JP5609585B2 - Pll回路、pll回路の誤差補償方法及び通信装置 - Google Patents
Pll回路、pll回路の誤差補償方法及び通信装置 Download PDFInfo
- Publication number
- JP5609585B2 JP5609585B2 JP2010262781A JP2010262781A JP5609585B2 JP 5609585 B2 JP5609585 B2 JP 5609585B2 JP 2010262781 A JP2010262781 A JP 2010262781A JP 2010262781 A JP2010262781 A JP 2010262781A JP 5609585 B2 JP5609585 B2 JP 5609585B2
- Authority
- JP
- Japan
- Prior art keywords
- clock
- circuit
- output
- oscillation circuit
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000000034 method Methods 0.000 title claims description 18
- 238000004891 communication Methods 0.000 title claims description 7
- 238000012937 correction Methods 0.000 claims description 88
- 230000010355 oscillation Effects 0.000 claims description 79
- 238000004364 calculation method Methods 0.000 claims description 71
- 230000001186 cumulative effect Effects 0.000 claims description 52
- 230000000630 rising effect Effects 0.000 claims description 43
- 238000001514 detection method Methods 0.000 claims description 27
- 238000006243 chemical reaction Methods 0.000 description 19
- 230000000737 periodic effect Effects 0.000 description 17
- 238000010586 diagram Methods 0.000 description 15
- 238000004088 simulation Methods 0.000 description 9
- 230000004913 activation Effects 0.000 description 6
- 230000005540 biological transmission Effects 0.000 description 6
- 238000012545 processing Methods 0.000 description 6
- 101100219315 Arabidopsis thaliana CYP83A1 gene Proteins 0.000 description 3
- 101000806846 Homo sapiens DNA-(apurinic or apyrimidinic site) endonuclease Proteins 0.000 description 3
- 101000835083 Homo sapiens Tissue factor pathway inhibitor 2 Proteins 0.000 description 3
- 101100269674 Mus musculus Alyref2 gene Proteins 0.000 description 3
- 101100140580 Saccharomyces cerevisiae (strain ATCC 204508 / S288c) REF2 gene Proteins 0.000 description 3
- 102100026134 Tissue factor pathway inhibitor 2 Human genes 0.000 description 3
- 238000009825 accumulation Methods 0.000 description 2
- 230000003213 activating effect Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 238000004590 computer program Methods 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 229920000729 poly(L-lysine) polymer Polymers 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 230000001960 triggered effect Effects 0.000 description 1
Images
















Classifications
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03L—AUTOMATIC CONTROL, STARTING, SYNCHRONISATION OR STABILISATION OF GENERATORS OF ELECTRONIC OSCILLATIONS OR PULSES
- H03L7/00—Automatic control of frequency or phase; Synchronisation
- H03L7/06—Automatic control of frequency or phase; Synchronisation using a reference signal applied to a frequency- or phase-locked loop
- H03L7/16—Indirect frequency synthesis, i.e. generating a desired one of a number of predetermined frequencies using a frequency- or phase-locked loop
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03L—AUTOMATIC CONTROL, STARTING, SYNCHRONISATION OR STABILISATION OF GENERATORS OF ELECTRONIC OSCILLATIONS OR PULSES
- H03L2207/00—Indexing scheme relating to automatic control of frequency or phase and to synchronisation
- H03L2207/50—All digital phase-locked loop
Landscapes
- Stabilization Of Oscillater, Synchronisation, Frequency Synthesizers (AREA)
Description
<1.従来のPLL回路の問題点>
<2.第1の実施形態>
[2−1.補正値の算出]
[2−2.PLL回路の構成]
[2−3.補正値算出部の構成]
[2−4.シミュレーション結果]
<3.第2の実施形態>
[3−1.PLL回路の構成]
[3−2.アクティベート回路の機能構成]
<4.第3の実施形態>
[4−1.補正値算出部の構成]
[4−2.位相比較処理]
<5.PLL回路を備える無線端末装置>
<6.まとめ>
デジタル制御発振器(DCO)の出力クロックの累積クロック数の小数部の検出に用いるTDC回路の分解能は半導体プロセスに依存したある有限な分解能を有する。図12及び図13は、一般的なTDC回路の構成を示す説明図である。以下、図12及び図13を用いて一般的なTDC回路の構成について説明する。

[2−1.補正値の算出]
図1は、本発明の第1の実施形態にかかる、デジタル制御発振器を持つPLL回路に用いられるTDC回路の有限な分解能により発生する周期性誤差を保証する際の補正値の算出について示す説明図である。以下、図1を用いて周期性誤差を保証する際の補正値の算出について説明する。
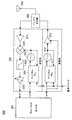
図2は、本発明の第1の実施形態にかかるPLL回路100の構成を示す説明図である。以下、図2を用いて本発明の第1の実施形態にかかるPLL回路100の構成について説明する。
図3は、本発明の第1の実施形態にかかるPLL回路100に含まれる補正値算出部109の構成を示す説明図である。以下、図3を用いて本発明の第1の実施形態にかかるPLL回路100に含まれる補正値算出部109の構成について説明する。
図4Aは、図14のPLLのビヘイビアモデルを使って、本発明の第1の実施形態にかかるPLL回路100による補正値を加味しないシミュレーション結果をグラフで示す説明図である。図4Bは、図14のPLLのビヘイビアモデルを使って、本発明の第1の実施形態にかかるPLL回路100による補正値を加味したシミュレーション結果をグラフで示す説明図である。ここで、分周比N=100.001、基準クロック周波数fREF=26MHz、TDC回路に用いる遅延素子の遅延量Δt=7.5ps、可変利得回路の利得G1=1/27である。
[3−1.PLL回路の構成]
次に、本発明の第2の実施形態について説明する。図5は、本発明の第2の実施形態にかかるPLL回路100’の構成を示す説明図である。図2との説明の重複を避けるために、図2に示したPLL回路100との差分につき説明を加える。
図6は、本発明の第2の実施形態にかかるPLL回路100’に含まれるアクティベート部119の構成を示す説明図である。上述したように、アクティベート部119は、補正機能をオンまたはオフする、すなわち、補正値算出部109をオンまたはオフする制御信号を生成するものである。
[4−1.補正値算出部の構成]
次に、本発明の第3の実施形態について説明する。図7は、本発明の第3の実施形態に含まれるPLL回路に含まれる補正値算出部109’の構成を示す説明図である。以下、図7を用いて本発明の第3の実施形態にかかるPLL回路に含まれる補正値算出部109’の構成について説明する
図9A及び図9Bは、本発明の第3の実施形態にかかるPLL回路に含まれる補正値算出部109’による位相比較処理を示す説明図である。
次に、本発明の上記各実施形態にかかるPLL回路を備える無線端末装置について説明する。図10は、本発明の上記各実施形態にかかるPLL回路を備える無線端末装置200の構成について説明する説明図である。以下、図10を用いて無線端末装置200の構成について説明する。
以上説明したように本発明の各実施形態にかかるPLL回路によれば、補正値を算出して、累積クロック数の小数部にその補正値を加算することで、TDC回路の有限な分解能に起因して発生する、周期性誤差の影響を低減させることができる。また本発明の第2の実施形態にかかるPLL回路によれば、TDC回路の周期性誤差の影響が顕著となる条件下において補正値の加算を行うことで、TDC回路の周期性誤差の影響が少ない条件では、演算量の低減が可能になる。
102 第1の累積加算器
103 第1の基準クロック
104 第2の累積加算器
105 発振回路
106 TDC回路
107 小数部算出回路
108 第1の加算器
109 補正値算出部
110 リタイミング回路
111 第1のフリップフロップ
112 第2の加算器
113 第3の加算器
114 第2のフリップフロップ
115 可変利得回路
116 データ変換回路
117 乗算器
118 収束検出回路
119 アクティベート部
121 周期検出回路
122 加算器
123 第1の遅延回路
124 第1の比較回路
125 カウンター回路
126 フリップフロップ
127 第2の遅延回路
128 補正値算出回路
129 第2の比較回路
130 スイッチ
141 分周比
142 第1の乗算器
143 第1の基準クロックの周波数値
144 第2の乗算器
145 Δtの見積もり値
146 第3の乗算器
147 設定分周比の整数部
148 設定分周比の小数部
149 設定分周比の小数部の逆数
150 加算器
151 可変利得回路の利得
152 第4の乗算器
153 第5の乗算器
154 比較回路
155 補正機能をオンにする制御信号
156 補正機能をオフにする制御信号
Claims (17)
- 発振回路の累積クロック数をデジタル値として検出する累積クロック数検出部であって、該累積クロック数検出部のうち、前記累積クロック数の小数部を検出する部分が有限な分解能である累積クロック数検出部と、
前記発振回路の累積クロック数の小数部のデジタル値の、第1の基準クロックを基準とする周期性を検出する周期検出部と、
前記発振回路の出力クロックの1周期のデジタル値、前記発振回路の累積クロック数の小数部が持つ周期性の1周期のデジタル値、および前記発振回路の累積クロック数の小数部が持つ周期性の各周期の開始点から前記第1の基準クロックの数をカウントした値から補正値を算出する補正値算出部と、
前記周期性の各周期の開始点から前記第1の基準クロックの周期で、前記累積クロック数の小数部に前記補正値を加算する加算部と、
を備える、PLL回路。 - 前記累積クロック数検出部は、前記発振回路の累積クロック数の小数部を検出するTDC回路を含む、請求項1に記載のPLL回路。
- 前記加算部による前記補正値の加算の有無を切り替える切替部をさらに備え、
前記切替部は、分周比、前記TDC回路の分解能、前記累積クロック数の小数部が持つ周期性の1周期のデジタル値およびループ帯域を制御する定数との関係に基づいて、前記加算部による前記補正値の加算の有無の切り替えを制御する、請求項2に記載のPLL回路。 - PLLの収束状態を検出する収束検出部をさらに備え、
前記収束検出部は、設定された任意の収束状態に達した後に前記加算部による前記補正値の加算の有無の切り替えを制御する、請求項1に記載のPLL回路。 - 前記第1の基準クロックを前記発振回路の出力クロックまたは該出力クロックを分周したクロックでリタイミングするリタイミング部をさらに備え、
前記累積クロック数検出部は、前記リタイミング部が前記第1の基準クロックをリタイミングして得られるクロックを第2の基準クロックとして用い、発振回路の累積クロック数の整数部の出力を前記第2の基準クロックの立ち上がりエッジのタイミングで保持する、請求項1に記載のPLL回路。 - 前記リタイミング部が、リタイミングするエッジとして立ち上がりエッジを用いた場合には、前記累積クロック数検出部は、前記第1の基準クロックの立ち上がりエッジと前記発振回路の出力クロックまたは該出力クロックを分周したクロックの立ち上がりエッジ間の時間差のデジタル値の周期性を検出する、請求項5に記載のPLL回路。
- 前記リタイミング部が、リタイミングするエッジとして立ち下がりエッジを用いた場合には、前記累積クロック数検出部は、前記第1の基準クロックの立ち上がりエッジと前記発振回路の出力クロックまたは該出力クロックを分周したクロックの立ち下がりエッジ間の時間差のデジタル値の周期性を検出する、請求項5に記載のPLL回路。
- デジタル値で表示された分周比を前記第1の基準クロック毎に累積加算して得られる値から、前記第2の基準クロックの立ち上がりエッジのタイミングで保持された前記発振回路の累積クロック数の整数部のデジタル値および前記発振回路の累積クロック数の小数部のデジタル値を減じる演算を行う位相比較器をさらに備える、請求項5に記載のPLL回路。
- 前記リタイミング部が、リタイミングするエッジとして立ち上がりエッジを用いた場合には、前記位相比較器は、前記発振回路の累積クロックの小数部として、前記累積クロック数検出部の出力のうち前記第1の基準クロックの立ち上がりエッジと前記発振回路の出力クロックまたは該出力クロックを分周したクロックの立ち上がりエッジ間の時間差のデジタル値から算出される小数部を用いる、請求項8に記載のPLL回路。
- 前記リタイミング部が、リタイミングするエッジとして立ち下がりエッジを用いた場合には、前記位相比較器は、前記発振回路の累積クロックの小数部として、前記累積クロック数検出部の出力のうち前記第1の基準クロックの立ち上がりエッジと前記発振回路の出力クロックまたは該出力クロックを分周したクロックの立ち下がりエッジ間の時間差のデジタル値から算出される小数部を用いる、請求項8に記載のPLL回路。
- 発振回路の累積クロック数をデジタル値として検出する累積クロック数検出ステップであり、該累積クロック数検出ステップのうち、前記累積クロック数の小数部を検出するステップが有限な分解能である累積クロック数検出ステップと、
前記発振回路の累積クロック数の小数部のデジタル値の、第1の基準クロックを基準とする周期性を検出する周期検出ステップと、
前記発振回路の出力クロックの1周期のデジタル値、前記発振回路の累積クロック数の小数部が持つ周期性の1周期のデジタル値、および前記発振回路の累積クロック数の小数部が持つ周期性の各周期の開始点から前記第1の基準クロックの数をカウントした値から補正値を算出する補正値算出ステップと、
前記周期性の各周期の開始点から前記第1の基準クロックの周期で、前記累積クロック数の小数部に前記補正値を加算する加算ステップと、
を備える、PLL回路の誤差補償方法。 - 請求項1に記載のPLL回路を備える、通信装置。
- クロックを出力するクロック出力部と、
前記クロック出力部からの累積クロック数をデジタル値として検出する第1検出部であって、該第1検出部のうち、前記累積クロック数の小数部を検出する部分が有限な分解能である第1検出部と、
前記累積クロック数の小数部のデジタル値の、第1の基準クロックを基準とする周期性を検出する第2検出部と、
前記クロック出力部からの出力クロックの1周期のデジタル値、前記累積クロック数の小数部が持つ周期性の1周期のデジタル値、および前記クロック出力部からの累積クロック数の小数部が持つ周期性の各周期の開始点から前記第1の基準クロックの数をカウントした値から補正値を算出する算出部と、
前記周期性の各周期の開始点から前記第1の基準クロックの周期で、前記累積クロック数の小数部に前記補正値を加算する加算部と、
を備える、回路。 - 前記クロック出力部は、発振回路を備える、請求項13に記載の回路。
- 前記クロック出力部は、発振回路である、請求項13に記載の回路。
- 前記回路は、少なくともPLL回路の一部である、請求項13に記載の回路。
- 前記回路は、PLL回路である、請求項13に記載の回路。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010262781A JP5609585B2 (ja) | 2010-11-25 | 2010-11-25 | Pll回路、pll回路の誤差補償方法及び通信装置 |
| US13/282,841 US8575980B2 (en) | 2010-11-25 | 2011-10-27 | PLL circuit, error correcting method for the same, and communication apparatus including the same |
| CN2011103925960A CN102480290A (zh) | 2010-11-25 | 2011-11-18 | 锁相环电路、其误差校正方法和包括该电路的通信设备 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010262781A JP5609585B2 (ja) | 2010-11-25 | 2010-11-25 | Pll回路、pll回路の誤差補償方法及び通信装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2012114736A JP2012114736A (ja) | 2012-06-14 |
| JP2012114736A5 JP2012114736A5 (ja) | 2014-01-16 |
| JP5609585B2 true JP5609585B2 (ja) | 2014-10-22 |
Family
ID=46092796
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010262781A Expired - Fee Related JP5609585B2 (ja) | 2010-11-25 | 2010-11-25 | Pll回路、pll回路の誤差補償方法及び通信装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US8575980B2 (ja) |
| JP (1) | JP5609585B2 (ja) |
| CN (1) | CN102480290A (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5609585B2 (ja) * | 2010-11-25 | 2014-10-22 | ソニー株式会社 | Pll回路、pll回路の誤差補償方法及び通信装置 |
| US8508266B2 (en) * | 2011-06-30 | 2013-08-13 | Broadcom Corporation | Digital phase locked loop circuits with multiple digital feedback loops |
| JP2013258622A (ja) * | 2012-06-14 | 2013-12-26 | Renesas Electronics Corp | ダウンコンバータ及びその制御方法 |
| US9225348B2 (en) * | 2014-01-10 | 2015-12-29 | International Business Machines Corporation | Prediction based digital control for fractional-N PLLs |
| WO2016063700A1 (ja) * | 2014-10-22 | 2016-04-28 | ソニー株式会社 | 位相同期回路および周波数シンセサイザ |
| JP6862900B2 (ja) * | 2017-02-22 | 2021-04-21 | セイコーエプソン株式会社 | 回路装置、物理量測定装置、電子機器及び移動体 |
| JP2021027496A (ja) * | 2019-08-07 | 2021-02-22 | セイコーエプソン株式会社 | 回路装置、物理量測定装置、電子機器及び移動体 |
| WO2022133925A1 (zh) * | 2020-12-24 | 2022-06-30 | 深圳市中承科技有限公司 | 压控振荡器频率校准装置、方法及存储介质 |
| CN113114237B (zh) * | 2021-03-03 | 2022-08-23 | 浙江大学 | 一种能够实现快速频率锁定的环路系统 |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6429693B1 (en) * | 2000-06-30 | 2002-08-06 | Texas Instruments Incorporated | Digital fractional phase detector |
| KR100852180B1 (ko) * | 2006-11-24 | 2008-08-13 | 삼성전자주식회사 | 타임투디지털컨버터 |
| US7978111B2 (en) * | 2008-03-03 | 2011-07-12 | Qualcomm Incorporated | High resolution time-to-digital converter |
| JP4883031B2 (ja) * | 2008-03-18 | 2012-02-22 | パナソニック株式会社 | 受信装置と、これを用いた電子機器 |
| JP2010028600A (ja) * | 2008-07-23 | 2010-02-04 | Sony Corp | Tdc回路、pll回路、並びに無線通信装置 |
| US7974807B2 (en) * | 2008-09-18 | 2011-07-05 | Qualcomm Incorporated | Adaptive calibration for digital phase-locked loops |
| EP2396887A4 (en) * | 2009-02-13 | 2012-08-29 | Freescale Semiconductor Inc | INTEGRATED CIRCUIT COMPRISING A FREQUENCY GENERATION CIRCUITRY FOR CONTROLLING A FREQUENCY SOURCE |
| US8076960B2 (en) * | 2009-04-29 | 2011-12-13 | Qualcomm Incorporated | Digital phase-locked loop with two-point modulation using an accumulator and a phase-to-digital converter |
| WO2011001652A1 (ja) * | 2009-07-02 | 2011-01-06 | 三洋電機株式会社 | Pll回路、およびそれを搭載した無線通信装置 |
| JP2011205328A (ja) * | 2010-03-25 | 2011-10-13 | Toshiba Corp | 局部発振器 |
| JP2012060395A (ja) * | 2010-09-08 | 2012-03-22 | Panasonic Corp | Pll周波数シンセサイザ |
| JP5609585B2 (ja) * | 2010-11-25 | 2014-10-22 | ソニー株式会社 | Pll回路、pll回路の誤差補償方法及び通信装置 |
| US8207770B1 (en) * | 2010-12-23 | 2012-06-26 | Intel Corporation | Digital phase lock loop |
| KR101737808B1 (ko) * | 2010-12-23 | 2017-05-19 | 연세대학교 산학협력단 | 동작 환경에 둔감한 지터 특성을 가지는 디지털 위상고정루프 |
| KR101695311B1 (ko) * | 2010-12-23 | 2017-01-11 | 한국전자통신연구원 | 아날로그 위상에러 보상기를 장착한 프랙셔널 디지털 위상고정루프 |
| US8476945B2 (en) * | 2011-03-23 | 2013-07-02 | International Business Machines Corporation | Phase profile generator |
| US8508266B2 (en) * | 2011-06-30 | 2013-08-13 | Broadcom Corporation | Digital phase locked loop circuits with multiple digital feedback loops |
| US8390349B1 (en) * | 2012-06-26 | 2013-03-05 | Intel Corporation | Sub-picosecond resolution segmented re-circulating stochastic time-to-digital converter |
-
2010
- 2010-11-25 JP JP2010262781A patent/JP5609585B2/ja not_active Expired - Fee Related
-
2011
- 2011-10-27 US US13/282,841 patent/US8575980B2/en active Active
- 2011-11-18 CN CN2011103925960A patent/CN102480290A/zh active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| US8575980B2 (en) | 2013-11-05 |
| US20120133401A1 (en) | 2012-05-31 |
| JP2012114736A (ja) | 2012-06-14 |
| CN102480290A (zh) | 2012-05-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5609585B2 (ja) | Pll回路、pll回路の誤差補償方法及び通信装置 | |
| JP5307291B2 (ja) | アキュムレータおよび位相デジタル変換器を使用する2ポイント変調のデジタル位相同期ループ | |
| EP3701631B1 (en) | Digital-to-time converter (dtc) assisted all digital phase locked loop (adpll) circuit | |
| US9306586B2 (en) | Methods and devices for implementing all-digital phase locked loop | |
| JP5684076B2 (ja) | アナログデジタル変換器及び無線受信機 | |
| JP5347534B2 (ja) | 位相比較器、pll回路、及び位相比較器の制御方法 | |
| US20100260242A1 (en) | Time digital converter, digital pll frequency synthesizer, transceiver, and receiver | |
| US7994867B2 (en) | Oscillator control apparatus | |
| JP2011205328A (ja) | 局部発振器 | |
| US8536911B1 (en) | PLL circuit, method of controlling PLL circuit, and digital circuit | |
| JP2010237172A (ja) | Fmcw信号生成回路 | |
| US20120025879A1 (en) | Pll circuit, method for operating pll circuit and system | |
| JP5206682B2 (ja) | 位相比較器およびフェーズロックドループ | |
| JP2007526700A (ja) | 分数周波数シンセサイザ | |
| WO2011161737A1 (ja) | デジタル位相差検出器およびそれを備えた周波数シンセサイザ | |
| JP2011205338A (ja) | 局部発振器 | |
| US7505542B1 (en) | Low jitter digital frequency synthesizer with frequency modulation capabilities | |
| WO2021219205A1 (en) | Time to digital converter calibration | |
| JPWO2010047005A1 (ja) | デジタルpll回路及び通信装置 | |
| JP2010028600A (ja) | Tdc回路、pll回路、並びに無線通信装置 | |
| US7948285B2 (en) | PLL circuit, radio terminal device and control method of PLL circuit | |
| JP2010141519A (ja) | 位相同期回路、および通信装置 | |
| JP2009177259A (ja) | Pll回路、無線端末装置、および周波数検出方法 | |
| JP2018074312A (ja) | 周波数検出器及びクロックデータリカバリ装置 | |
| TWI774485B (zh) | 全數位鎖相迴路及其校正方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131122 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20131122 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140411 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140520 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140714 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140805 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140818 |
|
| LAPS | Cancellation because of no payment of annual fees |