JP5769971B2 - Gnss受信機及び信号追跡回路及びシステム - Google Patents
Gnss受信機及び信号追跡回路及びシステム Download PDFInfo
- Publication number
- JP5769971B2 JP5769971B2 JP2010533595A JP2010533595A JP5769971B2 JP 5769971 B2 JP5769971 B2 JP 5769971B2 JP 2010533595 A JP2010533595 A JP 2010533595A JP 2010533595 A JP2010533595 A JP 2010533595A JP 5769971 B2 JP5769971 B2 JP 5769971B2
- Authority
- JP
- Japan
- Prior art keywords
- code
- channel
- channels
- dft
- taps
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 claims description 10
- 239000010931 gold Substances 0.000 claims description 10
- 229910052737 gold Inorganic materials 0.000 claims description 10
- 238000003775 Density Functional Theory Methods 0.000 description 64
- 230000001427 coherent effect Effects 0.000 description 39
- 238000012545 processing Methods 0.000 description 19
- 238000005259 measurement Methods 0.000 description 16
- 238000004364 calculation method Methods 0.000 description 14
- 230000010354 integration Effects 0.000 description 12
- 230000007480 spreading Effects 0.000 description 11
- 230000035508 accumulation Effects 0.000 description 10
- 238000009825 accumulation Methods 0.000 description 10
- 238000013459 approach Methods 0.000 description 5
- 230000006870 function Effects 0.000 description 5
- 238000007726 management method Methods 0.000 description 4
- 230000007246 mechanism Effects 0.000 description 4
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 3
- 239000000969 carrier Substances 0.000 description 3
- 238000013507 mapping Methods 0.000 description 3
- 238000000034 method Methods 0.000 description 3
- 238000005070 sampling Methods 0.000 description 3
- 229910052710 silicon Inorganic materials 0.000 description 3
- 239000010703 silicon Substances 0.000 description 3
- 238000012546 transfer Methods 0.000 description 3
- 238000004422 calculation algorithm Methods 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 238000000605 extraction Methods 0.000 description 2
- 238000013213 extrapolation Methods 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 239000000047 product Substances 0.000 description 2
- 238000010845 search algorithm Methods 0.000 description 2
- 238000001228 spectrum Methods 0.000 description 2
- 239000013589 supplement Substances 0.000 description 2
- 241000238634 Libellulidae Species 0.000 description 1
- 239000004165 Methyl ester of fatty acids Substances 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 230000003139 buffering effect Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000012790 confirmation Methods 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 239000013078 crystal Substances 0.000 description 1
- 230000001186 cumulative effect Effects 0.000 description 1
- 238000013506 data mapping Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 238000003708 edge detection Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 230000005055 memory storage Effects 0.000 description 1
- 230000000116 mitigating effect Effects 0.000 description 1
- 238000010295 mobile communication Methods 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 238000007781 pre-processing Methods 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
Images


Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/01—Satellite radio beacon positioning systems transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/13—Receivers
- G01S19/24—Acquisition or tracking or demodulation of signals transmitted by the system
- G01S19/30—Acquisition or tracking or demodulation of signals transmitted by the system code related
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/01—Satellite radio beacon positioning systems transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/13—Receivers
- G01S19/35—Constructional details or hardware or software details of the signal processing chain
- G01S19/37—Hardware or software details of the signal processing chain
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Computer Networks & Wireless Communication (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Signal Processing (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
- Circuits Of Receivers In General (AREA)
Description
本発明は、特に、隣接タップ間の符号位相関係を調整することによってブロックの精度又は符号位相範囲を好適化するための手段に関するものである。
ガリレオモードにおいては、我々は、MBOC信号を復号するためにより高い分解能においてタップを動作させる必要があり、我々は、マルチパス検出を助けるためにこの特徴を上述のように用いることも可能である。さらに、これは、チャネルを用いて探索モードを加速するためにタップ間隔を大きくすることを可能にする。
本発明は、特に、搬送波除去(wipeoff)及び符号生成がマスタチャネルによって行われ、そして次に追加のスレーブチャネルを通されるように2つ以上のチャネルを連鎖することによって、ゴールド符号のために網羅された符号位相範囲を拡大するための手段に関するものであり、スレーブチャネルにおける符号及び搬送波の生成は、電力を節約するためにディスエーブルにされることができる。
これは、例えば64チャネル相関器を、4つの実際のチャネルを用いてSWの観点から単一の相関器として実装するのを可能にし、これは、探索エンジンを起動せずに再取得を可能にする32タップウィンドウを提供する。
本発明は、さらに、相関器出力に対するDSP計算、例えばDFT演算、を行うことによって相関器の周波数範囲を拡大するための手段に関するものであり、DFTラインは、符号/搬送波NCOの周波数を中心とする周波数範囲を網羅する。電力を節約するために及び/又は例えば異なるゴールド符号を含む異なる信号との相互相関によって生じた干渉をマスキングするために潜在的周波数ラインのうちの1つ以上をディスエーブルにされることができるのが好ましい。
本発明の一態様は、選択的タップ/ラインマスクを有するGNSSプロセッサに関するものであり、これらは、我々が探索のためにチャネルを用いること及びプルイン中に信号のウィンドウを拡大し、その後に追跡ループがロックされたときに電力を節約するために再度小さくすることを可能にする。
本発明は、さらに、複数の信号符号、例えばゴールド符号、に対する幾つかの相関関係を計算するための手段に関するものであり、各タップのための計算ウィンドウは重なり合っており、これらのウィンドウは、確定的(deterministic)間隔によってオフセットされ、従って、各タップからの相関出力は時間的に分離され、共有資源を用いて、さらなるパイプライン化された処理を可能にする。
一定の長さの積分ウィンドウを使用し及びそれらを時間の点でジグザグに配置すること(staggering)によって、各相関器出力は幾つかのサイクルだけオフセットされ、このため相関資源を2ステージ相関器アーキテクチャにおいて共有することができ、出力を全チャネルにわたってジグザグにすることによって、我々は、非常に数少ない資源を用いて全チャネルのための単一のDFTエンジンを実装することができ、全相関器が結果用の単一の出力メモリを共有するのを可能にし、それが電力を低減させてケイ素エリアを小さくする。
本発明は、さらに、相関結果を処理するための手段であって、その処理は、コヒーレント処理及び非コヒーレント処理の両方、例えば、マグニチュードの非コヒーレント累積によって後続されるコヒーレントDFT、を含むことができる手段、及び1つまたは複数のチャネルに関して、これらのチャネルのための出力データ構造がコヒーレント相関からの複素結果を含むか又は非コヒーレント累積の結果を含むかを選択するための手段、に関するものである。
探索モードに関して、我々は、長時間にわたって積分されたマグニチュードを検討するが、正確な追跡のためには、搬送波位相測定値と結合された、追跡エンジンのためのより良い分解能を提供するコヒーレント積分のI/Q成分を用いるのが理想的である。
本発明は、さらに、チャネルに関する複数のタップ/DFTラインを処理するための手段に関するものであり、出力内のタップ/DFTラインは、適用対象となる領域に従って選択可能であり、ノイズフロア推定手段を提供するために追加の組のDFTライン/タップが陰的に計算される(implicitly computed)。
探索/追跡アルゴリズムの性能を最適化するために、経時で変化するノイズフロア測定を行う必要があり、これは、理想的には、追跡中の信号の付近において、ただしピークから十分に離れて、行うべきである。好ましくは、本発明のGNSSプロセッサは、複数のタップ、例えばDFTウィンドウの端部における4タップ、を測定するように配置される。我々は、DFTを制御するためにビットマスクを用いるため、これは、すべてのイネーブルにされたライン/タップの組み合わせが計算されることを暗に示すが、陰的マスク(implicit mask)を用いることによって、我々が関心のないタップはマスキングされる。
本発明は、さらに、符号を相関器に加える前に修正することによって、選択された特徴、例えばガリレオのパイロットチャネルにおいて用いられるようなナビゲーションデータメッセージ又は追加の拡散符号、を追跡中の信号から除去するための手段に関するものである。データパターンは、固定された位相関係を有する符号に加えられ、このため、それは、相関ウィンドウの位相又は長さにかかわらず信号データ境界に対して引き続きコヒーレントである。
我々は、符号に整合されておらず、及び符号と同じ長さでないウィンドウにわたって積分中であるため、データ除去後相関を当てはめるとその結果データが不整合になる。符号生成器の出力においてデータ除去を符号に適用することによって、データ除去は常時完全に整合される。
さらに、本発明は、相関器の選択されたタップに対して代替の拡散符号を適用するための手段に関するものであり、適用される符号の位相関係は固定されるか又は調整可能であり、第1の信号が追跡ループを制御するために使用中である間に第1の信号と同じ搬送波周波数において第2の拡散符号を用いて送信される第2の信号に含まれるデータメッセージの抽出を容易にするために特定の相関器出力タップにおける第1の拡散符号の特定のタップと同相であるようにする。
ガリレオは、同じ搬送波周波数において送信される2つの符号を使用し、1つの符号は、既知の25ビット拡散符号を用いて変調され、SVを追跡するために用いられ、これは、ナビゲーションデータメッセージを知らない状態でより高い感度を可能にする。第2の符号は、ナビゲーションデータを転送するために用いられる。我々は、パイロット符号を追跡中であるため、ナビゲーションデータメッセージを抽出するために単一のタップが必要であり、2つの信号の搬送波及び符号の位相はコヒーレントであるため、このデータを抽出するために正確な符号位相を維持し及び1つのタップを用いる必要がある。我々は、相関器チャネルウィンドウの中央のタップを追跡のための中心点として選択するため、第2の符号が対象となるタップと整合されるようにそれを移相させる必要がある。
さらに、本発明は、結果的に得られる出力のDFTライン間隔を制御するために相関ウィンドウサイズ、及び/又は各々のDFT係数ごとに適用されるコヒーレント累積の数を制御するための手段に関するものである。
DFTライン演算は、複素信号に回転複素ベクトルを乗じることを要求する。我々は、ハードウェアにおいてリアルタイムで計算するため、近似値テーブルを使用し及びサンプルに従って係数を選択しなければならない。
さらに、本発明は、一定の相関器出力を選択的に無視しその一方でDFT係数インデックスを依然として更新することによってコヒーレントな積分整合を選択するための手段に関するものであり、コヒーレント累積は、DFT処理が必要な搬送波位相整合を維持する一方で、信号の特徴、例えばナビゲーションデータメッセージのビット境界、との整合性を維持することができる。
我々の積分ウィンドウはステップ状であり(stepped)、符号長の正確な倍数ではないため、すべてのサンプルが符号と同相状態でコヒーレントに累積されるのを保証することができず、これは、信号がコヒーレント積分の途中に反転して結果を破壊する可能性があるため、データ除去が用いられないときには経時で有意な信号損失を引き起こすことになるであろう。
本発明の他の態様は、多ステージ搬送波除去機構に関するものであり、着信IF/IQデータが基準搬送波と混合されて搬送波のほとんどが除去されるが、使用される搬送波は、例えば10Khzの残留搬送波を残すように構成される多ステージ搬送波除去機構に関するものである。各チャネルにおいて残留搬送波のさらなる除去が第2の搬送波NCOによって行われる。
第1ステージミキサにおいて搬送波のほとんどを除去することによって、我々は、基準クロック周波数ドリフト及び周波数計画について補償することができ、全チャネルが使用中の周波数計画にかかわらずに小さい周波数範囲用にサイズが定められた搬送波NCOを用いるのを可能にする。
本発明の他の態様は、中心周波数ラインを計算し、次に1つの方向に幾つかのラインだけステップし、幾つかのラインが計算された後に中心線からオフセットされた反対方向にステップすることによって行われるDFT計算に関するものであり、単純な係数計算を用いてDFTラインの部分組を計算されることを可能にする。
DFT係数計算は、テーブル内へのインデキシングを要求し、各々の後続する係数は、DFTライン間隔によって決定された以前の係数からの一定の回転オフセットを有する。
本発明の一態様により、既知のイベント、例えば、RF基準クロックと同期で動作される基準タイマ、と同期の精密な始動時間(startup time)を決定することによって、符号/搬送波位相、符号エポックカウント、ナビゲーションデータメッセージ位相、等に関する正確な値を、他のチャネル、例えば、探索エンジン内のチャネル、又は他の追跡チャネル、からの測定の外挿によって計算することができる。
我々は、資源管理を可能にするために、チャネルを始動させるとき、特にチャネルの動作モード、例えば計算されたタップ数、を有意に変更するときには出力データ構造内におけるデータの順序を変更することになり、符号生成器及びNCO、等を初期化できるようにする必要がある。
本発明の一態様により、出力メモリを複数の相関エンジン間で共有する手段が提供され、メモリは、完全な相関エンジンの結合されたデータ出力能力ではなく全体的なシステム要求に従ってサイズが定められる。
通常の追跡動作中においては、追跡エンジンは、利用可能なタップの一部のみを計算する必要があるだけであり、計算されるタップ数及びそれらが計算されるモードは、動作中に異なるチャネルごとに動的に変化する。
本発明の他の態様は、追跡を容易にするために幾つかのTAP/DFTラインの組み合わせに関する一組のリアルタイム相関結果から成るコヒーレント相関結果を相関器チャネルのためにプロセッサに渡す手段に関するものであり、このリアルタイムのデータに加えて、プロンプトデータセットと呼ばれる履歴データセットが1つまたは複数のタップのために提示され、ここで、これらのタップは、最も強い相関位相にあるような形で拡散符号と整合されるようにするために選択される。
信号を追跡するために、ソフトウェアがプロセッサの負荷、等に依存してリアルタイムで各チャネルに対処する必要はない。しかしながら、ナビゲーションデータメッセージを効率的に抽出するために、ナビゲーションデータメッセージのエッジを決定できるようにプロンプトタップの全サンプルが要求される。
以下は、次世代GNSSプラットフォームアーキテクチャについて記述する。この文書の目的は、そのアーキテクチャのHW及びSWアーキテクチャの詳細を、本発明と関連させて説明することである。
プラットフォーム概念は、とりわけ、新しい所有権を有する探索アルゴリズムに基づく。本発明のプロセッサの探索エンジンは、この新しい探索アルゴリズム専用に開発された。
本発明の追跡エンジンは、実際には探索エンジンからアーキテクチャが導き出される以前のデバイスとの類似性はまったくない。本発明においては、追跡機能及び探索機能は、目標とする機能のために各々が高度に最適化された2つの独立したエンジンに分離される。
ハードウェア内においてアルゴリズムを実行するときには、探索であるか又は追跡であるかにかかわらず、所定の時間量において実行することが要求される処理量は有限である。この処理は一定の速度ではないことができる一方で、ピークの処理要求及びレーテンシー要求によって制限される。
RFインタフェースは、対象となるプロセッサ内の全ブロックに共通するものであり、各々のチャネルごとに適切なサイズが設定されたNCOを用いた搬送波位相測定を可能にすることができる十分な大きさの残留搬送波を有する適切な表現(representation)に変換するための入力データの前処理を提供する。
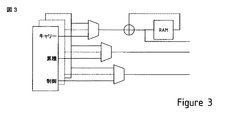
図1を参照すると、RFからのデータは、マッピングユニットへのIF又は複素I/Qデータとして到着し、生データ表現がプロセッサ全体のための適切なマッピングに変換される。MAPは、RAMに基づくルックアップテーブルであり、あらゆるソースデータ表現を適宜マッピングするのを可能にする。
マッピング後は、データが搬送波と混合されて主搬送波成分が除去され、これは、典型的には約10Khzの小さい残留搬送波成分を有する複素信号を生成し、この初期搬送波除去は、TCXO周波数補正のための単一の制御ポイントを可能にし、CDXO、等の安定度がより低い基準を用いるときの周波数ドリフトの補償を可能にする。
AGC機能は、RF出力の統計的ビニング(binning)を提供し、RFにおける利得をプログラミングすることによってSWによって制御されたAGCを可能にする。
本発明の一態様により、追跡エンジンは、上述される原理に基づいており、追跡精度を向上させるために各チャネルに関して符号及び搬送波位相の両方が精密に制御及び測定されることを可能にする。しかしながら、それは、幾つかの追加機能も実装する。
各追跡チャネルは、各チャネルに関して個々に選択可能な最高16のタップを提供し、これらのタップは、タップ間において1/8チップまでの分解能を可能にするプログラマブルな間隔を有することができ、これは、マルチパス干渉の識別及び実際に追跡されたピークよりも弱い可能性がある真のピークの選択を助けることを目的とする相関ピーク形状の慎重な分析を可能にする。
追跡エンジンにおいては、チャネルは4つのチャネルから成るブロックに分けられ、これらのグループ内において、連続するチャネルが連鎖され、1つ又は2つの大きいチャネルを単一のグループから作り出されることを可能にする。このモードにおいては、マスタチャネルの符号生成器及びNCOが用いられ、スレーブチャネルユニットは、電力を節約するためにディスエーブルにされる。
4つのチャネルから成る各グループにおいては、ガリレオチャネルとして動作するように構成可能な1つの特別なチャネル(0)が存在し、このチャネルは、データ復元に用いられるタップ0に割り当てられた追加の符号生成器を有しており、主符号生成器は、パイロット符号を追跡するためのタップ1において供給される。
すべてのチャネルがデータ除去をサポートしており、GPSモードにおいては、これは、CPUが周期的に、すなわち320msごとに、16の符号サンプルをローディングするレジスタを用いて16ビット符号セグメントをサポートし、この符号は、検出されたビットエッジに対して正確に位相整合することができ、その後は、チャネルの符号NCOによって制御されてビットエッジ同期化が維持される。SWに対するリアルタイムの制限を取り除くために及び符号をホストにおいてバッファリングしてプロセッサにシリアルに送信してメモリフットプリントを低減させるのを可能にするためにハンドシェーキングを有するダブルバッファリングが提供される。ガリレオモードにおいては、データチャネルはまったく追跡されないため、データ除去レジスタは、25ビットまで拡張されてパイロットチャネルに適用される。この符号は周期的に動作し、従って、いったん初期化された後は、CPUはそれを更新する必要がまったくない。
好ましくは、本発明のプロセッサは、弁別器を助けることを目的としてDFT演算を実行するように配置又はプログラミングされ、これは、好ましくはハードウェア内に実装され、従って、それに関連するCPUオーバーヘッドは存在しない。スキマ(skimmer)及びディスティラ(distiller)と同様に、電力を節約するために個々のDFTラインをディスエーブルにすることができる。
ノイズフロアの検出を助けるために、TEは、電力を節約するために、TAP及びDFTラインマスク設定から独立して特定のDFTライン及びタップを専用データ構造に出力するように構成することができる。
追跡エンジン内の資源管理を容易にするために、搬送波及び符号位相の両方を既知の値及び正確な時間基準に初期化することができ、これは、チャネルをリセット又は再構成して正確な整合性を持って動作を開始するのを可能にする。
追跡チャネルからの出力は、測定情報用レジスタ内及び全タップ出力用の共有RAMバッファ内において提供される。各チャネルは、その他の全チャネルと完全に独立して構成することができ、マグニチュードモード又は複素モードのいずれかにおいて動作することができる。マグニチュードモードにおいては、非コヒーレント積分が数秒間促進されて(facilitate)マグニチュードデータが出力され、これは、探索確認フェーズのために用いられる。追跡モードにおいては、出力データは、より正確な追跡を可能にするために各々の選択されたタップ/ラインの組み合わせに関する複素I/Q値であるように構成することができる。
電力及びケイ素エリアを節約するために、追跡エンジンは、ステップ付き(stepped)相関モードで動作し、これは、各タップは正確に同じ継続時間にわたって積分するが、各タップのための実際のデータサンプルは一定のサイクル数だけオフセットされることを意味する。これは、多ステージ相関器手法を可能にし、各相関器の下位ビットはすべて専用累積器及びレジスタを有するが、上位ビットは、単一の累積器を共有し及び順次計算され、ケイ素及び電力の点ではるかにより効率的なメモリ内にそれらの結果を累積するのを可能にする。
キャリーフラグを用いた場合は、これは1タップ当たり22ビットを要求し、5632のレジスタ及び5632の全加算器セルになる。
追跡エンジン内の全チャネルは、共通のDFTユニットを共有し、これは、全チャネルがそれぞれの累積された結果を一定の精密に制御された順序で出力することによって容易にされる。このタイミングは、最上位タイミングコントローラによって維持され、最上位タイミングコントローラは、RF基準クロック周波数に従って数値オーバーフローを防止するレートに出力データレートを低下させるようにプログラミングすることができる。さらに、このタイミングコントローラを用いることで、精密なDFTライン間隔を保証するために基準ブロックにかかわらず有効出力レートを一定値に設定することができる。
DFTライン間隔を制御するために、マスタタイミングコントローラを用いてサンプルレートを制御することができる。さらに、各組のDFT係数用に累積されたサンプル数は、1つのチャネルごとに設定することができ、250us乃至2msにおける有効なDFTサンプルレートを可能にする。
いずれのタップに関する実際の積分期間も、ドップラ及びクロッキング上の課題に起因して関連するSVの符号レートに正確に関連づけられていないため、追跡エンジンチャネルは、各々が、ビットエッジ境界に対して積分位相を追跡するモニタを有する。これらのモニタは、ナビゲーションデータメッセージビットエッジに合わせて粗コヒーレント積分同期化を維持するために必要に応じてコヒーレント/非コヒーレント位相を調整することをチャネルに自動的に行わせる。
追跡モードにおいて電力をさらに節約するために、追跡エンジンは、完全に基準クロックから動作し、処理パイプラインは、この動作を容易にするように慎重に設計される。これは、本発明のプロセッサが低電力追跡モードにおいてPLLなしで動作するのを可能にする。
GNSSエンジン全体におけるすべての測定は、RF基準クロックから継続的に動作される基準タイマを用いて行われる。これは、全チャネルにおいて同時に行われる精密な測定を通じて追跡を容易にし、チャネルの制御及びセットアップを単純化する。
基準クロックがディスエーブルにされることがある断続的動作を容易にするため、又は外部イベント、例えばネットワーク時間同期化イベント、との同期化を可能にするために、補助時間基準回路が含まれており、これは、外部信号に対する、又は独立したクロックソース、例えばRTC水晶発振器、から動作される内部タイマに対する基準タイマ位相の測定を行う能力を有する。このユニットは、外部イベントの立ち上がりエッジ及び立ち下がりエッジの両方に関するエッジ検出を提供するように、及び/又は基準タイマを測定することができる基準となる2次的内部タイミング基準を提供するように構成することができ、それは、絶対位相が計算される。これは、GNSSエンジン内のチャネル制御機構とともに、全システム環境における割り込まれた基準クロックを用いた動作及び信号の高速再取得を可能にする。
GNSSエンジン及びその関連づけられた周辺機器へのプロセッサインタフェースは、一般的同期インタフェース及びAHB/APBバス用のラッパから成る。これは、GNSSコア論理の変更を行わずに既知のCPUアーキテクチャに簡単にポートするのを可能にする。
SBAS及びビタビ演算のためのナビゲーションデータメッセージを復号するために要求される処理を低減させるために、本発明のプロセッサは、好ましくは、ビタビ加速器を含む。これは、プロセッサコア及びGNSSに関する制限に合わせて最適化されたビタビ命令セットを用いてARCプロセッサアーキテクチャを拡張した、特許が取得されたアーキテクチャに基づく。
下記に出願時請求項1−22に対応した記載を付記1−22として表記する。
付記1
GNSSプロセッサであって、
1つまたは複数のチャネルから成る幾つかの信号に関する幾つかの相関値を生成するための複数の相関ブロックを含み、各相関ブロックは、搬送波を除去し及びその結果得られた信号に前記信号の期待される特徴に対応する符号、例えばゴールド符号、を乗じるための手段を含み、各相関ブロックは、連続した符号位相範囲内において1つまたは複数のタップを生成するためにイネーブルにされ、前記タップのうちの1つまたは複数が、電力を節約するためにディスエーブルにして計算から除外することができる、追跡モジュール、を備える、GNSSプロセッサ。
付記2
前記ブロック内の隣接タップ間における符号位相関係を調整することによって前記ブロックの精度又は符号位相範囲を好適化するための手段を含む前記付記に記載のGNSSプロセッサ。
付記3
2つ以上のチャネルを連鎖し、従って搬送波除去及び符号生成がマスタチャネルによって行われ、次に追加のスレーブチャネルを通じて渡されるようにすることによって符号のために網羅された前記符号位相範囲を拡大するための手段を含み、前記スレーブチャネルにおける前記符号及び搬送波の生成は、電力を節約するためにディスエーブルにすることができる前記付記のいずれかに記載のGNSSプロセッサ。
付記4
相関器出力に対するDSP計算、例えばDFT計算、を行うことによって相関器の周波数範囲を拡大するための手段を備え、DFTラインは、前記符号/搬送波NCOの周波数の中央における周波数範囲を網羅する前記付記のうちのいずれかに記載のGNSSプロセッサ。
付記5
GNSSプロセッサであって、
複数の信号符号、例えばゴールド符号、に対して幾つかの相関を計算するための複数の相関タップを備え、各タップに関する計算ウィンドウは、重なり合っており、前記ウィンドウは、確定的間隔だけオフセットされ、従って、各タップからの相関出力は時間の点で分離され、共有資源を用いたさらなるパイプライン化された処理を可能にする、GNSSプロセッサ。
付記6
コヒーレント処理及び非コヒーレント処理の両方、例えば、マグニチュードの非コヒーレント累積によって後続されるコヒーレントDFT、を含む前記付記に記載のプロセッサ。
付記7
1つまたは複数のチャネルに関して、前記チャネルに関する出力データ構造がコヒーレント相関からの複素結果を含むか、又は非コヒーレント累積の結果を含むかを選択するための手段を備える前記付記のうちのいずれかに記載のGNSSプロセッサ。
付記8
チャネルのための複数のタップ/DFTラインを処理するための手段を備え、出力内の前記タップ/DFTラインは、適用対象となる領域に従って選択可能であり、ノイズフロア推定手段を提供するために追加の組のDFTライン/タップが陰的に計算される前記付記のうちのいずれかに記載のGNSSプロセッサ。
付記9
符号を前記相関器に適用する前に修正することによって、追跡中の信号から選択された特徴、例えばガリレオにおけるパイロットチャネルにおいて用いられるようなナビゲーションデータメッセージ又は追加の拡散符号、を除去するための手段を備え、前記データパターンは、一定の位相関係を有する前記符号に適用され、従って、前記相関ウィンドウの位相又は長さにかかわらず信号データ境界に対して引き続きコヒーレントである前記付記のうちのいずれかに記載のGNSSプロセッサ。
付記10
前記相関器の選択されたタップに代替拡散符号を適用するための手段を備え、適用される前記符号の位相関係は、固定されるか又は調整可能であり、前記第1の信号が追跡ループを制御するために使用中である間に前記第1の信号と同じ搬送波周波数で前記第2の拡散符号を用いて送信される第2の信号に含まれるデータメッセージの抽出を容易にするために特定のタップにおいて前記第1の拡散符号の特定のタップと同相であるようにされる前記付記のうちのいずれかに記載のGNSSプロセッサ。
付記11
結果的に得られる出力のDFTライン間隔を制御するために前記相関ウィンドウのサイズ、及び/又は各DFT係数に関して適用されるコヒーレント累積の数を制御するための手段を備える前記付記のうちのいずれかに記載のGNSSプロセッサ。
付記12
一定の相関器出力を選択的に無視することによってコヒーレント積分整合性を選択し、その一方で前記DFT係数インデックスを更新し、それにより前記コヒーレント累積が前記信号の特徴、例えば、前記ナビゲーションデータメッセージの信号データビット境界、との整合性を維持することができるようにし、その一方で前記DFT処理が必要な搬送波位相整合性を維持する手段を備える前記付記のうちのいずれかに記載のGNSSプロセッサ。
付記13
GNSSプロセッサであって、
複数の信号符号、例えばゴールド符号、に対して幾つかの相関を計算するための複数の相関タップを備え、着信IF/IQデータが基準搬送波と混合されて前記搬送波のほとんどが除去されるが用いられる搬送波は例えば10Khzの残留搬送波を残すように構成される多ステージ搬送波除去機構を含み、前記残留搬送波のさらなる除去は、各チャネルにおいて第2の搬送波NCOによって行われ、搬送波位相測定をより高いナビゲーション精度のために用いるのを可能にする、GNSSプロセッサ。
付記14
前記基準クロック周波数の変動に起因するシステム上の搬送波ドリフトを補償するために前記マスタ搬送波NCOを調整するための調整手段を含む前記付記のうちのいずれかに記載のGNSSプロセッサ。
付記15
1ms基準タイマからのパルス、等のトリガを用いて全チャネルにおいて同時にすべての搬送波及び符号NCO値をサンプリングするための手段を含む前記付記のうちのいずれかに記載のGNSSプロセッサ。
付記16
GNSSプロセッサであって、
複数の信号符号、例えばゴールド符号、に対して幾つかの相関を計算するための複数の相関タップを備え、特定の周波数ラインを計算し次に幾つかのラインだけ1方向にステップし、幾つかのラインが計算された後に第2の特定のラインからオフセットされた反対方向にステップし、単純な係数計算を用いて前記DFTラインの部分組を計算するのを可能にするDFTプロセッサを含む、GNSSプロセッサ。
付記17
計算された前記第1の特定のラインは、前記DFTセンターラインであり、前記第2のステップにおいて計算された前記第1の特定のラインは、ライン“−1”である付記16に記載のGNSSプロセッサ。
付記18
前記係数に関する前記ステップは、前記DFTテーブルサイズ、DFTライン間隔、及びコヒーレントサンプルインデックスによって決定される前記付記のうちのいずれかに記載のGNSSプロセッサ。
付記19
既知のイベント、例えば、前記RF基準クロックと同期で動作される基準タイマ、と同期の精密な立ち上がり時間を決定することにより、符号/搬送波位相、符号エポックカウント、ナビゲーションデータメッセージ位相、等に関する前記精密な値は、他のチャネル、例えば探索エンジン内のチャネル、又は他の追跡チャネル、からの測定の外挿によって計算することができる前記付記のうちのいずれかに記載のGNSSプロセッサ。
付記20
事前にチャネルの構成内にこれらの値をプログラミングし、従って前記チャネルが該当するハードウェアを要求された状態に初期化する時間を有するようにし、次に、正確な始動時間をプログラミングすることによって、前記チャネルは、符号生成器、等のエンジンを予め初期化し、始動するように構成される瞬間までそれらが動作しない状態にすることができるようにする前記付記に記載のGNSSプロセッサ。
付記21
複数の相関エンジン間において出力メモリを共有する手段を含み、前記メモリは、完全な相関エンジンの結合されたデータ出力能力ではなく全体的なシステム要求に従ってサイズが決定される前記付記のうちのいずれかに記載のGNSSプロセッサ。
付記22
追跡を容易にするために幾つかのTAP/DFTラインの組み合わせに関する一組のリアルタイム相関結果から成るコヒーレント相関結果を相関器チャネルのために前記プロセッサに渡す手段を含み、このリアルタイムのデータに加えて、プロンプトデータセットと呼ばれる履歴データセットが1つまたは複数のタップに関して提示され、これらのタップは、最も強い相関位相になるような形で前記拡散符号と整合されるようにするために選択される前記付記のうちのいずれかに記載のGNSSプロセッサ。
Claims (2)
- GNSSプロセッサであって、
(b1)1つまたは複数のチャネルから成る幾つかの信号に関する幾つかの相関値を生成するための複数の相関ブロックを含み、
(b2)各相関ブロックは、搬送波を除去し及びその結果得られた信号に前記信号の期待される特徴に対応する符号を乗じるための手段を含と、
(b3)各相関ブロックは、連続した符号位相範囲を網羅する1つまたは複数の出力をするタップを生成するためにイネーブルにされ、
(b4)前記タップのうちの1つまたは複数が、電力を節約するためにディスエーブルにされることができ、
(b5)タップ間隔を小さくすることまたはタップ間隔を大きくすることによって前記ブロック内の隣接タップ間における符号位相関係を調整するための手段と、
(b6)搬送波除去及び符号生成がマスタチャネルによって行われ、次に追加のスレーブチャネルを通されるように2つ以上のチャネルを鎖のようにつなげて連鎖するための手段、ここにおいて、前記マスタチャネルでは前記搬送波除去及び符号生成が行われ、前記スレーブチャネルでは2つ以上のチャネルを連鎖することで符号位相範囲が拡大され、前記スレーブチャネルにおける搬送波除去及び符号生成は、電力を節約するためにディスエーブルにすることができる、と、
を含む追跡モジュール、
を備える、GNSSプロセッサ。 - 前記信号の期待される特徴に対応する符号はゴールド符号を備える請求項1に記載のGNSSプロセッサ。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP07120808.6 | 2007-11-15 | ||
| EP07120808 | 2007-11-15 | ||
| PCT/EP2008/065578 WO2009063062A2 (en) | 2007-11-15 | 2008-11-14 | Gnns receiver and signal tracking circuit and system |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013015209A Division JP5868878B2 (ja) | 2007-11-15 | 2013-01-30 | Gnss受信機及び信号追跡回路及びシステム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2011504229A JP2011504229A (ja) | 2011-02-03 |
| JP2011504229A5 JP2011504229A5 (ja) | 2014-04-24 |
| JP5769971B2 true JP5769971B2 (ja) | 2015-08-26 |
Family
ID=40445399
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010533595A Expired - Fee Related JP5769971B2 (ja) | 2007-11-15 | 2008-11-14 | Gnss受信機及び信号追跡回路及びシステム |
| JP2013015209A Expired - Fee Related JP5868878B2 (ja) | 2007-11-15 | 2013-01-30 | Gnss受信機及び信号追跡回路及びシステム |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013015209A Expired - Fee Related JP5868878B2 (ja) | 2007-11-15 | 2013-01-30 | Gnss受信機及び信号追跡回路及びシステム |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US8390513B2 (ja) |
| EP (1) | EP2215491A2 (ja) |
| JP (2) | JP5769971B2 (ja) |
| KR (1) | KR101164749B1 (ja) |
| CN (2) | CN103698787B (ja) |
| WO (1) | WO2009063062A2 (ja) |
Families Citing this family (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8634993B2 (en) | 2003-03-20 | 2014-01-21 | Agjunction Llc | GNSS based control for dispensing material from vehicle |
| US8686900B2 (en) | 2003-03-20 | 2014-04-01 | Hemisphere GNSS, Inc. | Multi-antenna GNSS positioning method and system |
| US8265826B2 (en) | 2003-03-20 | 2012-09-11 | Hemisphere GPS, LLC | Combined GNSS gyroscope control system and method |
| US8190337B2 (en) | 2003-03-20 | 2012-05-29 | Hemisphere GPS, LLC | Satellite based vehicle guidance control in straight and contour modes |
| US8271194B2 (en) * | 2004-03-19 | 2012-09-18 | Hemisphere Gps Llc | Method and system using GNSS phase measurements for relative positioning |
| US8140223B2 (en) | 2003-03-20 | 2012-03-20 | Hemisphere Gps Llc | Multiple-antenna GNSS control system and method |
| US9002565B2 (en) | 2003-03-20 | 2015-04-07 | Agjunction Llc | GNSS and optical guidance and machine control |
| US8583315B2 (en) | 2004-03-19 | 2013-11-12 | Agjunction Llc | Multi-antenna GNSS control system and method |
| USRE48527E1 (en) | 2007-01-05 | 2021-04-20 | Agjunction Llc | Optical tracking vehicle control system and method |
| US8311696B2 (en) | 2009-07-17 | 2012-11-13 | Hemisphere Gps Llc | Optical tracking vehicle control system and method |
| US7808428B2 (en) | 2007-10-08 | 2010-10-05 | Hemisphere Gps Llc | GNSS receiver and external storage device system and GNSS data processing method |
| WO2009100463A1 (en) | 2008-02-10 | 2009-08-13 | Hemisphere Gps Llc | Visual, gnss and gyro autosteering control |
| WO2009126587A1 (en) | 2008-04-08 | 2009-10-15 | Hemisphere Gps Llc | Gnss-based mobile communication system and method |
| US8217833B2 (en) | 2008-12-11 | 2012-07-10 | Hemisphere Gps Llc | GNSS superband ASIC with simultaneous multi-frequency down conversion |
| US8401704B2 (en) | 2009-07-22 | 2013-03-19 | Hemisphere GPS, LLC | GNSS control system and method for irrigation and related applications |
| US8334804B2 (en) | 2009-09-04 | 2012-12-18 | Hemisphere Gps Llc | Multi-frequency GNSS receiver baseband DSP |
| US8649930B2 (en) | 2009-09-17 | 2014-02-11 | Agjunction Llc | GNSS integrated multi-sensor control system and method |
| US8548649B2 (en) | 2009-10-19 | 2013-10-01 | Agjunction Llc | GNSS optimized aircraft control system and method |
| US9331798B2 (en) * | 2010-01-08 | 2016-05-03 | Commscope Technologies Llc | System and method for mobile location by proximity detection |
| US9071342B1 (en) * | 2010-04-08 | 2015-06-30 | Marvell International Ltd. | Method and apparatus for correlating global positioning system (GPS) pseudorandom noise (PRN) codes |
| CN102540204B (zh) * | 2010-12-31 | 2014-10-29 | 杭州中科微电子有限公司 | 一种单芯片双频全球卫星导航接收机 |
| US9124356B2 (en) * | 2011-12-14 | 2015-09-01 | Northrop Grumman Guidance And Electronics Company, Inc. | Reconfigurable correlator for a navigation system |
| US20130167013A1 (en) * | 2011-12-23 | 2013-06-27 | Qnx Software Systems Limited | Method of presenting digital data on an electronic device operating under different environmental conditions |
| WO2016027727A1 (ja) * | 2014-08-20 | 2016-02-25 | ソニー株式会社 | 全地球航法衛星システムの受信装置および受信方法、並びにプログラム |
| US10802158B2 (en) * | 2015-09-30 | 2020-10-13 | Apple Inc. | Dynamic coherent integration |
| CN105680952B (zh) * | 2016-01-29 | 2018-01-26 | 北京邮电大学 | 一种信号跟踪方法及装置 |
| US9705560B1 (en) | 2016-03-23 | 2017-07-11 | Honeywell International Inc. | Discrete fourier transform using GNSS tracking channel |
| CN108627863B (zh) * | 2017-03-17 | 2021-10-29 | 展讯通信(上海)有限公司 | 基于dft的gnss导航电文数据解调方法、装置及gnss接收终端 |
| US10560254B1 (en) * | 2017-08-15 | 2020-02-11 | L3 Technologies Inc. | Picosecond LPD time alignment |
| US11333770B2 (en) | 2018-08-23 | 2022-05-17 | Samsung Electronics Co., Ltd | Detection and mitigation of false global navigation satellite system tracks in the presence of locally generated interference |
| EP4319138A4 (en) | 2021-05-13 | 2024-10-02 | Samsung Electronics Co Ltd | IMAGE PROVIDING METHOD AND ELECTRONIC DEVICE SUPPORTING SAME |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5347284A (en) * | 1991-02-28 | 1994-09-13 | Texas Instruments Incorporated | System and method for a digital navigation satellite receiver |
| US5799114A (en) * | 1993-05-05 | 1998-08-25 | Liberty Technologies, Inc. | System and method for stable analysis of sampled transients arbitrarily aligned with their sample points |
| US5600670A (en) * | 1994-12-21 | 1997-02-04 | Trimble Navigation, Ltd. | Dynamic channel allocation for GPS receivers |
| US6393046B1 (en) * | 1996-04-25 | 2002-05-21 | Sirf Technology, Inc. | Spread spectrum receiver with multi-bit correlator |
| ATE222000T1 (de) | 1996-04-25 | 2002-08-15 | Sirf Tech Inc | Spreizspektrumempfänger mit multibitkorrelation |
| EP0924532B1 (en) | 1997-11-19 | 2006-04-19 | IMEC vzw | Method and apparatus for receiving GPS/GLONASS signals |
| JP4149079B2 (ja) * | 1999-04-27 | 2008-09-10 | 古野電気株式会社 | 擬似雑音符号位相検出装置 |
| US6909736B2 (en) * | 2000-12-14 | 2005-06-21 | Nokia Corporation | System for method for fine acquisition of a spread spectrum signal |
| US7764726B2 (en) * | 2004-12-01 | 2010-07-27 | Qualomm Incorporated | Systems, methods, and apparatus for jammer rejection |
| US7486749B2 (en) * | 2004-12-22 | 2009-02-03 | Nokia Corporation | Determination of a code phase |
| US7298324B2 (en) * | 2005-06-03 | 2007-11-20 | Novatel, Inc. | Apparatus for and method of improving position and time estimation of radio location devices using calibrated pulse shapes |
| US8406277B2 (en) * | 2005-12-16 | 2013-03-26 | Qualcomm Incorporated | Signal processor and signal processing method |
| US9151846B2 (en) * | 2005-12-16 | 2015-10-06 | Qualcomm Incorporated | Signal processor and signal processing method |
| US7903719B2 (en) * | 2005-12-21 | 2011-03-08 | Qualcomm Incorporated | Optimal use of resources for signal processors |
| CN101051080B (zh) * | 2006-04-05 | 2010-05-12 | 中国科学院微电子研究所 | 一种高灵敏度的gps信号载波跟踪方法 |
| US7916075B2 (en) * | 2006-04-19 | 2011-03-29 | Mediatek Inc. | Satellite signal adaptive time-division multiplexing receiving device |
| US7474260B2 (en) * | 2006-04-19 | 2009-01-06 | Media Tek Inc. | Adjustable time-division multiplexing receiver for receiving satellite signal and method for the same |
-
2008
- 2008-11-14 EP EP08851019A patent/EP2215491A2/en not_active Ceased
- 2008-11-14 JP JP2010533595A patent/JP5769971B2/ja not_active Expired - Fee Related
- 2008-11-14 CN CN201310744344.9A patent/CN103698787B/zh not_active Expired - Fee Related
- 2008-11-14 CN CN200880123580.6A patent/CN101910858B/zh not_active Expired - Fee Related
- 2008-11-14 US US12/738,234 patent/US8390513B2/en active Active
- 2008-11-14 KR KR1020107013217A patent/KR101164749B1/ko active IP Right Grant
- 2008-11-14 WO PCT/EP2008/065578 patent/WO2009063062A2/en active Application Filing
-
2013
- 2013-01-30 JP JP2013015209A patent/JP5868878B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| KR20100089877A (ko) | 2010-08-12 |
| CN101910858A (zh) | 2010-12-08 |
| JP2011504229A (ja) | 2011-02-03 |
| US20100210206A1 (en) | 2010-08-19 |
| KR101164749B1 (ko) | 2012-07-12 |
| CN101910858B (zh) | 2014-02-12 |
| JP5868878B2 (ja) | 2016-02-24 |
| JP2013137316A (ja) | 2013-07-11 |
| CN103698787B (zh) | 2016-05-18 |
| CN103698787A (zh) | 2014-04-02 |
| WO2009063062A2 (en) | 2009-05-22 |
| EP2215491A2 (en) | 2010-08-11 |
| WO2009063062A3 (en) | 2009-07-30 |
| US8390513B2 (en) | 2013-03-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5769971B2 (ja) | Gnss受信機及び信号追跡回路及びシステム | |
| JP2011504229A5 (ja) | ||
| US8593345B2 (en) | Signal processing system for satellite positioning signals | |
| US8138972B2 (en) | Signal processing system for satellite positioning signals | |
| JP4674707B2 (ja) | スペクトラム拡散レシーバのアーキテクチャおよびその方法 | |
| US20230288574A1 (en) | Modernized global navigation satellite system (gnss) receivers and commercially viable consumer grade gnss receivers | |
| US8989326B2 (en) | Method and apparatus for software GPS receiver | |
| US8279910B2 (en) | Method and apparatus for code space search in a receiver | |
| US8362952B2 (en) | Memory reduction in GNSS receiver | |
| JP2006058297A (ja) | 最初に概略位置を知ることなしに無線周波数信号受信器の定位方法とその方法を実行する受信器 | |
| JP2003101422A (ja) | マルチパス信号の作用を訂正するための手段を備える無線周波数信号受信器、および受信器を作動させる方法 | |
| US7706431B2 (en) | System and method for providing optimized receiver architectures for combined pilot and data signal tracking | |
| JP2011501146A (ja) | 多相符号ジェネレータおよびgnss受信機 | |
| MX2008010827A (es) | Metodo y aparto para busqueda de espacio de codigo en un receptor. | |
| US7936846B2 (en) | Low gate count sequential multitap correlator | |
| JP2007124291A (ja) | 測位装置およびその制御方法 | |
| Mattos | Acquisition of the galileo oas l1b/c signal for the mass-market receiver | |
| EP1724600B1 (en) | A system and method for acquisition of signals | |
| TW202124994A (zh) | 現代化全球導航衛星系統接收器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120531 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120731 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20121031 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20121107 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130130 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20131029 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140228 |
|
| A524 | Written submission of copy of amendment under article 19 pct |
Free format text: JAPANESE INTERMEDIATE CODE: A524 Effective date: 20140228 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20140307 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20140530 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150422 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150624 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5769971 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |