JP5574762B2 - モータの制御装置 - Google Patents
モータの制御装置 Download PDFInfo
- Publication number
- JP5574762B2 JP5574762B2 JP2010048670A JP2010048670A JP5574762B2 JP 5574762 B2 JP5574762 B2 JP 5574762B2 JP 2010048670 A JP2010048670 A JP 2010048670A JP 2010048670 A JP2010048670 A JP 2010048670A JP 5574762 B2 JP5574762 B2 JP 5574762B2
- Authority
- JP
- Japan
- Prior art keywords
- motor
- speed
- command
- npk
- torque
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Description
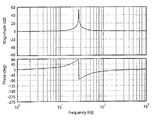
但し式においては、ωnpkは固有周波数であり、ζpkは減衰係数であり、gdは分母分子の減衰係数の比である。この伝達関数では、固有周波数ωnpk でノッチの中心周波数を、減衰係数ζpk でノッチの幅を、分母分子の減衰係数の比gdでノッチの深さが調整できる。そしてgd >1である。このような伝達関数を用いると、逆ノッチ特性(共振ピーク特性)の幅と高さを調整することができる。
但し式においては、ωnpkは固有周波数であり、ζpkは減衰係数であり、gdは分母分子の減衰係数の比である。この伝達関数では、固有周波数ωnpk でノッチの中心周波数を、減衰係数ζpk でノッチの幅を、分母分子の減衰係数の比gdでノッチの深さが調整できる。
2 速度検出器
3 エンコーダ
4 速度制御器
5 位置制御器
6 トルク制御器
7 ピークフィルタ
Claims (5)
- 制御対象を駆動するモータの速度と速度指令により指令された指令速度との偏差を、速度制御器に通して得たトルク指令をトルク制御器に与えて前記モータのトルクを制御するモータの制御方法であって、
前記トルク指令を、前記モータを設置している機台と前記制御対象との間で発生する機台振動中の反共振周波数成分のみを増幅し、該反共振周波数成分の周波数で前記制御対象が反共振特性をもたない剛体システムのようになるように伝達関数が定められたピークフィルタに通して前記トルク制御器に与えることを特徴とするモータの制御方法。 - 前記伝達関数が、
Gpk =(s2 + gd・2ζpkωnpk・s + ωnpk 2)/(s2 + 2ζpkωnpk・s + ωnpk 2)
で表され、但しωnpkは固有周波数であり、ζpkは減衰係数であり、gdは分母分子の減衰係数の比であり、gd >1であることを特徴とする請求項1に記載のモータの制御方法。 - 機台に設置されて制御対象を駆動するモータの可動子の位置と位置指令との偏差を入力として速度指令を出力する位置制御器と、
前記モータの速度と速度指令により指令された指令速度との偏差を入力としてトルク指令を出力する速度制御器と、
前記トルク指令を入力としてモータのトルクを制御するトルク制御器とを備えてなるモータの制御装置であって、
前記速度制御器と前記トルク制御器との間に、前記トルク指令をフィルタ処理するピークフィルタが配置されており、
前記ピークフィルタは、前記モータを設置している機台と前記制御対象との間で発生する機台振動中の反共振周波数成分のみを増幅し、該反共振周波数成分の周波数で前記制御対象が反共振特性をもたない剛体システムのようになるように伝達関数が定められていることを特徴とするモータの制御装置。 - 前記ピークフィルタは、前記モータを設置している機台と前記制御対象との間で発生する機台振動中の反共振周波数成分を増幅させることにより、前記機台振動を抑制するように伝達関数が定められていることを特徴とする請求項3に記載のモータの制御装置。
- 前記伝達関数が、
Gpk =(s2 + gd・2ζpkωnpk・s + ωnpk 2)/(s2 + 2ζpkωnpk・s + ωnpk 2)
で表され、但しωnpkは固有周波数であり、ζpkは減衰係数であり、gdは分母分子の減衰係数の比であり、gd >1であることを特徴とする請求項4に記載のモータの制御装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010048670A JP5574762B2 (ja) | 2010-03-05 | 2010-03-05 | モータの制御装置 |
| TW100104892A TWI508425B (zh) | 2010-03-05 | 2011-02-15 | 馬達之控制方法及馬達之控制裝置 |
| CN201110057114.6A CN102195545B (zh) | 2010-03-05 | 2011-03-03 | 电动机的控制装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010048670A JP5574762B2 (ja) | 2010-03-05 | 2010-03-05 | モータの制御装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2011188571A JP2011188571A (ja) | 2011-09-22 |
| JP2011188571A5 JP2011188571A5 (ja) | 2013-02-28 |
| JP5574762B2 true JP5574762B2 (ja) | 2014-08-20 |
Family
ID=44603064
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010048670A Active JP5574762B2 (ja) | 2010-03-05 | 2010-03-05 | モータの制御装置 |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP5574762B2 (ja) |
| CN (1) | CN102195545B (ja) |
| TW (1) | TWI508425B (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102570956B (zh) * | 2012-02-17 | 2014-08-20 | 南京国电环保设备有限公司 | 一种基于谐振抑制的直流电机控制方法 |
| JP5657633B2 (ja) * | 2012-12-14 | 2015-01-21 | ファナック株式会社 | 移動体が反転するときの位置誤差を補正するサーボ制御装置 |
| JP6041762B2 (ja) * | 2013-07-09 | 2016-12-14 | 山洋電気株式会社 | モータ制御装置 |
| JP6342747B2 (ja) * | 2014-08-22 | 2018-06-13 | 株式会社デンソー | 回転電機の制御装置 |
| JP6154435B2 (ja) * | 2015-07-09 | 2017-06-28 | ファナック株式会社 | 制御系のオンライン自動調整状況を表示する機能を有するサーボ制御装置 |
| CN108153242A (zh) * | 2017-12-23 | 2018-06-12 | 西安交通大学 | 一种进给系统伺服控制器及其控制方法和参数设置方法 |
| CN110798084A (zh) * | 2019-11-01 | 2020-02-14 | 四川英杰电气股份有限公司 | 一种直流电源单元控制检测系统与方法 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000092882A (ja) * | 1998-09-18 | 2000-03-31 | Yaskawa Electric Corp | 2慣性系の位置制御装置 |
| JP4664576B2 (ja) * | 2001-03-30 | 2011-04-06 | 三菱電機株式会社 | サーボ制御装置 |
| JP4391218B2 (ja) * | 2003-02-20 | 2009-12-24 | 三菱電機株式会社 | サーボ制御装置 |
| JP2005108162A (ja) * | 2003-09-12 | 2005-04-21 | Ricoh Co Ltd | サーボ制御装置 |
| JP2007336705A (ja) * | 2006-06-15 | 2007-12-27 | Fanuc Ltd | モータ制御装置 |
| JP2009303432A (ja) * | 2008-06-17 | 2009-12-24 | Hitachi Industrial Equipment Systems Co Ltd | モータによる位置制御装置 |
-
2010
- 2010-03-05 JP JP2010048670A patent/JP5574762B2/ja active Active
-
2011
- 2011-02-15 TW TW100104892A patent/TWI508425B/zh active
- 2011-03-03 CN CN201110057114.6A patent/CN102195545B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN102195545B (zh) | 2015-02-25 |
| TWI508425B (zh) | 2015-11-11 |
| TW201212519A (en) | 2012-03-16 |
| JP2011188571A (ja) | 2011-09-22 |
| CN102195545A (zh) | 2011-09-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5574762B2 (ja) | モータの制御装置 | |
| JP2011188571A5 (ja) | ||
| JP4540727B2 (ja) | モータ制御装置 | |
| JP4879173B2 (ja) | 電動機制御装置 | |
| JP4391218B2 (ja) | サーボ制御装置 | |
| JP3899526B2 (ja) | 位置制御装置 | |
| JP4685071B2 (ja) | モータ制御装置及びモータ制御方法 | |
| JP6046182B2 (ja) | 振動を抑制する機能を備えたモータ制御装置 | |
| WO2017154476A1 (ja) | モータ制御装置 | |
| JP3900219B2 (ja) | 電動機速度制御装置および同装置のゲイン設定方法 | |
| CN107769627B (zh) | 电动机控制装置、电动机控制方法及计算机可读记录介质 | |
| JP5989694B2 (ja) | 制御装置、制御方法及び制御プログラム | |
| TWI565217B (zh) | Motor control device (1) | |
| JP6604157B2 (ja) | 多慣性共振システムにおける共振抑制制御装置 | |
| JP6490368B2 (ja) | 工作機械制御装置、工作機械制御方法、及びプログラム | |
| TWI710199B (zh) | 狀態觀測器兼用型全閉合控制的諧波齒輪裝置之致動器的定位控制裝置 | |
| JP4658181B2 (ja) | サーボ制御装置 | |
| JP6474460B2 (ja) | モータ制御装置 | |
| JP6846213B2 (ja) | モータ制御装置 | |
| JPWO2019138825A1 (ja) | 電動機の制御装置 | |
| US20200376620A1 (en) | Motor control device and industrial machine for suppressing vibration | |
| JP2016190305A (ja) | 位置決め装置のパラメータ設定方法、及びパラメータ設定装置、並びにこのパラメータ設定装置を備えた位置決め装置 | |
| JP5125283B2 (ja) | 電動機の制御装置および電動機の制御プログラム | |
| TWI711775B (zh) | 具備h∞控制的諧波齒輪裝置的致動器之定位控制裝置 | |
| WO2002082194A1 (fr) | Dispositif de commande asservie |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130110 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130110 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140116 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140121 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140312 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140401 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140603 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140701 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5574762 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |