JP5892425B2 - コスト算出装置、コスト算出プログラム、及びナビゲーション装置 - Google Patents
コスト算出装置、コスト算出プログラム、及びナビゲーション装置 Download PDFInfo
- Publication number
- JP5892425B2 JP5892425B2 JP2012176689A JP2012176689A JP5892425B2 JP 5892425 B2 JP5892425 B2 JP 5892425B2 JP 2012176689 A JP2012176689 A JP 2012176689A JP 2012176689 A JP2012176689 A JP 2012176689A JP 5892425 B2 JP5892425 B2 JP 5892425B2
- Authority
- JP
- Japan
- Prior art keywords
- time
- cost
- road
- link
- traffic
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000001186 cumulative effect Effects 0.000 claims description 12
- 238000012545 processing Methods 0.000 description 20
- 230000006870 function Effects 0.000 description 17
- 238000000034 method Methods 0.000 description 10
- 230000008569 process Effects 0.000 description 8
- 238000001514 detection method Methods 0.000 description 6
- 230000010365 information processing Effects 0.000 description 5
- 230000008859 change Effects 0.000 description 4
- 230000005540 biological transmission Effects 0.000 description 3
- 230000015654 memory Effects 0.000 description 3
- 238000010586 diagram Methods 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 239000000523 sample Substances 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 239000013078 crystal Substances 0.000 description 1
- 238000013480 data collection Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000010355 oscillation Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 230000008054 signal transmission Effects 0.000 description 1
Images




Landscapes
- Instructional Devices (AREA)
- Navigation (AREA)
Description
目的地までの走行経路や、到着予想時刻(走行時間)を案内する場合、出発地から目的地まで走行する複数の経路に対して走行距離や時間をコストとして累計することで累計コストが最小となる走行経路を探索結果とし、また累計コストから走行時間や到着予想時刻を求めている。
この信号コストは、信号機の種別や状態、進行方向、道路の種類、実際の経験値などから決定されているが、従来のコスト計算では、全ての信号機に対して何らかの探索コストを加算するようにしている。
図6に示すように、A地点からB地点までの経路として、途中に3つの信号機S1〜S3がある国道上を走行するルートR1と、信号機S1から信号機S3まで途中に信号機が無い脇道を経由するルートR2があり、各リンク(図では各信号機の間)に対する時間コストと、各信号機S1〜S3に対する時間コストが規定されているものとする。
このような場合の経路探索では、ルートR1の時間コストは330秒(=60+30+60+30+60+30+60)であるのに対し、ルートR2の時間コストは320秒(=60+30+140+30+60)であるため、脇道を経由するルートR2が選択され、走行時間は320秒と予想される。
このため、図6で示した場合のように、実際には停止しない信号機S2に対して信号機コストを加算してしまうため、実際に停止する信号機の数よりも多くの信号機に対して信号機コストを加算してしまっていた。
その結果、信号機の多い国道等の幹線道路は経路として探索されにくくなり、必ずしも最適ではない経路が探索されてしまう可能性があった。
また到着予想時刻(ETA)算出を行う場合にも、正確な時間を算出できていない可能性がある。
(2)請求項2に記載の発明では、前記信号機時間コスト算出手段は、前記道路に対して、所定の起点からの前記リンク時間コストの累計値が前記取得したノンストップ時間T以降で最初の信号機に対して規定されている信号機時間コストを加算する、ことを特徴とする請求項1に記載のコスト算出装置を提供する。
(3)請求項3に記載の発明では、前記所定の起点は、前記ノンストップ時間Tが規定されている幹線道路に進入する交差点、及び、前記信号機時間コストを加算した、前記リンク時間コストの累計値が前記取得したノンストップ時間T以降で最初の信号機の位置である、ことを特徴とする請求項2に記載のコスト算出装置を提供する。
(4)請求項4に記載の発明では、前記ノンストップ時間Tは、センタ装置において、実際に道路を走行した複数の車両から収集した走行データに基づいて各道路毎に規定され、前記信号機時間コスト算出手段は、前記道路に対して規定されているノンストップ時間Tとして、前記センタ装置が規定したノンストップ時間Tを取得する、ことを特徴とする請求項1、請求項2、又は請求項3に記載のコスト算出装置を提供する。
(5)請求項5に記載の発明では、前記ノンストップ時間Tは、前記センタ装置において、前記収集した走行データのうち、道路が空いている時間帯の走行データに基づいて各道路毎に規定されている、ことを特徴とする請求項4に記載のコスト算出装置を提供する。
(6)請求項6に記載の発明では、請求項1から請求項5のうちのいずれか1の請求項に記載したコスト算出装置と、複数の経路を候補経路として前記コスト算出装置で算出した各合計時間コストのうち、合計時間コストの最小値を使用して、案内対象となる走行経路、又は、走行時間を決定する案内対象決定手段と、を具備することを特徴とするナビゲーション装置を提供する。
(7)請求項7に記載の発明では、車両が走行する道路を構成する各リンクに対するリンク時間コストの合計を算出するリンクコスト算出機能と、前記道路上に存在する各信号機に対する信号機時間コストの合計を算出する信号機時間コスト算出機能と、前記算出したリンク時間コストの合計と、前記算出した信号機時間コストの合計とから前記道路の合計時間コストを算出する合計時間コスト算出機能と、前記合計時間コスト算出機能により算出された道路の合計時間コストに基づいて、経路の探索又は該道路の走行に必要な時間の算出を行う探索機能と、渋滞を検出した前記道路を構成する各リンクのリンク時間コストを大きくする渋滞用調整機能と、をコンピュータに実現させるコスト算出プログラムであって、前記リンクコスト算出機能は、渋滞を検出したリンクのリンク時間コストを大きくする渋滞用の調整を行うことで前記リンク時間コストの合計を算出し、前記信号機時間コスト算出機能は、前記道路に対して規定されている、信号機で停止することなく走行可能なノンストップ時間Tを取得し、前記道路に対して、所定の起点から、各リンクに対する前記リンク時間コストの累計値が、前記取得したノンストップ時間Tに至るまでの間に存在する信号機に対する信号機時間コストを下げて適用する、ことを特徴とするコスト算出プログラムを提供する。
(1)実施形態の概要
本実施形態のナビゲーション装置では、特定の道路上を走行する車両が信号機で停止することなく走行を継続することが可能な時間(ノンストップ時間)Tを、地図データと共に保存する。
ノンストップ時間Tは、信号機が赤から青に変わって走行を開始した車両が、当該道路を信号停止することなく継続して走行するまでの時間(次に信号で停止するまでの時間)の平均値で、特定の道路毎に規定されている。
ノンストップ時間Tは、ナビゲーションセンタや情報センタなどにおいて、プローブカーなどから各道路に対する実際の走行情報を収集し、データベース化される。ただし、渋滞中は正確な走行情報が得られないため、渋滞でない時間帯の走行情報を使用したり、収集した走行情報から渋滞でない状況の走行情報を抽出することで、ノンストップ時間Tのデータベース化が行われる。
候補となる走行経路上の特定道路に対してノンストップ時間Tが規定されている場合、当該特定道路上の全ての信号機に対する信号機コストを加算するのではなく、特定道路において区間内連続走行時間Σtがノンストップ時間T以上になるまでの間に存在する信号機については、信号機コストを下げる(本実施形態ではゼロ)ことで、実際の走行に近いコスト計算が可能になる。
区間内連続走行時間Σtは、特定道路に進入後の各リンクに規定されている時間コストtの累計値が使用され、区間内連続走行時間Σtがノンストップ時間T以下であるリンク内、又はリンク端に存在する信号機では、停止する可能性が低いので、当該信号機の信号機コストをゼロにして、コスト計算を行う。
一方、次のリンクに対するリンクコストを加算した区間内連続走行時間Σtがノンストップ時間T以上になった場合、当該リンク内、端に存在する信号機に対しては、規定されている信号機コストを加算する。
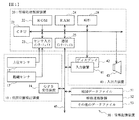
図1は本実施形態にかかるコスト算出装置を適用したナビゲーション装置についての構成図である。
このナビゲーション装置は、ナビゲーション機能を備えた携帯端末や、車両に搭載された車載ナビゲーション装置により実現される。
そして、携帯端末や車載ナビゲーション装置単独で全てのナビゲーション機能を実現する場合と、携帯端末や車載ナビゲーション装置とナビゲーションサーバ(センタ装置等)とがナビゲーション機能を分担する場合とがある。
機能を分担する場合として、例えば、携帯端末や車載ナビゲーション装置が探索に必要な目的等の入力や各種案内機能を分担し、センタ装置が目的地までの経路探索や走行時間算出を分担する。案内に必要な地図データについても、携帯端末や車載ナビゲーション装置とが予め記憶しておく場合、センタ装置から現在位置や探索経路周辺の地図データを受信する場合がある。
ただし、本実施形態におけるノンストップ時間Tのデータベース化については、データの収集が必要であることから、携帯端末やナビゲーション装置ではなく、ナビゲーションサーバが行う。
以下、経路探索を自装置で行う車載ナビゲーション装置を例に本実施形態の説明をする。
現在位置検出装置10は、方位センサ12、距離センサ13、GPS受信装置14を備え、それぞれ以下のように構成されている。
方位センサ12は、基準角度(絶対方位)に対して、相対的に変化した角度を検出する手段であり、本実施形態では、角速度を利用して角度の変化を検出するジャイロセンサを使用している。なお、ハンドルの回転部に取り付けた光学的な回転センサや回転型の抵抗ボリューム或いは車輪部に取り付ける角度センサでもよい。また、方位センサ12として、例えば、磁石に基づいてN方向の検出から、車両がいずれの方向に位置するかを検出する地磁気センサであり、絶対方位を検出する手段であってもよい。
GPS(グローバル・ポジショニング・システム)受信装置14は、人工衛星からの信号を受信する装置であり、信号の発信時刻、受信装置の位置情報、受信装置の移動速度、受信装置の進行方向など様々な情報を得ることができる。
中央処理装置(CPU)21は、ナビゲーション装置全体の総括的な演算及び制御を行う。
ROM22は、目的地までの経路の探索、表示案内や音声案内等のナビゲーションに関するプログラムや、本実施形態による信号機コスト考慮判定処理プログラム等の各種プログラムを格納している。
センサ入力インターフェイス23は、現在位置検出装置10からの情報を受け取る手段である。
RAM24は、本実施形態における信号機コスト考慮判定処理において、経路探索において候補となっている走行経路を構成する各リンクのリンク情報、幹線道路ID、各リンクに対する時間コストの累計値である区間内連続走行時間Σtを記憶する。
幹線道路IDには、判断対象となっている道路がノンストップ時間Tが設定されている道路か否か、及び設定されている場合の幹線道路区間IDが記憶される。
時計28は、例えば、水晶振動子などを用いて構成されており、時刻を刻んだり、発振によってナビゲーション装置の各部の動作タイミングを提供したりする。
その他、CPU21で処理されたベクトル情報を画像情報に処理するための画像処理専用の画像プロセッサ、画像プロセッサで処理された画像情報を格納する画像メモリ、情報記憶装置50から読み込まれた音声情報を処理しスピーカ43に出力する音声処理専用の音声プロセッサを配設するようにしてもよい。
入力装置41は、例えば、タッチパネル、タッチスイッチ、ジョイスティック、キースイッチ等で構成される。入力装置41のユーザ操作により目的地が入力されたり、経路探索処理等の各種処理要求が入力されたりする。
ディスプレイ42には、現在地周辺の地図や、目的地までの走行経路が表示される。
情報記憶装置50は、地図データファイル51、幹線道路情報52、その他のデータファイル53(例えば、走行経路を音声により案内する場合の音声データ等)を格納している。
この情報記憶装置50は、一般的には、光学的記憶媒体であるDVD−ROM、CD−ROMや磁気的記憶媒体であるハードディスクなどで構成されるが、光磁気ディスク、各種半導体メモリなどの各種情報記憶媒体で構成してもよい。
なお、書き換えが必要な情報については、書き換え可能なハードディスク、フラッシュメモリなどで構成し、その他の固定的な情報についてはCD−ROM、DVD−ROMなどのROMを使用するようにしてもよい。
地図データとしては、全国道路地図、各地域の道路地図または住宅地図等が記憶されている。道路地図は、主要幹線道路、高速道路、細街路等の各道路と地上目標物(施設等)から構成される。住宅地図は、地上建造物等の外形を表す図形及び、道路名称等が表示される市街図である。細街路とは、例えば、国道、県道以下の道幅が所定値以下の比較的狭い道路である。
地図データは、車両現在位置やユーザに指定された地点を含む、所定縮尺による一定範囲の地図がディスプレイ42に表示される。この地図上には、車両の現在位置や指定された地点が表示される。
ノード情報は、地図上において経路探索に利用される各ノードの地理座標データ等を表したデータである。
例えば、交差点などの道路の接続点はノードにより表され、接続点の間の道路(即ち道路の内分岐しない領域)はリンクによって表される。
ノード情報は、各交差点に対して常に設定される交差点ノードと共に、各交差点間の特徴的な点(例えば、カーブの開始、中間、終了の各地点や、高度が変化する地点など)に補助的に設定される補助ノードが存在する。
ノード情報には、各ノードに規定された固有のノード番号や、各ノードに繋がる(ノードを端点とする)リンクのリンク番号、交差点ノードの場合には交差点名、などが規定されている。
図2は、リンク情報の内容を表したものである。
リンク情報は、図2に示すように、リンク番号、リンクの時間コストt、退出交差点の信号機有無、退出交差点信号機の停止時間St、幹線道路区間ID(K−ID)、その他のデータが各リンク毎に規定されている。
リンク番号は、各リンクに付された固有の番号である。各リンクの両端のノード情報には当該リンク番号が規定される。
リンクの時間コストtは、各リンクの走行にかかる時間に換算したコストが規定されている。通常リンクの長さや道路の種別などに応じたコストが規定される。
退出交差点の信号機有無は、リンクの退出側の端部に信号機があるか無いかについて規定されている。
退出交差点信号機の停止時間Stは、リンクの退出交差点に信号機がある場合の、当該退出交差点信号機で停止した場合の停止時間が規定されている。この停止時間Stは、信号機コストとして機能し、各信号機が黄色から青に変わるまでの時間が規定されている。なお、各信号機には必ず黄色で停止するとは限らず、赤になって所定時間経過してから停止する場合もあるため、黄色から青までの時間を最大値として、各道路毎に実情にあわせた停止時間Stが規定されている場合もある。
この幹線道路区間IDが規定されていない場合には、ノンストップ時間Tが規定されていない道路についてのリンクであるため、当該リンクの退出交差点に信号機があれば当該信号機の信号機コストが加算されることになる。
一方、幹線道路区間IDが規定されている場合には、当該IDに対応して規定されているノンストップ時間Tが、後述する幹線道路情報52から読み出される。
図3は、幹線道路情報52の内容を表したものである。
幹線道路情報52には、各車両から収集した走行情報を用いて求められた、各幹線道路毎のノンストップ時間Tが規定されている。
この幹線道路情報52は、センタ装置等で作成されたものを取得して、情報記憶装置50に記憶する。
幹線道路情報52は、地図データ51と共に当初から保存される場合と、後日センタ装置等から取得して保存される場合がある。また、地図データ51と同様に、センタ装置等からバージョンアップ版をダウンロードすることで最新のデータに更新される場合がある。
例えば、幹線道路上に新たな信号機が設定されたり、道路幅や車線幅等の道路の状況が変更されたりした場合、変更にあわせて地図データが更新されるが、この地図データの更新とあわせて該当する幹線道路のノンストップ時間Tも必要に応じて変更される。変更された地図データや幹線道路情報については、適宜センタ装置で更新される。
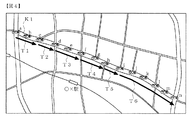
図4に示されるように、ノンストップ時間Tのデータベース化は、連続した信号機の変化タイミングが設定されている道路(前後の信号機と所定のタイミングで連動するように信号機のオフセットがされている道路)が対象となる。具体的には、一般国道、主要地方道(主要な都道府県道及び市道)が対象となり、本実施形態ではこれらの道路を中心とし、信号機のオフセットされている道路を幹線道路という。
センタ装置では、幹線道路K1を走行する各種車両から走行情報を収集する。プローブカー等の各種車両は、GPS受信装置により特定した車両位置(緯度、経度)と車両位置に対応する時刻情報を走行情報として蓄積し、走行をしながらリアルタイムに、又は走行終了後纏めて走行情報をセンタ装置に送信する。
センタ装置では、車両位置からマップマッチングにより走行している道路を特定し、走行情報が幹線道路に対するものであり、且つ、走行時に渋滞が発生していない場合には、取得した走行情報をデータベース化の対象とする。渋滞情報については、座標、時刻、渋滞情報とから判断される。
そして、車両が各信号機で停止しているか否かを走行情報から判定するとともに、停止した信号機間の走行情報から信号機の当該幹線道路K1に対して連続して走行している時間T1、T2、…を求める。
例えば、図4に示すように、幹線道路K1を走行した車両の走行情報から、当該車両が信号機a、c、d、f、h、i、nで停止したと判断し、停止した各信号間を移動する時間T1、T2、…を求める。
そして、センタ装置では、収集した大量の走行情報に基づく時間Tsの平均値から、幹線道路K1に対するノンストップ時間Tを決定する。
この処理は、探索計算やETA算出の際に、各信号機に対して規定されている信号機停止コスト(時間)を考慮するか否かを判定する処理である。
(3)信号機コスト考慮判定処理の概要
ノンストップ時間Tが規定されている幹線道路区間内か否かの判断をし、幹線道路区間外の場合は、従来のコスト処理(例えば、全信号機に対して信号機コストを加算)を行う。
幹線道路区間内であれば、区間内進入の始めの信号機のコストは考慮(=停止と判断して信号機コストを加算)して、区間内連続走行時間Σtをクリアする。以降、次ノードに伸ばしていく(次のリンクについて判断する)。その際、同一の幹線道路区間内で道なり連続走行(区間内走行)であるかを判断し、区間内連続走行時間Σtがノンストップ時間T内であれば、その間の信号機コストを考慮せず(加算せず)に処理する。
区間内連続走行時間Σtがノンストップ時間T以上になった場合、次の信号機に関してはコストを考慮し、区間内連続走行時間Σtをクリアする。
以上の処理を同一の幹線道路区間内であれば処理を繰り返す。一度、幹線道路区間を外れた場合は、始めの状態に戻る。
この信号機コスト考慮判定処理では、経路探索処理やETA算出処理において、候補となっている走行経路に対するコスト計算の際に、経路上に存在する各信号機の信号機コストを考慮する(加算する)か否かを判断するものである。
CPU21は、判断対象としてRAM24に保存されている走行経路について、1リンク分のリンク情報を取得し(ステップ11)、取得したリンク情報に幹線道路区間K−IDが存在するか否かを判断する(ステップ12)。
幹線道路区間K−IDがRAM24の幹線道路IDと同じである場合(ステップ13;Y)、同一の幹線道路上のリンクについての判断であるため、RAM24の設定値はそのままの値を使用し、ステップ17に移行する。
一方、幹線道路区間K−IDがRAM24の幹線道路IDと同じでない場合(ステップ13;N)、CPU21は、RAM24の幹線道路ID記憶エリアに、幹線道路区間K−IDを設定(保存)する(ステップ14)。この、幹線道路IDと同じでない場合としては、新たな幹線道路区間に進入した場合が該当し、最初に幹線道路区間に進入したためにRAM24に幹線道路IDが保存されていない場合を含む。
さらにCPU21は、新たに幹線道路区間に進入したので、RAM24の区間内連続走行時間Σt記憶エリアの値をゼロに設定(リセット)する(ステップ16)。
当該リンク退出ノードに信号機が存在しなければ(ステップ18;N)、CPU21は、信号機が無いため信号機コストについての判定対象外と判断し(ステップ19)、メインルーチンにリターンし、次のリンクについての処理を継続する。
区間内連続走行時間Σtがノンストップ時間Tよりも小さい場合(ステップ20;Y)、当該リンクの退出ノードに存在する信号機で停止する可能性が低いので、CPU21は、信号停止時間は考慮しないこととし(ステップ21)、メインルーチンにリターンして次のリンクについての処理を継続する。
これにより、CPU21は、当該リンク情報で規定されている退出交差点信号機の停止時間(信号機コスト)Stを、当該走行経路のコスト計算の対象外とする。
これにより、CPU21は、当該リンク情報で規定されている退出交差点信号機の信号機コストStを、当該走行経路のコスト計算の対象として、加算する。
なお、ステップ22で区間内連続走行時間Σtをゼロに設定することで、次のリンクから新たにリンクの時間コストtの累計を求めることになる。
そしてCPU21は、RAM24の区間内連続走行時間Σtをゼロに設定し(ステップ22)、当該リンクの退出ノードに信号機があれば、従来と同様に信号機コストStを考慮することとし(ステップ23)、メインルーチンにリターンして次のリンクについての処理を継続する。
そして、リンクコストの合計と信号機コストの合計とから候補となっている走行経路の経路のコストを算出し、算出した各候補に対する経路コストから、探索結果としての走行経路を決定し、また、道路の走行に必要な時間の算出を行う。
これにより、幹線道路について、より実際の走行に合致したコスト算出を行うと共に、適切な走行経路の探索や、移動時間の算出を行うことが可能になる。
そして、渋滞が発生した場合、同一の道路であってもより多くの信号機で停止することになるが、検出した渋滞を考慮した経路探索の場合、一般にリンクの時間コストを大きくすることで渋滞用の調整を行っているので、区間内連続走行時間Σtも大きくなり、同一の区間に対して多くの信号機の信号機コストが加算対象となり、実際の信号機の停止、通過の実情も反映されることになる。
例えば、説明した実施形態では、信号機で停止することなく走行可能な時間(ノンストップ時間T)を物理量として使用する場合について説明したが、他の物理量として信号機で停止することなく走行可能な距離(ノンストップ距離L)や信号機数(ノンストップ信号機数P)を物理量として使用するようにしてもよい。
この場合、ステップ20において、各リンクに対する区間内連続走行時間Σtに代えて、区間内連続走行距離Σlや、区間内連続通過信号数Σpと、ノンストップ距離L、ノンストップ信号機数Pとを比較することになる。
これに対して、考慮しないと判断した信号機コストをゼロとするのではなく、当該信号機に対して規定されている信号機コストStを下げた値を加算するようにしてもよい。この場合、信号機コストStに低下率(例えば、0.1、0.2等)を乗じた信号機コストSt’を加算するようにしてもよい。
14 GPS受信装置
20 情報処理制御装置
21 CPU
40 入出力装置
50 情報記憶装置
51 地図データファイル
52 幹線道路情報
Claims (7)
- 車両が走行する道路を構成する各リンクに対するリンク時間コストの合計を算出するリンクコスト算出手段と、
前記道路上に存在する各信号機に対する信号機時間コストの合計を算出する信号機時間コスト算出手段と、
前記算出したリンク時間コストの合計と、前記算出した信号機時間コストの合計とから前記道路の合計時間コストを算出する合計時間コスト算出手段と、
前記合計時間コスト算出手段により算出された道路の合計時間コストに基づいて、経路の探索又は該道路の走行に必要な時間の算出を行う探索手段と、
渋滞を検出した前記道路を構成する各リンクのリンク時間コストを大きくする渋滞用調整手段と、を備え、
前記信号機時間コスト算出手段は、前記道路に対して規定されている、信号機で停止することなく走行可能なノンストップ時間Tを取得し、前記道路に対して、所定の起点から、各リンクに対する前記リンク時間コストの累計値が、前記取得したノンストップ時間Tに至るまでの間に存在する信号機に対する信号機時間コストを下げて適用する、
ことを特徴とするコスト算出装置。 - 前記信号機時間コスト算出手段は、前記道路に対して、所定の起点からの前記リンク時間コストの累計値が前記取得したノンストップ時間T以降で最初の信号機に対して規定されている信号機時間コストを加算する、
ことを特徴とする請求項1に記載のコスト算出装置。 - 前記所定の起点は、前記ノンストップ時間Tが規定されている幹線道路に進入する交差点、及び、前記信号機時間コストを加算した、前記リンク時間コストの累計値が前記取得したノンストップ時間T以降で最初の信号機の位置である、
ことを特徴とする請求項2に記載のコスト算出装置。 - 前記ノンストップ時間Tは、センタ装置において、実際に道路を走行した複数の車両から収集した走行データに基づいて各道路毎に規定され、
前記信号機時間コスト算出手段は、前記道路に対して規定されているノンストップ時間Tとして、前記センタ装置が規定したノンストップ時間Tを取得する、
ことを特徴とする請求項1、請求項2、又は請求項3に記載のコスト算出装置。 - 前記ノンストップ時間Tは、前記センタ装置において、前記収集した走行データのうち、道路が空いている時間帯の走行データに基づいて各道路毎に規定されている、
ことを特徴とする請求項4に記載のコスト算出装置。 - 請求項1から請求項5のうちのいずれか1の請求項に記載したコスト算出装置と、
複数の経路を候補経路として前記コスト算出装置で算出した各合計時間コストのうち、合計時間コストの最小値を使用して、案内対象となる走行経路、又は、走行時間を決定する案内対象決定手段と、
を具備することを特徴とするナビゲーション装置。 - 車両が走行する道路を構成する各リンクに対するリンク時間コストの合計を算出するリンクコスト算出機能と、
前記道路上に存在する各信号機に対する信号機時間コストの合計を算出する信号機時間コスト算出機能と、
前記算出したリンク時間コストの合計と、前記算出した信号機時間コストの合計とから前記道路の合計時間コストを算出する合計時間コスト算出機能と、
前記合計時間コスト算出機能により算出された道路の合計時間コストに基づいて、経路の探索又は該道路の走行に必要な時間の算出を行う探索機能と、
渋滞を検出した前記道路を構成する各リンクのリンク時間コストを大きくする渋滞用調整機能と、
をコンピュータに実現させるコスト算出プログラムであって、
前記リンクコスト算出機能は、渋滞を検出したリンクのリンク時間コストを大きくする渋滞用の調整を行うことで前記リンク時間コストの合計を算出し、
前記信号機時間コスト算出機能は、前記道路に対して規定されている、信号機で停止することなく走行可能なノンストップ時間Tを取得し、前記道路に対して、所定の起点から、各リンクに対する前記リンク時間コストの累計値が、前記取得したノンストップ時間Tに至るまでの間に存在する信号機に対する信号機時間コストを下げて適用する、
ことを特徴とするコスト算出プログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012176689A JP5892425B2 (ja) | 2012-08-09 | 2012-08-09 | コスト算出装置、コスト算出プログラム、及びナビゲーション装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012176689A JP5892425B2 (ja) | 2012-08-09 | 2012-08-09 | コスト算出装置、コスト算出プログラム、及びナビゲーション装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014035273A JP2014035273A (ja) | 2014-02-24 |
| JP5892425B2 true JP5892425B2 (ja) | 2016-03-23 |
Family
ID=50284325
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012176689A Expired - Fee Related JP5892425B2 (ja) | 2012-08-09 | 2012-08-09 | コスト算出装置、コスト算出プログラム、及びナビゲーション装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5892425B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107144286B (zh) * | 2016-03-01 | 2021-08-24 | 阿里巴巴集团控股有限公司 | 导航方法及装置 |
| CN107146416B (zh) * | 2017-07-18 | 2020-01-21 | 深圳市锦粤达科技有限公司 | 一种智能交通管理系统 |
| JPWO2023095408A1 (ja) * | 2021-11-29 | 2023-06-01 | ||
| CN115973197B (zh) * | 2023-03-21 | 2023-08-11 | 宁波均胜智能汽车技术研究院有限公司 | 一种车道规划方法、装置、电子设备、可读存储介质 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3678639B2 (ja) * | 1999-09-29 | 2005-08-03 | 松下電器産業株式会社 | 経路選出方法およびシステム |
| JP2007248183A (ja) * | 2006-03-15 | 2007-09-27 | Denso Corp | 経路探索装置、ナビゲーション装置および交通情報収集装置 |
| JP4985521B2 (ja) * | 2008-03-28 | 2012-07-25 | アイシン・エィ・ダブリュ株式会社 | 停止履歴データ蓄積システム、蓄積方法および蓄積プログラム |
| JP5125898B2 (ja) * | 2008-09-01 | 2013-01-23 | アイシン・エィ・ダブリュ株式会社 | 走行履歴蓄積システム、方法およびプログラム |
-
2012
- 2012-08-09 JP JP2012176689A patent/JP5892425B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2014035273A (ja) | 2014-02-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8694242B2 (en) | Traveling information creating device, traveling information creating method and program | |
| US8706408B2 (en) | Navigation system and route search method | |
| US7788029B2 (en) | Traveled link identifying systems, methods, and programs | |
| US20110276257A1 (en) | Navigation device, probe information transmission method, computer-readable storage medium that storing probe information transmission program, and traffic information generation device | |
| CN101103250B (zh) | 导航装置 | |
| JP5692628B2 (ja) | ナビゲーション装置、及びナビゲーションプログラム | |
| KR20130133265A (ko) | 내비게이션 방법 및 시스템 | |
| CN104620078A (zh) | 产生替代路线 | |
| JP6055185B2 (ja) | ナビゲーションデバイスの位置を決定すること | |
| JP2019100763A (ja) | すれ違い困難区間回避システム、サーバ装置、情報表示装置およびすれ違い困難区間回避方法 | |
| US7634356B2 (en) | Navigation device | |
| JP2011085431A (ja) | 走行特性データ生成装置,車載装置及び車載情報システム | |
| CN103229022A (zh) | 导航服务器、导航装置及导航系统 | |
| JP5892425B2 (ja) | コスト算出装置、コスト算出プログラム、及びナビゲーション装置 | |
| JP4697167B2 (ja) | 迂回路作成装置及び迂回路作成システム | |
| JP2006098174A (ja) | 経路探索装置 | |
| JP3941605B2 (ja) | カーナビゲーション装置 | |
| JP2009245339A (ja) | 情報作成装置、情報作成方法及びプログラム | |
| JP2011158393A (ja) | ナビゲーション装置および誘導経路探索方法 | |
| JP2008241349A (ja) | 走行時間予測方法、ナビゲーション装置及びプログラム | |
| JP5928893B2 (ja) | 経路探索装置、経路案内装置、経路探索プログラム及び経路案内プログラム | |
| JP2011179933A (ja) | ナビゲーション装置、及びナビゲーション用プログラム | |
| JP3521818B2 (ja) | ナビゲーションシステム | |
| JP2004037301A (ja) | 旅行時間算出装置及びナビゲーションシステム | |
| JPH11287667A (ja) | 車載用ナビゲーション装置および記録媒体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150205 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20151021 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20151109 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151225 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160129 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160211 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5892425 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |