は、有線または無線であり、クライアント1と読み取りセンサ2との間の通信を可能にするものであればよい。USBケーブル、ファイヤーワイヤー(FireWire)(登録商標)、インターネット、ローカルエリアネットワーク、ワイファイ(Wi−Fi)(登録商標)、ブルートゥース(Bluetooth)(登録商標)等各種の方式が利用可能である。
通信路5は、有線または無線であり、クライアント1とサーバ3との間の通信を可能にするものであればよい。USBケーブル、ファイヤーワイヤー(FireWire)(登録商標)、インターネット、ローカルエリアネットワーク、ワイファイ(Wi−Fi)(登録商標)、ブルートゥース(Bluetooth)(登録商標)等各種の方式が利用可能である。
図2と図3を参照して、読み取りセンサ2の一例について説明する。図2は、読み取りセンサ2の一例を側面から示す図である。図3は、読み取りセンサ2の前記一例を上面から示す図である。読み取りセンサ2には、図1で示した指紋センサ部21と静脈センサ部22に加えて、更に、ガイド23と、ケース24と、指紋読み取り範囲25と、静脈読み取り範囲26とを含む。ガイド23は、生体情報を取得する際に、手が指紋センサ部21や静脈センサ22上の適正位置に置かれるように導く。例えば、ガイド23として、手が左右にずれないように手の両側に壁を設ける。ケース24は、指紋センサ部21、静脈センサ部22、及びガイド23を収納する。指紋読み取り範囲25は、指紋センサ25の上に位置し、この範囲に指の腹が置かれると指紋が読み込まれるようになっている。静脈読み取り範囲26は、静脈センサ部22の上方に位置し、この範囲に手の平が置かれると手の平静脈の画像が読み込まれるようになっている。
読み取りセンサ2は、例えば、三指の指紋(人差し指、中指、薬指)と手の平静脈を画像化の対象とする。指紋と手の平静脈のように、複数の生体情報の種類を用いる方式(マルチモーダル方式)では、照合の精度を上げて認証をより正確に行うことができる。
<生体情報の登録処理>
大規模な1:N認証であっても、FARを増加させることなく照合の精度を上げて認証をより正確にするため、左右両方の手の生体情報を用いた認証について説明する。生体情報中、比較の対象となる特徴量は、左右両方の手の指紋、左右両方の手の平静脈、又は、左右両方の手の指紋及び左右両方の手の平静脈、等を利用することができる。
<生体情報の登録処理>
大規模な1:N認証であっても、FARを増加させることなく照合の精度を上げて認証をより正確にするため、左右両方の手の生体情報を用いた認証について説明する。生体情報中、比較の対象となる特徴量は、左右両方の手の指紋、左右両方の手の平静脈、又は、左右両方の手の指紋及び左右両方の手の平静脈、等を利用することができる。
図4は、実施例1における生体情報の登録処理のフローチャートである。図4に示すフローチャートでは、1回目のデータ取得では被認証者の一方の手の生体情報を入力することを意図している。また、2回目のデータ取得では被認証者の他方の手の生体情報を入力することを意図している。しかしながら、この意図に反して、例えば、1回目のデータ取得と2回目のデータ取得とで同じ側の手の生体情報が入力されることがある。そのような場合には、生体情報の登録が正しく行われない。
そこで、図4を参照して、以下のように処理を行う。なお、以下、V1、V2、F1、F2、及びF1'はそれぞれ以下の意味を持つ。V1は、1回目のデータ取得において登録用に取得した認証特徴データ(三指の指紋および手の平静脈の特徴データ)を示す。V2は、2回目のデータ取得において登録用に取得した認証特徴データ(三指の指紋および手の平静脈の特徴データ)を示す。F1は、1回目のデータ取得において取得した手の外形形状の形状特徴データを示す。F2は、2回目のデータ取得において取得した手の外形形状の形状特徴データを示す。F1'は、1回目のデータ取得において取得した手の外形形状の形状特徴データを左右反転させてから抽出した形状特徴データを示す。ここで特徴データとは、画像から認証や形状の比較に必要となる情報のみを抽出したものである。認証特徴の例としては、手のひら静脈のパターンや指紋の特徴点(マニューシャ)などが該当する。形状特徴の例としては、指の長さや手の幅、輪郭形状などが該当する。
例えば、ステップS101及びステップS102は、読み取りセンサ2により実行される。ステップS103からS107及びステップS109は、クライアント1により実行される。ステップS108は、サーバ3により実行される。
ステップS101では、読み取りセンサ2により、1回目のデータ取得を行う。ここで取得する認証特徴データは、V1である。また、ここで取得する形状特徴データは、F1である。
ステップS102では、読み取りセンサ2により、2回目のデータ取得を行う。ここで取得する認証特徴データは、V2である。また、ここで取得する形状特徴データは、F2である。図5は、実施例1における生体情報の登録処理の様子を示す図である。図5を参照して、例えば、1回目は、右手のデータ取得をし、2回目は、左手のデータ取得をする。この際、1回目の右手のデータ取得も2回目の左手のデータ取得においても、読み取りセンサ2の長手方向に対して、手の平の長手方向がほぼ平行となるように手を配置して、データ取得をする。
なお、読み取りセンサ2以外の読み取りセンサ等によって、ステップS101及びステップS102の1回目と2回目のデータ取得を行ってもよい。
ステップS103では、指紋照合部15と静脈照合部16により、認証特徴データV1と認証特徴データV2とが同一か判定する。認証特徴データV1と認証特徴データV2とが同一と判定された場合(YES)、ステップS104に移行する。認証特徴データV1と認証特徴データV2とが同一と判定されない場合(NO)、ステップS105に移行する。
ステップS104では、クライアント制御部11が、同じ人の同じ側の手が1回目のデータ取得と2回目のデータ取得の2回分データ取得されたと判定する。そこで、クライアント制御部11は、エラーであると判定して処理を中止する。
ステップS105では、クライアント制御部11又は左右手入力チェック部12により、形状特徴データF1'を計算して取得する。形状特徴データF1'は、ステップS101の1回目のデータ取得で取得した手の形状特徴データF1を左右反転する計算により取得される。
ステップS106では、クライアント制御部11又は左右手入力チェック部12により、形状特徴データF1'が形状特徴データF2と所定範囲で一致するか比較する。形状特徴データF1'が形状特徴データF2と所定範囲で一致しない場合(NO)、ステップS107に移行する。形状特徴データF1'が形状特徴データF2と所定範囲で一致する場合(YES)、ステップS108に移行する。ステップS106のYESでは、指の長さや輪郭形状等の手の形状を左右反転させて比較すると、同一人の場合には一致するものとして、形状特徴データF1'の形状特徴データF2と一致をもって、同一人の両側の手がデータ取得されたとする。ここで、同一人の両側の手の認証特徴データV1と認証特徴データV2と、認証特徴データV1と認証特徴データV2の取得の対象となった人を特定するIDと、認証特徴データV1と認証特徴データV2がそれぞれ左右の手どちらのものであるか示す情報と共に、通信部18により、クライアント1からサーバ3へと送信される。なお、登録の際には、1回目のデータ取得が右手のデータ取得で、2回目のデータ取得が左手のデータ取得と決めて登録してもよい。
ステップS107では、クライアント制御部11は、1回目のデータ取得と2回目のデータ取得とでは、異なる人の手がデータ取得の対象となったと判定する。そこで、クライアント制御部11は、エラーと判定し、処理を中止する。
ステップS108では、サーバ3において、認証特徴データV1と認証特徴データV2をIDに関連付けて登録する。サーバ制御部31は、認証特徴データV1と認証特徴データV2をIDに関連付けて、ストレージ部30に登録する。
ステップS109では、サーバ3はクライアント1に対して登録の完了を通知する。こうして、登録処理は完了する。
ここで、ステップS105の手の形状特徴データF1を左右反転する計算と、ステップS106の形状特徴データF1'が形状特徴データF2と一致するかの判定について説明する。
まず、形状特徴データF1について説明する。本実施例では、指紋センサ部21で取得した画像と静脈センサ部22から取得した画像とから形状特徴データF1を取得する。具体的には指の長さ、手の平の幅、及び手首の幅等を形状特徴データとして利用することができる。
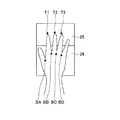
図3を参照して、人差し指、中指及び薬指の3本の指の長さを形状特徴データF1として利用する例について説明する。
図3中、T1は、左から1番目の指(人差し指)の指紋中心座標を示す。T2は、左から2番目の指(中指)の指紋中心座標を示す。T3は、左から3番目の指(薬指)の指紋中心座標を示す。BAは左から1番目の指(人差し指)の左側の付け根の座標を示す。BBは、左から1番目の指(人差し指)の右側の付け根の座標であり、かつ、左から2番目の指(中指)の左側の付け根の座標を示す。BCは、左から2番目の指(中指)の右側の付け根の座標であり、かつ、左から3番目の指(薬指)の左側の付け根の座標を示す。BDは、左から3番目の指(薬指)の右側の付け根の座標を示す。
指紋から指紋中心座標T1、T2、及びT3を取得し、静脈画像から指の付け根座標BA、BB、BC、及びBDを取得し、これらの座標差から指の長さを計算する。ここで、指の長さには指の左右両側の長さが含まれる。左から1番目の指(人差し指)の左側の長さL1Lは、T1−BAで得られる。左から1番目の指(人差し指)の右側の長さL1Rは、T1−BBで得られる。左から1番目の指(人差し指)の右側の長さL1Rは、T1−BBで得られる。左から2番目の指(中指)の左側の長さL2Lは、T2−BBで得られる。左から2番目の指(中指)の右側の長さL2Rは、T2−BCで得られる。左から3番目の指(薬指)の左側の長さL3Lは、T3−BCで得られる。左から3番目の指(薬指)の右側の長さL3Rは、T3−BDで得られる。
図6は、実施例1における形状特徴データの一例を示す左右対応テーブルである。形状特徴データF1は、例えば、上述の指の長さL1L、L1R、L2L、L2R、L3L、及びL3R、手の平の幅、及び手首の幅である。指の長さL1L、L1R、L2L、L2R、L3L、及びL3R、手の平の幅、及び手首の幅にそれぞれ対応して、形状特徴データの識別番号が1から8まで付してある。
ステップS105の手の形状特徴データF1を左右反転する計算は、図3に示した手が手の平の面に対して面対称となった画像を想定することで行われる。左右反転して取得した手の形状特徴データF1'は次のような特徴を有する。左右反転しても、識別番号7と8の手の平の幅と手首の幅には変化がない。そこで、反転識別番号は、手の平の幅について識別番号と同じ7を、手首の幅について識別番号と同じ8を付する。一方、3本の指の長さは、左から1番目の指が薬指に、左から2番目の指は中指に、左から3番目の指が人指し指になるので、手の形状特徴データF1とは異なってくる。そこで、図6に示す通り、指の長さL1L、L1R、L2L、L2R、L3L、及びL3Rには、それぞれ反転識別番号6から1を付す。こうして、特徴データF1'は、反転識別番号にそれぞれ対応する指の長さのデータとして得られる。
ステップS106では、左右手入力チェック部12が、2回目のデータ取得で得られた手の形状特徴データF2と上述するように得られた形状特徴データF1'との一致を判定する。形状特徴データF2をその識別番号と同じ反転識別番号に対応する形状特徴データF1と比較し、所定の範囲で一致すれば形状特徴データF1'が形状特徴データF2と一致すると判定する(YES)。
なお、左右対応テーブルを用いて、形状特徴データF1'が形状特徴データF2と一致するか判定(ステップS106)する例を示したが、1回目の入力画像を左右反転してから特徴量を抽出してもよい。
実施例1では、形状特徴データF1'が形状特徴データF2と一致するか(ステップS106)否かをクライアント1で判定した。クライアント1で判定することにより、ネットワーク等の通信路5及びサーバ3の負荷を低減することができる。これに限らず、形状特徴データF1'が形状特徴データF2と一致するか(ステップS106)否かをサーバ3で判定してもよい。
図7は、実施例1における生体情報の照合処理のフローチャートである。
<生体情報の認証処理>
例えば、ステップS201及びステップS203は、読み取りセンサ2により実行される。ステップS203からS207、ステップS209、及びステップS211からS213は、クライアント1により実行される。ステップS202及びステップS211は、サーバ3により実行される。
<生体情報の認証処理>
例えば、ステップS201及びステップS203は、読み取りセンサ2により実行される。ステップS203からS207、ステップS209、及びステップS211からS213は、クライアント1により実行される。ステップS202及びステップS211は、サーバ3により実行される。
ステップS201では、読み取りセンサ2により、1回目のデータ取得を行う。ここで取得する認証特徴データは、V10である。また、ここで取得する形状特徴データは、F10である。取得された認証特徴データV10は、サーバ3に送信される。
ステップS202では、サーバ3により、取得した認証特徴データV10の識別を行う。サーバ3の指紋照合部35と静脈照合部36は、ストレージに記憶された登録用の認証特徴データV1の中から認証特徴データV10と所定の範囲で一致するものを抽出する照合処理が行われる。認証特徴データV10と一致した登録用の認証特徴データV1から、対応するIDと左右のどちらの手の登録用の認証特徴データV1かを示す左右情報を特定する。そして、認証特徴データV10に対応する被認証者のID、及び手の左右情報が、サーバ3からクライアント1へ送信される。
ステップS203では、読み取りセンサ2により、2回目のデータ取得を行う。ここで取得する認証特徴データは、V20である。また、ここで取得する形状特徴データは、F20である。図8は、実施例1における生体情報の照合処理の様子を示す図である。図8を参照して、例えば、1回目は、右手のデータ取得をし、2回目は、左手のデータ取得をする。この際、1回目の右手のデータ取得、読み取りセンサ2の長手方向に対して、手の平の長手方向が平行となるように手を配置して、データ取得をする。しかし、2回目の左手のデータ取得では、手の平の長手方向が読み取りセンサ2の長手方向に対して、斜めに角度を持つように配置される可能性が高い。
つまり、図5に示す生体情報の登録処理では、FAR減少のために、例えば、高精細な認証特徴データV1とV2とを取得するため、オベレーターが介在して、左右両手共に手の平の長手方向が平行となるように手を丁寧に配置して、データ取得をする。これに対して、図8に示す生体情報の照合処理では、丁寧にゆっくりと照合する可能性が低いため、1回目のデータ取得のために決めた立ち位置のまま、2回目のデータ取得のため手を差し出す可能性が高い。この結果、2回目の左手のデータ取得では、手の平の長手方向が読み取りセンサ2の長手方向に対して斜めに角度θを持つように配置される可能性が高い。
ステップS204では、指紋照合部15と静脈照合部16により、認証特徴データV10と認証特徴データV20とが同一か判定する。認証特徴データV10と認証特徴データV20とが同一と判定された場合(YES)、ステップS205に移行する。認証特徴データV1と認証特徴データV2とが同一と判定されない場合(NO)、ステップS206に移行する。
ステップS205では、同じ被認証者の同じ側の手が、1回目のデータ取得と2回目のデータ取得の2回分データ取得されたとクライアント制御部11が判定する。そこで、クライアント制御部11は、エラーと判定し、処理を中止する。この際、「もう一方の手をかざして下さい。」というようなメッセージを、読み取りセンサ2から出してもよい。右手と左手を交互にかざす入力動作は、一般に被認証者にとって馴染みが少ないため、被認証者が間違える可能性がある。被認証者が間違えて右手を2回かざしてしまうような場合に、被認証者に適切な案内をするためである。これにより、使い勝手の良い生体認証システムを提供できる。
なお、1回目のデータ取得の対象である形状特徴データF1と2回目のデータ取得の対象である形状特徴データF2を更に比較する構成としても良い。具体的には、形状特徴データF1を左右反転せずに、形状特徴データF2と比較する。同じ手が2回連続して入力された場合、形状特徴データも一致する。しかし、認証特徴データが一致しているにも関わらず、形状特徴データが一致しない場合、なんらかの不正が行われたと判定できる。この場合には、警告を行うようにしてもよい。
ステップS206では、クライアント制御部11又は左右手入力チェック部12により、形状特徴データF10'を計算して取得する。形状特徴データF10'は、ステップS201の1回目のデータ取得で取得した手の形状特徴データF10を左右反転する計算により取得する。左右反転する計算は、図4を参照して説明した登録処理における左右反転する計算と同様であるので、説明を省略する。
ステップS207では、クライアント制御部11又は左右手入力チェック部12により、形状特徴データF10'が形状特徴データF20と所定の範囲で一致するか比較する。形状特徴データF10'が形状特徴データF20と一致すると判定されない場合(NO)、ステップS208に移行する。形状特徴データF10'が形状特徴データF20と一致すると判定された場合(YES)、ステップS209に移行する。
ステップS208では、1回目のデータ取得と2回目のデータ取得とでは、異なる人の手がデータ取得の対象となったとして、クライアント制御部11により、エラーと判定し、処理を中止する。この際、「ご本人の手にかえて下さい。」というメッセージを、読み取りセンサ2から出してもよい。意図的に本来の入力操作とは異なる入力を行う場合が想定される。例えば、他人になりすます目的や単純ないたずらで、このような入力が行われうる。この場合、システムに意図しない負荷がかかってしまう。また、例えば、不適切な取得データを同時にサーバに多数送り、サーバをダウンさせる攻撃等に対する備えがいる。前記メッセージを出すことで、これらのなりすまし、いたずら、及び攻撃を早い段階で排除し、被認証者の利便性向上と、システム負荷の低減をはかることができる。
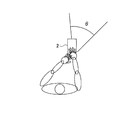
ステップS209では、回転予測部14で予測回転角θを計算する。回転予測部14は、1回目にデータ取得の対象となった手(例えば右手)の長手方向に対して、2回目にデータ取得の対象となった手(例えば左手)の長手方向がどの程度回転するかを予測する。図9は、実施例1における手の回転を説明する図である。予測回転角θは、1回目にデータ取得の対象となった手(例えば、右手)に対する2回目にデータ取得の対象となった手(例えば、左手)の予測される回転角である。1回目にデータ取得の対象となった手に対する2回目にデータ取得の対象となった手の回転角が、図9上で右回り方向の場合、+の符号を付し、左方向の場合、−の符号を付することとする。ここで、回転角とは、図9に示すように、ほぼ手の平の中心を回転軸にした場合の手の平面上の回転角度をいう。
予測回転角θを、手の大きさSHを入力とする関数で決定することにより、予測精度を高めることが可能となる。ここでSHは、手の大きさを表す値で、例えば、手の平の面積である。

予測回転角θを被認証者の手の大きさを表す値SHから求める理由は、被認証者の手の大きいほど体も大きく、体が大きい程予測回転角θが大きくなる傾向のあることが、実験的にわかっているからである。図10は、実施例1における体の大きさが異なる人とその人の手の回転の関係を説明する図である。
体が大きい程予測回転角θが大きくなる傾向のある理由を説明する。図10(a)に示すように、体が小さい人の場合、読み取りセンサ2は被認証者の肩とほぼ同じ高さに位置することになる。図10(c)に示すように、体が大きい人の場合、読み取りセンサ2は被認証者の肩の下方に位置することになる。
ここで、仮に体の小さい人も体も大きい人も、ともに肩の高さに読み取りセンサが存在すると仮定する。つまり体が大きい人の場合も図10の(a)と同一の状態にあると仮定する。これは、図10(a)の全体を均等に拡大することに該当する。この場合は、左手をかざした時の角度θ(図10(b)のθ1に相当)は、体が小さい場合でも体が大きい場合で同じになる。これは、体の各部位の大きさ(長さ)は全体に比例すると考えられる為である。
しかし、実際の運用では読み取りセンサの存在する高さは一定である場合が殆んどである。その為、体が大きい人の場合、肩と読み取りセンサが存在する位置までの高さの差を埋める為、体が小さい人に比べ、より読取りセンサに近い位置に立つ必要がある。その結果、体が大きい人の方が角度θは大きくなる。この理由を以下で説明する。
図10(a)の体が小さい人の例で、腕の長さをR1とすると、腕を水平に伸ばせる為、D1≒R1である。一方、図10(c)の体が大きい人の例で、腕の長さをR2とすると、D2<R2という関係がある(腕を下に伸ばした為、近づく必要がある為)。ここで、左手をかざした時の角度θは、それぞれ以下のように求まる。
θ1=arctan(S1/D1)≒atan(S1/R1)
θ2=arctan(S2/D2)≒atan(S2/R2)
ここで、腕の長さ(R1,R2)と体の幅(S1,S2)の比はほぼ一定であると考えられる為、S1/R1≒S2/R2という関係がある。従って、最終的にθ1<θ2という関係が得られる。
また、本装置を立って利用する場合と座って利用する場合とで、式(1)の係数aとbとを異なるものにする構成としても良い。つまり、被認証者が座っている場合に比べて、立っている場合の方が、体の大きさ(身長)による予測回転角θの増大が起きやすい。そのため、立つ場合と座る場合によって係数aとbとを適切な値に設定することによって、より高精度な生体認証をすることができる。
θ2=arctan(S2/D2)≒atan(S2/R2)
ここで、腕の長さ(R1,R2)と体の幅(S1,S2)の比はほぼ一定であると考えられる為、S1/R1≒S2/R2という関係がある。従って、最終的にθ1<θ2という関係が得られる。
また、本装置を立って利用する場合と座って利用する場合とで、式(1)の係数aとbとを異なるものにする構成としても良い。つまり、被認証者が座っている場合に比べて、立っている場合の方が、体の大きさ(身長)による予測回転角θの増大が起きやすい。そのため、立つ場合と座る場合によって係数aとbとを適切な値に設定することによって、より高精度な生体認証をすることができる。
また、予測回転角θには、固定値を設定してもよい。例えば、被認証者が立っている場合に比べ座っている場合の方が、体の大きさ(身長)による予測回転角θの増大が起きにくい。そこで、座っている場合には、予測回転角θとして固定値を設定してもよい。
予測回転角θの符号、つまり、2回目のデータ取得時の手の回転方向は、左右の手のうちどちらを先に置いたかによって変わってくる。先に右手を置いて次に左手を置いた場合と、先に左手を置いて次に右手を置いた場合では、予測回転角θの向きが逆となる。
そのため、1回目のデータ取得の対象が右手なのか左手なのかを判定する。ここで、形状特徴データF10を用いて、手の左右を判定することもできる。しかし、形状特徴データによる左右の判定の精度は高いといえない。そのために、実施例1では、1回目のデータ取得の対称となった認証特徴データV10を基に左右どちらの手であるかを判定する。上述のように、登録時にはオペレータが介在しているので、オペレータ等によって認証特徴データV1とこれに対応する左右情報とを合わせてサーバ3に保存しておく。あるいは、登録の際には、右手から左手の順番でデータ取得して登録すると決めてもおいてもよい。認証特徴データは、右手と左手で異なっている。そこで、1回目のデータ取得の対象である認識特徴データV10と登録された認識特徴データV1とを比較し、一致した認識特徴データが右手のものか、左手のものかを見ることで、1回目のデータ取得の対象である手が左右どちらの手だったかを判定する。1回目のデータ取得の対象である手が右の場合、2回目は左手のデータ取得を行うので、予測回転角θは+になる。1回目のデータ取得の対象である手が左の場合、2回目は右手のデータ取得を行うので、予測回転角θは−になる。
ステップS210では、サーバ3により、取得した認証特徴データV20の識別を行う。サーバ3の指紋照合部35と静脈照合部36は、2回目の照合処理に先立って、照合用の認証特徴データV20を予測回転角θ分回転させる(オフセット設定)。
登録した認証特徴データと照合する認証特徴データの間の回転角が大きくなると照合が失敗し易くなる。照合処理時の回転角の探索範囲を広げることもできるが、認証処理の負荷の増加を伴う。また、回転角の探索範囲を広げて照合を行うと、他人同士のデータが一致する確率が増大する為、他人受入れ率(FAR)が増加する。つまり、別人同士の認証特徴データであっても、様々な回転角度を与えて照合すると確率的に類似度が向上してしまう場合がある。
そこで、例えば、1回目のデータ取得の対象である認証特徴データV10を基に、2回目のデータ取得の対象である認証特徴データV20が+20°回転すると予測できる場合、認証特徴データV20を−20°回転することで補正し、その近傍範囲(例えば±5°)のみを探索しながら、登録用の認証特徴データV2と照合する。また、形状特徴データに対しても同様の処理を適用しても良い。
このようにオフセット設定することで、計算時間を低減することが可能となり、被認証者へのレスポンスが改善し、生体認証システムの利便性が向上する。同等の処理時間をより少ない演算能力を持つサーバで構築することが可能となる為、コストパフォーマンスが改善する。回転角の探索範囲を狭くし、FARを減少させることが可能となる。
サーバ3の指紋照合部35と静脈照合部36は、ストレージに記憶された登録用の認証特徴データV2の中から、予測回転角θ分回転させた認証特徴データV20と所定の範囲で一致するものを抽出する照合処理を行う。これにより、一致の抽出までの時間が短縮され、高速で高精度な照合ができる。認証特徴データV20と一致した登録用の認証特徴データV2から、対応する被認証者のIDと左右のどちらの手かを示す左右情報とを特定する。そして、認証特徴データV20に対応するID、及び手の左右情報が、サーバ3からクライアント1へ送信される。
ステップS211では、クライアント制御部11において、認証を行う。ステップS202でクライアント3へと送られた認証特徴データV10に対応する被認証者のID及び手の左右情報、及び、ステップS210でクライアント3へと送られた認証特徴データV20に対応する被認証者のID及び手の左右情報を判断する。被認証者のID同士が一致し、手の左右情報が異なる側の手を示している場合には、1回目のデータ取得の対象者と2回目のデータ取得の対象者が同一の被認証者であると判定する(YES)。
判定が成功した場合(YES)には、認証成功(ステップS212)として照合処理を終了する。一方、判定が失敗した場合(NO)には、認証成功(ステップS213)として照合処理を終了する。
判定が成功した場合(YES)には、認証成功(ステップS212)として照合処理を終了する。一方、判定が失敗した場合(NO)には、認証成功(ステップS213)として照合処理を終了する。
なお、左右手認証の際の入力の順番は、右手の次に左手でも良いし、左手の次に右手でも良い。
なお、実施例1では生体情報として、指紋と手の平静脈の組み合せを説明しているが、他の特徴、例えば、指静脈や掌紋等を組み替えたり、あるいは組み合わせる構成とすることもできる。
また、ステップS207をクライアント1で処理するのは、サーバ3とネットワーク等の通信路5の処理負担を軽減するためであり、ステップS207をサーバ3で処理してもよい。
また、ステップS101及びステップS102の登録処理と、ステップS201及びステップS203の登録処理とは、異なる読み取りセンサにより実行されてよい。また、ステップS103からS107及びステップS109の照合処理と、ステップS203からS207、ステップS209、及びステップS211からS213の照合処理とは、異なるクライアントにより実行されてよい。
実施例1によれば、一つのセンサで左右両手の生体認証を行うことで、一人分の照合する特徴データを増やせるので、他人受け入れ率を低減することができる。
実施例2では、読み取りセンサ2として、静脈センサ部22のみを用いる。図11は、実施例2における生体認証システムの構成例を示す図である。図11を参照して、実施例2における生体認証システムの構成例を説明する。
実施例2を説明するための図13において、図1と同一機能を有するものは同一符号を用い、繰り返しの説明は省略する。実施例2は、実施例1と比較して、指紋センサ部21、指紋照合部15、左右対応テーブル13、及び、指紋照合部35がなく、画像左右反転部131がある点が異なる。
画像左右反転部131は、図4のステップS105と図7のステップS206とで、データ取得の対象となった形状特徴データの左右を反転する。ここで使用する形状特徴データは、例えば、手の平の輪郭の形状から得られる。具体的には、手の平の輪郭の画像をトレースし、輪郭線のフーリエ記述子を形状特徴データとしてもよい。また、手の平全体の形状の画像からモーメントを計算し、それを形状特徴データとして利用してもよい。手の形状の画像の特徴量については、文献R.M.Luque, D.Elizondo, E.Lopez−Rubio and E.J.Palomo, "GA−Based Feature Selection Approach In Biometric Hand Systems", Proceedings of International Joint Conference on Neural Networks, San Jose、California, USA, July 31−August 5, 2011, 2011 IEEE, 246ページから253ページなどを参照できる。これらの特徴量を、形状特徴データとして利用してもよい。
画像左右反転部131は、上述の画像から得られる形状特徴データの左右反転を、1回目のデータ取得の対象に対して適用してもよいし、2回目のデータ取得の対象に対して適用してもよい。1回目のデータ取得の対象に対して適用すると、1回目のデータ取得の対象である形状特徴データF1またはF10に対する反転処理を実行している間に、2回目のデータ取得の対象である形状特徴データF2またはF20のデータ取得を並列で行うことができる。そのため、レスポンスが早くなり被認証者の認証をより短時間で行う効果が得られる。
画像左右反転部131で反転された形状特徴データは、図4のステップS106では、クライアント制御部11又は左右手入力チェック部12により、もう一方の手の形状特徴データと所定範囲で一致するか比較する。所定範囲で一致しない場合(NO)、ステップS107に移行する。形状特徴データF1'が形状特徴データF2と所定範囲で一致する場合(YES)、ステップS108に移行する。
また、図7のステップS207では、クライアント制御部11又は左右手入力チェック部12により、もう一方の手の形状特徴データと所定範囲で一致するか比較する。形状特徴データF10'が形状特徴データF20と所定範囲で一致しない場合(NO)、ステップS208に移行する。形状特徴データF10'が形状特徴データF20と所定範囲で一致する場合(YES)、ステップS209に移行する。その他は、説明を省略するが、図7の照合処理のフローチャートに従って認証を行う。
被認証者によっては指が欠損している場合があり、生体情報として指紋を使えない場合がある。実施例2によれば、そのような場合でも、両手の同一部位の生体情報を利用して照合の精度を上げて認証をより正確にし、もって、FARを低減できる。
以上、実施例においては、照合する生体情報として、指紋や手の平静脈を例として説明した。しかし、生体情報は上記に限定されるものではない。例えば、生体情報として、掌紋や指静脈などを用いる構成としても良い。
また、実施例においては、形状特徴データは左右どちらの手であるか判定するため用いていた。しかし、左右の手の形状特徴データを認証処理に用いる構成としてよい。
以上、実施例について詳述したが、この実施例に限定されるものではなく、特許請求の範囲に記載された範囲内において、上記実施例以外にも種々の変形及び変更が可能である。
1 クライアント
2 読み取りセンサ
3 サーバ
4 通信路
5 通信路
11 クライアント制御部
12 左右手入力チェック部
13 左右対応テーブル
14 回転予測部
15 指紋照合部
16 静脈照合部
17 メモリ部
18 通信部
19 バス
131 画像左右反転部
21 指紋センサ部
22 静脈センサ部
23 ガイド
24 ケース
25 指紋読み取り範囲
26 静脈読み取り範囲
30 ストレージ部
31 サーバ制御部
35 指紋照合部
36 静脈照合部
37 メモリ部
38 通信部
39 バス
F1、F1'、F2、F10、F10'、F20 形状特徴データ
V1、V2、V10、V20 認証特徴データ
T1、T2、T3 指紋中心座標
BA、BB、BC、BD 指の付け根座標
SH 手の大きさ
2 読み取りセンサ
3 サーバ
4 通信路
5 通信路
11 クライアント制御部
12 左右手入力チェック部
13 左右対応テーブル
14 回転予測部
15 指紋照合部
16 静脈照合部
17 メモリ部
18 通信部
19 バス
131 画像左右反転部
21 指紋センサ部
22 静脈センサ部
23 ガイド
24 ケース
25 指紋読み取り範囲
26 静脈読み取り範囲
30 ストレージ部
31 サーバ制御部
35 指紋照合部
36 静脈照合部
37 メモリ部
38 通信部
39 バス
F1、F1'、F2、F10、F10'、F20 形状特徴データ
V1、V2、V10、V20 認証特徴データ
T1、T2、T3 指紋中心座標
BA、BB、BC、BD 指の付け根座標
SH 手の大きさ
Claims (4)
- 一方の手に特有で照合に用いる第一の照合用認証特徴データと、他方の手に特有で照合に用いる第二の照合用認証特徴データと、を取得する単一の読み取りセンサと、
一人分の前記第一の照合用認証特徴データと前記第二の照合用認証特徴データの夫々を、認証データとしてサーバに送信すると共に、照合結果を受信する通信部と、
前記第一の照合用認証特徴データを取得する際の前記一方の手の前記読み取りセンサに対する角度と、前記第二の照合用認証特徴データを取得する際の前記他方の手の前記読み取りセンサに対する角度との差異である予測回転角を計算する回転予測部とを有し、
前記通信部は、前記回転予測部で計算した前記予測回転角を前記サーバに送信する
ことを特徴とする生体認証装置。 - 前記読み取りセンサは、前記一方の手の形状をあらわす第一の照合用形状特徴データを更に取得可能であり、
前記回転予測部は前記読み取りセンサで取得された前記一方の手の形状から前記一方の手の大きさを計算し、前記計算した一方の手の大きさに基づいて前記予測回転角を計算することを特徴とする請求項1記載の生体認証装置。 - 一方の手に特有で照合に用いる第一の照合用認証特徴データと、他方の手に特有で照合に用いる第二の照合用認証特徴データと、を取得する読み取りセンサと、
前記第一の照合用認証特徴データと前記第二の照合用認証特徴データの夫々を送信すると共に、照合結果を受信する通信部と、
前記第一の照合用認証特徴データを取得する際の前記一方の手の前記読み取りセンサに対する角度と、前記第二の照合用認証特徴データを取得する際の前記他方の手の前記読み取りセンサに対する角度との差異である予測回転角を計算する回転予測部とを有し、
前記通信部は、前記回転予測部で計算した前記予測回転角を送信する
生体認証装置と、
前記生体認証装置の通信部から送信された前記第一の照合用認証特徴データと、前記第二の照合用認証特徴データ及び前記予測回転角とを受信するサーバ通信部と、
前記一方の手に特有であり登録される第一の登録用認証特徴データと前記他方の手に特有であり登録される第二の登録用認証特徴データとを保存するストレージ部と、
前記第一の登録用認証特徴データと前記第一の照合用認証特徴データとが所定の範囲で一致するか照合し、また、前記第二の登録用認証特徴データと前記予測回転角を用いて補正した前記第二の照合用認証特徴データとが所定の範囲で一致するか照合する照合部とを有し、
サーバ通信部は、前記照合結果を生体認証装置の前記通信部に送信する
サーバと、
を有する生体認証システム。 - 一方の手に特有で照合に用いる第一の照合用認証特徴データと、他方の手に特有で照合に用いる第二の照合用認証特徴データとを読み取りセンサで取得し、
前記読み取りセンサからの前記第一の照合用認証特徴データを装置からサーバへ送信し、
前記装置が、前記第一の照合用認証特徴データを取得する際の前記一方の手の前記読み取りセンサに対する角度と、前記第二の照合用認証特徴データを取得する際の前記他方の手の前記読み取りセンサに対する角度との差異である予測回転角を計算し、
前記第二の照合用認証特徴データと前記予測回転角とを前記装置から前記サーバへ送信し、
前記サーバが、前記一方の手に特有の第一の登録用認証特徴データと前記装置から受信した第一の照合用認証特徴データとが所定の範囲で一致するか照合し、また、前記他方の手に特有の第二の登録用認証特徴データと前記予測回転角を用いて補正した前記第二の照合用認証特徴データとが所定の範囲で一致するか照合し、照合結果を前記装置に送信することを特徴とする生体認証方法。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2013/050850 WO2014112081A1 (ja) | 2013-01-17 | 2013-01-17 | 生体認証装置、生体認証システム、及び生体認証方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2014112081A1 JPWO2014112081A1 (ja) | 2017-01-19 |
| JP6065025B2 true JP6065025B2 (ja) | 2017-01-25 |
Family
ID=51209202
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014557248A Active JP6065025B2 (ja) | 2013-01-17 | 2013-01-17 | 生体認証装置、生体認証システム、及び生体認証方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US9418274B2 (ja) |
| JP (1) | JP6065025B2 (ja) |
| WO (1) | WO2014112081A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TWI678661B (zh) * | 2018-08-31 | 2019-12-01 | 中華電信股份有限公司 | 具資料擴展性之掌紋辨識裝置及方法 |
| US11438330B2 (en) | 2017-07-24 | 2022-09-06 | Bernard GARCIA | Biometric cloud authentication gateway database system and method of use |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6241230B2 (ja) * | 2013-11-28 | 2017-12-06 | 富士通株式会社 | 生体情報判定装置及びプログラム |
| JP6134662B2 (ja) * | 2014-01-31 | 2017-05-24 | 株式会社 日立産業制御ソリューションズ | 生体認証装置および生体認証方法 |
| US10235582B2 (en) * | 2014-08-08 | 2019-03-19 | Gemalto Sa | Automated examination and processing of biometric data |
| JP6394323B2 (ja) * | 2014-11-25 | 2018-09-26 | 富士通株式会社 | 生体認証方法、生体認証プログラム、生体認証装置 |
| WO2016086341A1 (en) * | 2014-12-01 | 2016-06-09 | Dongguan Zkteco Electronic Technology Co., Ltd | System and method for acquiring multimodal biometric information |
| WO2016086343A1 (en) | 2014-12-01 | 2016-06-09 | Xiamen Zkteco Biometric Identification Technology Co., Ltd | System and method for personal identification based on multimodal biometric information |
| JP2016151831A (ja) * | 2015-02-16 | 2016-08-22 | 富士通株式会社 | 生体情報登録装置、生体情報登録方法、及び生体情報登録プログラム |
| NL2014444B1 (en) * | 2015-03-12 | 2017-01-06 | Pan Changbang | Finger scanner, and method of scanning a finger using the finger scanner. |
| US10963159B2 (en) * | 2016-01-26 | 2021-03-30 | Lenovo (Singapore) Pte. Ltd. | Virtual interface offset |
| US11494470B2 (en) * | 2016-10-24 | 2022-11-08 | Sony Corporation | Information processing apparatus and information processing method |
| CN107341385B (zh) * | 2017-06-15 | 2019-01-04 | 珠海格力电器股份有限公司 | 一种移动终端解锁方法及装置 |
| CN107370769B (zh) * | 2017-09-12 | 2020-10-23 | 中国联合网络通信集团有限公司 | 用户认证方法及系统 |
| US11756036B1 (en) * | 2019-12-13 | 2023-09-12 | Amazon Technologies, Inc. | Utilizing sensor data for automated user identification |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000102525A (ja) * | 1998-09-28 | 2000-04-11 | Hiroko Oki | 本人認証方法および本人認証装置並びに本人認証用記録媒体 |
| JP2007156790A (ja) * | 2005-12-05 | 2007-06-21 | Hitachi Omron Terminal Solutions Corp | 複数種の生体情報による認証をおこなう認証技術 |
| JP2007249291A (ja) | 2006-03-13 | 2007-09-27 | Oki Electric Ind Co Ltd | 顧客認証装置 |
| JP4762805B2 (ja) | 2006-06-29 | 2011-08-31 | 富士通株式会社 | 生体認証方法及び生体認証システム |
| JP4786483B2 (ja) | 2006-09-14 | 2011-10-05 | 富士通株式会社 | 生体認証装置の生体誘導制御方法及び生体認証装置 |
| JP2010146158A (ja) * | 2008-12-17 | 2010-07-01 | Fujitsu Ltd | 生体認証装置、生体認証方法、及びコンピュータプログラム |
| JP5402137B2 (ja) * | 2009-03-24 | 2014-01-29 | 富士通株式会社 | 生体認証装置 |
| JP2010257007A (ja) * | 2009-04-22 | 2010-11-11 | Nippon Separate System:Kk | 入退出管理装置 |
| US8548206B2 (en) * | 2011-01-20 | 2013-10-01 | Daon Holdings Limited | Methods and systems for capturing biometric data |
-
2013
- 2013-01-17 JP JP2014557248A patent/JP6065025B2/ja active Active
- 2013-01-17 WO PCT/JP2013/050850 patent/WO2014112081A1/ja active Application Filing
-
2015
- 2015-07-07 US US14/792,688 patent/US9418274B2/en active Active
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11438330B2 (en) | 2017-07-24 | 2022-09-06 | Bernard GARCIA | Biometric cloud authentication gateway database system and method of use |
| TWI678661B (zh) * | 2018-08-31 | 2019-12-01 | 中華電信股份有限公司 | 具資料擴展性之掌紋辨識裝置及方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2014112081A1 (ja) | 2014-07-24 |
| US20150310252A1 (en) | 2015-10-29 |
| US9418274B2 (en) | 2016-08-16 |
| JPWO2014112081A1 (ja) | 2017-01-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6065025B2 (ja) | 生体認証装置、生体認証システム、及び生体認証方法 | |
| US8699763B2 (en) | Biometric information processing device, biometric information processing method and computer-readable storage medium storing a biometric information processing program | |
| JP5445584B2 (ja) | 生体認証装置、生体認証方法及び生体認証用コンピュータプログラム | |
| JP5121681B2 (ja) | 生体認証システム、認証クライアント端末、及び生体認証方法 | |
| US9251396B2 (en) | Touchless fingerprinting acquisition and processing application for mobile devices | |
| US9298996B2 (en) | Biometric authentication device and method | |
| WO2013161077A1 (ja) | 生体認証装置、生体認証プログラム及び生体認証方法 | |
| KR101603469B1 (ko) | 생체 인증 장치, 생체 인증 방법 및 생체 인증용 컴퓨터 프로그램 | |
| JP6024141B2 (ja) | 生体情報処理装置、生体情報処理方法、および生体情報処理プログラム | |
| JP4592341B2 (ja) | 生体情報認証装置 | |
| JP2001344213A5 (ja) | ||
| JP6394323B2 (ja) | 生体認証方法、生体認証プログラム、生体認証装置 | |
| EP2530620B1 (en) | Biometric information process device, biometric information process method, and computer readable medium | |
| JP6658188B2 (ja) | 画像処理装置、画像処理方法および画像処理プログラム | |
| JP2009129252A (ja) | 生体認証装置、生体認証方法およびコンピュータプログラム | |
| WO2018198500A1 (ja) | 照合装置、照合方法および照合プログラム | |
| US20150269410A1 (en) | Alignment apparatus, alignment method, and alignment computer program | |
| US9977889B2 (en) | Device for checking the authenticity of a fingerprint | |
| US10528805B2 (en) | Biometric authentication apparatus, biometric authentication method, and computer-readable storage medium | |
| JP2015129997A (ja) | 生体情報処理装置、生体情報処理方法及び生体情報処理用コンピュータプログラム | |
| KR102333453B1 (ko) | 지문 및 얼굴 영상을 이용한 스마트폰 기반 신원확인 방법 | |
| JPH07114640A (ja) | 個人認証装置 | |
| JP2011076369A (ja) | 生体認証装置及び生体認証方法 | |
| WO2015115075A1 (ja) | 個人認証システム、個人情報媒体、端末装置、及び、個人認証方法 | |
| JP2010165132A (ja) | 個人識別装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20161122 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20161205 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6065025 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |