JP5867040B2 - 静電アクチュエータ、静電アクチュエータの制御方法、および固定子 - Google Patents
静電アクチュエータ、静電アクチュエータの制御方法、および固定子 Download PDFInfo
- Publication number
- JP5867040B2 JP5867040B2 JP2011270052A JP2011270052A JP5867040B2 JP 5867040 B2 JP5867040 B2 JP 5867040B2 JP 2011270052 A JP2011270052 A JP 2011270052A JP 2011270052 A JP2011270052 A JP 2011270052A JP 5867040 B2 JP5867040 B2 JP 5867040B2
- Authority
- JP
- Japan
- Prior art keywords
- main operation
- detection
- electrode
- linear electrode
- electrostatic actuator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images









Landscapes
- Micromachines (AREA)
Description
固定子と、
前記固定子上に配置された移動子と、
前記固定子に信号を出力して前記移動子の動作を制御する制御装置と、を備え、
前記固定子は、
一面と他面とを有する基板と、
前記基板の一面に各々独立して設けられ、互いに平行に等間隔で配置された複数の主動作用線状電極と、
前記基板の一面に設けられ、前記複数の主動作用線状電極に直交する方向で前記複数の主動作用線状電極に隣接し且つ前記複数の主動作用線状電極に対して平行に配置された検出用線状電極と、
前記基板の一面に設けられ、前記複数の主動作用線状電極との間に前記検出用線状電極が位置するように前記検出用線状電極と平行に配置され且つグランドに電気的に接続されたグランド電極と、を有し、
前記制御装置は、
帯電した前記移動子と前記検出用線状電極との間の距離が変化することによる前記検出用線状電極と前記グランド電極との間の電位差の変化に対応する検出信号に基づいて、前記移動子の位置を検出する
ことを特徴とする静電アクチュエータである。
前記制御装置は、
前記固定子の前記主動作用線状電極に印加する信号が変化しないタイミングにおいて、前記電位差に応じた電位差信号を取得する演算回路を有してもよい。
前記演算回路は、
前記電位差に応じた電位差信号のパターンを認識し、前記電位差信号に含まれるパルス波を除去することにより、前記電位差信号に含まれる前記検出信号を抽出してもよい。
前記制御装置は、
前記電位差信号をアナログ・デジタル変換するアナログ・デジタル変換器をさらに有するようにしてもよい。
前記制御装置は、
前記電位差信号をフィルタリングするローパスフィルタを備えてもよい。
前記制御装置は、
前記検出信号に基づいて、前記移動子が前記検出用線状電極に近接した状態であると判断してもよい。
前記制御装置は、
前記検出信号を連続して複数回検出した場合に、前記移動子が前記検出用線状電極に近接した状態であると判断してもよい。
前記制御装置は、
前記検出信号を検出した場合には、前記移動子の駆動を止める、または、前記移動子を逆方向に駆動させてもよい。
前記制御装置は、
前記検出信号を検出した場合には、前記移動子を所定期間そのまま駆動した後、前記移動子の駆動を止める、または前記移動子を逆方向に駆動させてもよい。
前記検出用線状電極の幅は、前記主動作用線状電極の幅よりも太くてもよい。
前記検出用線状電極の幅は、前記主動作用線状電極の幅の3倍であってもよい。
前記検出用線状電極に接続された配線と前記グランド電極に接続された配線とは、グランドに電気的に接続された2本の保護用グランド配線間に位置していてもよい。
前記複数の主動作用線状電極に含まれる4本の主動作用線状電極のうち、第1番目の主動作用線状電極と第3番目の主動作用線状電極へ、各々位相が反転した矩形波信号が入力され、
第2番目の主動作用線状電極と第4番目の主動作用線状電極へ、各々位相が反転した矩形波信号が入力され、
隣接する2つの電極に入力される2つの信号は、4分の1周期だけずれて同一強度を有してもよい。
固定子と、前記固定子上に配置された移動子と、を備え、前記固定子は、一面と他面とを有する基板と、前記基板の一面に各々独立して設けられ、互いに平行に等間隔で配置された複数の主動作用線状電極と、前記基板の一面に設けられ、前記複数の主動作用線状電極に直交する方向で前記複数の主動作用線状電極に隣接し且つ前記複数の主動作用線状電極に対して平行に配置された検出用線状電極と、前記基板の一面に設けられ、前記複数の主動作用線状電極との間に前記検出用線状電極が位置するように前記検出用線状電極と平行に配置され且つグランドに電気的に接続されたグランド電極と、を有する静電アクチュエータの制御方法であって、
帯電した前記移動子と前記検出用線状電極との間の距離が変化することによる前記検出用線状電極と前記グランド電極との間の電位差の変化に対応する検出信号に基づいて、前記移動子の位置を検出する
ことを特徴とする静電アクチュエータの制御方法である。
一面と他面とを有する基板と、
前記基板の一面に各々独立して設けられ、互いに平行に等間隔で配置された複数の主動作用線状電極と、
前記基板の一面に設けられ、前記複数の主動作用線状電極に直交する方向で前記複数の主動作用線状電極に隣接し且つ前記複数の主動作用線状電極に対して平行に配置された検出用線状電極と、
前記基板の一面に設けられ、前記複数の主動作用線状電極との間に前記検出用線状電極が位置するように前記検出用線状電極と平行に配置され且つグランドに電気的に接続されたグランド電極と、を有する
ことを特徴とする固定子である。
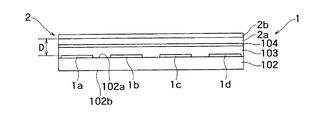
1a 1番目の主動作用線状電極
1b 2番目の主動作用線状電極
1c 3番目の主動作用線状電極
1d 4番目の主動作用線状電極
1s、1sb 1番目の補助動作用線状電極
1t、1tb 2番目の補助動作用線状電極
1u、1ub 3番目の補助動作用線状電極
1v、1vb 4番目の補助動作用線状電極
1b1、1d1、1t1、1u1、1tb1、1ub1 パッド電極
1b2、1d2、1t2、1u2、1tb2、1ub2 スルーホール配線
2 移動子
2a ベースフィルム
2b 抵抗体膜
100 静電アクチュエータ
100a 第1の主動作用入力端子
100b 第2の主動作用入力端子
100c 第3の主動作用入力端子
100d 第4の主動作用入力端子
100s 第1の補助作用入力端子
100t 第2の補助作用入力端子
100u 第3の補助作用入力端子
100v 第4の補助作用入力端子
101a 第1の主動作用バスライン
101b 第2の主動作用バスライン
101c 第3の主動作用バスライン
101d 第4の主動作用バスライン
101s 第1の補助動作用バスライン
101t 第2の補助動作用バスライン
101u 第3の補助動作用バスライン
101v 第4の補助動作用バスライン
102 基板
103 カバーフィルム
104 摺動構造膜
a〜d、s〜v 信号
D1、D2 検出用線状電極
G1、G2 グランド電極
SD1、SD2、SG1、SG2 電圧信号
100D1、100D2、100G1、100G2 電圧信号端子
HD1、HG1、HD2、HG2 配線
CON 制御装置
10 ローパスフィルタ
20 CPU
30 アナログ・デジタル変換器
40 演算回路
D 距離
X 主動作方向
Y、Z 補助動作方向
Claims (15)
- 固定子と、
前記固定子上に配置された移動子と、
前記固定子に信号を出力して前記移動子の動作を制御する制御装置と、を備え、
前記固定子は、
一面と他面とを有する基板と、
前記基板の一面に各々独立して設けられ、互いに平行に等間隔で配置された複数の主動作用線状電極と、
前記基板の一面に設けられ、前記複数の主動作用線状電極に直交する方向で前記複数の主動作用線状電極に隣接し且つ前記複数の主動作用線状電極に対して平行に配置された検出用線状電極と、
前記基板の一面に設けられ、前記複数の主動作用線状電極との間に前記検出用線状電極が位置するように前記検出用線状電極と平行に配置され且つグランドに電気的に接続されたグランド電極と、を有し、
前記制御装置は、
帯電した前記移動子と前記検出用線状電極との間の距離が変化することによる前記検出用線状電極と前記グランド電極との間の電位差の変化に対応する検出信号に基づいて、前記移動子の位置を検出する
ことを特徴とする静電アクチュエータ。 - 前記制御装置は、
前記固定子の前記主動作用線状電極に印加する信号が変化しないタイミングにおいて、前記電位差に応じた電位差信号を取得する演算回路を有する
ことを特徴とする請求項1に記載の静電アクチュエータ。 - 前記演算回路は、
前記電位差に応じた電位差信号のパターンを認識し、前記電位差信号に含まれるパルス波を除去することにより、前記電位差信号に含まれる前記検出信号を抽出する
ことを特徴とする請求項2に記載の静電アクチュエータ。 - 前記制御装置は、
前記電位差信号をアナログ・デジタル変換するアナログ・デジタル変換器をさらに有する
ことを特徴とする請求項2ないし3のいずれか一項に記載の静電アクチュエータ。 - 前記制御装置は、
前記電位差信号をフィルタリングするローパスフィルタを備えることを特徴とする請求項2ないし3のいずれか一項に記載の静電アクチュエータ。 - 前記制御装置は、
前記検出信号に基づいて、前記移動子が前記検出用線状電極に近接した状態であると判断することを特徴とする請求項1ないし5のいずれか一項に記載の静電アクチュエータ。 - 前記制御装置は、
前記検出信号を連続して複数回検出した場合に、前記移動子が前記検出用線状電極に近接した状態であると判断することを特徴とする請求項6に記載の静電アクチュエータ。 - 前記制御装置は、
前記検出信号を検出した場合には、前記移動子の駆動を止める、または、前記移動子を逆方向に駆動させる
ことを特徴とする請求項1ないし7のいずれか一項に記載の静電アクチュエータ。 - 前記制御装置は、
前記検出信号を検出した場合には、前記移動子を所定期間そのまま駆動した後、前記移動子の駆動を止める、または前記移動子を逆方向に駆動させる
ことを特徴とする請求項8に記載の静電アクチュエータ。 - 前記検出用線状電極の幅は、前記主動作用線状電極の幅よりも太いことを特徴とする請求項1ないし9のいずれか一項に記載の静電アクチュエータ。
- 前記検出用線状電極の幅は、前記主動作用線状電極の幅の3倍であることを特徴とする請求項10に記載の静電アクチュエータ。
- 前記検出用線状電極に接続された配線と前記グランド電極に接続された配線とは、グランドに電気的に接続された2本の保護用グランド配線間に位置していることを特徴とする請求項1ないし11のいずれか一項に記載の静電アクチュエータ。
- 前記複数の主動作用線状電極に含まれる4本の主動作用線状電極のうち、第1番目の主動作用線状電極と第3番目の主動作用線状電極へ、各々位相が反転した矩形波信号が入力され、
第2番目の主動作用線状電極と第4番目の主動作用線状電極へ、各々位相が反転した矩形波信号が入力され、
隣接する2つの電極に入力される2つの信号は、4分の1周期だけずれて同一強度を有する
ことを特徴とする請求項1ないし12のいずれか一項に記載の静電アクチュエータ。 - 固定子と、前記固定子上に配置された移動子と、を備え、前記固定子は、一面と他面とを有する基板と、前記基板の一面に各々独立して設けられ、互いに平行に等間隔で配置された複数の主動作用線状電極と、前記基板の一面に設けられ、前記複数の主動作用線状電極に直交する方向で前記複数の主動作用線状電極に隣接し且つ前記複数の主動作用線状電極に対して平行に配置された検出用線状電極と、前記基板の一面に設けられ、前記複数の主動作用線状電極との間に前記検出用線状電極が位置するように前記検出用線状電極と平行に配置され且つグランドに電気的に接続されたグランド電極と、を有する静電アクチュエータの制御方法であって、
帯電した前記移動子と前記検出用線状電極との間の距離が変化することによる前記検出用線状電極と前記グランド電極との間の電位差の変化に対応する検出信号に基づいて、前記移動子の位置を検出する
ことを特徴とする静電アクチュエータの制御方法。 - 一面と他面とを有する基板と、
前記基板の一面に各々独立して設けられ、互いに平行に等間隔で配置された複数の主動作用線状電極と、
前記基板の一面に設けられ、前記複数の主動作用線状電極に直交する方向で前記複数の主動作用線状電極に隣接し且つ前記複数の主動作用線状電極に対して平行に配置された検出用線状電極と、
前記基板の一面に設けられ、前記複数の主動作用線状電極との間に前記検出用線状電極が位置するように前記検出用線状電極と平行に配置され且つグランドに電気的に接続されたグランド電極と、を有する
ことを特徴とする固定子。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011270052A JP5867040B2 (ja) | 2011-12-09 | 2011-12-09 | 静電アクチュエータ、静電アクチュエータの制御方法、および固定子 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011270052A JP5867040B2 (ja) | 2011-12-09 | 2011-12-09 | 静電アクチュエータ、静電アクチュエータの制御方法、および固定子 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013123292A JP2013123292A (ja) | 2013-06-20 |
| JP5867040B2 true JP5867040B2 (ja) | 2016-02-24 |
Family
ID=48774960
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011270052A Expired - Fee Related JP5867040B2 (ja) | 2011-12-09 | 2011-12-09 | 静電アクチュエータ、静電アクチュエータの制御方法、および固定子 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5867040B2 (ja) |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0365084A (ja) * | 1989-08-02 | 1991-03-20 | Hitachi Ltd | 静電型2次元アクチュエータ,光ヘツドおよび光デイスク装置 |
| JPH0591762A (ja) * | 1991-09-24 | 1993-04-09 | Sumitomo Heavy Ind Ltd | 静電アクチユエータの駆動制御装置 |
| JPH0591761A (ja) * | 1991-09-24 | 1993-04-09 | Toshiro Higuchi | 静電アクチユエータ |
| JP3245214B2 (ja) * | 1992-06-02 | 2002-01-07 | キヤノン株式会社 | 振動型アクチュエータ制御装置 |
| JPH07298646A (ja) * | 1994-04-22 | 1995-11-10 | Sekisui Chem Co Ltd | 静電アクチュエータ |
| JP2005304124A (ja) * | 2004-04-07 | 2005-10-27 | Olympus Corp | 静電アクチュエータ及びカメラ |
| JP2005333721A (ja) * | 2004-05-19 | 2005-12-02 | Olympus Corp | 静電アクチュエータ |
| JP2008125229A (ja) * | 2006-11-10 | 2008-05-29 | Olympus Corp | 慣性駆動アクチュエータ |
| JP2010104181A (ja) * | 2008-10-24 | 2010-05-06 | Panasonic Electric Works Co Ltd | 弾性表面波アクチュエータ |
| JP2010115062A (ja) * | 2008-11-07 | 2010-05-20 | Sanyo Electric Co Ltd | 発電装置および電子機器 |
| JP2010286384A (ja) * | 2009-06-12 | 2010-12-24 | Act Lsi:Kk | 静電式近接センサ |
-
2011
- 2011-12-09 JP JP2011270052A patent/JP5867040B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2013123292A (ja) | 2013-06-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2808769B1 (en) | Capacitive touch input device | |
| CN110383221B (zh) | 输入装置和其控制方法 | |
| US10394350B2 (en) | Fabricated electrical circuit on touch sensor substrate | |
| US9182867B2 (en) | Apparatus and method for detecting adjacent object and method of driving electronic device | |
| US20100238121A1 (en) | Transducer | |
| US9231588B2 (en) | Touchscreen routing flow for single layer pattern | |
| JP6154696B2 (ja) | 座標検出装置 | |
| KR20150023303A (ko) | 터치 입력 자극을 결정하기 위한 장치 | |
| US8248382B2 (en) | Input device | |
| US9256339B2 (en) | Tablet having a flexible and transparent sensing area | |
| JP5867040B2 (ja) | 静電アクチュエータ、静電アクチュエータの制御方法、および固定子 | |
| JP4891948B2 (ja) | 入力装置 | |
| TW201610781A (zh) | 單層觸控感測器 | |
| JP5556359B2 (ja) | 4線式静電アクチュエータおよび固定子 | |
| US20140125403A1 (en) | Resistive Interpolation for a Touch Sensor with Opaque Conductive Material | |
| JP2011205786A (ja) | 4線式静電アクチュエータ | |
| WO2016103343A1 (ja) | 座標検出装置 | |
| JP5622082B2 (ja) | 静電アクチュエータ | |
| US20150253893A1 (en) | Variable-Pitch Tracking for Touch Sensors | |
| JP5176524B2 (ja) | 印刷物 | |
| JP6256099B2 (ja) | 静電アクチュエータ | |
| JP5176559B2 (ja) | 印刷物 | |
| KR101509546B1 (ko) | 터치 패널을 이용하는 인접 오브젝트 검출 방법 | |
| JP6341444B2 (ja) | 静電アクチュエータ | |
| KR101460104B1 (ko) | 터치 패널을 포함하는 전자장치 구동방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20141024 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150826 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150925 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151118 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20151208 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20151221 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5867040 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: R3D02 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |