JP5973707B2 - 三次元内視鏡装置 - Google Patents
三次元内視鏡装置 Download PDFInfo
- Publication number
- JP5973707B2 JP5973707B2 JP2011226756A JP2011226756A JP5973707B2 JP 5973707 B2 JP5973707 B2 JP 5973707B2 JP 2011226756 A JP2011226756 A JP 2011226756A JP 2011226756 A JP2011226756 A JP 2011226756A JP 5973707 B2 JP5973707 B2 JP 5973707B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- eye
- eye image
- video signal
- divided
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00004—Operational features of endoscopes characterised by electronic signal processing
- A61B1/00009—Operational features of endoscopes characterised by electronic signal processing of image signals during a use of endoscope
- A61B1/000095—Operational features of endoscopes characterised by electronic signal processing of image signals during a use of endoscope for image enhancement
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00163—Optical arrangements
- A61B1/00193—Optical arrangements adapted for stereoscopic vision
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00163—Optical arrangements
- A61B1/00194—Optical arrangements adapted for three-dimensional imaging
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/04—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances
- A61B1/045—Control thereof
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B23/00—Telescopes, e.g. binoculars; Periscopes; Instruments for viewing the inside of hollow bodies; Viewfinders; Optical aiming or sighting devices
- G02B23/24—Instruments or systems for viewing the inside of hollow bodies, e.g. fibrescopes
- G02B23/2407—Optical details
- G02B23/2415—Stereoscopic endoscopes
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/20—Image signal generators
- H04N13/204—Image signal generators using stereoscopic image cameras
- H04N13/207—Image signal generators using stereoscopic image cameras using a single 2D image sensor
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/50—Constructional details
- H04N23/555—Constructional details for picking-up images in sites, inaccessible due to their dimensions or hazardous conditions, e.g. endoscopes or borescopes
Description
Claims (4)
- 視差を有する左目用画像と右目用画像とを取得する三次元内視鏡装置において、
前記左目用画像と前記右目用画像のそれぞれに対応する光を結像する2系統の光学系を備えると共に、前記2系統の光学系を通して得られる第1の光及び第2の光が単一の受光面に別々に結像され、結像された第1の像及び第2の像に基づく映像信号を生成するMOS型センサを備える内視鏡スコープと、
前記映像信号に画像処理を行う画像処理プロセッサと、
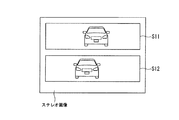
前記画像処理プロセッサによって処理された前記映像信号に基づいて、前記左目用画像と前記右目用画像を含む画像を表示する画像表示装置と、
を備え、
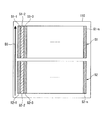
前記MOS型センサの前記受光面に結像された前記第1の像の中心と前記第2の像の中心とを結ぶ直線が視差方向と直交し、
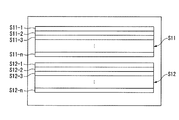
前記MOS型センサの前記受光面において、前記第1の像が結像される第1の領域が複数個の第1の分割領域に分割され、前記第2の像が結像される第2の領域が複数個の第2の分割領域に分割され、
前記MOS型センサは、前記第1の領域と前記第2の領域から前記映像信号を構成するデータを読み出す際、前記左目用画像に対応する前記第1の分割領域と前記右目用画像に対応する前記第2の分割領域との、互いに対応する位置を交互にラスタスキャンしてデータを読み出し、前記ラスタスキャンの方向が前記視差方向と直交することを特徴とする三次元内視鏡装置。 - 前記画像処理プロセッサは、
前記画像処理を行う画像処理部と、
前記映像信号を、前記左目用画像に対応する左目用映像信号と、前記右目用画像に対応する右目用映像信号とに分離する分離部と、
前記左目用映像信号及び前記右目用映像信号のそれぞれを構成するデータの順序を、前記ラスタスキャンにより前記視差方向と同一方向に前記複数個の前記第1の分割領域及び前記複数個の前記第2の分割領域をスキャンしてデータを読み出した場合のデータの順序と同一となるように並べ替える調整部と、
を備えることを特徴とする請求項1に記載の三次元内視鏡装置。 - 前記画像処理プロセッサは、
通常動作を行う前、あるいは前記通常動作の途中で、校正動作を指示する制御部と、
前記校正動作時に前記左目用画像及び前記右目用画像のズレ量を検出するズレ検出部と、
前記校正動作時に前記左目用画像及び前記右目用画像の補正量を算出する補正量算出部と、
前記左目用画像及び前記右目用画像の前記補正量に応じて前記映像信号に補正を行う補正部と、
を備えることを特徴とする請求項2に記載の三次元内視鏡装置。 - 前記ズレ検出部は、明るさ、ホワイトバランス、大きさ、回転、平行移動の少なくとも1つ以上のズレの種類ごとのズレ量を検出し、
前記補正量算出部は、前記ズレの種類ごとのズレ量に対応した補正量を算出することを特徴とする請求項3に記載の三次元内視鏡装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011226756A JP5973707B2 (ja) | 2011-10-14 | 2011-10-14 | 三次元内視鏡装置 |
| CN201280050124.XA CN103875243B (zh) | 2011-10-14 | 2012-10-12 | 三维内窥镜装置 |
| PCT/JP2012/076461 WO2013054891A1 (ja) | 2011-10-14 | 2012-10-12 | 三次元内視鏡装置 |
| EP12840320.1A EP2768226B1 (en) | 2011-10-14 | 2012-10-12 | 3d endoscope device |
| US14/248,931 US20140218479A1 (en) | 2011-10-14 | 2014-04-09 | 3d endoscope device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011226756A JP5973707B2 (ja) | 2011-10-14 | 2011-10-14 | 三次元内視鏡装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2013090035A JP2013090035A (ja) | 2013-05-13 |
| JP2013090035A5 JP2013090035A5 (ja) | 2014-10-30 |
| JP5973707B2 true JP5973707B2 (ja) | 2016-08-23 |
Family
ID=48081936
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011226756A Active JP5973707B2 (ja) | 2011-10-14 | 2011-10-14 | 三次元内視鏡装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20140218479A1 (ja) |
| EP (1) | EP2768226B1 (ja) |
| JP (1) | JP5973707B2 (ja) |
| CN (1) | CN103875243B (ja) |
| WO (1) | WO2013054891A1 (ja) |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6560485B2 (ja) * | 2014-04-17 | 2019-08-14 | ローム株式会社 | 診断システム |
| WO2014175223A1 (ja) | 2013-04-22 | 2014-10-30 | ローム株式会社 | 癌診断装置、診断システム、診断装置 |
| JP6265988B2 (ja) * | 2013-07-04 | 2018-01-24 | オリンパス株式会社 | 内視鏡装置 |
| JP5897222B2 (ja) * | 2013-12-05 | 2016-03-30 | オリンパス株式会社 | 立体内視鏡システム |
| WO2016017482A1 (ja) * | 2014-07-28 | 2016-02-04 | オリンパス株式会社 | 立体観察装置のための制御装置、立体観察システム及び立体観察装置の制御方法 |
| EP3103380A4 (en) * | 2014-09-09 | 2017-11-29 | Olympus Corporation | Endoscope system and method for operating endoscope system |
| CN105812776A (zh) * | 2014-12-29 | 2016-07-27 | 广东省明医医疗慈善基金会 | 基于软镜的立体显示系统及方法 |
| CN205610834U (zh) * | 2014-12-29 | 2016-09-28 | 深圳超多维光电子有限公司 | 立体显示系统 |
| CN105812774B (zh) * | 2014-12-29 | 2019-05-21 | 广东省明医医疗慈善基金会 | 基于插管镜的立体显示系统及方法 |
| JPWO2016208664A1 (ja) * | 2015-06-25 | 2018-04-12 | オリンパス株式会社 | 内視鏡装置 |
| CN104935915B (zh) * | 2015-07-17 | 2018-05-11 | 珠海康弘发展有限公司 | 成像装置、三维成像系统及三维成像方法 |
| CN106361255B (zh) * | 2016-11-10 | 2020-07-14 | 微创(上海)医疗机器人有限公司 | 3d电子内窥镜 |
| WO2019053804A1 (ja) * | 2017-09-13 | 2019-03-21 | オリンパス株式会社 | 内視鏡装置、内視鏡装置の作動方法及びプログラム |
| JP7181294B2 (ja) * | 2018-07-20 | 2022-11-30 | オリンパス株式会社 | 撮像ユニット、内視鏡および内視鏡システム |
| EP4024115A4 (en) * | 2019-10-17 | 2022-11-02 | Sony Group Corporation | SURGICAL INFORMATION PROCESSING DEVICE, SURGICAL INFORMATION PROCESSING METHOD AND SURGICAL INFORMATION PROCESSING PROGRAM |
| CN111009009A (zh) * | 2019-12-11 | 2020-04-14 | 苏州新光维医疗科技有限公司 | 一种内窥镜3d图像调节方法 |
| CN110995997A (zh) * | 2019-12-11 | 2020-04-10 | 苏州新光维医疗科技有限公司 | 一种单镜头内窥镜图像处理转换方法 |
| WO2023084706A1 (ja) * | 2021-11-11 | 2023-05-19 | オリンパスメディカルシステムズ株式会社 | 内視鏡プロセッサ、プログラム、およびフォーカスレンズの制御方法 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5835133A (en) * | 1996-01-23 | 1998-11-10 | Silicon Graphics, Inc. | Optical system for single camera stereo video |
| JPH09265047A (ja) * | 1996-03-27 | 1997-10-07 | Matsushita Electric Ind Co Ltd | 電子内視鏡装置 |
| EP0971261B1 (en) * | 1998-07-09 | 2004-10-20 | Matsushita Electric Industrial Co., Ltd. | Stereoscopic picture obtaining device |
| JP3706326B2 (ja) * | 2001-10-17 | 2005-10-12 | オリンパス株式会社 | 内視鏡装置 |
| CN100554878C (zh) * | 2003-05-29 | 2009-10-28 | 奥林巴斯株式会社 | 立体光学模块和立体摄像机 |
| WO2004106857A1 (ja) * | 2003-05-29 | 2004-12-09 | Olympus Corporation | ステレオ光学モジュール及びステレオカメラ |
| JP2006181021A (ja) * | 2004-12-27 | 2006-07-13 | Media Technology:Kk | 電子内視鏡装置 |
| CN100527099C (zh) * | 2005-02-15 | 2009-08-12 | 皇家飞利浦电子股份有限公司 | 用于提高数据处理设备的存储单元的性能的装置和方法 |
| US8814779B2 (en) * | 2006-12-21 | 2014-08-26 | Intuitive Surgical Operations, Inc. | Stereoscopic endoscope |
| JP5137546B2 (ja) * | 2007-12-05 | 2013-02-06 | Hoya株式会社 | 撮像素子制御ユニット、電子内視鏡、および内視鏡システム |
| JP5638791B2 (ja) * | 2009-11-25 | 2014-12-10 | オリンパスイメージング株式会社 | 撮像装置 |
| US8988504B2 (en) * | 2010-06-03 | 2015-03-24 | Semiconductor Components Industries, Llc | Imaging systems with integrated stereo imagers |
| US20120007954A1 (en) * | 2010-07-08 | 2012-01-12 | Texas Instruments Incorporated | Method and apparatus for a disparity-based improvement of stereo camera calibration |
-
2011
- 2011-10-14 JP JP2011226756A patent/JP5973707B2/ja active Active
-
2012
- 2012-10-12 WO PCT/JP2012/076461 patent/WO2013054891A1/ja active Application Filing
- 2012-10-12 EP EP12840320.1A patent/EP2768226B1/en not_active Not-in-force
- 2012-10-12 CN CN201280050124.XA patent/CN103875243B/zh active Active
-
2014
- 2014-04-09 US US14/248,931 patent/US20140218479A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| EP2768226B1 (en) | 2019-07-31 |
| EP2768226A4 (en) | 2015-06-03 |
| CN103875243A (zh) | 2014-06-18 |
| EP2768226A1 (en) | 2014-08-20 |
| US20140218479A1 (en) | 2014-08-07 |
| WO2013054891A1 (ja) | 2013-04-18 |
| CN103875243B (zh) | 2017-05-17 |
| JP2013090035A (ja) | 2013-05-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5973707B2 (ja) | 三次元内視鏡装置 | |
| JP5238429B2 (ja) | 立体映像撮影装置および立体映像撮影システム | |
| JP5673008B2 (ja) | 画像処理装置、立体画像表示装置および立体画像表示システム、ならびに立体画像表示装置の視差ずれ検出方法および立体画像表示装置の製造方法 | |
| JP5982751B2 (ja) | 画像処理装置、および画像処理方法、並びにプログラム | |
| JP2013090035A5 (ja) | ||
| US8130259B2 (en) | Three-dimensional display device and method as well as program | |
| JP5881732B2 (ja) | 画像処理装置、立体画像表示装置、画像処理方法および画像処理プログラム | |
| JP2009524349A (ja) | 立体表示システムの調整方法 | |
| JP2010263501A (ja) | 撮像装置 | |
| WO2015132828A1 (ja) | 映像表示方法、及び、映像表示装置 | |
| WO2011125461A1 (ja) | 画像生成装置及び方法並びにプリンタ | |
| WO2018233275A1 (zh) | 裸眼3d显示方法、装置和终端设备 | |
| JP5439686B2 (ja) | 立体画像表示装置及び立体画像表示方法 | |
| TW201225658A (en) | Imaging device, image-processing device, image-processing method, and image-processing program | |
| US9800861B2 (en) | Image capture apparatus and image signal processing apparatus | |
| JP2012133185A (ja) | 撮像装置 | |
| JP5711104B2 (ja) | 画像表示装置、方法、プログラム、及び画像処理装置 | |
| TWI500314B (zh) | A portrait processing device, a three-dimensional portrait display device, and a portrait processing method | |
| JP2014007648A (ja) | 画像処理装置と画像処理方法およびプログラム | |
| JP5088973B2 (ja) | 立体撮像装置およびその撮像方法 | |
| JP5143291B2 (ja) | 画像処理装置、方法、および立体画像表示装置 | |
| JP2013105000A (ja) | 映像表示装置及び映像表示方法 | |
| JP5453328B2 (ja) | 立体撮像システム、補正装置およびそのプログラム | |
| JP6045280B2 (ja) | 撮像装置 | |
| JP2015144457A (ja) | 画像表示装置、方法、及びプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140911 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140911 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20140912 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20151215 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160120 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20160121 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160628 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160715 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5973707 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |