JP5875845B2 - 測距機能付内視鏡 - Google Patents
測距機能付内視鏡 Download PDFInfo
- Publication number
- JP5875845B2 JP5875845B2 JP2011264868A JP2011264868A JP5875845B2 JP 5875845 B2 JP5875845 B2 JP 5875845B2 JP 2011264868 A JP2011264868 A JP 2011264868A JP 2011264868 A JP2011264868 A JP 2011264868A JP 5875845 B2 JP5875845 B2 JP 5875845B2
- Authority
- JP
- Japan
- Prior art keywords
- distance
- light
- unit
- scanning
- endoscope
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images












Description
そして、光源51aから出射した光を光ファイバ51bが対象物(以下、「観察対象」とする。)まで導きながら、ファイバたわみ駆動システム51cが光ファイバ51bからの光を観察対象上で走査する。
そして、観察対象からの反射光を集光器/検出器サブシステム52が検出し、例えば、位相差法や干渉法等を用いることによって、内視鏡先端から観察対象までの距離が測定されるように構成されている。
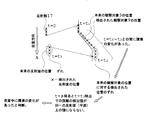
このような工業用内視鏡では、その使用環境によっては、内視鏡挿入部の温度が内視鏡本体部の温度に対して著しく異なる場合がある。例えば、内視鏡本体部は25度程度の自然環境下に配置され、内視鏡挿入部が200度を超える高温環境下に配置された場合である。
このように、内視鏡挿入部が内視鏡本体部に対して著しく高温環境下に晒された場合、内視鏡挿入部を構成する各部材の熱膨張により、内視鏡挿入部がその延在方向に膨張し、挿入部の長さが伸びることに伴い、測距用の信号光光路長が伸びてしまう。これに対して、内視鏡本体部では使用環境の温度変化が僅かであるため、測距用の参照光光路長はほとんど変化しない。
このため、内視鏡先端から観察対象までの実際の距離が同じであっても、内視鏡挿入部が置かれる環境温度が自然環境下における環境温度に対して異なると、内視鏡挿入部内の測距用の信号光光路長が変化してしまい、また、環境温度に応じてその光路長の変化量が変わってくることから、測距結果が異なってしまい、測距精度が低下する虞がある。
また、内視鏡の使用環境に関わらず、内視鏡挿入部先端を湾曲させる場合であっても、その湾曲時に内視鏡挿入部長が伸びることがあり、それに伴い内視鏡挿入部内に配設された測距用の信号光光路長が伸びてしまう虞がある。これに対して、内視鏡本体部内に配設される測距用の参照光光路長に変化はないため、結果的に測距精度が低下してしまう。
このように、内視鏡挿入部内に測距用の信号光光路を配設し、内視鏡本体部内に参照光光路を配設すると、測距精度が低下する虞がある。
また、本発明による測距機能付内視鏡は、内視鏡に備わる照明光源が観察対象に対して照射する観察用照明光とは異なる波長の光を出射する計測用光源と、前記計測用光源からの光の光路を信号光路と参照光路とに分割するとともに、信号光の戻り光と参照光の戻り光とを合成する光路分割部材と、前記参照光路上に設けられたミラーと、前記光路分割部材を介して合成された前記信号光と前記参照光の戻り光を検出する光検出器と、前記光検出器による前記信号光と前記参照光の戻り光の検出に際して得られる所定情報に基づいて、個々の走査範囲における計測対象の距離を検出する距離検出部を有する距離計測手段と、前記信号光路上に設けられていて、前記計測用光源からの前記信号光を前記計測対象に導く信号光導光部と、前記信号光導光部から出射された前記信号光を前記計測対象に対しスポット状に照射するスポット光生成部と、前記スポット状の信号光の射出方向を走査する光走査部と、前記計測対象で反射された前記信号光の戻り光を受光する反射光受光部と、前記反射光受光部が受光した前記信号光の戻り光を前記光路分割部材に導く反射光導光部と、前記信号光導光部の先端近傍における、前記光走査部による走査範囲の一部に設けられた段差面を有する反射部と、を備え、前記距離計測手段は、前記距離検出部が前記光検出器による前記信号光と前記参照光の戻り光の検出に際して得られる所定情報に基づいて検出した、前記段差面における夫々の高さでの前記反射部の距離の検出値を差分して段差を算出し、段差の算出値から予め測定されている前記反射部の段差面の段差の固定値を差分し、その差分値を、前記予め測定されている前記反射部の段差面の段差の固定値で除算して、前記反射部を除く個々の走査範囲における前記計測対象の距離の検出値に対する補正率を算出する補正率算出部と、前記補正率算出部が算出した前記補正率を、前記距離検出部が前記光検出器による前記信号光と前記参照光の戻り光の検出に際して得られる所定情報に基づいて検出した、前記反射部を除く個々の走査範囲における前記計測対象の距離の検出値に乗算し、その乗算値を、前記距離検出部が前記光検出器による前記信号光と前記参照光の戻り光の検出に際して得られる所定情報に基づいて検出した、前記反射部を除く個々の走査範囲における前記計測対象の距離の検出値から差分することで、前記反射部を除く個々の走査範囲における前記計測対象の距離の検出値を補正する、検出距離補正部をさらに有することを特徴としている。
図1は本発明の参考例としての第一実施形態にかかる測距機能付内視鏡システムの全体構成を模式的に示す説明図である。図2は図1に示す測距機能付内視鏡の要部構成を示す説明図で、(a)は光軸に沿う図、(b)は反射部の配置を光軸方向から示す図である。
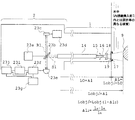
図1の測距機能付内視鏡システムは、内視鏡挿入部1と、内視鏡本体部2と、表示部3と、操作部4を有している。
内視鏡挿入部1は、可撓性のある筒状部材で構成されており、その内部に照明光源11と、撮像光学系12と、撮像部13と、測距用の光ファイバ14を有している。
照明光源11は、観察対象9に対して所定波長の観察光を照射する。撮像光学系12は、観察対象9からの光を結像する。撮像部13は、撮像光学系12からの観察対象9の像を撮像する。
光ファイバ14は、本発明における信号光導光部と反射光導光部を兼ねた構成に相当し、内視鏡挿入部内の全体に亘って配設されている。そして、光ファイバ14は、後述する信号光路S1上(図2参照)に設けられていて、後述する距離計測部23に備わる計測用光源23aからの信号光を計測対象(例えば、観察対象9)に導くとともに、観察対象9で反射された信号光の戻り光を後述する光路分割部材23bに導くように構成されている。
光ファイバ14の先端部近傍には小型のスキャン機構15が接続されている。また、光ファイバ14より射出側には、スポット光学系16が設けられている。スポット光学系16は、本発明におけるスポット光生成部と反射光受光部を兼ねた構成に相当し、光ファイバ14から出射された信号光を観察対象9に対しスポット状(以下、スポット状の信号光を「スポット光」とする。)に照射するとともに、観察対象9で反射された信号光の戻り光が入射するレンズである。スキャン機構15は、本発明における光走査部に相当し、光ファイバ14の先端を動かしてスポット光が観察対象9を含む所定の範囲(走査範囲)内を走査するように構成されている。
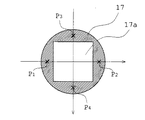
スポット光学系16のレンズ表面上には、反射部17が設けられている(図2参照)。具体的には、反射部17は、レンズ表面における、走査されるスポット光の走査範囲内で、且つ、撮像部13の視野範囲から外れた範囲に設けられている。
照明制御部21は、照明光源11を制御する。映像処理部22は、撮像部13が撮像した観察対象9の画像に対して所定の処理を行う。
なお、後述するが、計測用光源23a、光路分割部材23b、ミラー23d、光検出器23eは、測距用の光学系としての信号光路S1及び参照光路R1の一部を構成する。具体的には、信号光路S1は、出射光光路として計測用光源23aから光路分割部材23b、光ファイバ14を介してスポット光学系16まで、戻り光光路としてスポット光学系16から光ファイバ14、光路分割部材23bを介して光検出器23eまでとなる。また、参照光路R1は、出射光光路として計測用光源23aから光路分割部材23bを介して(反射して)ミラー23cまで、戻り光光路として、ミラー23cから光路分割部材23bを介して(透過して)光検出器23eまでとなる。
光路分割部材23bは、例えば、ハーフミラーで構成されており、計測用光源23aから出射される計測用照明光を信号光と参照光とに分割するとともに、信号光の戻り光と参照光の戻り光とを合成し、光検出器23eに向かわせる。
ミラー23cは、参照光路R1上に設けられている。
光路長調整手段23dは、例えば、ミラー23cを参照光の光軸に沿って移動させる駆動部であって、参照光路R1の光路長を調整することができるように構成されている。また、光路長調整手段23dは、ミラー23cの移動量に基づき参照光路R1の光路長を検出するように構成されている。詳細は後述するが、光路長調整手段23dは、最大強度の干渉光が得られるようにミラー23cの位置を移動させ、且つ、最大強度の干渉光が得られたときのミラー23cの位置に基づいて参照光路R1の光路長を検出する。
光検出器23eは、受光される信号光の戻り光と参照光の戻り光との合成光から干渉光を検出する。
距離検出部23fは、光検出器23eが最大強度の干渉光を検出したときのミラー23cの位置に基づく参照光路R1の光路長を用いて、観察対象9までの実際の距離と、反射部17までの実際の距離をそれぞれ検出する。即ち、出射信号光がスポット光学系16のレンズを透過し、観察対象9で反射された戻り光を受光して得られる観察対象9までの実際の距離と、出射信号光がスポット光学系16のレンズ上に設けられた反射部17で反射され、その戻り光を受光して得られる反射部17までの実際の距離とを検出する。
補正計測値取得部23gは、距離検出部23fでそれぞれ検出された観察対象9までの実際の距離と、反射部17までの実際の距離とに基づいて、内視鏡挿入部先端1aから観察対象9までの補正後の距離を演算し取得する。具体的には、距離検出部23fは、光検出器23eが最大強度の干渉光を検出したときに得られる参照光の光路長を用いて検出した、反射部17を除く個々の走査範囲における観察対象9までの距離から、反射部17までの距離を差分すると共に、その差分値に対して、予め測定されている反射部17から内視鏡先端1aまでの距離(LM:予め図示しないメモリに記憶)を減算することで、内視鏡挿入部先端1aから観察対象9までの距離を求める。
三次元位置算出部25は、映像処理部22、距離計測部23及び光走査制御部24にそれぞれ接続されている。そして、三次元位置算出部25は、距離計測部23から入力される距離情報と、光走査制御部24から入力される走査位置情報と、を関連付けることができるようになっている。そして、三次元位置算出部25は、光走査制御部24から入力される走査位置情報と、距離計測部23から入力される当該走査位置における距離情報とを用いて、個々の走査位置に関する距離、即ち三次元位置情報を求めることができる。そして、その三次元位置情報を走査範囲全体に亘って求めることができる。さらに、算出した三次元位置情報に基づいて、映像処理部22が処理した観察対象9の三次元画像を生成する。
処理制御部26は、三次元位置算出部25と、映像処理部22と、表示部3と、操作部4に接続されている。処理制御部26は、操作部4の操作情報に基づき、三次元位置算出部25が生成した三次元画像、映像処理部22が処理した画像を表示部3に表示させる。
まず始めに、内視鏡の観察環境下の温度が内視鏡本体部2と内視鏡挿入部1とで異ならず、また、内視鏡挿入部1を変形させない状態での測距について説明する。
計測用光源23aから出射された光が光路分割部材23bにて信号光と参照光とに分割される。信号光は信号光路S1を、参照光は参照光路R1を通る。
光路分割部材23bを透過した信号光は、光ファイバ14を通り、スポット光学系16に入射する。このとき、光ファイバ14はスキャン機構15によってその先端が振動させられることで、光ファイバ14を出射する信号光は走査されてスポット光学系16に入射する。
信号光は走査されてスポット光学系16に入射することで、スポット光学系16のレンズ表面に設けられた反射部17にて反射される光と、当該反射部17以外のレンズ表面に入射し、そのレンズ機能によって集光されて観察対象9に向かって進む光とに分割される。
反射部17での反射光(戻り光)は直接光ファイバ14に、また観察対象9での反射光(戻り光)はスポット光学系16を介して光ファイバ14に入射し、光路分割部材23bに入射する。
光路分割部材23bにて反射された参照光は、ミラー23cで反射され、その反射光(戻り光)は再び光路分割部材23bに入射する。
信号光の戻り光は、光路分割部材23bにて反射され、参照光の戻り光は光路分割部材23bを透過し、それぞれの光は共に光検出器23eにて受光される。
なお、信号光の戻り光が光検出器23eにて受光されている間、光路長調整手段23dは、ミラー23cを参照光の光軸方向に沿って移動させている。
そして、距離検出部23fは、光路長調整手段23dによるミラー23cの駆動中に亘って光検出器23eが検出する干渉光強度を検出し、その干渉光強度が最大になったときのミラー23cの位置に基づく参照光路長を光路長調整手段23dから入力する。
具体的には、ΔLは次式で求めることができる。
ΔL=Lobj−L0
そして、内視鏡挿入部先端1aから観察対象9までの距離(Lact)は次式で求めることができる。
Lact=ΔL−ΔM
L0’=L0+Δl
また、このときの光検出器23eから観察対象9までの距離の検出値をLobj’とすると、Lobj’は次式で表される。
Lobj’=Lobj+Δl
ΔL=Lobj’−L0’
=(Lobj+Δl)−(L0+Δl)
=Lobj−L0
となり、内視鏡挿入部1と内視鏡本体部2とで晒される環境温度が変わらない場合と同じになる。つまり、熱膨張によって信号光路S1の光路長が伸張したとしても、求めるΔLにはΔlが重畳されていないため、Δlの影響を受けない測距結果を得ることができる。なお、挿入部1が熱膨張することによって、反射部17から内視鏡先端1aまでの距離LMについても、予め測定していた距離から厳密には変化してしまう。しかしながら、そもそも距離LMはその長さが極めて短いため、熱膨張に伴う距離の変化量は十分に無視できる。
例えば、参照光路R1上のミラー23cを所定量駆動することで、参照光と信号光との間に一定の位相差を与えたときに得られる複数個の干渉画像から位相差を求め、それを信号光の距離に換算する、いわゆる位相シフト方式を用いた構成としてもよい。また、例えば、参照光路の光路長を固定し、周波数シフタを用いて計測用光源23aから出射する光の周波数を時間の経過に応じてシフトさせ、参照光と信号光の戻り光とで発生するビート周波数を検出し、検出したビート周波数から信号光の光路長を検出する、いわゆる周波数差方式を用いた構成としてもよい。その場合、計測用光源23aとしては、例えば、周波数シフタを備えた低コヒーレンス光源、周波数シフト帰還型レーザ、周波数シフタを備えた光コムレーザ等を用いるとよい。
また、スポット光学系16は、本発明のスポット光生成部と反射光受光部を兼ねた構成としたが、スポット光生成部と反射光受光部とを別個に構成してもよい。
図3は本発明の第二実施形態にかかる測距機能付内視鏡の全体構成を模式的に示す説明図である。図4は図3に示す測距機能付内視鏡の要部構成を示す説明図で、(a)はその一例にかかる光軸に沿う図、(b)は(a)の例における反射部の形状及び配置を光軸方向から示す図ある。図5は図4における反射部の配置の変形例を示す説明図で、(a)は第一変形例にかかる光軸に沿う図、(b)は第二変形例にかかる光軸に沿う図、(c)は(b)の例における反射部の形状及び配置を光軸方向から示す図、(d)は第三変形例にかかる光軸に沿う図、(e)は第四変形例にかかる光軸に沿う図である。図6は第二実施形態の測距機能付内視鏡におけるスキャン機構によるタイプの異なる走査方法による走査範囲を示す説明図で、(a)はラスタスキャンの場合の走査範囲を示す図、(b)はらせんスキャンの場合の走査範囲を示す図である。図7は第二実施形態の測距機能付内視鏡における反射部と観察対象との位置関係の一例を示す説明図で、(a)は斜視図、(b)は(a)のα断面図である。図8は第二実施形態の測距機能付内視鏡における反射部と観察対象とが図7(b)に示した位置関係にある例において、スキャン機構により矢印A方向にスキャン中に環境の変化が生じた場合に観察対象を計測したときの距離の検出値の実際の距離とのズレを概念的に示す説明図である。図9は第二実施形態の測距機能付内視鏡における距離計測手順の一例を示すフローチャートである。図10は第二実施形態の測距機能付内視鏡における環境変化監視部が反射部において監視対象とする走査範囲(距離計測部による反射部上の計測点)の一例を概念的に示す説明図である。図11は第二実施形態の測距機能付内視鏡における距離計測部による反射部上の計測点の他の例を概念的に示す説明図である。図12は第二実施形態の測距機能付内視鏡におけるテーブルのデータ構成を図11に対応させて概念的に示す説明図である。図13はスキャン機構により図11に示す方向に走査して観察対象を計測したときの距離検出部による距離の検出値を概念的に示す説明図で、(a)は走査中に環境の変化が生じない場合の反射部上の各測定点における距離の検出値と観察対象の距離の検出値を示すグラフ、(b)は走査中に環境の変化が生じた場合の反射部上の各測定点における距離の検出値と観察対象の距離の検出値を示すグラフ、(c)は新たな距離の検出値を反射部の距離の基準検出値とし、再走査して観察対象を計測したときであって再走査中に環境の変化が生じない場合の反射部上の各測定点における距離の検出値と観察対象の距離の検出値を示すグラフである。なお、第一実施形態と同じ機能を持つ光学部材には同じ符号を付してある。
スポット光走査幅拡大光学系18は、例えば、光ファイバ14側が凹面で観察対象9側が平面の平凹レンズで構成されており、図1に示したスキャン機構15による光ファイバ14の先端部の走査幅が小さい場合にスポット光学系16により生成されるスポット光の走査幅を拡大させる機能を備えている。
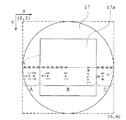
反射部17は、図4(a)、図4(b)に示すように、平凹レンズ18の観察対象9側の平面に設けられていて、スポット光生成部16からのスポット光を、反射部17を除く観察対象9に照射させるための開口領域17aを形成する環状の反射板で構成されている。
カバーガラス19は、内視鏡挿入部先端1a上に配設されている。
なお、反射部17の配置は、図4(a)、図4(b)の例に限定されるものではない。例えば、図5(a)に示すように、スポット光生成部16とスポット光走査幅拡大光学系18の間に独立して配置してもよい。あるいは、図5(b)、図5(c)に示すように、カバーガラス19の内側の面や、図5(d)に示すように、カバーガラス19の外側の面に配置してもよい。
なお、図5(d)の場合、カバーガラス19の外側の面に反射部17を配置していることにより、観察対象9までの距離と反射部17までの距離との差分ΔLを求めるだけで、内視鏡先端から観察対象9までの距離を求めることができる。
また、図5(e)に示すように、内視鏡挿入部先端に光学アダプタ20を装着させる場合には、その光学アダプタ20に反射部17を配置しても良い。
また、スキャン機構15は、ラスタスキャン(図6(a))、らせんスキャン(図6(b))のいずれの走査方法においても開口領域17aを含めて反射部17全体が走査範囲内になるようにスポット光を走査する。
環境変化監視部23hは、反射部17において監視対象となっている少なくとも一部の走査範囲で距離検出部23fが検出した反射部17の距離が監視対象となっている他の走査範囲で距離検出部23fが検出した反射部17の距離と異なるとき、距離検出部23fが検出した全ての走査範囲における観察対象9までの距離を無効とし、スキャン機構15による個々の走査範囲の走査及び距離検出部23fによる個々の走査範囲における観察対象9までの距離の検出のやり直し要求を所定の通知手段(ここでは、処理制御部26や表示部3)を介して通知する。
例えば、図7に示すような観察対象9の距離を計測する場合において、反射部17の形状が、図4、図5に示したように、同一平面上に設けられた既知の形状であってスキャン機構15による個々の走査範囲の走査中に観察環境の変化がない場合、補正計測値取得部23gが反射部17までの距離L0を基準として観察対象9までの距離Lobjとの差分をとることで、個々の走査範囲における反射部17から観察対象9までの距離ΔLを、観察環境の変化に影響されない値として取得することができる。
例えば、図8に示すように、スキャン機構15が反射部17を矢印A方向に走査中に、時刻t=0から時刻t=t1までの間には観察環境に変化がなく、時刻t=t1から時刻t=t2までの間に観察環境に急激な変化があった場合、その間において検出される観察対象9までの距離が本来の観察対象9までの距離からずれたものとなる。このとき、補正計測値取得部23gが時刻t=t0から時刻t=t1までの間の反射部17の反射面の距離と、観察対象9までの距離との差分をとると、個々の走査範囲における反射部17から観察対象9までの距離が、観察環境の変化に影響された値として取得されることになる。
また、時刻t=t3での反射部17の反射面の距離も、本来の反射面の距離からずれたものとなる。
これにより、時刻t=t0から時刻t=t1までの間と、時刻t=t3での反射部17の反射面の距離は、同一平面上の値(即ち、同じ値)ではなくなる。
なお、もちろん、監視対象とする走査範囲(距離計測部による反射部17上の計測点)は、図11に示すように、開口17aを挟んで複数点ずつ設けてもよい。このようにすれば、観察環境の変化をより確実に検知することができ、観察対象9までの距離をより高精度に計測することができる。
具体的には、テーブルには、観察環境の変化のない条件下で、予めスキャン機構15によるタイプの異なる走査方法(図6に示したラスタスキャン、らせんスキャン)ごとに測定された、スキャン機構15による走査開始後の経過時間tに対する個々の走査範囲の位置情報(x座標位置、y座標位置)が格納されている。これら走査開始後の経過時間、走査範囲の位置情報は、不揮発性メモリに固定値として格納される。
これにより、距離計測部23は、反射部17における個々の走査範囲の位置情報を、スキャン機構15による走査開始後の経過時間に応じて、このテーブルを用いて抽出することができるようになっている。
また、テーブルには、走査開始後の経過時間に対応して、スキャン機構15による全ての走査範囲における計測対象(反射部17、観察対象9)までの距離の検出値が格納されるとともに、スキャン機構15による1回の走査に対応して、走査終了後に反射部17における距離の基準検出値が更新可能に格納されるようになっている。これらの距離の検出値及び距離の基準検出値は、揮発性メモリに格納される。
図9に示すように、スキャン機構15が反射部17及び観察対象9を含む全ての計測対象の走査範囲を走査するとともに、距離検出部23fが距離を検出し、その検出値をテーブルに格納する(ステップS1)。
次に、環境変化監視部23hが、テーブルに格納された反射部17において監視対象となっている全ての走査範囲での距離の検出値が同じであるか判別する(ステップS2)。
反射部17において監視対象となっている全ての走査範囲での距離の検出値が同じである場合は、補正計測値取得部23gが、テーブル内に格納されている反射部17の距離の基準検出値に基づいて、個々の走査範囲における観察対象9の補正された距離の計測値を取得する(ステップS5)。なお、補正計測値取得部23gによる距離の計測値の取得に先立ち、環境変化監視部23hが、反射部17において監視対象となっている各走査範囲での距離の検出値が前回の走査終了時点においてテーブル内に格納されている反射部17の距離の基準検出値と同じか否かを判別し(ステップS3)異なる場合は、反射部17において監視対象となっている各走査範囲の距離の検出値を新たな距離の基準検出値としてテーブル内の距離の基準検出値を更新する(ステップS4)。
操作部4によりやり直し要求に応ずる旨の回答情報が入力されたときには、処理制御部26は、光走査制御部24に走査のやり直しを指示する信号を送信する。これにより、ステップS1からやり直しとなる。
操作部4によりやり直し要求に応じない旨の回答情報が入力されたときには、処理制御部26は、表示部3にエラーメッセージを表示させ(ステップS8)、計測対象に対する距離の測定処理を終了させる。
テーブルには図12に示すように、走査開始からの経過時間tに応じて検出対象の距離の検出値dが格納される。環境変化監視部23hは、反射部17の走査範囲に対応する走査時間ti、ti+1、・・・、tk、tk+1、・・・におけるそれぞれの距離の検出値di、di+1、・・・、dk、dk+1、・・・が同じ値であるか判別する(ステップS2)。
これらの検出値が同じあり、且つ、距離の基準検出値dsとも同じである場合は、前回の走査終了時点から今回の走査中において観察環境に変化がない場合であり、反射部17から観察対象9までの距離ΔLは、
ΔL=dj+n−ds
(ここで、dj+nはLobj又はLobj’(=Lobj+Δl)、dsはL0又はL0’(=L0+Δl)に対応する。)
と表すことができる。このときの反射部17上の各測定点における距離の検出値と観察対象9の距離の検出値は図13(a)に示すようになる。
例えば、走査時間t=tj+5での観察対象9の測定点における距離の検出値をdj+5とするとき、そのときの観察対象9と反射部17との距離ΔLj+5は、
ΔLj+5=dj+5−ds
と表すことができる。
ΔLj+5=dj+5−d’s
(ここで、dj+5はLobj又はLobj’(=Lobj+Δl)、d’sはL0+(d’s−ds)又はL0’(=L0+Δl)+(d’s−ds)に対応する。)
となる。すると、dsに加えてd’s−ds分がdj+5から余計に差分され、その分、観察対象9の距離の測定値に誤差が生じ、測定精度が低下してしまう。
ΔLj+5=d’j+5+α−ds
(ここで、d’j+5+αはLobj+(d’s−ds)又はLobj’(=Lobj+Δl)+(d’s−ds)、dsはL0又はL0’(=L0+Δl)に対応する。)
となる。すると、d’s−ds分がd’j+5+αから差分されず、その分、観察対象9の距離の測定値に誤差が生じ、測定精度が低下してしまう。
ΔL=d’j+n−d’s
と表すことができる。
従って、このときの、反射部17の距離の基準検出値d’sをd’s=ds+Δl’(但し、Δl’は走査途中での内視鏡挿入部1の観察環境下での温度変化や変形に伴う変化量)としたとき、観察対象9の測定点j+nにおける距離の検出値d’j+nはd’j+n=dj+n+Δl’とみなすことができる。
そこで、反射部17から観察対象9までの距離は、
d’j+n−d’s=(dj+n+Δl’)−(ds+Δl’)
=dj+n−ds
=(Lobjj+n+Δl)−(L0+Δl)
=Lobjj+n−L0
となり、Δl、Δl’に影響されない値で示すことができる。
例えば、再走査後の走査時間t=tj+5での観察対象9の測定点における距離の検出値はd’j+5となり、そのときの反射部17から観察対象9までの距離ΔLj+5は、
ΔLj+5=d’j+5−d’s
=Lobjj+5−L0
となる。
また、例えば、再走査後の走査時間t=tj+5+αでの観察対象9の測定点における距離の検出値はd’j+5+αとなり、そのときの反射部17から観察対象9までの距離ΔLj+5+αは、
ΔLj+5+α=d’j+5+α−d’s
=Lobjj+5+α−L0
となる。
その他の構成及び作用効果は、第一実施形態の測距機能付内視鏡と略同じである。
図14は本発明の第三実施形態にかかる測距機能付内視鏡の要部構成の一例にかかる光軸に沿う説明図である。図15は図14に示す測距機能付内視鏡における反射部の構成を示す説明図で、(a)は斜視図、(b)は(a)のA−A断面図である。なお、第一実施形態と同じ機能を持つ光学部材には同じ符号を付してある。
また、反射部17は、図15に示すように、段差面17b(α面17b1、β面17b2)を有している。
また、距離計測部23は、図14に示すように、補正率算出部23iと、検出距離補正部23jをさらに有している。
補正率算出部23iは、距離検出部23fが光検出器23eによる信号光と参照光の戻り光の検出に際して得られる所定情報に基づいて検出した、段差面17b(α面17b1、β面17b2)における夫々の高さでの反射部14の距離の検出値を差分して段差を算出し、段差の算出値から予め測定されている反射部17の段差面17b(α面17b1、β面17b2)の段差の固定値を差分し、その差分値を、予め測定されている反射部17の段差面17b(α面17b1、β面17b2)の段差の固定値で除算して、反射部17を除く個々の走査範囲における観察対象9の距離の検出値に対する補正率を算出する。
Δl2=(ls−lm)/lm
ここで、内視鏡挿入部1を変形させない状態での観察対象9の距離の検出値をLobj、媒質の屈折率変化分を補正した観察対象9の距離の検出値をLobj2とすると、
Lobj2=Lobj(1−Δl2)
と表すことができる。
また、ここでの内視鏡挿入部1が変形した状態での媒質の屈折率変化分を補正した観察対象9の距離の検出値をLobj2’、内視鏡挿入部1の変形に伴う信号光の光路長の変化量をΔlとすると、
Lobj2’=Lobj2+Δl
=Lobj(1−Δl2)+Δl
と表すことができる。
L0’=L0+Δl
と表すことができる。
そこで、内視鏡挿入部1が変形した状態での反射部17から媒質の屈折率変化分を補正した観察対象9までの距離は、
Lobj2’−L0’=[Lobj(1−Δl2)+Δl]−(L0+Δl)
=Lobj(1−Δl2)−L0
となり、観察環境下における媒質の屈折率の変化に対応して補正され、且つ、Δlに影響されない値で示すことができる。
補正率の算出を手動で行う場合は、補正率算出部23iによる補正率の算出指示を入力可能な操作画面を例えば表示部3に備え、操作画面において例えば操作部4を介して補正率の算出指示の入力がなされたときに、補正率算出部23iが補正率の算出を行うようにするとよい。
その他の構成及び作用効果は第一実施形態の測距機能付内視鏡と略同じである。
例えば、本実施形態の反射部17が段差面17b(α面17b1、β面17b2)を有する測距機能付内視鏡において、第二実施形態における環境変化監視部23hを備えてもよい。その場合、環境変化監視部23hの監視対象を、反射部17において高さが同一となっている段差面(例えば、α面17b1)に設ければよい。
なお、上記各実施形態では全て内視鏡を例として取り上げたが、本発明は、内視鏡のようには像が見えない、例えば検査プローブに対しても適用が可能である。
また、その検査プローブをチャンネル付内視鏡に組み合わせることで、本願で展開しているような計測内視鏡を実現することも可能である。
1a 内視鏡挿入部先端
2 内視鏡本体部
3 表示部
4 操作部
9 観察対象
11 照明光源
12 撮像光学系
13 撮像部
14 光ファイバ
15 スキャン機構
16 スポット光学系
17 反射部
17a 開口領域
17b 段差面
17b1 α面
17b2 β面
18 スポット光走査幅拡大光学系
19 カバーガラス
20 光学アダプタ
21 照明制御部
22 映像処理部
23 距離計測部
23a 計測用光源
23b 光路分割部材
23c ミラー
23d 光路調整手段
23e 光検出器
23f 距離検出部
23g 補正計測値取得部
23h 環境変化監視部
23i 補正率算出部
23j 検出距離補正部
24 光走査制御部
25 三次元位置算出部
26 処理制御部
51a 光源
51b 光ファイバ
51c ファイバたわみ駆動システム
52 検出器サブシステム
Claims (8)
- 内視鏡に備わる照明光源が観察対象に対して照射する観察用照明光とは異なる波長の光を出射する計測用光源と、前記計測用光源からの光の光路を信号光路と参照光路とに分割するとともに、信号光の戻り光と参照光の戻り光とを合成する光路分割部材と、前記参照光路上に設けられたミラーと、前記光路分割部材を介して合成された前記信号光と前記参照光の戻り光を検出する光検出器と、前記光検出器による前記信号光と前記参照光の戻り光の検出に際して得られる所定情報に基づいて、個々の走査範囲における計測対象の距離を検出する距離検出部を有する距離計測手段と、
前記信号光路上に設けられていて、前記計測用光源からの前記信号光を前記計測対象に導く信号光導光部と、
前記信号光導光部から出射された前記信号光を前記計測対象に対しスポット状に照射するスポット光生成部と、
前記スポット状の信号光の射出方向を走査する光走査部と、
前記計測対象で反射された前記信号光の戻り光を受光する反射光受光部と、
前記反射光受光部が受光した前記信号光の戻り光を前記光路分割部材に導く反射光導光部と、
前記信号光導光部の先端近傍における、前記光走査部による走査範囲の一部に設けられた反射部と、を備え、
前記距離計測手段は、前記反射部において監視対象となっている少なくとも一部の走査範囲で前記距離検出部が検出した前記反射部の距離の検出値が前記監視対象となっている他の走査範囲で前記距離検出部が検出した前記反射部の距離の検出値と異なるとき、前記距離検出部が検出した全ての走査範囲における前記計測対象の距離の検出値を無効とし、前記光走査部による個々の走査範囲の走査及び前記距離検出部による個々の走査範囲における前記計測対象の距離の検出のやり直し要求を所定の通知手段を介して通知する環境変化監視部を有する
ことを特徴とする測距機能付内視鏡。 - 内視鏡に備わる照明光源が観察対象に対して照射する観察用照明光とは異なる波長の光を出射する計測用光源と、前記計測用光源からの光の光路を信号光路と参照光路とに分割するとともに、信号光の戻り光と参照光の戻り光とを合成する光路分割部材と、前記参照光路上に設けられたミラーと、前記光路分割部材を介して合成された前記信号光と前記参照光の戻り光を検出する光検出器と、前記光検出器による前記信号光と前記参照光の戻り光の検出に際して得られる所定情報に基づいて、個々の走査範囲における計測対象の距離を検出する距離検出部を有する距離計測手段と、
前記信号光路上に設けられていて、前記計測用光源からの前記信号光を前記計測対象に導く信号光導光部と、
前記信号光導光部から出射された前記信号光を前記計測対象に対しスポット状に照射するスポット光生成部と、
前記スポット状の信号光の射出方向を走査する光走査部と、
前記計測対象で反射された前記信号光の戻り光を受光する反射光受光部と、
前記反射光受光部が受光した前記信号光の戻り光を前記光路分割部材に導く反射光導光部と、
前記信号光導光部の先端近傍における、前記光走査部による走査範囲の一部に設けられた段差面を有する反射部と、を備え、
前記距離計測手段は、
前記距離検出部が前記光検出器による前記信号光と前記参照光の戻り光の検出に際して得られる所定情報に基づいて検出した、前記段差面における夫々の高さでの前記反射部の距離の検出値を差分して段差を算出し、段差の算出値から予め測定されている前記反射部の段差面の段差の固定値を差分し、その差分値を、前記予め測定されている前記反射部の段差面の段差の固定値で除算して、前記反射部を除く個々の走査範囲における前記計測対象の距離の検出値に対する補正率を算出する補正率算出部と、
前記補正率算出部が算出した前記補正率を、前記距離検出部が前記光検出器による前記信号光と前記参照光の戻り光の検出に際して得られる所定情報に基づいて検出した、前記反射部を除く個々の走査範囲における前記計測対象の距離の検出値に乗算し、その乗算値を、前記距離検出部が前記光検出器による前記信号光と前記参照光の戻り光の検出に際して得られる所定情報に基づいて検出した、前記反射部を除く個々の走査範囲における前記計測対象の距離の検出値から差分することで、前記反射部を除く個々の走査範囲における前記計測対象の距離の検出値を補正する、検出距離補正部をさらに有することを特徴とする測距機能付内視鏡。 - 前記距離計測手段は、前記距離検出部が前記光検出器による前記信号光と前記参照光の戻り光の検出に際して得られる所定情報に基づいて検出した、前記反射部を除く個々の走査範囲における前記計測対象の距離の検出値から前記反射部の距離の検出値を差分し、その差分値に、予め測定されている前記反射部の距離の固定値を加算することで、前記反射部を除く個々の走査範囲における前記計測対象の補正された距離の計測値を取得する、補正計測値取得部を有することを特徴とする請求項1又は2に記載の測距機能付内視鏡。
- 前記反射部が、前記スポット光生成部からのスポット状の前記信号光を、前記反射部を除く前記計測対象に照射させるための開口領域の周囲に設けられていることを特徴とする請求項1〜3のいずれかに記載の測距機能付内視鏡。
- 前記反射部が、同一平面上に設けられていることを特徴とする請求項4に記載の測距機能付内視鏡。
- さらに、予め前記光走査部によるタイプの異なる走査方法ごとに測定された、前記光走査部による走査開始後の経過時間に対する個々の走査範囲の位置情報を格納したテーブルを有し、
前記距離計測手段は、前記反射部における個々の走査範囲の位置情報を、前記光走査部による走査開始後の経過時間に応じて、前記テーブルを用いて抽出することを特徴とする請求項1に記載の測距機能付内視鏡。 - 前記補正率算出部による前記補正率の算出指示を入力可能な操作画面を有し、
前記補正率算出部は、前記操作画面において前記補正率の算出指示の入力がなされたときに、前記補正率の算出を行うことを特徴とする請求項2に記載の測距機能付内視鏡。 - 前記補正率算出部は、前記光走査部による個々の走査範囲の走査及び前記距離検出部による個々の走査範囲における前記計測対象の距離の検出の開始に連動して、前記補正率の算出を行うことを特徴とする請求項2に記載の測距機能付内視鏡。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011264868A JP5875845B2 (ja) | 2011-12-02 | 2011-12-02 | 測距機能付内視鏡 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011264868A JP5875845B2 (ja) | 2011-12-02 | 2011-12-02 | 測距機能付内視鏡 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2013117621A JP2013117621A (ja) | 2013-06-13 |
| JP2013117621A5 JP2013117621A5 (ja) | 2015-01-15 |
| JP5875845B2 true JP5875845B2 (ja) | 2016-03-02 |
Family
ID=48712218
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011264868A Expired - Fee Related JP5875845B2 (ja) | 2011-12-02 | 2011-12-02 | 測距機能付内視鏡 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5875845B2 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015044981A1 (ja) * | 2013-09-27 | 2015-04-02 | テルモ株式会社 | 画像診断装置及びその制御方法 |
| JP6388383B2 (ja) * | 2014-08-04 | 2018-09-12 | 船井電機株式会社 | レーザレンジファインダ |
| US10067222B2 (en) | 2014-08-01 | 2018-09-04 | Funai Electric Co., Ltd. | Laser rangefinder |
| JP2016045107A (ja) * | 2014-08-25 | 2016-04-04 | 新日鐵住金株式会社 | 管の表面までの距離測定装置、及びこれを用いた管の形状測定装置 |
| WO2016063406A1 (ja) * | 2014-10-23 | 2016-04-28 | 並木精密宝石株式会社 | 光イメージング用プローブ |
| WO2017081808A1 (ja) * | 2015-11-13 | 2017-05-18 | 株式会社日立製作所 | 計測方法および装置 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3662336B2 (ja) * | 1996-04-30 | 2005-06-22 | 富士写真フイルム株式会社 | 距離測定可能な内視鏡 |
| US6563105B2 (en) * | 1999-06-08 | 2003-05-13 | University Of Washington | Image acquisition with depth enhancement |
| JP5044126B2 (ja) * | 2006-02-23 | 2012-10-10 | オリンパス株式会社 | 内視鏡観察装置および画像形成を行う内視鏡の作動方法 |
| JP4895277B2 (ja) * | 2006-09-29 | 2012-03-14 | 富士フイルム株式会社 | 光断層画像化装置 |
| JP2009240635A (ja) * | 2008-03-31 | 2009-10-22 | Hoya Corp | ファイバー走査型電子内視鏡装置 |
-
2011
- 2011-12-02 JP JP2011264868A patent/JP5875845B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2013117621A (ja) | 2013-06-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5875845B2 (ja) | 測距機能付内視鏡 | |
| US7408648B2 (en) | Method for tomographically displaying a cavity by optical coherence tomography (OCT) and an OCT device for carrying out the method | |
| CN101617215B (zh) | 用于光学相干断层扫描的系统和方法 | |
| CN101617196B (zh) | 用于光学相干断层扫描的系统和方法以及用于校准这种系统的方法 | |
| US8294901B2 (en) | Optical tomography having path length control based on object position | |
| US9149181B2 (en) | Tomographic imaging apparatus and photographing method | |
| US7324211B2 (en) | Optical tomographic image obtaining apparatus | |
| CN101617217B (zh) | 用于光学相干断层扫描的系统 | |
| US20110222070A1 (en) | Optical Tomographic Image Forming Method | |
| JP2008253492A (ja) | 断層画像処理方法および装置ならびにプログラム | |
| US10352819B2 (en) | Method of measuring transmission characteristics of optical transfer medium and image acquisition device using the same | |
| JP2011089874A (ja) | 距離画像データ取得装置 | |
| JP5486379B2 (ja) | 面形状計測装置 | |
| JP2009156749A (ja) | 光断層画像化方法およびシステム | |
| JP4988305B2 (ja) | 眼科測定装置 | |
| CN101617194A (zh) | 用于光学相干断层摄影的系统和方法 | |
| CN103402422B (zh) | 用于光学相干层析技术的设备和方法 | |
| CN110243282B (zh) | 干涉测量光学装置 | |
| JP2010014514A (ja) | 光断層画像化装置及び光断層画像化装置における干渉信号の処理方法 | |
| US10709329B2 (en) | Image pickup apparatus and method of controlling image pickup apparatus | |
| US20130235385A1 (en) | Surface shape measurement method and measurement apparatus | |
| JP2007082769A (ja) | 試料分析装置 | |
| JP2016186424A (ja) | 情報取得装置及び固定具 | |
| KR101226442B1 (ko) | 고해상도 분광기를 구비한 광 단층촬영 시스템 및 그 방법 | |
| WO2018186153A1 (ja) | 電磁波検出装置、プログラム、および電磁波検出システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141119 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20141119 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150915 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20151027 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151204 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20151204 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160112 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160120 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5875845 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| LAPS | Cancellation because of no payment of annual fees | ||
| R371 | Transfer withdrawn |
Free format text: JAPANESE INTERMEDIATE CODE: R371 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R371 | Transfer withdrawn |
Free format text: JAPANESE INTERMEDIATE CODE: R371 |