JP5740397B2 - 電気機械式モーター - Google Patents
電気機械式モーター Download PDFInfo
- Publication number
- JP5740397B2 JP5740397B2 JP2012515363A JP2012515363A JP5740397B2 JP 5740397 B2 JP5740397 B2 JP 5740397B2 JP 2012515363 A JP2012515363 A JP 2012515363A JP 2012515363 A JP2012515363 A JP 2012515363A JP 5740397 B2 JP5740397 B2 JP 5740397B2
- Authority
- JP
- Japan
- Prior art keywords
- actuator
- interaction
- electromechanical
- electrical signal
- interaction part
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000003993 interaction Effects 0.000 claims description 78
- 239000000463 material Substances 0.000 claims description 28
- 230000008859 change Effects 0.000 claims description 14
- 238000000034 method Methods 0.000 claims description 10
- 230000004044 response Effects 0.000 claims description 9
- 238000006073 displacement reaction Methods 0.000 claims description 2
- 230000008021 deposition Effects 0.000 claims 1
- 230000008901 benefit Effects 0.000 description 9
- 210000004081 cilia Anatomy 0.000 description 9
- 230000001886 ciliary effect Effects 0.000 description 8
- 230000007246 mechanism Effects 0.000 description 8
- 238000005452 bending Methods 0.000 description 5
- 230000008602 contraction Effects 0.000 description 5
- 230000009471 action Effects 0.000 description 4
- 238000010586 diagram Methods 0.000 description 3
- 238000005336 cracking Methods 0.000 description 2
- 230000001419 dependent effect Effects 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 230000010363 phase shift Effects 0.000 description 2
- 229920000642 polymer Polymers 0.000 description 2
- 239000007787 solid Substances 0.000 description 2
- 230000003068 static effect Effects 0.000 description 2
- 230000001429 stepping effect Effects 0.000 description 2
- 239000004642 Polyimide Substances 0.000 description 1
- 239000000919 ceramic Substances 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 239000013078 crystal Substances 0.000 description 1
- 230000002950 deficient Effects 0.000 description 1
- 230000009977 dual effect Effects 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000005284 excitation Effects 0.000 description 1
- 229910002112 ferroelectric ceramic material Inorganic materials 0.000 description 1
- 239000000835 fiber Substances 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 238000013021 overheating Methods 0.000 description 1
- 229920001721 polyimide Polymers 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
Images








Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/02—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors
- H02N2/04—Constructional details
- H02N2/043—Mechanical transmission means, e.g. for stroke amplification
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/02—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors
- H02N2/021—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors using intermittent driving, e.g. step motors, piezoleg motors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/02—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors
- H02N2/04—Constructional details
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/02—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors
- H02N2/06—Drive circuits; Control arrangements or methods
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/02—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors
- H02N2/06—Drive circuits; Control arrangements or methods
- H02N2/062—Small signal circuits; Means for controlling position or derived quantities, e.g. for removing hysteresis
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N—ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N30/00—Piezoelectric or electrostrictive devices
- H10N30/20—Piezoelectric or electrostrictive devices with electrical input and mechanical output, e.g. functioning as actuators or vibrators
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N—ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N30/00—Piezoelectric or electrostrictive devices
- H10N30/20—Piezoelectric or electrostrictive devices with electrical input and mechanical output, e.g. functioning as actuators or vibrators
- H10N30/202—Piezoelectric or electrostrictive devices with electrical input and mechanical output, e.g. functioning as actuators or vibrators using longitudinal or thickness displacement combined with bending, shear or torsion displacement
- H10N30/2023—Piezoelectric or electrostrictive devices with electrical input and mechanical output, e.g. functioning as actuators or vibrators using longitudinal or thickness displacement combined with bending, shear or torsion displacement having polygonal or rectangular shape
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N—ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N30/00—Piezoelectric or electrostrictive devices
- H10N30/20—Piezoelectric or electrostrictive devices with electrical input and mechanical output, e.g. functioning as actuators or vibrators
- H10N30/204—Piezoelectric or electrostrictive devices with electrical input and mechanical output, e.g. functioning as actuators or vibrators using bending displacement, e.g. unimorph, bimorph or multimorph cantilever or membrane benders
- H10N30/2041—Beam type
- H10N30/2042—Cantilevers, i.e. having one fixed end
Description
Claims (6)
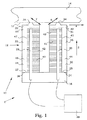
- アクチュエーターアセンブリ(12)と、
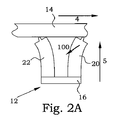
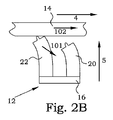
駆動方向(4)に変位を起こさせるように、該アクチュエーターアセンブリ(12)により作用される物体(14)とを有する電気機械式モーター(10)であって、
該アクチュエーターアセンブリ(12)は、アクチュエーター基台(16)と第一アクチュエーター(20)と第二アクチュエーター(22)とを有し、
該第一アクチュエーター(20)は、機械的に単一の取付部により取付けられ、
該第一アクチュエーター(20)の単一の取付部(24)は、該アクチュエーター基台(16)に対する第一の取付部(24)であり、該第一取付部(24)は、該第一アクチュエーター(20)の第一端(25)に設けられており、
該第一アクチュエーター(20)は、該第一アクチュエーター(20)の第二端(31)を成す第一の相互作用部(30)を有し、該第一アクチュエーター(20)の第二端(31)は、該第一アクチュエーター(20)の第一端(25)とアクチュエーター方向(5)において反対側にあり、
該第二アクチュエーター(22)は機械的に単一取付部により取付けられ、
該第二アクチュエーター(22)の単一の取付部は、該アクチュエーター基台(16)に対する第二の取付部(26)であり、該第二取付部(26)は、該第二アクチュエーター(22)の第一端(27)に設けられており、
該第二アクチュエーター(22)は、該第二アクチュエーター(22)の第二端(33)を成す第二の相互作用部(32)を有し、該第二アクチュエーター(22)の第二端(33)は、該第二アクチュエーター(22)の第一端(27)とアクチュエーター方向(5)において反対側にあり、
該アクチュエーター方向(5)は、駆動方向(4)と交差しており、
該第一相互作用部(30)と該第二相互作用部(32)は、夫々の接触エリヤ(34、35)により該物体(14)の相互作用面(13)と相互作用するように配置された電気機械式モーター(10)において、
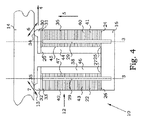
該第一アクチュエーター(20)と第二アクチュエーター(22)は、夫々が、該第一アクチュエーター(20)と第二アクチュエーター(22)の夫々の第一端(25,27)と該第二端(31、33)との間に配置された電気機械的材料を有する部材(36、38)を有しており、
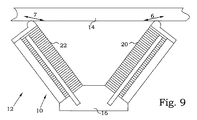
電気機械的材料を有する該部材(36,38)の各々が、夫々に加えられる単一の電気信号の応答として各接触エリヤ(34,35)の1次元の前後運動(6,7)を起こすように配置され、
該各1次元の前後運動(6,7)は該アクチュエーター方向(5)に対しても、該駆動方向(4)に対してもさらに互いに対しても交差するようにされ、
電気機械的材料を有する該部材(36,38)の各々が、これに加えられる単一の電気信号に応じて寸法変化を起こす能動体積部(40、42)と、該アクチュエーター方向に沿って該各能動体積部(40,42)に機械的に取付られた受動体積部(44、46)とを有しており、
該第一アクチュエーター(20)の能動体積部(40)は、該駆動方向(4)に見て、該第一アクチュエーター(20)の該受動体積部(44)の前方に位置しており、
該第二アクチュエーター(22)の能動体積部(42)は、該駆動方向(4)に見て、該第二アクチュエーター(22)の該受動体積部(46)の後方に位置しており、
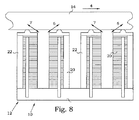
該第一相互作用部(30)と該第二相互作用部(32)が、これら相互作用部の各々が取付けられた該各アクチュエーター(20、22)の外に該駆動方向(4)に沿う方向に延出する延出部(37、39)を有し、
該第一相互作用部(30)と該第二相互作用部(32)の該それぞれの接触エリヤ(34、35)が、該延出部(37、39)に設けられ、
該第一相互作用部(30)の接触エリヤ(34)が、該駆動方向(4)と直交する交差方向(2)において該第二相互作用部(32)の接触エリヤ(35)と整合している
ことを特徴とする電気機械式モーター(10)。 - 該第一アクチュエーター(20)の能動体積部(40)と該第二アクチュエーター(22)の能動体積部(42)の少なくとも一つが、該能動体積部(40、42)を励起するために該能動体積部(40、42)に埋め込まれた電極(41、43)を有しており、
該電極(41,43)は、
該能動体積部(40、42)に取付けられた受動体積部(44、46)から離れる方に向かう能動体積部(40、42)の面(51)と
該能動体積部(40、42)の該駆動方向(4)に沿う面(50)のうちの少なくとも一つの外へ延びていることを特徴とする請求項1に記載の電気機械式モーター。 - 該電極(41、43)は、該受動体積部(44、46)の面に設けられた端末(29)に電気的に接続されていることを特徴とする請求項2に記載の電気機械式モーター。
- 該第一相互作用部(30)の接触エリヤ(34)と該第二相互作用部(32)の接触エリヤ(35)が、部分接触エリヤを有し、それらが互いに差しこまれていることを特徴とする請求項1〜3のいずれか一項に記載の電気機械式モーター。
- 請求項1ないし4のいずれかに一項に記載の電気機械式モーター(10)と、
該電気機械式モーター(10)に接続され、電気機械的材料を有する該部材(36,38)を励起するための少なくとも二つの異なる電気信号を与えるようにされた電源(99)とを有する電気機械式モーターシステム(1)。 - 物体(14)と相互作用するように配置された第一相互作用部(30)と第二相互作用部(32)とを有する電気機械式モーター(10)を駆動する方法であって、該方法は、
該第一相互作用部(30)に取付られた電気機械的材料を有する部材(36)を励起するための第一の電気信号を与えるステップ(210)と、
該第二相互作用部(32)に取付られた電気機械的材料を有する部材(38)を励起するための第二の電気信号を与えるステップ(212)とを有しており、
該第一の電気信号は該第二の電気信号と異なっており、
該第一の電気信号と該第二の電気信号は、駆動の間、該第一相互作用部(30)と該第二相互作用部(32)の少なくとも一つが該物体(14)と接触せしめる(218)ようにされ、
電気機械的材料を有する該部材(36、38)の各々が、これらに加えられる前記第一の及び第二の電気信号に応じて寸法変化を起こす能動体積部(40、42)と、該アクチュエーター方向(5)に沿って該各能動部(40、42)に機械的に取り付けられた受動堆積部(44、46)とを有しており、
該第一の電気信号は、該第一相互作用部(30)の電気機械的材料を有する該部材(36)が、該第一相互作用部(30)の接触エリヤ(34)を、駆動方向(4)と交差するが直交しない、第一の1次元の前後運動方向(6)に運動させ(214)、該駆動方向(4)は、該第一相互作用部(30)と該第二相互作用部(32)に対する物体(14)の所期の前進移動方向であり、
該第二の電気信号は、該第二相互作用部(32)の電気機械的材料を有する該部材(38)が、該第二相互作用部(30)の接触エリヤ(35)を、駆動方向(4)と交差する第二の1次元の前後運動方向(7)に運動させ(216)、該第二の1次元の前後運動方向(7)は、該第一の1次元の前後運動方向(6)と交差し、
該第一相互作用部(30)の接触エリヤ(34)が、該駆動方向(4)と直交する交差方向(2)において該第二相互作用部(32)の接触エリヤ(35)と整合している
ことを特徴とする、
電気機械式モーター(10)を駆動する方法。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/EP2009/057735 WO2010149199A1 (en) | 2009-06-22 | 2009-06-22 | Electromechanical motor |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012531177A JP2012531177A (ja) | 2012-12-06 |
| JP5740397B2 true JP5740397B2 (ja) | 2015-06-24 |
Family
ID=41666431
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012515363A Expired - Fee Related JP5740397B2 (ja) | 2009-06-22 | 2009-06-22 | 電気機械式モーター |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8912708B2 (ja) |
| JP (1) | JP5740397B2 (ja) |
| KR (1) | KR20120112354A (ja) |
| WO (1) | WO2010149199A1 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE112010006073T5 (de) * | 2010-12-20 | 2013-10-10 | Piezomotor Uppsala Ab | Elektromechanischer Motor |
| US10777730B2 (en) * | 2017-12-26 | 2020-09-15 | Santosh Kumar BEHERA | Scalable piezoelectric linear actuator |
| DE102018212897A1 (de) * | 2018-08-02 | 2020-02-06 | Zf Friedrichshafen Ag | Ziliares Verbindungselement |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4769570A (en) | 1986-04-07 | 1988-09-06 | Toshiba Ceramics Co., Ltd. | Piezo-electric device |
| JPH044775A (ja) * | 1990-04-20 | 1992-01-09 | Toyota Central Res & Dev Lab Inc | 物体の移動装置 |
| US6392329B1 (en) * | 1999-10-12 | 2002-05-21 | Face International Corp. | Piezoelectric vibrating apparatus |
| IL137206A0 (en) * | 1999-10-31 | 2001-07-24 | Nanomotion Ltd | Piezoelectric motors and motor driving configurations |
| US6307301B1 (en) * | 2000-02-02 | 2001-10-23 | The Boeing Company | Buckling resistant piezoelectric actuator |
| GB2369489B (en) * | 2000-11-23 | 2004-03-10 | Khaled Karrai | Inertial rotation device |
| JP3830027B2 (ja) * | 2001-08-23 | 2006-10-04 | セイコーエプソン株式会社 | ワイヤーアクチュエータ |
| US6798117B2 (en) * | 2002-07-10 | 2004-09-28 | Piezomotor Uppsala Ab | Fine control of electromechanical motors |
| US7061158B2 (en) * | 2002-07-25 | 2006-06-13 | Nanomotion Ltd. | High resolution piezoelectric motor |
| JP4062692B2 (ja) * | 2003-03-13 | 2008-03-19 | 東レエンジニアリング株式会社 | ウォーキング動作駆動ユニットおよびそれを用いたアライメント装置 |
| JP4723199B2 (ja) * | 2003-06-19 | 2011-07-13 | 日本碍子株式会社 | 筒形圧電アクチュエータ並びに筒形圧電アクチュエータアレイ及び製造方法 |
| JP4393180B2 (ja) * | 2003-12-15 | 2010-01-06 | Thk株式会社 | 一軸アクチュエータ |
| CN101040393A (zh) * | 2004-02-25 | 2007-09-19 | 微动力有限公司 | 多向压电马达结构 |
| JP2006332616A (ja) * | 2005-04-28 | 2006-12-07 | Brother Ind Ltd | 圧電アクチュエータの製造方法 |
| JP3824627B1 (ja) | 2005-11-24 | 2006-09-20 | 株式会社キンセイ産業 | 廃アスベストの溶融処理方法 |
| US7420321B2 (en) * | 2006-03-03 | 2008-09-02 | Piezomotor Uppsala Ab | Heat efficient micromotor |
| US7355325B2 (en) * | 2006-06-15 | 2008-04-08 | Piezomotor Uppsala Ab | Wide frequency range electromechanical actuator |
-
2009
- 2009-06-22 WO PCT/EP2009/057735 patent/WO2010149199A1/en not_active Ceased
- 2009-06-22 JP JP2012515363A patent/JP5740397B2/ja not_active Expired - Fee Related
- 2009-06-22 US US13/379,415 patent/US8912708B2/en not_active Expired - Fee Related
- 2009-06-22 KR KR1020127001437A patent/KR20120112354A/ko not_active Ceased
Also Published As
| Publication number | Publication date |
|---|---|
| US20120098468A1 (en) | 2012-04-26 |
| US8912708B2 (en) | 2014-12-16 |
| JP2012531177A (ja) | 2012-12-06 |
| KR20120112354A (ko) | 2012-10-11 |
| WO2010149199A1 (en) | 2010-12-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5114476B2 (ja) | 広周波数域電気機械式アクチュエータ | |
| US6747394B2 (en) | Near-resonance electromechanical motor | |
| US6967430B2 (en) | Flat resonating electromechanical drive unit | |
| US7157830B2 (en) | Near-resonance wide-range operating electromechanical motor | |
| KR20110083600A (ko) | 반-공진 구동 시스템들 및 이의 방법 | |
| JP4452275B2 (ja) | 圧電電気機械式駆動装置 | |
| JP4188967B2 (ja) | 変位拡大手段を有する圧電線形モータ | |
| KR100559199B1 (ko) | 이중 전기기계 요소 | |
| JP5740397B2 (ja) | 電気機械式モーター | |
| US7161278B2 (en) | Peristaltic electromechanical actuator | |
| US20110227454A1 (en) | Vibrator in vibration type driving apparatus and manufacturing method thereof | |
| US20140210311A1 (en) | Noiseless Electromechanical Motor | |
| WO2012041370A1 (en) | Electromechanical actuator | |
| JP3892183B2 (ja) | 圧電アクチュエータ | |
| JP2005102369A (ja) | 駆動装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130903 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131125 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140507 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20140728 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20140804 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141030 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150407 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150427 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5740397 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |