JP5800903B2 - 光学的アセットの識別及び位置追跡 - Google Patents
光学的アセットの識別及び位置追跡 Download PDFInfo
- Publication number
- JP5800903B2 JP5800903B2 JP2013523173A JP2013523173A JP5800903B2 JP 5800903 B2 JP5800903 B2 JP 5800903B2 JP 2013523173 A JP2013523173 A JP 2013523173A JP 2013523173 A JP2013523173 A JP 2013523173A JP 5800903 B2 JP5800903 B2 JP 5800903B2
- Authority
- JP
- Japan
- Prior art keywords
- asset
- assets
- data representing
- circulating
- data
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000003287 optical effect Effects 0.000 title claims description 38
- 238000000034 method Methods 0.000 claims description 54
- 238000012545 processing Methods 0.000 claims description 49
- 238000007726 management method Methods 0.000 claims description 27
- 239000000463 material Substances 0.000 claims description 19
- 230000008439 repair process Effects 0.000 claims description 12
- 238000005516 engineering process Methods 0.000 claims description 10
- 238000012384 transportation and delivery Methods 0.000 claims description 7
- 238000003384 imaging method Methods 0.000 claims description 6
- 239000007787 solid Substances 0.000 claims 1
- 238000004891 communication Methods 0.000 description 19
- 238000012423 maintenance Methods 0.000 description 14
- 230000002085 persistent effect Effects 0.000 description 14
- 238000004519 manufacturing process Methods 0.000 description 11
- 238000010586 diagram Methods 0.000 description 10
- 230000008569 process Effects 0.000 description 8
- 238000012986 modification Methods 0.000 description 4
- 230000004048 modification Effects 0.000 description 4
- 238000004806 packaging method and process Methods 0.000 description 4
- 230000008901 benefit Effects 0.000 description 3
- 125000004122 cyclic group Chemical group 0.000 description 3
- 239000004744 fabric Substances 0.000 description 3
- 230000006870 function Effects 0.000 description 3
- 230000010354 integration Effects 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 2
- 238000013479 data entry Methods 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 230000007613 environmental effect Effects 0.000 description 2
- 238000005530 etching Methods 0.000 description 2
- 238000003032 molecular docking Methods 0.000 description 2
- 238000012015 optical character recognition Methods 0.000 description 2
- 238000012546 transfer Methods 0.000 description 2
- 238000004458 analytical method Methods 0.000 description 1
- 238000013475 authorization Methods 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000004590 computer program Methods 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 230000000977 initiatory effect Effects 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 230000000877 morphologic effect Effects 0.000 description 1
- 230000003134 recirculating effect Effects 0.000 description 1
- 238000010845 search algorithm Methods 0.000 description 1
- 238000013068 supply chain management Methods 0.000 description 1
- 210000003813 thumb Anatomy 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
- 239000002699 waste material Substances 0.000 description 1
Images




Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/08—Logistics, e.g. warehousing, loading or distribution; Inventory or stock management
Landscapes
- Business, Economics & Management (AREA)
- Engineering & Computer Science (AREA)
- Economics (AREA)
- Tourism & Hospitality (AREA)
- General Business, Economics & Management (AREA)
- Human Resources & Organizations (AREA)
- Marketing (AREA)
- Operations Research (AREA)
- Quality & Reliability (AREA)
- Strategic Management (AREA)
- Development Economics (AREA)
- Physics & Mathematics (AREA)
- Entrepreneurship & Innovation (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Image Analysis (AREA)
- Management, Administration, Business Operations System, And Electronic Commerce (AREA)
- Processing Or Creating Images (AREA)
- User Interface Of Digital Computer (AREA)
- Closed-Circuit Television Systems (AREA)
Description
また、本願は以下に記載する態様を含む。
(態様1)
プラットフォームに関連付けられるアセットの管理方法であって、
プラットフォームに関連付けられるアセットの光画像を受け取ることと、
光学的識別プログラムを使用して、前記アセットの光画像を、アセットの画像のライブラリ内のアセットの画像と比較することにより、アセットを識別することと、
識別されたアセットに位置を割り当てることと、
前記アセットの識別と位置とに基づいて、アセットインベントリ及びプラットフォーム構成の一つ以上を含むデータベースを更新することと
を含む方法。
(態様2)
アセットが、同種の複数のアセットのうちの一つであり、前記方法が、同種の複数のアセットのうちの特定のアセットを示す指標を含むデータをユーザインターフェースに入力することにより、アセットを識別することをさらに含む、態様1に記載の方法。
(態様3)
特定のアセットを示す指標の入力が、シリアル番号及び部品番号のうちの少なくとも一つを含む、態様2に記載の方法。
(態様4)
アセットの光画像をアセット画像のライブラリ内のアセットの画像と比較することが、モデルに基づくアルゴリズムを使用してアセットの固有のフィーチャを識別することを含む、態様1に記載の方法。
(態様6)
識別されたアセットに位置を割り当てることが、
アセットの画像を取得した装置内部におけるGPS参照から、識別されたアセットの位置を外挿すること、
アセットの画像を取得したデバイスに関連付けられたユーザインターフェースに位置を手入力すること、及び
固定位置にある撮像デバイスから受け取った画像について、識別されたアセットの位置をデータベースに自動入力すること
のうちの少なくとも一つを含む、態様1に記載の方法。
(態様7)
前記受け取ること、前記比較すること、及び前記割り当てることを、アセットに関連付けられた複数の位置で行うことにより、アセットの正確な位置データを維持する、態様1に記載の方法。
(態様8)
前記複数の位置には、倉庫内の中間地点、アセット修理工場、アセットのサプライビン、及びアセットのペイロード配置プラットフォームのうちの少なくとも一つが含まれる、態様7に記載の方法。
(態様9)
アセットの位置データを使用して、少なくとも一つの交換アセットの発注を開始することをさらに含む、態様1に記載の方法。
(態様10)
アセットの位置データを、位置と位置との間でのアセットの配送に使用される自動化情報技術と相関させることをさらに含む、態様1に記載の方法。
(態様11)
一又は複数のプラットフォームに関連付けられる循環アセットの識別及び位置追跡のためのシステムであって、
循環アセットの光画像を表わすデータを生成する画像取得装置と、
複数の循環アセットの三次元図面を表わすデータを含むデータベースと、
前記循環アセットの光画像を表わすデータを、前記複数の循環アセットのうちの一つの三次元図面を表わすデータと関連付けることにより、画像が取得された循環アセットを識別するようにプログラムされた少なくとも一つの処理装置と
を備えるシステム。
(態様12)
前記少なくとも一つの処理装置が、前記循環アセットの光画像を表わすデータに位置を関連付けるようにプログラムされている、態様11に記載のシステム。
(態様13)
前記画像取得装置及び前記少なくとも一つの処理装置のうちの少なくとも一つが、GPS参照能を有しており、前記少なくとも一つの処理装置がGPS位置を前記循環アセットの光画像を表わすデータに関連付けるようにプログラムされている、態様11に記載のシステム。
(態様14)
前記少なくとも一つの処理装置に通信可能に連結されたユーザインターフェースをさらに備えており、前記システムが、同種の複数のアセットの組について、前記ユーザインターフェースを介して前記同種の複数のアセットの組のうちの特定のアセットを表わす指標を含むデータを入力することができる、態様11に記載のシステム。
(態様15)
循環アセットの光画像を表わすデータに、複数の循環アセットのうちの一つの三次元図面を表わすデータを関連付けるために、前記処理装置が、モデルに基づくアルゴリズムを使用して、循環アセットの光画像を表わすデータ及び複数の循環アセットの三次元図面を表わすデータに含まれる固有のフィーチャを識別するようにプログラムされている、態様11に記載のシステム。
(態様16)
循環アセットの識別方法であって、
アセットの光画像を取得することと、
前記光画像を、取得された光画像を表わすデータとしてコンピュータメモリに格納することと、
光学的認識プログラムを使用して、前記取得された光画像を表わすデータを、アセット画像のライブラリを表わすデータと比較することにより、アセットを識別することと
を含む方法。
(態様17)
前記比較することによりアセット種類が識別され、前記方法は、識別された種類のうちの特定のアセットを表わす指標を含むデータをユーザインターフェースに入力することをさらに含む、態様16に記載の方法。
(態様18)
前記取得された光画像を表わすデータを、アセット画像のライブラリを表わすデータと比較することが、前記取得された光画像を表わすデータを、三次元図面を表わすデータと比較することを含む、態様16に記載の方法。
Claims (9)
- プラットフォームに関連付けられるアセットの管理方法であって、
処理装置が、プラットフォームに関連付けられるアセットの光画像を受け取り、
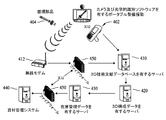
前記処理装置が、光学的識別プログラムを使用して、前記アセットの光画像を、データベース(410、420)が有するアセット画像ライブラリ内のアセットの画像と比較することにより、前記アセットを識別し、
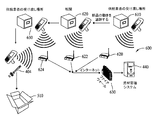
前記処理装置が、前記処理装置内部におけるGPS参照から、前記識別されたアセットの位置を推定することにより、前記識別されたアセットに位置を割り当て、
サーバが、前記処理装置から転送される前記アセットの識別と位置とに基づいて、アセットインベントリ及びプラットフォーム構成の一つ以上を含むデータベース(430、440)を更新することを含む方法。 - 前記アセットが、同種の複数のアセットのうちの一つであり、前記方法が、
ユーザインターフェースが、同種の複数のアセットのうちの特定のアセットを示す指標を含むデータを受け取り、前記特定のアセットを示す指標を含むデータが、シリアル番号及び部品番号のうちの少なくとも一つを含み、
前記処理装置が、モデルに基づくアルゴリズムを使用して前記アセットの固有のフィーチャを識別することをさらに含む、請求項1に記載の方法。 - 前記識別されたアセットに位置を割り当てることが、
固定位置にある撮像デバイスから受け取った画像について、前記識別されたアセットの位置をデータベース(430、440)に自動入力することを含む、請求項1または2に記載の方法。 - 前記処理装置が、前記アセットに関連付けられた複数の位置に配置されることにより、前記アセットの正確な位置データを維持し、
前記複数の位置には、倉庫内の中間地点(502、504)、アセット修理工場、アセットのサプライビン、及びアセットの配置プラットフォームのうちの少なくとも一つが含まれる、請求項1から3の何れか一項に記載の方法。 - 資材管理システムが、アセットの位置データを使用して、少なくとも一つの交換アセットの発注を開始し、
前記処理装置が、アセットの位置データを、位置と位置との間での前記アセットの配送に使用される自動化情報技術と相関させることをさらに含み、
前記処理装置が前記比較することが、アセットの種類の識別を提供し、
前記処理装置が、前記取得された光画像を表わすデータを、アセット画像のライブラリを表わすデータと比較することが、前記取得された光画像を表わすデータを、三次元図面を表わすデータと比較することを含む、請求項1から4のいずれか一項に記載された方法。 - 前記処理装置が、前記アセットの光画像を取得し、
前記処理装置が、前記光画像を、取得された光画像を表わすデータとしてコンピュータメモリに格納することをさらに含み、
前記アセットは、循環アセットである、請求項1から5のいずれか一項に記載された方法。 - 一又は複数のプラットフォームに関連付けられる循環アセットの識別及び位置追跡のためのシステムであって、
循環アセットの光画像を表わすデータを生成する画像取得装置を含む、少なくとも一つの処理装置と、
複数の循環アセットの三次元図面を表わすデータを含むデータベース(410、420)と、を備え、
前記少なくとも一つの処理装置が、循環アセットの光画像を表わす前記データを、前記複数の循環アセットのうちの一つの三次元図面を表わすデータと関連付けることにより、画像が取得された前記循環アセットを識別するようにプログラムされていて、
前記少なくとも一つの処理装置が、GPS参照能を有しており、GPS位置を前記循環アセットの光画像を表わすデータに関連付けるようにプログラムされている、
システム。 - 前記少なくとも一つの処理装置に通信可能に連結されたユーザインターフェースをさらに備えており、前記システムが、同種の複数のアセットの組について、前記ユーザインターフェースを介して前記同種の複数のアセットの組のうちの特定のアセットを表わす指標を含むデータを入力することができる、請求項7に記載のシステム。
- 循環アセットの光画像を表わすデータに、前記複数の循環アセットのうちの一つの三次元図面を表わすデータを関連付けるために、前記処理装置が、モデルに基づくアルゴリズムを使用して、循環アセットの光画像を表わす前記データ及び前記複数の循環アセットの三次元図面を表わす前記データに含まれる固有のフィーチャを識別するようにプログラムされている、請求項7に記載のシステム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US12/851,172 | 2010-08-05 | ||
| US12/851,172 US20120033850A1 (en) | 2010-08-05 | 2010-08-05 | Methods and systems for optical asset recognition and location tracking |
| PCT/US2011/042840 WO2012018470A2 (en) | 2010-08-05 | 2011-07-01 | Methods and systems for optical asset recognition and location tracking |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2013539102A JP2013539102A (ja) | 2013-10-17 |
| JP2013539102A5 JP2013539102A5 (ja) | 2014-07-03 |
| JP5800903B2 true JP5800903B2 (ja) | 2015-10-28 |
Family
ID=44514985
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013523173A Active JP5800903B2 (ja) | 2010-08-05 | 2011-07-01 | 光学的アセットの識別及び位置追跡 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20120033850A1 (ja) |
| EP (1) | EP2601572A4 (ja) |
| JP (1) | JP5800903B2 (ja) |
| CN (1) | CN103080897A (ja) |
| AU (1) | AU2011286387A1 (ja) |
| WO (1) | WO2012018470A2 (ja) |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9171209B2 (en) | 2012-02-23 | 2015-10-27 | Tyco Electronics Uk Infrastructure Limited | Overlay-based asset location and identification system |
| US10440432B2 (en) | 2012-06-12 | 2019-10-08 | Realnetworks, Inc. | Socially annotated presentation systems and methods |
| US20130332972A1 (en) * | 2012-06-12 | 2013-12-12 | Realnetworks, Inc. | Context-aware video platform systems and methods |
| US9218586B2 (en) * | 2012-11-15 | 2015-12-22 | At&T Intellectual Property I, L.P. | Asset management service for distributed computing environments |
| US9129248B2 (en) | 2013-01-25 | 2015-09-08 | Trimble Navigation Limited | Kinematic asset management |
| WO2015171887A1 (en) | 2014-05-07 | 2015-11-12 | Tyco Electronics Corporation | Hands-free asset identification, location and management system |
| JP6577192B2 (ja) * | 2014-05-27 | 2019-09-18 | ザ・ボーイング・カンパニーThe Boeing Company | 流体分配システム組立品を製造する方法 |
| CN104391938B (zh) * | 2014-11-24 | 2017-10-10 | 武汉海川云谷软件技术有限公司 | 一种实物资产管理中的图片批量导入数据库的方法及系统 |
| US9710720B2 (en) * | 2015-04-29 | 2017-07-18 | General Electric Company | System and method of image analysis for automated asset identification |
| US10685335B2 (en) * | 2015-05-15 | 2020-06-16 | Parker-Hannifin Corporation | Integrated asset integrity management system |
| WO2019105739A1 (en) * | 2017-11-28 | 2019-06-06 | Sicpa Holding Sa | System and method of identification and authentication for tracing agricultural assets, identification element for secure identification of agricultural assets and corresponding computer programs |
| US10607406B2 (en) * | 2018-01-25 | 2020-03-31 | General Electric Company | Automated and adaptive three-dimensional robotic site surveying |
| WO2019191708A1 (en) | 2018-03-30 | 2019-10-03 | Realnetworks, Inc. | Socially annotated audiovisual content |
| EP3564846A1 (en) * | 2018-04-30 | 2019-11-06 | Merck Patent GmbH | Methods and systems for automatic object recognition and authentication |
| CN111311643B (zh) * | 2020-03-30 | 2023-03-24 | 西安电子科技大学 | 使用动态搜索的视频目标跟踪方法 |
| CN112150072A (zh) * | 2020-09-27 | 2020-12-29 | 北京海益同展信息科技有限公司 | 基于智能机器人的资产盘点方法、装置、电子设备及介质 |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5323327A (en) * | 1992-05-01 | 1994-06-21 | Storage Technology Corporation | On-the-fly cataloging of library cell contents in an automated robotic tape library |
| US7016532B2 (en) * | 2000-11-06 | 2006-03-21 | Evryx Technologies | Image capture and identification system and process |
| US7439847B2 (en) * | 2002-08-23 | 2008-10-21 | John C. Pederson | Intelligent observation and identification database system |
| WO2003025805A1 (en) * | 2001-09-18 | 2003-03-27 | Pro-Corp Holdings International Limited | Image recognition inventory management system |
| US20030133594A1 (en) * | 2002-01-11 | 2003-07-17 | Sefton Alan K. | Apparatus for method of recording a location of an object having an externally viewable identifier |
| US20030164819A1 (en) * | 2002-03-04 | 2003-09-04 | Alex Waibel | Portable object identification and translation system |
| US7181312B2 (en) * | 2002-04-09 | 2007-02-20 | Paceco Corp. | Method and apparatus for quay container crane-based automated optical container code recognition with positional identification |
| US7225981B2 (en) * | 2004-01-10 | 2007-06-05 | Kenneth Jongebloed, Inc. | Adaptive network-centric online autonomic supply chain management system |
| EP1607716A3 (en) * | 2004-06-18 | 2012-06-20 | Topcon Corporation | Model forming apparatus and method, and photographing apparatus and method |
| US7931197B2 (en) * | 2005-09-20 | 2011-04-26 | Rockwell Automation Technologies, Inc. | RFID-based product manufacturing and lifecycle management |
| US8146812B2 (en) * | 2005-11-01 | 2012-04-03 | Hewlett-Packard Development Company, L.P. | Imaging method and system for tracking devices |
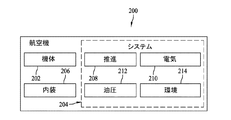
| US8036955B2 (en) * | 2005-11-16 | 2011-10-11 | The Boeing Company | Integrated materials management for commercial aircraft fleets |
| US7805227B2 (en) * | 2005-12-23 | 2010-09-28 | General Electric Company | Apparatus and method for locating assets within a rail yard |
| US7434730B2 (en) * | 2006-02-07 | 2008-10-14 | The Boeing Company | part availability business process |
| WO2007095566A2 (en) * | 2006-02-15 | 2007-08-23 | Porter Gilbert D | Method, apparatus, and system for tracking unique items |
| US8059882B2 (en) * | 2007-07-02 | 2011-11-15 | Honeywell International Inc. | Apparatus and method for capturing information during asset inspections in a processing or other environment |
| JP2009294909A (ja) * | 2008-06-05 | 2009-12-17 | Promise Co Ltd | オンラインショッピングシステム |
| JP2010118019A (ja) * | 2008-11-14 | 2010-05-27 | Sharp Corp | 端末装置、配信装置、端末装置の制御方法、配信装置の制御方法、制御プログラムおよび記録媒体 |
-
2010
- 2010-08-05 US US12/851,172 patent/US20120033850A1/en not_active Abandoned
-
2011
- 2011-07-01 EP EP11733746.9A patent/EP2601572A4/en not_active Ceased
- 2011-07-01 JP JP2013523173A patent/JP5800903B2/ja active Active
- 2011-07-01 WO PCT/US2011/042840 patent/WO2012018470A2/en active Application Filing
- 2011-07-01 AU AU2011286387A patent/AU2011286387A1/en not_active Abandoned
- 2011-07-01 CN CN2011800384839A patent/CN103080897A/zh active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| AU2011286387A1 (en) | 2012-12-06 |
| EP2601572A4 (en) | 2014-05-07 |
| EP2601572A2 (en) | 2013-06-12 |
| JP2013539102A (ja) | 2013-10-17 |
| WO2012018470A2 (en) | 2012-02-09 |
| CN103080897A (zh) | 2013-05-01 |
| US20120033850A1 (en) | 2012-02-09 |
| WO2012018470A3 (en) | 2012-04-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5800903B2 (ja) | 光学的アセットの識別及び位置追跡 | |
| US20170004444A1 (en) | Baggage tracking system | |
| US9275293B2 (en) | Automated object identification and processing based on digital imaging and physical attributes | |
| CN1924914B (zh) | 在联盟组织中的组织之间追踪资产 | |
| US7932826B2 (en) | System for tracking the location of components, assemblies, and subassemblies in an automated diagnostic analyzer | |
| RU2661285C2 (ru) | Управление информацией о компоненте в течение жизненного цикла компонента | |
| US20180322714A1 (en) | Methods, systems, mobile devices and software products for automatic data processing in the maintenance of engine or vehicle systems | |
| CN111598382A (zh) | 基于区块链的业务链数据校核方法、装置、存储介质、电子设备 | |
| US20180144301A1 (en) | Systems and methods to process product return requests | |
| EP3113090A1 (en) | Baggage tracking system | |
| US9754235B1 (en) | System and method for authoritative item identification based on facility operations | |
| McCathie | The advantages and disadvantages of barcodes and radio frequency identification in supply chain management | |
| JP2010528371A (ja) | 情報技術資産のrfidでの発見、追跡およびプロビジョニング | |
| CN113807651A (zh) | 基于大数据的构件全过程管理系统、终端设备及管理方法 | |
| KR101582530B1 (ko) | 자동차 재사용부품 통합관리방법 | |
| Denkena et al. | Interpretation and optimization of material flow via system behavior reconstruction | |
| Chen et al. | Rfid-based bonded warehouse for science park | |
| EP2345941A1 (en) | System and method for a plant for working natural stones | |
| Ivantysynova | RFID in Manufacturing | |
| KR20150078830A (ko) | 바코드와 스마트폰을 활용한 선박수리 요소 통합 관리 시스템 및 그 방법 | |
| Satoglu et al. | Value of rfid enhanced maintenance in aerospace industry | |
| Jose et al. | Real time asset tracking in field services using barcode system: a case study | |
| Housseman et al. | Impacts of radio-identification on cryo-conservation centers | |
| Chen et al. | The prototype and application of RFID implementation: A case study of automobiles assembly industries. | |
| JP6659927B2 (ja) | 情報把握管理装置、情報把握管理装置の端末機および情報把握管理装置のプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140513 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140513 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150311 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150317 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150616 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150804 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150825 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5800903 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |