JP5797573B2 - 車両制御装置 - Google Patents
車両制御装置 Download PDFInfo
- Publication number
- JP5797573B2 JP5797573B2 JP2012014756A JP2012014756A JP5797573B2 JP 5797573 B2 JP5797573 B2 JP 5797573B2 JP 2012014756 A JP2012014756 A JP 2012014756A JP 2012014756 A JP2012014756 A JP 2012014756A JP 5797573 B2 JP5797573 B2 JP 5797573B2
- Authority
- JP
- Japan
- Prior art keywords
- wheel
- torque
- road surface
- surface friction
- drive
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Landscapes
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Regulating Braking Force (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Description
本発明の目的は、路面摩擦係数にかかわらず、車輪の回転復帰速度を高めることができる車両制御装置を提供することにある。
〔実施例1〕
まず、構成を説明する。
[車両システム構成]
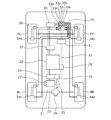
図1は、実施例1の電動車両のシステム構成図である。
図1において、4つの車輪FL,FR,RL,RRのそれぞれに対応して設けられている構成については、a,b,c,dの符号を添えて区別している。つまり、aは左前輪、bは右前輪、cは左後輪(駆動輪)、dは右後輪(駆動輪)に対応する構成を示す。以下の説明では、個別に説明する必要がある場合にのみa,b,c,dの符号を添えて区別する。
電動車両は正負のトルクを発生させることのできる駆動モータ(電動機)21を備えている。駆動モータ21には、回転センサとしてのレゾルバ22が接続され、その回転センサの情報を参照してモータコントローラ23がインバータ24に駆動信号を出力し、インバータ24が駆動モータ21に電流を供給することでモータトルクを制御する構成である。駆動モータ21にはコイル(モータ巻線)の温度を検出するモータ巻線温度センサが備えられている。また、インバータ24にはインバータ24内に配置された素子の温度を検出するインバータ素子温度センサが備えられている。
駆動モータ21の出力軸は減速ギア25に接続され、デファレンシャルギア26を介して車軸27にトルクを伝達する。駆動モータ21を駆動する電力は高電圧バッテリ28から供給される。また高電圧バッテリ28はバッテリコントローラ29によってバッテリSOCや発熱の程度を監視されている。高電圧バッテリ28にはDC-DCコンバータ37が接続されており、DC-DCコンバータ37で電圧を降圧して低電圧バッテリ30を充電することができる。
ブレーキ制御装置33は、車輪速センサ36により検出された車輪速に基づく車輪のスリップ状態に応じて車輪に設けられたキャリパ34のホイルシリンダ圧(ホイルシリンダ液圧)を増圧、保持、減圧制御して車輪のロック状態を回避するためのアンチロック制御部33aと、駆動モータ21による駆動トルクの発生量を算出する駆動トルク制御部33bと、走行中の路面摩擦状態を算出する路面摩擦状態算出部33cと、車輪に作用している輪荷重を算出する輪荷重算出部33dと、アンチロック制御部33aにより発生する制動トルクと駆動トルクとを比較する制駆動トルク比較部33eと、を備える。
ブレーキ制御装置33が摩擦制動トルクを制御する場合は、ドライバのペダル踏力に応じてブレーキ制御装置33内のポンプを動作させ、対応する電磁弁を開閉制御し、油圧配管35を通してキャリパ34にブレーキ液を送り、制動トルクを発生する。ブレーキ制御装置33がモータトルクを制御する場合は、車内通信ライン32によってモータコントローラ23にトルク指令を伝え、駆動モータ21により制動トルクを発生する。
図2は、実施例1のブレーキ制御装置33の構成図である。
図2において、p系統、s系統のそれぞれに対応して設けられている構成については、p,sの符号を添えて区別している。つまり、pはp系統、sはs系統に対応する構成を示す。以下の説明では、個別に説明する必要がある場合にのみp,sの符号を添えて区別する。
ブレーキペダル1は、ドライバの操作力(踏力)により作動し、ドライバのブレーキ操作をマスタシリンダ3へ伝達する。
電動倍力装置2はブレーキペダル1から入力された力を増幅してマスタシリンダ3へ伝える。電動倍力装置2は、ブレーキペダル1に付設したストロークセンサ15により検出されたブレーキペダル1のストロークに応じて図外の電動モータを作動させ、その発生トルクをボールねじにより直進方向の力に変換してペダルの推進力を助成することで倍力動作を行う。ストロークセンサ15の検出値はブレーキコントローラ20にも送られる。
マスタシリンダ3は、電動倍力装置2によって倍力された力によりマスタシリンダ圧を発生させ、ブレーキ液路101によりホイルシリンダ5へブレーキ液を送る。
リザーバタンク4は、ブレーキ液を貯留するタンクであり、マスタシリンダ3に接続する。
マスタシリンダ3に接続するブレーキ液路101は、ブレーキ液路108を介してギアポンプ10の吐出側へ接続する。
ブレーキ液路108には、チェック弁14を設ける。チェック弁14は、ギアポンプ10からマスタシリンダ側へのブレーキ液の流れを許容し、マスタシリンダ側からギアポンプ10への流れを防止する弁である。
ブレーキ液路103は、ブレーキ液路106を介してホイルシリンダ5へ接続する。
ブレーキ液路101には、ゲートアウト弁8を設ける。ゲートアウト弁8は、ブレーキコントローラ20からの指令電流により開閉動作を行う常開の比例制御弁である。ゲートアウト弁8は、この開閉動作によりマスタシリンダ3とギアポンプ10の吐出側およびブレーキ液路103に設けた増圧制御弁6の間を、遮断、接続および中間開度により接続する動作を行う。
ブレーキ液路101には、ゲートアウト弁8と並列にチェック弁9を設ける。チェック弁9は、(マスタシリンダ圧)>(ギアポンプ10の吐出側の液圧)となった場合に、マスタシリンダ圧をギアポンプ10の吐出側および増圧制御弁6の側へ伝える弁である。
増圧制御弁6は、ブレーキコントローラ20からの指令電流により開閉動作を行う常開の制御弁である。増圧制御弁6は、この開閉動作により、増圧制御弁6に供給されるマスタシリンダ圧またはポンプ圧をホイルシリンダ5へ供給または遮断する。
ブレーキ液路103には、増圧制御弁6と並列にチェック弁110を設ける。チェック弁110は、(ホイルシリンダ圧)>(マスタシリンダ圧)となった場合に、ホイルシリンダ圧をマスタシリンダ3へ抜く弁である。
ギアポンプ10は、共通する駆動手段として設けられるモータ11により駆動され、ブレーキ液路105に設けた内部リザーバ12に貯留されたブレーキ液をマスタシリンダ側へ掻き出す動作、またはマスタシリンダ3からブレーキ液を吸入してホイルシリンダ5の側へ吐出する動作を行う。モータ11は、ブレーキコントローラ20からの指令電流により回転数制御され、ギアポンプ10を駆動する。
内部リザーバ12は、チェック弁を有し、ブレーキ液路104からのブレーキ液の流入を制限することが可能であり、ポンプ吸入側の圧を所定値以下に保つ。
ブレーキ液路103は、ホイルシリンダ5へ接続するブレーキ液路106と、ブレーキ液路107とに分岐させる。
ブレーキ液路107は、ブレーキ液路105に合流させ、内部リザーバ12を介してギアポンプ10の吸入側に接続する。ブレーキ液路107には、減圧制御弁7を設ける。減圧制御弁7は、ブレーキコントローラ20からの指令電流により開閉動作を行う常閉の制御弁である。減圧制御弁7は、この開閉動作により、ホイルシリンダ圧を内部リザーバ12に供給、または遮断する動作を行う。
マスタシリンダ圧センサ13は、ブレーキ液路101に設けられ、マスタシリンダ圧を検出し、検出値をブレーキコントローラ20へ送る。
ポンプ圧センサ16は、ブレーキ液路108のチェック弁14とゲートアウト弁8との間に設けられ、ギアポンプ10の吐出圧を検出し、検出値をブレーキコントローラ20へ送る。リザーバ液面センサ17は、リザーバタンク4の内部に蓄えられるブレーキ液の液面高さ、すなわち、タンク内のブレーキ液量を検出し、検出値をブレーキコントローラ20へ送る。
ブレーキコントローラ20は、マスタシリンダ圧センサ13、リザーバ液面センサ17から送られる検出値、および車両から送られる走行状態に関する情報が入力され、内蔵するプログラム(アンチロック制御部33a、駆動トルク制御部33b、路面摩擦状態算出部33c、輪荷重算出部33d、制駆動トルク比較部33e)に基づき、増圧制御弁6、減圧制御弁7、ゲートアウト弁8およびモータ11を制御する。
ブレーキコントローラ20のアンチロック制御部33aは、車輪速センサ36から取得した各輪の車輪速に基づいて車輪のスリップ量(車体速度−車輪速度)を監視し、車輪のスリップ率(スリップ量/車体速度)が所定値を超えた場合に車輪がロック傾向であると判断し、ABS制御介入を行う。ABS制御では、該当車輪のホイルシリンダ圧を減少させる。なお、駆動モータ21が回生ブレーキを実施している場合には、回生ブレーキの指令はキャンセルされる。
ABS制御によりホイルシリンダ圧の減少が指令された場合、該当車輪の増圧制御弁6を閉弁、減圧制御弁7を開弁状態にしてホイルシリンダ圧を内部リザーバ12に流すことにより、ホイルシリンダ圧の減少を実現する。同時にギアポンプ10を作動させ、内部リザーバ12のブレーキ液をマスタシリンダ側へ掻き出す。
車輪のスリップ量が減少し、再びホイルシリンダ圧を増加させる場合、増圧制御弁6を開弁、減圧制御弁7を閉弁状態として、マスタシリンダ側からブレーキ液をキャリパ34に戻すことでホイルシリンダ圧の増加を実現する。ABS制御中は車輪のスリップ量の状態に応じてホイルシリンダ圧の減少と増加を繰り返す。
駆動トルク制御部33bによる駆動トルク発生量の計算方法を以下に示す。
車輪にスリップが発生した場合、ABS制御において、ブレーキ液圧制御状態における、後輪の運動方程式は下記の式(1)となる。ここでは、簡単のため、後輪2輪を1つの車輪とみなす。
Jω' = μNR - τb …(1)
ここで、Jは車輪イナーシャ、ωは車輪速、μはタイヤ−路面摩擦係数、Nは後輪荷重、Rはタイヤ動半径、τbはブレーキトルクである。
後輪のイナーシャは、タイヤ慣性と、駆動モータの等価イナーシャとの和となる。駆動モータ単体イナーシャは、減速ギアを介してタイヤに伝わり、タイヤから見た等価イナーシャは、駆動モータの単体イナーシャ×ギア比の2乗の関係で大きくなる。
電動車両では、駆動モータとタイヤは機械的に切り離せない場合が多い。式(1)より、車輪加速度はイナーシャに反比例することから、数式(1)の右辺を一定とした場合(路面摩擦やブレーキトルク条件を同じとした場合)の後輪の回転復帰加速度は小さくなる。したがって、路面摩擦係数が小さい路面でスリップが発生した場合には、回転復帰加速度が特に小さくなることから、タイヤのスリップ率が比較的大きくなる時間が長時間継続するため、その間は横力を奪われ、車両が不安定な挙動になりやすい。
下記の式(2)は、後輪に駆動トルクτmを付与した場合の後輪の運動方程式である。
Jω' = μNR - τb + τm …(2)
いま、摩擦係数の小さい路面で車輪にスリップが発生したと想定し、ABS制御介入によりホイルシリンダ圧が減少して制動トルクτb=0となったとき、所望の復帰加速度ω0'を得るための駆動トルクτm0は、下記の式(3)となる。
τm0 = Jω0' - μNR …(3)
路面摩擦係数μにおいて、車両が発生可能な減速度aは、下記の式(4)となる。
a = μg …(4)
ここで、gは重力加速度である。
減速度aのとき、後輪荷重の定常値Nは下記の式(5)となる。
N = m(Lfg - Ha)/L …(5)
ここで、mは車輪重量、Lはホイルベース、Lfは前輪軸〜車両重心距離、Hは重心高である。
N = mg(Lf - Hμ)/L …(6)
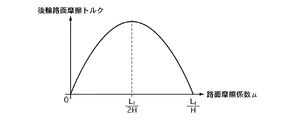
路面摩擦係数μにおいて、定常的な減速時状態における後輪路面摩擦トルクは下記の式(7)となる。ここで、路面摩擦トルクとは、路面摩擦係数μに応じて路面と車輪との間で発生可能なトルクをいう。
μNR = μmgR(Lf - Hμ)/L …(7)
以上のように、後輪が受ける後輪路面摩擦トルクは、路面摩擦係数の2乗に比例することが分かる。図3は、路面摩擦係数に対する縦軸に後輪路面摩擦トルクの特性図である。式(7)より、路面摩擦係数μがゼロとLf/Hのときに後輪路面摩擦トルクはゼロになり、Lf/2Hのときに最大となる。なお、多くの後輪駆動車は、路面摩擦係数>>Lf/2Hとならないようホイルベースと重心高が設定されており、路面摩擦係数μ=1では後輪路面摩擦トルクが十分に得られる。したがって、路面摩擦係数の低い領域で車輪の回転復帰速度を高めるためには、後輪路面摩擦トルクが十分に得られない部分をモータトルクにより補うことが有効である。
本実施例では、所望の復帰加速度ω0'を得るために、路面摩擦係数μの路面に対して、数式(7)により求められる定常的に得られる後輪路面摩擦トルクでは不足するタイヤの復帰加速度分を駆動トルクτm0として発生する。すなわち、式(3)、式(7)より下記の式(8)を得る。
τm0 = Jω0' - μmgR(Lf - Hμ) …(8)
図4に、式(8)に基づく駆動トルクτm0の発生領域(モータ駆動トルク発生領域)を示す。所望の復帰加速度に対して、後輪路面摩擦トルクとの差分が駆動トルクτm0の必要な領域となる。
ステップS1では、ABS制御中であるか否かを判定し、YESの場合はステップS5へ進み、NOの場合はステップS2へ進む。
ステップS2では、路面摩擦状態算出部33cにおいて、路面摩擦係数の推定値を初期値(例えば、1.0)にセットする。
ステップS3では、輪荷重算出部33dにおいて、後輪荷重を静荷重とする。
ステップS4では、駆動トルク制御部33bにおいて、駆動トルクをゼロとする。
ステップS5では、路面摩擦状態算出部33cにおいて、路面摩擦係数の推定値を計算する。ABS制御中は路面摩擦係数の最大部分を利用するように制御されることから、車両減速度は式(4)の関係により路面摩擦係数に変換できる。車両減速度は、前後加速度センサを用いて入力してもよいし、各車輪の加速度から推定する方法や、ホイルシリンダ圧により制動トルクを計算し、車両重量で除算することでも推定できる。なお、路面摩擦係数μについては、ABS制御によるホイルシリンダ圧減少が介入する、いわゆるロック液圧を記憶することで推定可能であるため、どちらを利用してもよい。また、特殊な路面を除き、路面摩擦係数は頻繁に大きな変化をしないことから、路面摩擦係数の推定値にはフィルタ処理を施し、値の変動が大きくならないようにしておくことが望ましく、このように構成することで、頻繁に駆動トルクの指令値が変化するのを防止できる。
ステップS6では、輪荷重算出部33dにおいて、後輪荷重推定値を計算する。車両減速度から推定する場合、式(5)に基づいて、推定路面摩擦係数から推定する場合には、式(6)から計算可能である。または、輪荷重を計測できるセンサを設けて直接取り込んでもよい。
ステップS7では、駆動トルク制御部33bにおいて、駆動トルクの発生量を演算する。式(3)に基づき、所望の復帰加速度ω0'を得るために、路面摩擦係数推定値と、輪荷重推定値と、後輪タイヤ半径とから、出力すべき駆動トルクτm0を演算する。
図6は、実施例1の駆動トルク発生判断処理の流れを示すフローチャートであり、以下、各ステップについて説明する。
ステップS10では、ABS制御中であるか否かを判定し、YESの場合はステップS12へ進み、NOの場合はステップS11へ進む。
ステップS11では、駆動トルク制御部33bにおいて、駆動トルクの発生を禁止する。
ステップS12では、駆動トルクの演算結果がゼロよりも大きいか否かを判定し、YESの場合はステップS13へ進み、NOの場合はステップS11へ進む。
ステップS13では、制駆動トルク比較部33eにおいて、駆動トルクが制動トルク要求よりも小さいか否かを判定し、YESの場合はステップS14へ進み、NOの場合はステップS11へ進む。制動トルク要求は、車両に発生させたい制動トルクのことであり、マスタシリンダ3の圧力や、ストロークセンサ15によるブレーキペダルストロークからそのときにドライバの要求している制動トルクの計算結果である。例えば、ABS制御中にドライバがブレーキペダル1を戻して、制動トルク要求を緩めた場合など、制動トルク要求が駆動トルク要求よりも小さくなると、当該駆動トルクの付与により車両はドライバの意に反して加速するため、このような状況では駆動トルクの発生は禁止されるべきである。
ステップS14では、駆動トルク制御部33bにおいて、駆動トルクの発生を許可する。
特許文献1に記載された車両制御装置では、ABS作動中、電動機により推定車体速度と実車輪速度との偏差に車輪の回転慣性を乗じた駆動トルクを発生させ、回転復帰速度を高めているものの、路面摩擦係数を考慮していないため、路面摩擦係数によっては所望の駆動トルクが得られず、車輪の回転復帰が遅くなってしまう。
さらに、推定車体速度と実車輪速度との偏差は高い周波数で変化するため、駆動トルクの指令値の変動が早く、比較的応答の速いモータトルクに対してトルク応答の遅いABSの油圧制動トルクとの協調が難しく、制御が複雑化するという問題があった。
これに対し、実施例1の車両制御装置では、ABS制御の作動時に算出された路面摩擦係数と輪荷重とに基づいて、路面と車輪との間で発生できる路面摩擦トルクを算出し、算出された路面摩擦トルクに応じて駆動トルクの発生量を算出する。このため、路面摩擦係数に応じて、車輪の復帰加速度をより確実に得ることができる。つまり、路面摩擦係数にかかわらず、車輪の回転速度を高めることができるため、車両が不安定な挙動となるのを抑制できる。
また、路面摩擦係数に基づいて駆動トルクを決定し、出力するため、駆動トルクの周波数変動が抑えられ、ABS制御との応答性の違いを考慮した複雑な制御が不要となり、簡単な制御構造で車輪の速度をより確実に復帰させることができる。
時点t0では、車輪速が目標車輪速を下回り、過スリップと判断され、ABS制御の介入によりホイルシリンダ圧を減少させる。このとき、図5に示した駆動トルク演算処理では、ステップS1→ステップS5→ステップS6→ステップS7へと進み流れとなり、図6に示した駆動トルク発生判断処理では、ステップS10→ステップS12→ステップS13→ステップS14へと進み流れとなる。よって、推定路面摩擦係数を元に、モータ駆動トルクの計算結果に応じて、モータトルクが力行側(駆動側)に発生する。駆動トルクの発生に伴い、車輪の回転は速やかに復帰する。
時点t1では、車輪速が回復したため、ABS制御では、ホイルシリンダ圧を増加させる。モータトルクは、推定路面摩擦係数に応じて発生し続ける。図示しないが、ホイルシリンダ圧を増加させる際には、駆動トルクに応じて増加勾配を高くすることが望ましい。
時点t2では、再びスリップが発生するため、ホイルシリンダ圧を減少させる。
時点t3では、車輪速が回復したため、再びホイルシリンダ圧を増加させる。
時点t4では、再度スリップが発生したため、ホイルシリンダ圧を減少させる。
時点t5では、ドライバがブレーキペダル1を戻したため、マスタシリンダ圧が減少する。これにより、車両に必要な制動トルクが減少し、モータトルクによる駆動トルクがドライバの要求する制動トルクを上回る動きとなる。このため、駆動トルク発生判断処理では、ステップS10→ステップS12→ステップS13→ステップS11へと進む流れとなり、駆動トルクの発生は禁止される。よって、モータトルクはゼロとなるため、ドライバの予期せぬ車両の加速を防止できる。
なお、以上の動作説明は、駆動輪である左右後輪を1つの車輪とみなして説明してきたが、実際の車両では、デファレンシャルギア26を介して駆動輪は2輪あり、それぞれの車輪のスリップは路面状態に応じて独立に発生することになる。このとき、デファレンシャルギア26の作用により、モータ駆動トルクおよび慣性はより路面からの摩擦トルクの小さい方に作用する性質があるため、より摩擦係数が低いか、スリップ率の大きな輪に対して駆動トルクがより有効的に働く。したがって、左右後輪で路面摩擦係数の異なるスプリット路面など、駆動輪の液圧制御が独立してなされる形態においても本制御は有効である。
実施例1の車両制御装置にあっては、以下に列挙する効果を奏する。
(1) 駆動モータ21の回転を車両に搭載された車輪に対して伝達して走行する電動車両用のブレーキ制御装置であって、車体速度に対する車輪のスリップ状態に応じてホイルシリンダ液圧を増圧、保持、減圧制御して車輪のロック状態を回避するためのアンチロック制御部33aと、駆動モータ21による駆動トルクの発生量を算出する駆動トルク制御部33bと、走行中の路面摩擦状態を算出する路面摩擦状態算出部33cと、車輪に作用している輪荷重を算出する輪荷重算出部33dと、を備え、駆動トルク制御部33bは、アンチロック制御部33aの作動時に算出された路面摩擦係数と輪荷重とに基づいて、路面と車輪との間で発生できる路面摩擦トルクを算出し、算出された路面摩擦トルクに応じて駆動トルクの発生量を算出する。
これにより、路面摩擦係数に応じて、車輪の復帰加速度をより確実に得ることができ、車両が不安定な挙動となるのを抑制できる。
また、路面摩擦係数に基づいて駆動トルクを決定し、出力するため、駆動トルクの周波数変動が抑えられ、ABS制御との応答性の違いを考慮せずに、簡単な制御構造で車輪の回転をより確実に復帰させることができる。
(2) 算出された駆動トルクとドライバの要求する制動トルクとを比較する制駆動トルク比較部33eを備え、駆動トルク制御部33bは、駆動トルクが制動トルクよりも大きい場合には、当該駆動トルクの発生を禁止する。
よって、ドライバの意図しない車両の加速を防止できる。
実施例2は、前輪駆動車に適用した例である。
[駆動トルク発生量の計算]
前輪駆動車についても考え方は後輪駆動車と同様であるが、車輪荷重の計算方法が異なる。前輪は減速度に伴い、荷重が増加する。定常的な輪荷重Nの計算は下記の式(9)から求められる。
N = m(Lrg + Ha)/L …(9)
ここで、Lrは後輪軸〜車両重心距離である。
式(4),(9)より、路面摩擦係数μにおいて、減速時の前輪荷重の定常値Nは下記の式(10)となる。
N = mg(Lr + Hμ)/L …(10)
路面摩擦係数μにおいて、定常的な減速時状態における前輪路面摩擦トルクは下記の式(7)となる。
μNR = μmgR(Lr + Hμ)/L …(7)
図8に、式(11)に基づく駆動トルクτm0の発生領域(モータ駆動トルク発生領域)を示す。前輪路面摩擦トルク発生特性は、図4に示した後輪駆動車の特性(上に凸の2次特性)とは異なり、下に凸の2次特性となる。ただし、所望の復帰加速度に対して、前輪路面摩擦トルクとの差分が駆動トルクの必要な領域であることには変わらない。式(9)〜(11)に基づけば、前輪駆動車で駆動トルクの発生量は計算可能であり、後輪駆動の場合と、同様の作用効果が得られる。
以上のように、実施例2の車両制御装置にあっては、実施例1と同様の作用効果を奏する。
以上、本発明を実施するための形態を実施例に基づいて説明したが、本発明の具体的な構成は実施例に示した構成に限定されるものではなく、発明の要旨を逸脱しない範囲の設計変更等があっても本発明に含まれる。
例えば、図4に示した特性から、路面摩擦係数とモータトルク特性をテーブルで定義し、モータトルクの発生量を演算してもよいし、路面摩擦トルクの特性をμの2次関数ではなく1次関数に近似して演算させてもよい。
RL,RR 左右後輪(駆動輪)
21 駆動モータ(電動機)
33a アンチロック制御部
33b 駆動トルク制御部
33c 路面摩擦状態算出部
33d 輪荷重算出部
33e 制駆動トルク比較部
Claims (1)
- 電動機の回転を車両に搭載された車輪に対して伝達して走行する電動車両用のブレーキ制御装置であって、
車体速度に対する前記車輪のスリップ状態に応じてホイルシリンダ液圧を増圧、保持、減圧制御して前記車輪のロック状態を回避するためのアンチロック制御部と、
前記電動機による駆動トルクの発生量を算出する駆動トルク制御部と、
走行中の路面摩擦状態を算出する路面摩擦状態算出部と、
前記車輪に作用している輪荷重を算出する輪荷重算出部と、
前記算出された駆動トルクとドライバの要求する制動トルクとを比較する制駆動トルク比較部と、
を備え、
前記駆動トルク制御部は、前記アンチロック制御部の作動時に前記算出された路面摩擦係数と前記輪荷重とに基づいて、前記路面と前記車輪との間で発生できる路面摩擦トルクを算出し、前記算出された路面摩擦トルクに応じて前記駆動トルクの発生量を算出するのに加え、前記算出された駆動トルクが前記ドライバの要求する制動トルクよりも大きい場合には、当該駆動トルクの発生を禁止することを特徴とする車両制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012014756A JP5797573B2 (ja) | 2012-01-27 | 2012-01-27 | 車両制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012014756A JP5797573B2 (ja) | 2012-01-27 | 2012-01-27 | 車両制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013158080A JP2013158080A (ja) | 2013-08-15 |
| JP5797573B2 true JP5797573B2 (ja) | 2015-10-21 |
Family
ID=49052779
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012014756A Expired - Fee Related JP5797573B2 (ja) | 2012-01-27 | 2012-01-27 | 車両制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5797573B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102042288B1 (ko) * | 2014-10-24 | 2019-11-07 | 현대자동차주식회사 | 노면마찰계수 측정 장치 및 방법 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4517622B2 (ja) * | 2003-10-07 | 2010-08-04 | 横浜ゴム株式会社 | Absの制御方法および制御装置 |
| JP4732003B2 (ja) * | 2005-05-27 | 2011-07-27 | 富士重工業株式会社 | 電動車両の駆動力制御装置 |
| JP2008100532A (ja) * | 2006-10-17 | 2008-05-01 | Denso Corp | ハイブリッド車両の駆動制御装置 |
| JP5148393B2 (ja) * | 2008-07-10 | 2013-02-20 | 日立オートモティブシステムズ株式会社 | 車両用制駆動力制御装置 |
| JP5195522B2 (ja) * | 2009-03-02 | 2013-05-08 | 日産自動車株式会社 | 四輪駆動車両の駆動力制御装置 |
-
2012
- 2012-01-27 JP JP2012014756A patent/JP5797573B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2013158080A (ja) | 2013-08-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11021068B2 (en) | Vehicle control device and control method | |
| US9707944B2 (en) | Braking force control system | |
| JP4913205B2 (ja) | 電動車両の制動制御装置 | |
| JP5906173B2 (ja) | 車両制御装置 | |
| KR101697809B1 (ko) | 브레이킹 및 드라이빙 동작들로 드라이빙 역학에 영향을 미치는 방법 및 브레이킹 시스템 | |
| JP5983871B2 (ja) | ブレーキ装置 | |
| US20050004738A1 (en) | Method for modifying a driving stability control of a vehicle | |
| JP6485418B2 (ja) | ブレーキ制御装置 | |
| WO2014148278A1 (ja) | ブレーキ制御装置 | |
| US9895978B2 (en) | Braking force control method for vehicle | |
| US11648933B2 (en) | Method for controlling wheel slip of vehicle | |
| JP2005028934A (ja) | 車両姿勢制御装置 | |
| JP5506632B2 (ja) | 車両用ブレーキ装置 | |
| US11548393B2 (en) | Braking method and system for an electric vehicle | |
| JP2010188801A (ja) | 車両の重心位置推定装置 | |
| CN108860115A (zh) | 车辆主动制动的控制方法、装置及车辆主动制动系统 | |
| EP2565091B1 (en) | Method and system for controlling brake fluid pressure | |
| JP7169461B2 (ja) | 制御装置 | |
| JP5797573B2 (ja) | 車両制御装置 | |
| JP6205875B2 (ja) | 車両挙動制御装置及び車両挙動制御方法 | |
| JP5971186B2 (ja) | 車輪制御装置、車両 | |
| JP2007083750A (ja) | 定速走行制御装置及び制御方法 | |
| JP2006200526A (ja) | 車両の出力特性制御装置 | |
| JP6205841B2 (ja) | 車両挙動制御装置及び車両挙動制御方法 | |
| US20230089908A1 (en) | Vehicle motion controller |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20141006 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150520 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150526 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150624 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150804 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150819 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5797573 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |