JP5800763B2 - 交流回転機の制御装置 - Google Patents
交流回転機の制御装置 Download PDFInfo
- Publication number
- JP5800763B2 JP5800763B2 JP2012131997A JP2012131997A JP5800763B2 JP 5800763 B2 JP5800763 B2 JP 5800763B2 JP 2012131997 A JP2012131997 A JP 2012131997A JP 2012131997 A JP2012131997 A JP 2012131997A JP 5800763 B2 JP5800763 B2 JP 5800763B2
- Authority
- JP
- Japan
- Prior art keywords
- current
- estimated
- rotating machine
- speed
- output
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Landscapes
- Control Of Ac Motors In General (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
Description
しかしながら、位置センサや速度センサなどが故障した場合、それらのセンサから出力される情報が無くなったり誤差が生じたりするため、それらのセンサから出力される情報をそのまま利用して交流回転機をベクトル制御することが困難になる。
この場合、回転子に永久磁石を用いた交流回転機では、交流回転機を制動させる方法として、交流回転機の各相を短絡させることで、回転子の永久磁石による誘起電圧によって交流回転機内部を還流する電流により制動トルクを得るダイナミックブレーキがある。しかし、ダイナミックブレーキは、ベクトル制御を用いたときの制動トルクよりも小さく、また、ダイナミックブレーキの制動トルクは誘起電圧の大きさに依存するため、誘起電圧が小さくなる低速域では、特にダイナミックブレーキの制動トルクが更に小さくなる。
検出位置または推定位置に基づき演算された交流回転機の回転速度が、推定手段により所望の推定精度が得られる速度以上の範囲で設定された所定設定速度以上であり、かつ、検出位置と推定位置との偏差である位置偏差が所定の位相差閾値以上のとき位置検出手段が異常と判定して異常検知信号を出力する異常検知手段を備え、
推定手段は、異常検知信号が出力された後は、異常検知信号が出力される直前の位置偏差を位置偏差記憶値として記憶し、位置偏差記憶値と検出位置と電圧指令と回転機電流とに基づき推定位置を出力するものとし、
制御手段は、異常検知信号が出力される前は、指令値と回転機電流と検出位置とに基づき、異常検知信号が出力された後は、指令値と回転機電流と推定位置とに基づき電圧指令を出力するものである。
図1は、本発明の実施の形態1による交流回転機の制御装置の全体の構成を示す図である。先ず、本実施の形態1の全体構成と動作について説明する。図1の交流回転機1は、回転子に永久磁石を有する3相の永久磁石同期電動機である。電流検出手段2は、交流回転機1のU相、V相、W相に流れる回転機電流を検出するものであり、本実施の形態1の電流検出手段2は、U相回転機電流iuとW相回転機電流iwとの2相を検出し出力するが、他の2相や3相すべてを検出し出力するものでも構わない。
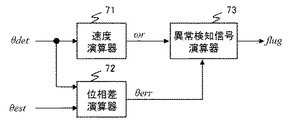
図2は、図1の異常検知手段7の内部構成図である。速度演算器71は、位置検出手段3の出力である検出位置θdetから交流回転機1の回転速度ωrを演算し出力する。速度演算器71は、検出位置θdetから回転速度ωrを演算する方法ならどのような方法のものでも構わないが、例えば、任意の時間ΔTの間の検出位置θdetの変化量Δθdetより(1)式のように求める。
異常でない時は、flug=0として故障検知信号を出力しない。
なお、ここで判定に使用する回転速度ωrは、後述の推定位置θestを基に、(1)式と同様の演算式により求めるようにしてもよい。
図3は、図1の推定手段4の内部構成図である。位置偏差記憶器41は、検出位置θdetと推定位置θestと信号flugとより(4)式のように位置偏差記憶値θmemを演算し出力するものである。

flug=1となった場合は、flug=1となる1演算周期前の値、即ち、異常検知信号が出力される直前の値を、記憶保持するように動作する。従って、位置偏差記憶器41から出力するθmemは、異常検知信号が出力された後は、固定値となる。
図4(b)は、Δθest≠0の場合である。この場合、交流回転機1の回転子磁束φfをd軸に射影したものがφdrL、q軸に射影したものがφqrLとなる。以上のように、検出磁束φdrL、φqrLを演算することで、回転座標d−q軸上からみた、交流回転機1の実際の回転子磁束を演算する。
加減算器46は、検出磁束演算器44の出力である検出磁束φdrL、φqrLから適応状態観測器48の出力である推定磁束φdr0、φqr0を減算したd軸磁束誤差eφdr、q軸磁束誤差eφqrを出力する。乗算器47は、d、q軸磁束誤差eφdr、eφqrに信号flugを乗算することで、d、q軸磁束誤差eφdr、eφqrを有効、無効にするものであり、flug=1となる異常時のみd、q軸磁束誤差eφdr、eφqrが有効となるようにしている。
なお、この種の演算を行う適応状態観測器は、例えば、特許第4672236号で公知であるので、以下の説明では、公知の部分については、適宜この公知文献を引用して具体的な説明は省略し、本願で創案した部分を中心に詳細に説明するものとする。
ゲイン行列演算器483は、後述する積分器485の出力であるd、q軸推定電機子反作用φds0、φqs0とd、q軸推定磁束φdr0、φqr0とのベクトル(φds0,φqs0,φdr0,φqr0)Tに(10)式中のゲイン行列A0を乗算して出力するものであり、(6)式の右辺第1項部分に相当する。
積分器485は、加減算器484の出力4つをそれぞれ積分してd、q軸推定電機子反作用φds0、φqs0とd、q軸推定磁束φdr0、φqr0とのベクトル(φds0,φqs0,φdr0,φqr0)を出力する。ゲイン行列演算器486は、積分器485の出力に(10)式中のゲイン行列C1を乗算することでd、q軸推定電流ids0、iqs0を出力するものであり、(7)式の左部分に相当する。
速度推定器488は、(8)式のように、d、q軸電流偏差eids、eiqsとd、q軸推定磁束φdr0、φqr0とを用いて推定速度ωr0を求める。(8)式中のkpは比例ゲイン、kiは積分ゲインであり任意の値に設定出来る。
積分器489は、(9)式のように推定速度ωr0を積分することで推定位置θestを出力するものである。
本発明の適応状態観測器48は、交流回転機1の数式モデルである(10)式のゲイン行列A0を用いてd−q軸上の推定電機子反作用と推定磁束を求めるものである。同様に、d−q軸上の推定電機子反作用と推定磁束を求める適応状態観測器は特許第4672236号に示されているが、前述したように本発明は、d、q軸磁束誤差eφdr、eφqrを用いていることが異なる。
このように、推定手段4は、異常検知手段7が異常を検出して異常検知信号が出力され、flug=1となった場合、flug=1となる直前である1演算周期前の推定位置θestと検出位置θdetとの偏差を位置偏差記憶値θmemとして記憶し、記憶した位置偏差記憶値θmemと現在の検出位置θdetとに基づいてd、q軸検出磁束φdrL、φqrLを演算し、演算したd、q軸検出磁束φdrL、φqrLと適応状態観測器48で演算するd、q軸推定磁束φdr0、φqr0との偏差であるd、q軸磁束誤差eφdr、eφqrを増幅した増幅信号e3、e4を用いて、適応状態観測器48で推定位置θestを演算し出力するようにすることで、適応状態観測器48は、停止や低速域でも良好に位置推定出来るようにしている。
先の実施の形態1の推定手段4は、異常検知手段7が異常を検知して異常検知信号が出力され信号flug=1となった直前の位置偏差記憶値θmemを記憶し、flug=1となった直後からは、d、q軸磁束誤差eφdr、eφqrを適応状態観測器48で利用するような構成にしていた。しかしながら、flug=1となった直後の交流回転機1の速度が比較的大きい場合は、d、q軸磁束誤差eφdr、eφqrを適応状態観測器48で利用しなくても必要な推定精度が得られるため、d、q軸磁束誤差eφdr、eφqrを適応状態観測器48で利用しなくてもよい。また、異常検知手段7が異常を検知した後に、検出位置θdetと推定位置θestとの位置偏差が変化する場合は、実施の形態1のように、位置偏差記憶値θmemを記憶してしまうと、位置偏差記憶値θmemを利用して演算するd、q軸磁束誤差eφdr、eφqrに余分な誤差成分が発生するため、適応状態観測器48が良好に位置推定出来なくなる場合がある。
乗算器470は、加減算器46の出力であるd、q軸磁束誤差eφdr、eφqrと乗算器412の出力である信号sgとを乗算することで、d、q軸磁束誤差eφdr、eφqrを有効、無効にするものであり、信号sg=1となるとき、即ち、位置検出手段3が異常であり、かつ、交流回転機1の速度が、適応状態観測器48がd、q軸磁束誤差eφdr、eφqrを使わないと必要な推定精度が得られない速度であるときのみd、q軸磁束誤差eφdr、eφqrが有効となるようにしている。
先の実施の形態2では、推定手段400の低速判別器411が推定速度ωr0を使って、d、q軸磁束誤差eφdr、eφqrを利用しなくても適応状態観測器48が必要な精度で位置推定出来る速度であるかそうでないかを判別して信号swlを出力しているが、本実施の形態3では、低速判別器が回転速度ωrを用いて低速判別信号を出力するようにする。
速度演算器421は、速度演算器71と同様に(1)式などのようにして検出位置θdetから回転速度ωrを演算して出力する。
低速判別器422は、(13)式のように、速度演算器421が出力する回転速度の絶対値|ωr|が、所定の速度ωlim以下となったら低速判別信号を出力し信号swL=1とする。回転速度の絶対値|ωr|が、所定の速度ωlimより大きいときは、信号swL=0として低速判別信号を出力しない。
4,400,401 推定手段、41,410 位置偏差記憶器、
42,43,45,46 加減算器、44 検出磁束演算器、
47,412,470 乗算器、411,422 低速判別器、421 速度演算器、
48 適応状態観測器、481,482,483,486,487 ゲイン行列演算器、484 加減算器、485,489 積分器、488 速度推定器、5 制御手段、
51,53 加減算器、52 速度制御器、54 電流制御器、55 座標変換器A、
56 座標変換器B、57,59 選択器、58 速度演算器、6 電圧印加手段、
7 異常検知手段、71 速度演算器、72 位相差演算器、
73 異常検知信号演算器。
Claims (4)
- 交流回転機に流れる回転機電流を検出する電流検出手段、前記交流回転機の回転子位置を検出し検出位置として出力する位置検出手段、電圧指令と前記回転機電流とに基づき前記交流回転機の回転子位置を推定し推定位置として出力する推定手段、指令値と前記回転機電流と前記推定位置または前記検出位置とに基づき前記電圧指令を出力する制御手段、および前記電圧指令に基づいて前記交流回転機に電圧を印加する電圧印加手段を備えた交流回転機の制御装置において、
前記検出位置または前記推定位置に基づき演算された前記交流回転機の回転速度が、前記推定手段により所望の推定精度が得られる速度以上の範囲で設定された所定設定速度以上であり、かつ、前記検出位置と前記推定位置との偏差である位置偏差が所定の位相差閾値以上のとき前記位置検出手段が異常と判定して異常検知信号を出力する異常検知手段を備え、
前記推定手段は、前記異常検知信号が出力された後は、前記異常検知信号が出力される直前の前記位置偏差を位置偏差記憶値として記憶し、前記位置偏差記憶値と前記検出位置と前記電圧指令と前記回転機電流とに基づき前記推定位置を出力するものとし、
前記制御手段は、前記異常検知信号が出力される前は、前記指令値と前記回転機電流と前記検出位置とに基づき、前記異常検知信号が出力された後は、前記指令値と前記回転機電流と前記推定位置とに基づき前記電圧指令を出力することを特徴とする交流回転機の制御装置。 - 前記推定手段は、前記位置偏差を入力し、前記異常検知信号が出力される前は、前記位置偏差を出力し、前記異常検知信号が出力された後は、前記位置偏差記憶値を出力する位置偏差記憶器、この位置偏差記憶器の出力と前記検出位置との加算値から前記推定位置を減算して得られる推定位置誤差に基づき検出磁束を演算する検出磁束演算器、および前記異常検知信号が出力される前は、前記回転機電流と推定電流との偏差である電流誤差と前記電圧指令とに基づき前記推定位置と前記推定電流と推定磁束と推定速度とを演算し、前記異常検知信号が出力された後は、前記回転機電流と前記推定電流との偏差である前記電流誤差と前記検出磁束と推定磁束との偏差である磁束誤差と前記電圧指令とに基づき前記推定位置と前記推定電流と前記推定磁束と前記推定速度とを演算する適応状態観測器を備えたことを特徴とする請求項1記載の交流回転機の制御装置。
- 前記検出位置または前記推定位置に基づき演算された前記交流回転機の回転速度が、前記推定手段の前記適応状態観測器により前記推定位置を前記電流誤差と前記磁束誤差と前記電圧指令とに基づき演算しないと必要な推定精度が得られない速度以下になったとき低速判別信号を出力する低速判別器を備え、
前記位置偏差記憶器は、前記位置偏差を入力し、前記異常検知信号と前記低速判別信号とが共に出力される前は、前記位置偏差を出力し、前記異常検知信号と前記低速判別信号とが共に出力された後は、前記異常検知信号と前記低速判別信号が共に出力される直前の前記位置偏差を位置偏差記憶値として記憶して出力するものであり、前記適応状態観測器は、前記異常検知信号と前記低速判別信号とが共に出力される前は、前記回転機電流と推定電流との偏差である電流誤差と前記電圧指令とに基づき前記推定位置と前記推定電流と前記推定磁束と前記推定速度とを演算し、前記異常検知信号と前記低速判別信号とが共に出力された後は、前記回転機電流と前記推定電流との偏差である前記電流誤差と前記検出磁束と前記推定磁束との偏差である前記磁束誤差と前記電圧指令とに基づき前記推定位置と前記推定電流と前記推定磁束と前記推定速度とを演算するものとしたことを特徴とする請求項2記載の交流回転機の制御装置。 - 前記指令値は速度指令値であり、
前記電圧印加手段は、前記電圧指令としての3相電圧指令に基づいて前記交流回転機に電圧を印加するものであり、
前記制御手段は、速度制御器と電流制御器と座標変換器Aと座標変換器Bとを備え、
前記異常検知信号が出力される前は、前記速度制御器は、前記検出位置に基づき演算された回転速度が前記速度指令値に追従するように回転二軸座標のd−q軸上の電流指令を出力し、前記座標変換器Bは、前記検出位置に基づき前記回転機電流を前記d−q軸上の電流に変換して出力し、前記電流制御器は、前記d−q軸上の電流が前記d−q軸上の電流指令に追従するように前記d−q軸上の電圧指令を出力し、前記座標変換器Aは、前記検出位置に基づき前記d−q軸上の電圧指令を前記3相電圧指令に変換して前記電圧印加手段に出力し、
前記異常検知信号が出力された後は、前記速度制御器は、前記推定位置に基づき演算された推定速度が前記速度指令値に追従するように回転二軸座標のd−q軸上の電流指令を出力し、前記座標変換器Bは、前記推定位置に基づき前記回転機電流を前記d−q軸上の電流に変換して出力し、前記電流制御器は、前記d−q軸上の電流が前記d−q軸上の電流指令に追従するように前記d−q軸上の電圧指令を出力し、前記座標変換器Aは、前記推定位置に基づき前記d−q軸上の電圧指令を前記3相電圧指令に変換して前記電圧印加手段に出力することを特徴とする請求項1ないし3のいずれか1項に記載の交流回転機の制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012131997A JP5800763B2 (ja) | 2012-06-11 | 2012-06-11 | 交流回転機の制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012131997A JP5800763B2 (ja) | 2012-06-11 | 2012-06-11 | 交流回転機の制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013258810A JP2013258810A (ja) | 2013-12-26 |
| JP5800763B2 true JP5800763B2 (ja) | 2015-10-28 |
Family
ID=49954770
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012131997A Active JP5800763B2 (ja) | 2012-06-11 | 2012-06-11 | 交流回転機の制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5800763B2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6377985B2 (ja) * | 2014-07-24 | 2018-08-22 | ファナック株式会社 | 停電時におけるトルク指令制限機能を備えたモータ制御装置 |
| KR101592121B1 (ko) | 2014-10-29 | 2016-02-05 | 쌍용자동차 주식회사 | 자동차용 그로멧 |
| JP6068554B2 (ja) | 2015-05-11 | 2017-01-25 | ファナック株式会社 | センサレスで制御停止を行う機能を有するサーボ制御装置 |
| JP6572843B2 (ja) * | 2016-07-26 | 2019-09-11 | 東芝三菱電機産業システム株式会社 | 電動機の制御装置 |
| JP6932063B2 (ja) * | 2017-10-31 | 2021-09-08 | 日立Astemo株式会社 | モータ制御装置、並びにブレーキ制御装置 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000152687A (ja) * | 1998-11-05 | 2000-05-30 | Daikin Ind Ltd | ブラシレスdcモータ制御方法およびその装置 |
| JP2001112282A (ja) * | 1999-10-01 | 2001-04-20 | Matsushita Electric Ind Co Ltd | モータ制御装置 |
| WO2002091558A1 (fr) * | 2001-04-24 | 2002-11-14 | Mitsubishi Denki Kabushiki Kaisha | Systeme de controle d'un moteur synchronise |
| US6906491B2 (en) * | 2003-06-20 | 2005-06-14 | Rockwell Automation Technologies, Inc. | Motor control equipment |
| JP4488708B2 (ja) * | 2003-09-26 | 2010-06-23 | 株式会社東芝 | 回転機制御装置および洗濯機 |
| JP2006158046A (ja) * | 2004-11-26 | 2006-06-15 | Yaskawa Electric Corp | 交流電動機のセンサレス制御方法および装置 |
| JP5252190B2 (ja) * | 2008-07-23 | 2013-07-31 | 株式会社ジェイテクト | モータ制御装置 |
-
2012
- 2012-06-11 JP JP2012131997A patent/JP5800763B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2013258810A (ja) | 2013-12-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5130031B2 (ja) | 永久磁石モータの位置センサレス制御装置 | |
| JP5291184B2 (ja) | 交流回転機の制御装置 | |
| KR102108911B1 (ko) | 드라이브 시스템 및 인버터 장치 | |
| JP4677852B2 (ja) | 永久磁石同期モータのベクトル制御装置 | |
| US10411633B2 (en) | Control device for AC rotating machine | |
| JP5800763B2 (ja) | 交流回転機の制御装置 | |
| KR20130086730A (ko) | 전동기의 센서리스 제어 장치 및 방법 | |
| JP2014225993A (ja) | 同期機制御装置 | |
| JP4771998B2 (ja) | 電動機の駆動装置 | |
| JP2010200430A (ja) | 電動機の駆動制御装置 | |
| JP4010195B2 (ja) | 永久磁石式同期モータの制御装置 | |
| JP5745105B2 (ja) | 交流回転機の制御装置 | |
| JP2012222959A (ja) | 同期機制御装置 | |
| JP7151872B2 (ja) | 永久磁石同期機の制御装置 | |
| JP2010041868A (ja) | 同期電動機のロータ回転監視装置および制御システム | |
| JP5731355B2 (ja) | 車両駆動用誘導電動機の制御装置 | |
| JP4735439B2 (ja) | 永久磁石式同期電動機の初期磁極位置推定装置 | |
| JP6099488B2 (ja) | 交流回転機の制御装置 | |
| JP6541092B2 (ja) | 永久磁石同期電動機の制御装置 | |
| JP5726273B2 (ja) | 永久磁石状態推定機能を備えた同期機制御装置およびその方法 | |
| JP5534991B2 (ja) | 同期電動機の制御装置 | |
| JP5533381B2 (ja) | 交流回転機の制御装置 | |
| JP3692929B2 (ja) | モータ制御装置 | |
| JP6104021B2 (ja) | 交流回転機の制御装置 | |
| JP2013042631A (ja) | 永久磁石同期モータの制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20141007 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150715 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150728 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150825 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5800763 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |