JP6036131B2 - 負作動型電磁ブレーキ装置とその制御方法及び制御装置、駆動装置 - Google Patents
負作動型電磁ブレーキ装置とその制御方法及び制御装置、駆動装置 Download PDFInfo
- Publication number
- JP6036131B2 JP6036131B2 JP2012221506A JP2012221506A JP6036131B2 JP 6036131 B2 JP6036131 B2 JP 6036131B2 JP 2012221506 A JP2012221506 A JP 2012221506A JP 2012221506 A JP2012221506 A JP 2012221506A JP 6036131 B2 JP6036131 B2 JP 6036131B2
- Authority
- JP
- Japan
- Prior art keywords
- armature
- brake
- coil
- yoke
- magnetic field
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Landscapes
- Braking Arrangements (AREA)
- Dynamo-Electric Clutches, Dynamo-Electric Brakes (AREA)
Description
また、本発明は、前記第1の永久磁石と前記第2の永久磁石とは、互いに引き寄せ合う向きに設置されていることを特徴とする負作動型電磁ブレーキ装置を提供する。
また、本発明は、前記第2の永久磁石は、第1のアーマチュアヨークと第2のアーマチュアヨークとに挟まれており、固着されていることを特徴とする負作動型電磁ブレーキ装置を提供する。
また、本発明は、前記第1のアーマチュアヨークは、円環状の板形状となっており、前記第2のアーマチュアヨークは、外周部と内周部とで厚さの異なる円環状の板形状となっていることを特徴とする負作動型電磁ブレーキ装置を提供する。
また、本発明は、前記制御装置には、直流電圧を発生する直流電圧発生部と、ブレーキ解放時には、前記マグネットヨークの前記アーマチュアを引き寄せる磁界を弱めるように前記コイルと前記直流電圧発生部とを接続し、ブレーキ作動時には、前記マグネットヨークの前記アーマチュアを引き寄せる磁界を強めるように前記コイルと前記直流電圧発生部とを接続する接続部と、を備えることを特徴とする負作動型電磁ブレーキ装置を提供する。
また、本発明は、前記直流電圧発生部が、複数からなり、ブレーキ解放用のものと、ブレーキ作動用のものと、を独立して有することを特徴とする負作動型電磁ブレーキ装置を提供する。
また、本発明は、前記直流電圧発生部について、ブレーキ作動用のものがブレーキ解放用のものより、発生する電圧が大きいことを特徴とする負作動型電磁ブレーキ装置を提供する。
また、本発明は、前記直流電圧発生部について、ブレーキ作動用のものがブレーキ解放用のものより、発生する電圧が小さいことを特徴とする負作動型電磁ブレーキ装置を提供する。
また、本発明は、前記直流電圧発生部について、ブレーキ作動用のものに可変抵抗器を有し、発生する電圧を変化させることができ、ブレーキトルクの制御を可能としていることを特徴とする負作動型電磁ブレーキ装置を提供する。
また、本発明は、アーマチュアと、前記アーマチュアを引き寄せる磁界を発生する第1の永久磁石及び前記アーマチュアを引き寄せる磁界を変化させるコイルを有するマグネットヨークと、前記アーマチュアと前記マグネットヨークとの間隙を広げる方向に前記アーマチュアを付勢する弾性部材と、ブレーキの作動を制御する制御装置と、前記アーマチュアに備えられている第2の永久磁石と、を含む負作動型電磁ブレーキ装置を制御する方法であって、ブレーキ解放時には、前記マグネットヨークの前記アーマチュアを引き寄せる磁界を弱めるように前記コイルに直流電圧を印加し、ブレーキ作動時には、前記マグネットヨークの前記アーマチュアを引き寄せる磁界を強めるように前記コイルに直流電圧を印加することを特徴とする負作動型電磁ブレーキ装置の制御方法を提供する。
また、本発明は、アーマチュアと、前記アーマチュアを引き寄せる磁界を発生する第1の永久磁石及び前記アーマチュアを引き寄せる磁界を変化させるコイルを有するマグネットヨークと、前記アーマチュアと前記マグネットヨークとの間隙を広げる方向に前記アーマチュアを付勢する弾性部材と、前記アーマチュアに備えられている第2の永久磁石と、を含む負作動型電磁ブレーキ装置を制御する制御装置であって、前記制御装置には、直流電圧を発生する直流電圧発生部と、ブレーキ解放時には、前記マグネットヨークの前記アーマチュアを引き寄せる磁界を弱めるように前記コイルと前記直流電圧発生部とを接続し、ブレーキ作動時には、前記マグネットヨークの前記アーマチュアを引き寄せる磁界を強めるように前記コイルと前記直流電圧発生部とを接続する接続部と、を備えることを特徴とする負作動型電磁ブレーキ装置の制御装置を提供する。
また、本発明は、上記の負作動型電磁ブレーキ装置を備えたことを特徴とする駆動装置を提供する。
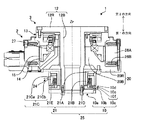
このような構造により、コイル21Eに印加する電圧でブレーキの解放や作動を制御する。ブレーキ解放時には、第1の永久磁石21Dの磁力を弱める方向に磁界が発生するようコイル21Eに電圧が印加される。これにより、アーマチュア10cは、板ばね10bにより第1の方向(フランジ10a側)に引っ張られ、マグネットヨーク21とアーマチュア10cとの間に間隙ができブレーキが解放される。一方、ブレーキが作動すると、ブレーキ機構部25は、ロータ3を制動して所定の位置に固定することができる。マグネットヨーク21のコイル21Eに電圧を印加しないと、マグネットヨーク21のコイル21Eが磁界を発生しないので、マグネットヨーク21の第1の永久磁石21Dがアーマチュア10cを自身の磁力によって引き寄せ、アーマチュア10cとマグネットヨーク21とが接触する。その結果、アーマチュア10cとマグネットヨーク21との間に摩擦力が発生し、この摩擦力が停止トルクとしてアーマチュア10cに作用し、ダイレクトドライブモータ1のロータ3の制動力となる。本発明では、更に制動力を高めるために、第1の永久磁石21Dの磁力に加えて、コイル21Eの磁力も付与できるような電圧を印加する。これについては、実施例を用いて後述する。
このように、静止体であるマグネットヨーク21に第1の永久磁石21Dを、回転体であるアーマチュア10cに第2の永久磁石10eを、磁気回路上、非通電状態で互いに引き寄せ合う極性で配置することにより、磁力を上げることができブレーキ力を上げることができる。高磁力の永久磁石はレアアースを含有しており、昨今、価格が高騰している。数年で10倍になったネオジム系磁石を代表に永久磁石及び、ジスプロシウム等永久磁石への添加物の価格高騰は非常に著しい。コストを軽減するためには、比較的表面磁束の低い、フェライト系磁石のような、廉価な永久磁石を使わざるを得なくなってきている。しかし、このような廉価な永久磁石を使用したものでは、従来のブレーキ構造では、本来必要としているブレ−キトルクが得られない。本発明の実施形態では、廉価な永久磁石を使用しても必要なブレーキトルクを得うる構成となっている。また、フェライト系磁石を用いることにより、高温での使用も可能な電磁ブレーキとなっている。
ブレーキ連結軸12の円環状部12Rの第1の方向側の面の外周部には、ダイレクトドライブモータ1の回転中心軸Zrと同軸の円筒状のモータ出力軸13がボルトで緊締され固着されている。モータ出力軸13の第1の方向側の端部には、ダイレクトドライブモータ1の回転中心軸Zrと同軸のロータフランジ14が固着されている。ロータフランジ14の外周面には、ステータ2側のモータコア26A及び巻線26Bと対向するように、永久磁石15が配置されている。これらの部材がロータ3を構成する。
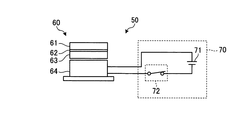
図2及び図3は、本発明の第1実施例に係る負作動型電磁ブレーキ装置の制御装置とブレーキ機構部とを接続した様子を示す模式図である。図2は、負作動型電磁ブレーキ装置の解放時を示す模式図であり、図3は、負作動型電磁ブレーキ装置の作動時を示す模式図である。
図4及び図5は、本発明の第2実施例に係る負作動型電磁ブレーキ装置の制御装置とブレーキ機構部とを接続した様子を示す模式図である。図4は、負作動型電磁ブレーキ装置の解放時を示す模式図であり、図5は、負作動型電磁ブレーキ装置の作動時を示す模式図である。本実施例においては、前述の第1実施例と同様の部位については、共通の符号を用い説明を省略する。
図6及び図7は、本発明の第3実施例に係る負作動型電磁ブレーキ装置の制御装置とブレーキ機構部とを接続した様子を示す模式図である。図6は、負作動型電磁ブレーキ装置の解放時を示す模式図であり、図7は、負作動型電磁ブレーキ装置の作動時を示す模式図である。本実施例においては、前述の第1実施例と同様の部位については、共通の符号を用い説明を省略する。
図8及び図9は、本発明の第4実施例に係る負作動型電磁ブレーキ装置の制御装置とブレーキ機構部とを接続した様子を示す模式図である。図8は、負作動型電磁ブレーキ装置の解放時を示す模式図であり、図9は、負作動型電磁ブレーキ装置の作動時を示す模式図である。本実施例においては、前述の第1実施例と同様の部位については、共通の符号を用い説明を省略する。
2 ステータ
3 ロータ
10 回転部
10a、61 フランジ
10b、62 板ばね(弾性部材)
10c、63 アーマチュア
10d 第1のアーマチュアヨーク
10e 第2の永久磁石
10f 第2のアーマチュアヨーク
12 ブレーキ連結軸
13 モータ出力軸
14 ロータフランジ
15 永久磁石
20 モータベース
21、64 マグネットヨーク
21A、21B、21C ヨーク
21D 第1の永久磁石
21E コイル
24 リード線
25、60 ブレーキ機構部
26A モータコア
26B 巻線
27 クロスローラ軸受
30、50 負作動型電磁ブレーキ装置
40、70 制御装置(負作動型電磁ブレーキ装置の制御装置)
41、71 直流電圧発生部
41a 解放用直流電圧発生部
41b 作動用直流電圧発生部
42、72 接続部(スイッチ)
43 可変抵抗器
Claims (7)
- アーマチュアと、前記アーマチュアを引き寄せる磁界を発生する第1の永久磁石及び前記アーマチュアを引き寄せる磁界を変化させるコイルを有するマグネットヨークと、前記アーマチュアと前記マグネットヨークとの間隙を広げる方向に前記アーマチュアを付勢する弾性部材と、ブレーキの作動を制御する制御装置と、を含む負作動型電磁ブレーキ装置であって、前記アーマチュアには、第2の永久磁石を備え、
前記制御装置は、
ブレーキ解放用の第1の直流電圧発生部と、
ブレーキ作動用の第2の直流電圧発生部と、
前記第2の直流電圧発生部に直列に接続された可変抵抗器と、
ブレーキ解放時には、前記マグネットヨークの前記アーマチュアを引き寄せる磁界を弱めるように前記コイルと前記第1の直流電圧発生部とを直列接続し、ブレーキ作動時には、前記マグネットヨークの前記アーマチュアを引き寄せる磁界を強めるように前記コイルと前記第2の直流電圧発生部と前記可変抵抗器とを直列接続する接続部と、
を備え、
ブレーキ解放時の前記コイルへの印加電圧を保ったまま、ブレーキ作動時の前記コイルへの印加電圧を可変にすることで、ブレーキトルクの調整を可能とする制御を行うことを特徴とする負作動型電磁ブレーキ装置。 - 前記第1の永久磁石と前記第2の永久磁石とは、互いに引き寄せ合う向きに設置されていることを特徴とする請求項1記載の負作動型電磁ブレーキ装置。
- 前記第2の永久磁石は、第1のアーマチュアヨークと第2のアーマチュアヨークとに挟まれており、固着されていることを特徴とする請求項1又は2のいずれか1項に記載の負作動型電磁ブレーキ装置。
- 前記第1のアーマチュアヨークは、円環状の板形状となっており、前記第2のアーマチュアヨークは、外周部と内周部とで厚さの異なる円環状の板形状となっていることを特徴とする請求項3記載の負作動型電磁ブレーキ装置。
- アーマチュアと、前記アーマチュアを引き寄せる磁界を発生する第1の永久磁石及び前記アーマチュアを引き寄せる磁界を変化させるコイルを有するマグネットヨークと、前記アーマチュアと前記マグネットヨークとの間隙を広げる方向に前記アーマチュアを付勢する弾性部材と、ブレーキの作動を制御する制御装置と、前記アーマチュアに備えられている第2の永久磁石と、を含む負作動型電磁ブレーキ装置を制御する方法であって、
前記制御装置は、
ブレーキ解放用の第1の直流電圧発生部と、
ブレーキ作動用の第2の直流電圧発生部と、
前記第2の直流電圧発生部に直列に接続された可変抵抗器と、
を備え、
ブレーキ解放時には、前記マグネットヨークの前記アーマチュアを引き寄せる磁界を弱めるように前記コイルと前記第1の直流電圧発生部を直列接続し、
ブレーキ作動時には、前記マグネットヨークの前記アーマチュアを引き寄せる磁界を強めるように前記コイルと前記第2の直流電圧発生部と前記可変抵抗器とを直列接続することにより、
ブレーキ解放時の前記コイルへの印加電圧を保ったまま、ブレーキ作動時の前記コイルへの印加電圧を可変にすることで、ブレーキトルクの調整を可能とする制御を行うことを特徴とする負作動型電磁ブレーキ装置の制御方法。 - アーマチュアと、前記アーマチュアを引き寄せる磁界を発生する第1の永久磁石及び前記アーマチュアを引き寄せる磁界を変化させるコイルを有するマグネットヨークと、前記アーマチュアと前記マグネットヨークとの間隙を広げる方向に前記アーマチュアを付勢する弾性部材と、前記アーマチュアに備えられている第2の永久磁石と、を含む負作動型電磁ブレーキ装置を制御する制御装置であって、
ブレーキ解放用の第1の直流電圧発生部と、
ブレーキ作動用の第2の直流電圧発生部と、
前記第2の直流電圧発生部に直列に接続された可変抵抗器と、
ブレーキ解放時には、前記マグネットヨークの前記アーマチュアを引き寄せる磁界を弱めるように前記コイルと前記第1の直流電圧発生部とを直列接続し、ブレーキ作動時には、前記マグネットヨークの前記アーマチュアを引き寄せる磁界を強めるように前記コイルと前記第2の直流電圧発生部と前記可変抵抗器とを直列接続する接続部と、
を備え、
ブレーキ解放時の前記コイルへの印加電圧を保ったまま、ブレーキ作動時の前記コイルへの印加電圧を可変にすることで、ブレーキトルクの調整を可能とする制御を行うことを特徴とする負作動型電磁ブレーキ装置の制御装置。 - 請求項1〜4の何れか1項に記載の負作動型電磁ブレーキ装置を備えたことを特徴とする駆動装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012221506A JP6036131B2 (ja) | 2012-10-03 | 2012-10-03 | 負作動型電磁ブレーキ装置とその制御方法及び制御装置、駆動装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012221506A JP6036131B2 (ja) | 2012-10-03 | 2012-10-03 | 負作動型電磁ブレーキ装置とその制御方法及び制御装置、駆動装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014075894A JP2014075894A (ja) | 2014-04-24 |
| JP6036131B2 true JP6036131B2 (ja) | 2016-11-30 |
Family
ID=50749678
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012221506A Active JP6036131B2 (ja) | 2012-10-03 | 2012-10-03 | 負作動型電磁ブレーキ装置とその制御方法及び制御装置、駆動装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6036131B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7501332B2 (ja) * | 2020-12-07 | 2024-06-18 | 日本精工株式会社 | ロータリーアクチュエータ |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3899061A (en) * | 1974-04-29 | 1975-08-12 | Warner Electric Brake & Clutch | Excitation control for normally engaged, electrically released magnetic coupling |
| JPS626991Y2 (ja) * | 1980-09-08 | 1987-02-18 | ||
| JPS62114228U (ja) * | 1986-01-09 | 1987-07-21 | ||
| JP2543451Y2 (ja) * | 1990-12-21 | 1997-08-06 | 株式会社コガネイ | ソレノイド用駆動回路およびそれを用いた電磁弁 |
| JP2010265837A (ja) * | 2009-05-15 | 2010-11-25 | Toyota Motor Corp | ウォーターポンプ |
-
2012
- 2012-10-03 JP JP2012221506A patent/JP6036131B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2014075894A (ja) | 2014-04-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN102714443B (zh) | 旋转单相电磁执行机构 | |
| CN110662905B (zh) | 磁致动制动器 | |
| US8739952B2 (en) | Flip-flop clutch | |
| JP4916500B2 (ja) | ロータに直接磁気ブレーキを設けた電気機械 | |
| JP2015006126A (ja) | 統合ブレーキ及び駆動回路を有するステッピングモータ | |
| CN111600428B (zh) | 电动机制动器 | |
| CN105720791A (zh) | 一种线圈旋转型电磁涡流调速器 | |
| CN109565219B (zh) | 电动机装置 | |
| CN105790543A (zh) | 一种线圈静止型电磁涡流调速器 | |
| JP6036131B2 (ja) | 負作動型電磁ブレーキ装置とその制御方法及び制御装置、駆動装置 | |
| JP7741077B2 (ja) | 電気モータ及びその制御方法 | |
| JP5522187B2 (ja) | 負作動型電磁ブレーキ装置とその制御方法及び制御装置、駆動装置 | |
| WO2013157316A1 (ja) | 自己保持型ソレノイド及びツースクラッチ | |
| CN205195520U (zh) | 能在较高温度环境下实施转动驱动装置 | |
| JPH05300691A (ja) | 小型モータ | |
| JP6658701B2 (ja) | 磁気アクチュエータ | |
| JP6492671B2 (ja) | 動力伝達装置 | |
| US12500478B2 (en) | Rotator | |
| JP2007215368A (ja) | ブレーキ付モータ | |
| JP5955237B2 (ja) | ブレーキ付き回転電機 | |
| KR102820531B1 (ko) | 잔류 자기장을 통한 접촉으로 유지 토크를 인가하기 위해 전기 모터 및 전기 모터의 회전자에 이동 가능하게 배열된 전자석을 갖는 서보 드라이브 | |
| JP2015122905A (ja) | ブレーキモータ、および巻上機 | |
| JP2005094932A (ja) | モータ駆動装置 | |
| CN101970896A (zh) | 电控制动器 | |
| CN105790457B (zh) | 高性能旋转电磁执行器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150514 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20150514 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160315 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160316 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160512 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20161004 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20161017 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6036131 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |