JP5653055B2 - 眼科装置及びその制御方法 - Google Patents
眼科装置及びその制御方法 Download PDFInfo
- Publication number
- JP5653055B2 JP5653055B2 JP2010056557A JP2010056557A JP5653055B2 JP 5653055 B2 JP5653055 B2 JP 5653055B2 JP 2010056557 A JP2010056557 A JP 2010056557A JP 2010056557 A JP2010056557 A JP 2010056557A JP 5653055 B2 JP5653055 B2 JP 5653055B2
- Authority
- JP
- Japan
- Prior art keywords
- fundus
- image
- eye
- movement
- region
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images














Description
なお、以下の実施例では本発明を単一の装置に応用した例を記載するが、本発明の対象は下記の構成に限定されることはなく、また、下記の構成を備える単一の装置に限定されることはない。本発明は、下記の機能を実現するための方法の使用及び、これらの機能を実現するソフトウェア(コンピュータプログラム)を、ネットワーク又は各種記憶媒体を介してシステム或いは装置に供給し、そのシステム或いは装置のコンピュータ(またはCPUやMPU等)がプログラムを読み出して実行する処理によっても実現される。
以下、本発明の実施例1について説明する。
本実施例では、上記説明した課題を解決するために、眼底画像の特徴点を抽出する際、抽出領域を指定する事で、眼球運動を計測する例について述べる。
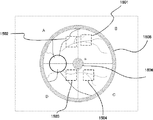
眼底画像取得に眼底カメラを用いた。図1に眼底カメラの概略図を示す。眼底カメラ本体部1には、信号取得部としてビデオレートで撮像可能なデジタル一眼レフカメラ50が接続部40を介し接続されている。被検眼Eと対向する対物レンズ11の光路上には、孔あきミラー12が設けられている。孔あきミラー12の入射方向の光路上には、リレーレンズ13、黒点板14、リレーレンズ15、リングスリット板16、蛍光エキサイタフィルタ17、ミラー18が配列されている。更に、ミラー18の入射方向には、コンデンサレンズ19、キセノン管から成る撮影用光源20、コンデンサレンズ21、赤外発光ダイオードから成る観察用光源22が配置されている。尚、図上における光路は点線で示している。
図3に機能体系を示す。機能体系は、システム全体を制御するCPU303、眼底画像取得部を制御する制御部305、眼底画像を取得するカメラ部301、システム状態を表示する表示部302、眼底画像や撮像条件等を記録するHDD(記録部)304、により構成されている。眼底の観察時及び撮影時には、CPU303より制御部305に撮像条件が指令され、眼底が撮像される。眼底が撮像された後、カメラ部301からCPU303に画像が送られ、画像処理等がなされた後、表示部302で表示され、同時又はその後、記録部304に保存される。
取得した眼底画像に対して以上の各処理を行った具体例を図2に示す。上述した眼底カメラ1を用い、10Hzの周期で、直径10mmの眼底画像を取得する測定条件で10秒間眼底を追尾計測する。
以下、本発明の実施例2について説明する。
実施例2では、眼底撮像取得にSLO(Scanning Laser Opthalmoscope)を用い、SLO眼底画像から実施例1と同様の方法により眼球運動の計測を行い、眼球運動の計測結果を眼底断層像撮像(OCT:Optical Coherent Tomography)装置にリアルタイムにフィードバックする事で高精細な立体のOCT画像を取得した例について述べる。
眼科装置としてOCT装置を用いた。OCTの構成概要に関して、図7を用いて説明する。
低コヒーレント光源715は、SLD光源(Super Luminescent Diode)や、ASE光源(Amplified Spontaneous Emission)が好適に用いることができる。低コヒーレント光の好適な波長は、850nm近傍および1050nm近傍の波長が眼底撮影には好適に用いられる。本実施例では、中心波長840nm、波長半値幅45nmのSLD光源を用いる。低コヒーレント光源から照射される低コヒーレント光がファイバーを経由して、ファイバカプラー710に入り、計測光OCTビームとも言う)と参照光に分けられる。ここではファイバを用いた干渉計構成を記載しているが、空間光光学系でビームスプリッタを用いた構成としてもかまわない。
ファイバカプラ710で戻ってきた計測光および参照光が合波され、ファイバコリメータ711に導かれる。ここでは合波された光を干渉光と呼ぶ。ファイバコリメータ711、グレーティング712、レンズ713、ラインセンサ714によって、分光器が構成されている。干渉光は、分光器によって、波長毎の強度情報となって計測される。ラインセンサ714によって計測された波長毎の強度情報は、不図示のPCに転送され、被検眼eの断層画像として生成される。
次に眼底画像を取得するSLO撮影部の光学構成を同じく図7を用いて説明する。レーザ光源729は、半導体レーザやSLD光源が好適に用いることができる。用いる波長は、波長分離手段によってOCT用の低コヒーレント光源の波長と分離できる光源であれば制約はないが、眼底観察像の画質として、700nm〜1000nmの近赤外の波長域が好適に用いられる。本実施例においては、波長760nmの半導体レーザを用いる。
本実施例では、被検眼eに注視させることで固視微動を安定させる内部固視灯を有している。本実施例が有する内部固視灯について、OCT装置、SLO装置同様、図7を用い説明する。固視灯に用いる光源752は発光ダイオード(LD)を用いた。発光ダイオードの点灯位置を、PCの制御により撮像したい部位に合わせて変更する。発光ダイオード752は500nmの波長で、光源から出射されたビームは、レンズ751とダイクロイックミラー750を経由し、被検眼eに照射される。ダイクロイックミラー750は、スキャンレンズ702と接眼レンズ701の間に位置し、短波長(500nm程度)の光とOCTビーム,SLOビーム(700nm以上)を波長分離する。
図8に本実施例で用いられる機能体系を示す。その機能体系は、システム全体を制御するCPU801、SLO装置、OCT装置及び固視灯を制御する各々の制御部802、803、808、SLO画像及びOCT画像を取得する各々のラインセンサカメラ部804、805、システム状態を表示するPCの表示部806、眼底画像や撮像条件等を記録するPCの記録部807、により構成されている。眼底の撮影時には、CPU801より制御部802、803に各々の撮像条件が指令され、眼底が撮像される。眼底が撮像された後、カメラ部804、805からCPU801に画像が送られ、CPU801にて画像処理された後、表示部806で表示され、同時又はその後、記録部807に保存される。
内部固視灯を有した装置で健常眼を測定した際に取得したSLO画像に対し以上の各処理を行った具体例を図13に示す。L-SLOは眼底位置での画像の大きさは、ライン幅10mm、スキャン範囲10mm、つまり、10mm×10mmである。SLO画像は30Hzで取得できる。OCT画像を取得する際の条件は、上述したSD―OCTを用い、カメラを70k A−scanで動作させ、B―scan画像(眼底スキャン範囲10mm、レーザスポット径20μm)は1000lineで構成され、B―scan280枚、網膜の立体画像を取得する。計測時間は4秒となる。
実施例1、2において、マスク領域を設定する領域は画像の周辺部には限定されず、例えば取得した第1の眼底画像の中心部に設定することもできる。
このとき、マスク領域は画像の中心部にのみ設定してもよいし、画像の周辺部と中心部との双方に設定してもよい。
実施例1、2では血管のテンプレートを用いて抽出したが、黄斑や乳頭をテンプレートとして用いても同様の効果が得られる。眼底画像は、眼底カメラ、走査レーザ検眼鏡(SLO)を用い画像を取得していたが、実施例に記載したもの以外の装置を用い眼底画像を取得しても良い。更に、視野検査を行う視野検査装置などでも同様の効果が得られる。
実施形態で示したフローの順序はこれに限定されるものではなく、順序が異なっていたり、又は、その他のフローによっても、テンプレート抽出時にマスク領域を設定する事で同様の効果が得られる。
50:デジタル一眼レフカメラ
202:マスク領域
403:マスク領域設定
1301:マスク領域
Claims (27)
- 被検眼の複数の眼底画像を異なる時間に取得する画像取得手段と、
前記取得された複数の眼底画像のうち少なくとも1つにおいて、眼球の動きを示す範囲に基づいて、部分領域を決定する決定手段と、
前記少なくとも1つの眼底画像のうち、前記決定された部分領域とは異なる他の領域から少なくとも1つの特徴領域の抽出を行う処理手段と、
前記少なくとも1つの特徴領域を用いて、前記被検眼の動きを測定する手段と
を有することを特徴とする眼科装置。 - 前記処理手段は、
前記決定された部分領域とは異なる他の領域から特徴領域を抽出する抽出手段と、
前記取得された複数の眼底画像のうち前記特徴領域が抽出された眼底画像以外の少なくとも1つの眼底画像から、前記抽出された特徴領域に対応する領域を探索する探索手段と、
を有することを特徴とする請求項1に記載の眼科装置。 - 前記決定手段は、前記複数の眼底画像のうち少なくとも1つの、前記眼底画像の画像周辺部から画像の中心方向に一定の幅を持つ領域以外の領域、及び/又は、前記眼底画像の中心から一定の幅を持つ領域以外の領域を、前記部分領域とは異なる他の領域と決定することを特徴とする請求項1または2に記載の眼科装置。
- 前記処理手段は、前記複数の眼底画像のうち少なくとも1つから特徴領域を抽出する抽出手段を有し、前記処理手段はさらに、前記複数の眼底画像のうち、その他の少なくとも1つの眼底画像から前記抽出された特徴領域と類似する画像を探索する探索手段を有することを特徴とする請求項1〜3のいずれか1項に記載の眼科装置。
- 前記一定の幅は、被検眼が測定時間内に動く距離よりも長いことを特徴とする請求項3に記載の眼科装置。
- さらに、被検眼の固視微動に関する情報を得る手段を有し、前記決定手段は、前記一定の幅を、前記得られた固視微動に関する情報に基づいて決定する請求項3または5に記載の眼科装置。
- 前記固視微動に関する情報は、外部固視、内部固視、患眼及び健常者、年齢、すべての眼底画像を撮像する時間並びに1枚の眼底画像を撮像する時間から選ばれる撮像条件に基づいて求められることを特徴とする請求項6に記載の眼科装置。
- 前記固視微動に関する情報は、1枚の眼底画像を撮像する時間に基づいて定められることを特徴とする請求項6または7に記載の眼科装置。
- 前記画像取得手段は、走査手段を介して前記被検眼に照射された測定光による戻り光に基づいて前記複数の眼底画像を取得し、
前記画像取得手段は前記複数の眼底画像における位置ずれに基づいて前記走査手段を制御する制御手段を有することを特徴とする請求項1〜8のいずれか1項に記載の眼科装置。 - 前記処理、前記測定、前記制御、及び前記取得はこの順番で行われることを特徴とする請求項9に記載の眼科装置。
- 前記決定手段は前記部分領域とは異なる他の領域に複数の領域を決定し、
前記処理手段は前記複数の領域のそれぞれから複数の特徴領域を抽出することを特徴とすることを特徴とする請求項1〜10のいずれか1項に記載の眼科装置。 - 被検眼の複数の眼底画像を異なる時間に取得する画像取得手段と、
前記取得された複数の眼底画像のうち少なくとも1つにおいて眼球の動きを示す範囲に基づいて決定された部分領域とは異なる他の領域から、少なくとも1つの特徴領域の抽出を行う処理手段と、
前記少なくとも1つの特徴領域を用いて、前記被検眼の動きを測定する手段と、
を有することを特徴とする眼科装置。 - 前記少なくとも1つの特徴領域は血管の分岐及び交差のうち少なくとも1つの画像を含むことを特徴とする請求項1〜12のいずれか1項に記載の眼科装置。
- 被検眼の複数の眼底画像を異なる時間に取得する画像取得手段と、
眼球の動きの量に基づいて前記複数の眼底画像のうち少なくとも1つに部分領域を決定する決定手段と、
前記複数の眼底画像のうち少なくとも2つの眼底画像における前記部分領域とは異なる他の領域から特徴領域を抽出し、前記抽出された特徴領域の間の座標の差を計算する、処理手段と、
前記処理の結果に基づいて前記被検眼の動きを測定する手段と、
を有することを特徴とする眼科装置。 - 前記画像取得手段は、眼底カメラ、走査レーザ検眼鏡、光干渉断層撮像装置、又は視野検査装置のいずれかを含むことを特徴とする請求項1〜14のいずれか1項に記載の眼科装置。
- 前記複数の眼底画像は複数のSLO画像を含み、
前記眼科装置は前記SLO画像のそれぞれに対応する複数のOCT画像を取得する手段を有することを特徴とする請求項1〜15のいずれか1項に記載の眼科装置。 - 前記眼球の動きの量は、撮像条件から求められることを特徴とする請求項1〜16のいずれか1項に記載の眼科装置。
- 前記眼球の動きの量は、撮像時間から求められることを特徴とする請求項1〜16のいずれか1項に記載の眼科装置。
- 前記眼球の動きの量は、眼底画像の取得レートから求められることを特徴とする請求項1〜16のいずれか1項に記載の眼科装置。
- コンピュータを、請求項1〜19のいずれか1項に記載の眼科装置として機能させるためのコンピュータプログラム。
- 被検眼の複数の眼底画像を異なる時間に取得する工程と、
前記取得された複数の眼底画像のうち少なくとも1つにおいて、眼球の動きを示す範囲に基づいて、部分領域を決定する工程と、
前記少なくとも1つの眼底画像のうち、前記決定された部分領域とは異なる他の領域から少なくとも1つの特徴領域の抽出を行う工程と、
前記少なくとも1つの特徴領域を用いて、前記被検眼の動きを測定する工程と、
を含むことを特徴とする被検眼の動きを測定する方法。 - 被検眼の複数の眼底画像を異なる時間に取得する工程と、
前記取得された複数の眼底画像のうち少なくとも1つにおいて眼球の動きを示す範囲に基づいて決定された部分領域とは異なる他の領域から、少なくとも1つの特徴領域の抽出を行う工程と、
前記少なくとも1つの特徴領域を用いて、前記被検眼の動きを測定する工程と、
を含むことを特徴とする被検眼の動きを測定する方法。 - 被検眼の複数の眼底画像を異なる時間に取得する工程と、
眼球の動きの量に基づいて前記複数の眼底画像のうち少なくとも1つに部分領域を決定する工程と、
前記複数の眼底画像のうち少なくとも2つの眼底画像における前記部分領域とは異なる他の領域から特徴領域を抽出する工程、及び前記抽出された特徴領域の間の座標の差を計算する工程、を含む処理をする工程と、
前記処理の結果に基づいて前記被検眼の動きを測定する工程と、
を含むことを特徴とする被検眼の動きを測定する方法。 - 前記処理をする工程は、前記取得された複数の眼底画像のうち、その他の少なくとも1つの眼底画像から前記抽出された少なくとも1つの特徴領域と類似する画像を探索する工程を有することを特徴とする請求項23に記載の方法。
- 前記処理をする工程は前記複数の眼底画像から少なくとも1つの特徴領域を抽出する工程を含み、
前記処理をする工程はさらに、前記取得された複数の眼底画像のうち、その他の少なくとも1つの眼底画像から前記抽出された少なくとも1つの特徴領域と類似する画像を探索する工程を有することを特徴とする請求項23に記載の方法。 - 前記処理をする工程は、前記取得された複数の眼底画像のうち、その他の少なくとも1つの眼底画像の前記部分領域を除いた領域から前記抽出された少なくとも1つの特徴領域と類似する画像を探索する工程を含むことを特徴とする請求項23に記載の方法。
- 請求項21乃至26のいずれか1項に記載の方法の各工程をコンピュータに実行させることを特徴とするプログラム。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010056557A JP5653055B2 (ja) | 2010-03-12 | 2010-03-12 | 眼科装置及びその制御方法 |
| PCT/JP2011/055872 WO2011111851A1 (en) | 2010-03-12 | 2011-03-08 | Ophthalmologic apparatus and control method for the same |
| CN201180013700.9A CN103096785B (zh) | 2010-03-12 | 2011-03-08 | 眼科设备及其控制方法 |
| US13/581,675 US8998412B2 (en) | 2010-03-12 | 2011-03-08 | Ophthalmologic apparatus and control method for the same |
| US14/628,420 US9468374B2 (en) | 2010-03-12 | 2015-02-23 | Ophthalmologic apparatus and control method for the same |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010056557A JP5653055B2 (ja) | 2010-03-12 | 2010-03-12 | 眼科装置及びその制御方法 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014234236A Division JP5931163B2 (ja) | 2014-11-19 | 2014-11-19 | 眼科装置及び被検眼の動きを測定する方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2011188946A JP2011188946A (ja) | 2011-09-29 |
| JP2011188946A5 JP2011188946A5 (ja) | 2013-12-05 |
| JP5653055B2 true JP5653055B2 (ja) | 2015-01-14 |
Family
ID=44794517
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010056557A Expired - Fee Related JP5653055B2 (ja) | 2010-03-12 | 2010-03-12 | 眼科装置及びその制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5653055B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5818409B2 (ja) * | 2010-06-17 | 2015-11-18 | キヤノン株式会社 | 眼底撮像装置及びその制御方法 |
| JP6927715B2 (ja) * | 2017-03-03 | 2021-09-01 | 株式会社トプコン | 眼科画像表示装置、眼科画像表示方法及びプログラム |
| CN111629652A (zh) * | 2018-04-18 | 2020-09-04 | 卡尔蔡司医疗技术公司 | 改善oct中基于lso的跟踪的后处理方法 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4346991A (en) * | 1979-10-31 | 1982-08-31 | National Research Development Corporation | Method and apparatus for measuring retinal blood flow |
| DE3638226A1 (de) * | 1986-11-08 | 1988-05-11 | Rodenstock Instr | Vorrichtung zur beobachtung der hinteren augenabschnitte |
| US4856891A (en) * | 1987-02-17 | 1989-08-15 | Eye Research Institute Of Retina Foundation | Eye fundus tracker/stabilizer |
| DE3922471A1 (de) * | 1988-10-08 | 1991-01-17 | Rodenstock Instr | Vorrichtung zur gesichtsfeldpruefung |
| US5106184A (en) * | 1990-08-13 | 1992-04-21 | Eye Research Institute Of Retina Foundation | Retinal laser doppler apparatus having eye tracking system |
| JPH07163534A (ja) * | 1993-12-14 | 1995-06-27 | Canon Inc | 眼底血流速度測定方法及び測定装置 |
| JPH08206079A (ja) * | 1995-01-31 | 1996-08-13 | Canon Inc | 眼科装置 |
| JP3636533B2 (ja) * | 1996-03-11 | 2005-04-06 | キヤノン株式会社 | 眼科診断装置 |
| JP2008104628A (ja) * | 2006-10-25 | 2008-05-08 | Tokyo Institute Of Technology | 眼球の結膜強膜撮像装置 |
| JP5688491B2 (ja) * | 2007-11-05 | 2015-03-25 | オプトス・ピーエルシー | 視力検査を行う方法 |
-
2010
- 2010-03-12 JP JP2010056557A patent/JP5653055B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2011188946A (ja) | 2011-09-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9468374B2 (en) | Ophthalmologic apparatus and control method for the same | |
| JP5818409B2 (ja) | 眼底撮像装置及びその制御方法 | |
| JP5901124B2 (ja) | 撮像装置およびその制御方法 | |
| CN102525403B (zh) | 眼科设备及其控制方法 | |
| JP6367563B2 (ja) | 眼科装置 | |
| JP2012196439A (ja) | 撮像装置及び撮像方法 | |
| JP6899632B2 (ja) | 眼科撮影装置 | |
| JP6411728B2 (ja) | 眼科観察装置 | |
| JP2019155003A (ja) | 眼科装置、及びその制御方法 | |
| JP6633468B2 (ja) | 血流計測装置 | |
| JP2018051391A (ja) | 眼科装置 | |
| JP5858603B2 (ja) | 眼科装置及びその制御方法 | |
| JP5653055B2 (ja) | 眼科装置及びその制御方法 | |
| JP5931163B2 (ja) | 眼科装置及び被検眼の動きを測定する方法 | |
| JP7384987B2 (ja) | 眼科装置 | |
| JP7117873B2 (ja) | 眼科装置 | |
| JP2017158867A (ja) | 眼科撮影装置 | |
| JP2019155002A (ja) | 眼科装置、及びその制御方法 | |
| WO2011111851A1 (en) | Ophthalmologic apparatus and control method for the same | |
| JP2018023818A (ja) | 眼科観察装置 | |
| JP2018023816A (ja) | 眼科観察装置 | |
| JP2018051340A (ja) | 眼科装置 | |
| JP6404431B2 (ja) | 眼科観察装置 | |
| JP6310589B2 (ja) | 眼科装置 | |
| JP2022044645A (ja) | 眼科装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20120727 |
|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20120730 |
|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20120731 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20120831 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130311 |
|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20130701 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131021 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140206 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140402 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20141021 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20141118 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5653055 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |