JP5570866B2 - 画像処理装置、画像処理装置の作動方法、および画像処理プログラム - Google Patents
画像処理装置、画像処理装置の作動方法、および画像処理プログラム Download PDFInfo
- Publication number
- JP5570866B2 JP5570866B2 JP2010105755A JP2010105755A JP5570866B2 JP 5570866 B2 JP5570866 B2 JP 5570866B2 JP 2010105755 A JP2010105755 A JP 2010105755A JP 2010105755 A JP2010105755 A JP 2010105755A JP 5570866 B2 JP5570866 B2 JP 5570866B2
- Authority
- JP
- Japan
- Prior art keywords
- region
- closed region
- unit
- energy
- image
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







































Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/0002—Inspection of images, e.g. flaw detection
- G06T7/0012—Biomedical image inspection
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/10—Segmentation; Edge detection
- G06T7/12—Edge-based segmentation
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/10—Segmentation; Edge detection
- G06T7/149—Segmentation; Edge detection involving deformable models, e.g. active contour models
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/10—Segmentation; Edge detection
- G06T7/187—Segmentation; Edge detection involving region growing; involving region merging; involving connected component labelling
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10024—Color image
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10068—Endoscopic image
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20021—Dividing image into blocks, subimages or windows
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20112—Image segmentation details
- G06T2207/20116—Active contour; Active surface; Snakes
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30004—Biomedical image processing
- G06T2207/30028—Colon; Small intestine
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30004—Biomedical image processing
- G06T2207/30092—Stomach; Gastric
Description
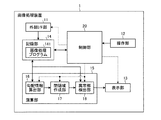
先ず、実施の形態1の画像処理装置について説明する。図1は、実施の形態1の画像処理装置1の機能構成例を説明するブロック図である。また、図2は、演算部15を構成する勾配情報算出部16の構成例を説明するブロック図であり、図3は、閉領域作成部17の構成例を説明するブロック図であり、図4は、異常部検出部18の構成例を説明するブロック図である。なお、図1〜図4の各図中において、画像処理装置1の各部間を接続して画像信号等のデータ信号を伝送するデータ信号線を実線で示し、制御信号を伝送する制御信号線を破線で示している。
線エッジ上の画素の場合、H(x,y)=1 ・・・(1)
線エッジ上以外の画素の場合、H(x,y)=0 ・・・(2)

次に、実施の形態2について説明する。図21は、実施の形態2の画像処理装置1bの機能構成を説明するブロック図である。なお、図21において、実施の形態1で説明した構成と同一の構成については、同一の符号を付する。また、図22は、演算部15bを構成する閉領域作成部19bの構成例を説明するブロック図である。図21に示すように、画像処理装置1bは、外部I/F部11と、操作部12と、表示部13と、記録部14bと、演算部15bと、画像処理装置1b全体の動作を制御する制御部20とを備える。
11 外部I/F部
12 操作部
13 表示部
14,14b 記録部
141,141b 画像処理プログラム
15,15b 演算部
16 勾配情報算出部
161 特定波長画像抽出部
162 勾配強度算出部
17,19b 閉領域作成部
171 分割部
172 線エッジ検出部
173 基点検出部
174 分割線作成部
175 統合部
176 領域情報算出部
177 領域統合部
178 統合制御部
191 初期閉領域作成部
192 第1のエネルギー算出部
193 閉領域更新部
194 更新部
195 第2のエネルギー算出部
196 修正部
197 閉領域更新制御部
18 異常部検出部
181 基準色推定部
182 異常色部検出部
20 制御部
Claims (15)
- 管腔内画像から異常部を検出する画像処理装置であって、
前記管腔内画像の画素値をもとに、各画素の勾配情報を算出する勾配情報算出手段と、
前記勾配情報をもとに、勾配の強度が所定の値以上である画素を領域の内部に含まず、かつ、領域の境界が該領域の内側に所定の曲率以上で屈曲しないことを条件として該条件を満たす閉領域を作成する閉領域作成手段と、
前記閉領域の内部から異常部を検出する異常部検出手段と、
を備えることを特徴とする画像処理装置。 - 前記閉領域作成手段は、
前記勾配情報をもとに、前記管腔内画像を複数の領域に分割する分割手段と、
前記複数の領域それぞれの特徴量をもとに、統合後の領域の境界が該統合後の領域の内側に所定の曲率以上で屈曲しない条件で前記複数の領域を統合する統合手段と、
を備え、前記統合手段による統合後の領域を閉領域とすることを特徴とする請求項1に記載の画像処理装置。 - 前記分割手段は、
前記勾配情報をもとに線エッジを検出する線エッジ検出手段と、
前記線エッジの端点と、前記線エッジが所定の値以上の曲率で屈曲する屈曲点とを検出して分割線の基点とする基点検出手段と、
前記基点から異なる2つの方向へ線エッジまたは画像の縁とあたるまで分割線を引く分割線作成手段と、
を備え、前記線エッジと前記分割線とで囲まれた領域のそれぞれを前記複数の領域とすることを請求項2に記載の画像処理装置。 - 前記統合手段は、
前記複数の領域それぞれの前記特徴量として、前記領域の形状特徴量、および前記領域と隣接している他の領域との境界の長さを含む領域情報を算出する領域情報算出手段と、
前記領域情報をもとに統合対象とする領域を選択し、該選択した領域を統合する領域統合手段と、
前記領域情報算出手段および前記領域統合手段による処理の繰り返しを制御し、前記統合対象とする領域が存在しなくなった場合に前記繰り返しを終了する統合制御手段と、
を備えることを特徴とする請求項2に記載の画像処理装置。 - 前記閉領域作成手段は、
前記勾配情報をもとに前記閉領域の初期形状を作成する初期閉領域作成手段と、
前記閉領域の境界が滑らかなほど小さい値を返す内部エネルギー、前記閉領域の境界における前記勾配の強度が大きいほど小さい値を返す画像エネルギー、および前記閉領域の大きさが大きいほど小さい値を返す外部エネルギーのうちの少なくとも2つのエネルギーの加重和を第1のエネルギーとして算出する第1のエネルギー算出手段と、
前記閉領域の初期形状を基準とし、前記第1のエネルギーが小さくなる方向へ前記閉領域の形状を更新する閉領域更新手段と、
を備えることを特徴とする請求項1に記載の画像処理装置。 - 前記初期閉領域作成手段は、周囲と比較して相対的に勾配の強度が小さい位置に前記閉領域の初期形状を作成することを特徴とする請求項5に記載の画像処理装置。
- 前記初期閉領域作成手段は、他の閉領域と重ならないように前記閉領域の初期形状を作成することを特徴とする請求項6に記載の画像処理装置。
- 前記初期閉領域作成手段は、他の閉領域と一部が重なるように前記閉領域の初期形状を作成し、該閉領域について前記第1のエネルギーを算出した結果、該算出した前記第1のエネルギーの値が所定の値を超える場合に、前記他の閉領域と重ならないように前記閉領域の初期形状を修正することを特徴とする請求項6に記載の画像処理装置。
- 前記閉領域更新手段は、
前記閉領域の形状を更新する更新手段と、
更新後の閉領域について、該更新後の閉領域の境界が滑らかなほど小さい値を返す内部エネルギー、前記更新後の閉領域の境界における勾配の強度が大きいほど小さい値を返す画像エネルギー、前記更新後の閉領域の大きさが大きいほど小さい値を返す外部エネルギーのうちの少なくとも2つのエネルギーの加重和を第2のエネルギーとして算出する第2のエネルギー算出手段と、
前記第1のエネルギーと前記第2のエネルギーとを比較し、前記第1のエネルギーが小さい場合には前記更新後の閉領域の形状を更新前の閉領域の形状に修正し、前記第2のエネルギーが小さい場合には前記第1のエネルギーを前記第2のエネルギーで更新する修正手段と、
前記更新手段、前記第2のエネルギー算出手段、および前記修正手段による処理の繰り返しを制御し、前記第1のエネルギーが変化しなくなった場合に前記繰り返しを終了する閉領域更新制御手段と、
を備えることを特徴とする請求項5に記載の画像処理装置。 - 前記管腔内画像は、複数の波長成分で構成され、
前記勾配情報算出手段は、
前記管腔内画像から、生体内における吸収または散乱の度合いに応じて特定される特定波長成分の画像を抽出する特定波長画像抽出手段と、
前記特定波長成分の画像をもとに、各画素の画素値の勾配強度を算出する勾配強度算出手段と、
を備え、前記勾配強度を前記勾配情報とすることを特徴とする請求項1に記載の画像処理装置。 - 前記異常部検出手段は、
前記閉領域毎に、正常な生体組織を示す基準色を推定する基準色推定手段と、
前記閉領域毎に、前記基準色から所定の値以上外れた色特徴量を持つ領域を異常色部として検出する異常色部検出手段と、
を備え、前記異常色部を異常部とすることを特徴とする請求項1に記載の画像処理装置。 - 前記基準色推定手段は、モルフォロジフィルタを用いて前記基準色を推定することを特徴とする請求項11に記載の画像処理装置。
- 前記異常色部検出手段は、前記閉領域の内部の画素値と前記基準色との差分値をもとに前記異常色部を検出することを特徴とする請求項11に記載の画像処理装置。
- 管腔内画像から異常部を検出する画像処理装置の作動方法であって、
演算部が、前記管腔内画像の画素値をもとに、各画素の勾配情報を算出する勾配情報算出工程と、
前記演算部が、前記勾配情報をもとに、勾配の強度が所定の値以上である画素を領域の内部に含まず、かつ、領域の境界が該領域の内側に所定の曲率以上で屈曲しないことを条件として該条件を満たす閉領域を作成する閉領域作成工程と、
前記演算部が、前記閉領域の内部から異常部を検出する異常部検出工程と、
を含むことを特徴とする画像処理装置の作動方法。 - コンピュータに、管腔内画像から異常部を検出させるための画像処理プログラムであって、
前記管腔内画像の画素値をもとに、各画素の勾配情報を算出する勾配情報算出手順と、
前記勾配情報をもとに、勾配の強度が所定の値以上である画素を領域の内部に含まず、かつ、領域の境界が該領域の内側に所定の曲率以上で屈曲しないことを条件として該条件を満たす閉領域を作成する閉領域作成手順と、
前記閉領域の内部から異常部を検出する異常部検出手順と、
を前記コンピュータに実行させることを特徴とする画像処理プログラム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010105755A JP5570866B2 (ja) | 2010-04-30 | 2010-04-30 | 画像処理装置、画像処理装置の作動方法、および画像処理プログラム |
| EP11003457.6A EP2383698B1 (en) | 2010-04-30 | 2011-04-27 | Image processing apparatus, method and program for detecting an abnormal part from an intraluminal image |
| US13/095,157 US8811698B2 (en) | 2010-04-30 | 2011-04-27 | Image processing apparatus, image processing method, and computer-readable recording medium |
| CN201110112034.6A CN102254320B (zh) | 2010-04-30 | 2011-04-29 | 图像处理装置及图像处理方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010105755A JP5570866B2 (ja) | 2010-04-30 | 2010-04-30 | 画像処理装置、画像処理装置の作動方法、および画像処理プログラム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2011232715A JP2011232715A (ja) | 2011-11-17 |
| JP2011232715A5 JP2011232715A5 (ja) | 2013-06-13 |
| JP5570866B2 true JP5570866B2 (ja) | 2014-08-13 |
Family
ID=44359464
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010105755A Active JP5570866B2 (ja) | 2010-04-30 | 2010-04-30 | 画像処理装置、画像処理装置の作動方法、および画像処理プログラム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8811698B2 (ja) |
| EP (1) | EP2383698B1 (ja) |
| JP (1) | JP5570866B2 (ja) |
| CN (1) | CN102254320B (ja) |
Families Citing this family (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2447672B (en) | 2007-03-21 | 2011-12-14 | Ford Global Tech Llc | Vehicle manoeuvring aids |
| JP5620194B2 (ja) * | 2010-08-24 | 2014-11-05 | オリンパス株式会社 | 画像処理装置、画像処理方法、および画像処理プログラム |
| JP5658945B2 (ja) * | 2010-08-24 | 2015-01-28 | オリンパス株式会社 | 画像処理装置、画像処理装置の作動方法、および画像処理プログラム |
| JP5754055B2 (ja) * | 2010-11-26 | 2015-07-22 | 日本電気株式会社 | 物体または形状の情報表現方法 |
| US8913807B1 (en) | 2010-12-30 | 2014-12-16 | Given Imaging Ltd. | System and method for detecting anomalies in a tissue imaged in-vivo |
| US9555832B2 (en) | 2011-04-19 | 2017-01-31 | Ford Global Technologies, Llc | Display system utilizing vehicle and trailer dynamics |
| US9346396B2 (en) | 2011-04-19 | 2016-05-24 | Ford Global Technologies, Llc | Supplemental vehicle lighting system for vision based target detection |
| US9335162B2 (en) | 2011-04-19 | 2016-05-10 | Ford Global Technologies, Llc | Trailer length estimation in hitch angle applications |
| US9854209B2 (en) | 2011-04-19 | 2017-12-26 | Ford Global Technologies, Llc | Display system utilizing vehicle and trailer dynamics |
| US9683848B2 (en) | 2011-04-19 | 2017-06-20 | Ford Global Technologies, Llc | System for determining hitch angle |
| US9723274B2 (en) | 2011-04-19 | 2017-08-01 | Ford Global Technologies, Llc | System and method for adjusting an image capture setting |
| US9926008B2 (en) | 2011-04-19 | 2018-03-27 | Ford Global Technologies, Llc | Trailer backup assist system with waypoint selection |
| JP5980555B2 (ja) * | 2012-04-23 | 2016-08-31 | オリンパス株式会社 | 画像処理装置、画像処理装置の作動方法、及び画像処理プログラム |
| JP6265588B2 (ja) * | 2012-06-12 | 2018-01-24 | オリンパス株式会社 | 画像処理装置、画像処理装置の作動方法、及び画像処理プログラム |
| CN102843514B (zh) * | 2012-08-13 | 2016-09-21 | 东莞宇龙通信科技有限公司 | 一种照片拍摄处理方法和移动终端 |
| JP5593009B1 (ja) * | 2012-11-07 | 2014-09-17 | オリンパスメディカルシステムズ株式会社 | 医療用画像処理装置 |
| JP6422198B2 (ja) * | 2012-11-29 | 2018-11-14 | オリンパス株式会社 | 画像処理装置、画像処理方法、及び画像処理プログラム |
| US9042603B2 (en) * | 2013-02-25 | 2015-05-26 | Ford Global Technologies, Llc | Method and apparatus for estimating the distance from trailer axle to tongue |
| CN103761743B (zh) * | 2014-01-29 | 2016-06-29 | 东北林业大学 | 一种基于图像融合分割的实木地板表面缺陷检测方法 |
| KR102350235B1 (ko) * | 2014-11-25 | 2022-01-13 | 삼성전자주식회사 | 영상 처리 방법 및 장치 |
| JP6503733B2 (ja) * | 2014-12-25 | 2019-04-24 | カシオ計算機株式会社 | 診断支援装置並びに当該診断支援装置における画像処理方法及びそのプログラム |
| US9607242B2 (en) | 2015-01-16 | 2017-03-28 | Ford Global Technologies, Llc | Target monitoring system with lens cleaning device |
| CN107529962B (zh) * | 2015-04-23 | 2020-02-07 | 奥林巴斯株式会社 | 图像处理装置、图像处理方法和记录介质 |
| US9821845B2 (en) | 2015-06-11 | 2017-11-21 | Ford Global Technologies, Llc | Trailer length estimation method using trailer yaw rate signal |
| US10384607B2 (en) | 2015-10-19 | 2019-08-20 | Ford Global Technologies, Llc | Trailer backup assist system with hitch angle offset estimation |
| US9836060B2 (en) | 2015-10-28 | 2017-12-05 | Ford Global Technologies, Llc | Trailer backup assist system with target management |
| US9610975B1 (en) | 2015-12-17 | 2017-04-04 | Ford Global Technologies, Llc | Hitch angle detection for trailer backup assist system |
| US10005492B2 (en) | 2016-02-18 | 2018-06-26 | Ford Global Technologies, Llc | Trailer length and hitch angle bias estimation |
| US10046800B2 (en) | 2016-08-10 | 2018-08-14 | Ford Global Technologies, Llc | Trailer wheel targetless trailer angle detection |
| US10222804B2 (en) | 2016-10-21 | 2019-03-05 | Ford Global Technologies, Llc | Inertial reference for TBA speed limiting |
| CN109840912B (zh) * | 2019-01-02 | 2021-05-04 | 厦门美图之家科技有限公司 | 一种图像中异常像素的修正方法及计算设备 |
Family Cites Families (39)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5487116A (en) * | 1993-05-25 | 1996-01-23 | Matsushita Electric Industrial Co., Ltd. | Vehicle recognition apparatus |
| JP3597272B2 (ja) * | 1995-10-12 | 2004-12-02 | 富士写真フイルム株式会社 | 異常陰影候補の検出方法 |
| JPH1156828A (ja) * | 1997-08-27 | 1999-03-02 | Fuji Photo Film Co Ltd | 異常陰影候補検出方法および装置 |
| US6422994B1 (en) * | 1997-09-24 | 2002-07-23 | Olympus Optical Co., Ltd. | Fluorescent diagnostic system and method providing color discrimination enhancement |
| US6173083B1 (en) * | 1998-04-14 | 2001-01-09 | General Electric Company | Method and apparatus for analyzing image structures |
| US6728401B1 (en) * | 2000-08-17 | 2004-04-27 | Viewahead Technology | Red-eye removal using color image processing |
| JP2002099896A (ja) | 2000-09-22 | 2002-04-05 | Fuji Photo Film Co Ltd | 異常陰影候補検出方法および装置 |
| DE10157958B4 (de) * | 2000-11-29 | 2012-11-15 | Omron Corp. | Bildverarbeitungsverfahren und-vorrichtung |
| JP4450973B2 (ja) * | 2000-11-30 | 2010-04-14 | オリンパス株式会社 | 診断支援装置 |
| US7217266B2 (en) * | 2001-05-30 | 2007-05-15 | Anderson R Rox | Apparatus and method for laser treatment with spectroscopic feedback |
| JP4147033B2 (ja) * | 2002-01-18 | 2008-09-10 | オリンパス株式会社 | 内視鏡装置 |
| WO2003070102A2 (en) * | 2002-02-15 | 2003-08-28 | The Regents Of The University Of Michigan | Lung nodule detection and classification |
| FI20031835A (fi) * | 2003-12-15 | 2005-06-16 | Instrumentarium Corp | Menetelmä ja järjestelmä referenssimerkin paikantamiseksi digitaalisista projektiokuvista |
| CA2564240C (en) * | 2004-04-26 | 2014-10-07 | David F. Yankelevitz | Medical imaging system for accurate measurement evaluation of changes in a target lesion |
| AU2005260988A1 (en) * | 2004-07-09 | 2006-01-19 | Intellectual Property Bank Corp. | Method for displaying bioinformation using millimeter-wave band electromagnetic wave, device for acquiring and displaying bioinformation |
| JP4305431B2 (ja) * | 2005-09-06 | 2009-07-29 | ソニー株式会社 | 画像処理装置、マスク作成方法及びプログラム |
| US20070260214A1 (en) * | 2006-01-13 | 2007-11-08 | Olympus Medical Systems Corp. | Medical procedure through natural body opening |
| JP4891637B2 (ja) * | 2006-03-14 | 2012-03-07 | オリンパスメディカルシステムズ株式会社 | 画像解析装置 |
| JP4912787B2 (ja) * | 2006-08-08 | 2012-04-11 | オリンパスメディカルシステムズ株式会社 | 医療用画像処理装置及び医療用画像処理装置の作動方法 |
| US7949162B2 (en) * | 2006-08-14 | 2011-05-24 | Siemens Medical Solutions Usa, Inc. | System and method for solid component evaluation in mixed ground glass nodules |
| WO2008052312A1 (en) * | 2006-10-10 | 2008-05-08 | Cedara Software Corp. | System and method for segmenting a region in a medical image |
| JP5121204B2 (ja) * | 2006-10-11 | 2013-01-16 | オリンパス株式会社 | 画像処理装置、画像処理方法、および画像処理プログラム |
| US8223143B2 (en) * | 2006-10-27 | 2012-07-17 | Carl Zeiss Meditec, Inc. | User interface for efficiently displaying relevant OCT imaging data |
| WO2008091583A2 (en) * | 2007-01-23 | 2008-07-31 | Dtherapeutics, Llc | Image-based extraction for vascular trees |
| US7856130B2 (en) * | 2007-03-28 | 2010-12-21 | Eigen, Inc. | Object recognition system for medical imaging |
| CN101594817B (zh) * | 2007-04-24 | 2011-08-24 | 奥林巴斯医疗株式会社 | 医疗用图像处理装置以及医疗用图像处理方法 |
| US8520947B2 (en) * | 2007-05-22 | 2013-08-27 | The University Of Western Ontario | Method for automatic boundary segmentation of object in 2D and/or 3D image |
| JP5106928B2 (ja) * | 2007-06-14 | 2012-12-26 | オリンパス株式会社 | 画像処理装置および画像処理プログラム |
| CN109584996A (zh) * | 2007-12-13 | 2019-04-05 | 皇家飞利浦电子股份有限公司 | 一系列图像中的导航 |
| US8792698B2 (en) * | 2008-02-25 | 2014-07-29 | Hitachi Medical Corporation | Medical imaging processing device, medical image processing method, and program |
| JP5424584B2 (ja) * | 2008-06-17 | 2014-02-26 | オリンパス株式会社 | 画像処理装置、画像処理プログラムおよび画像処理装置の作動方法 |
| JP4626692B2 (ja) * | 2008-09-12 | 2011-02-09 | ソニー株式会社 | 物体検出装置、撮像装置、物体検出方法およびプログラム |
| JP4710979B2 (ja) * | 2009-01-09 | 2011-06-29 | ソニー株式会社 | 対象物検出装置、学習装置、対象物検出方法およびプログラム |
| JP5258694B2 (ja) * | 2009-07-27 | 2013-08-07 | 富士フイルム株式会社 | 医用画像処理装置および方法並びにプログラム |
| US8781160B2 (en) * | 2009-12-31 | 2014-07-15 | Indian Institute Of Technology Bombay | Image object tracking and segmentation using active contours |
| JP5452242B2 (ja) * | 2010-01-15 | 2014-03-26 | オリンパス株式会社 | 画像処理装置、内視鏡システム、プログラム及び画像処理装置の作動方法 |
| US8948474B2 (en) * | 2010-01-25 | 2015-02-03 | Amcad Biomed Corporation | Quantification method of the feature of a tumor and an imaging method of the same |
| JP5620194B2 (ja) * | 2010-08-24 | 2014-11-05 | オリンパス株式会社 | 画像処理装置、画像処理方法、および画像処理プログラム |
| JP5658945B2 (ja) * | 2010-08-24 | 2015-01-28 | オリンパス株式会社 | 画像処理装置、画像処理装置の作動方法、および画像処理プログラム |
-
2010
- 2010-04-30 JP JP2010105755A patent/JP5570866B2/ja active Active
-
2011
- 2011-04-27 EP EP11003457.6A patent/EP2383698B1/en not_active Not-in-force
- 2011-04-27 US US13/095,157 patent/US8811698B2/en active Active
- 2011-04-29 CN CN201110112034.6A patent/CN102254320B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| EP2383698A3 (en) | 2014-11-26 |
| US8811698B2 (en) | 2014-08-19 |
| CN102254320B (zh) | 2016-01-20 |
| EP2383698B1 (en) | 2017-09-06 |
| US20110274321A1 (en) | 2011-11-10 |
| CN102254320A (zh) | 2011-11-23 |
| JP2011232715A (ja) | 2011-11-17 |
| EP2383698A2 (en) | 2011-11-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5570866B2 (ja) | 画像処理装置、画像処理装置の作動方法、および画像処理プログラム | |
| JP5658945B2 (ja) | 画像処理装置、画像処理装置の作動方法、および画像処理プログラム | |
| JP5683888B2 (ja) | 画像処理装置、画像処理方法、および画像処理プログラム | |
| JP5620194B2 (ja) | 画像処理装置、画像処理方法、および画像処理プログラム | |
| JP4409166B2 (ja) | 画像処理装置 | |
| JP5424584B2 (ja) | 画像処理装置、画像処理プログラムおよび画像処理装置の作動方法 | |
| JP5622461B2 (ja) | 画像処理装置、画像処理方法、および画像処理プログラム | |
| JP5597049B2 (ja) | 画像処理装置、画像処理方法、および画像処理プログラム | |
| KR102251830B1 (ko) | 초음파 및 ct 영상의 정합에 관한 시스템 및 작동 방법 | |
| JP6570145B2 (ja) | 画像を処理する方法、プログラム、代替的な投影を構築する方法および装置 | |
| RU2711140C2 (ru) | Редактирование медицинских изображений | |
| CN105678746B (zh) | 一种医学图像中肝脏范围的定位方法及装置 | |
| CN113573654A (zh) | 用于检测并测定病灶尺寸的ai系统 | |
| CN104867147A (zh) | 基于冠状动脉造影图像分割的syntax自动评分方法 | |
| JP5931418B2 (ja) | 画像処理装置、画像処理装置の作動方法、及び画像処理プログラム | |
| JP2010512173A (ja) | 内視鏡からの映像を用いるコンピュータ支援解析 | |
| JP5566299B2 (ja) | 医用画像処理装置、及び医用画像処理方法 | |
| Bodzioch et al. | New approach to gallbladder ultrasonic images analysis and lesions recognition | |
| Rafiei et al. | Liver segmentation in abdominal CT images using probabilistic atlas and adaptive 3D region growing | |
| JP2008510565A (ja) | 標識された糞便または虚脱結腸領域の存在下で結腸壁を抽出するためのシステムおよび方法 | |
| JP5800549B2 (ja) | 画像処理装置、画像処理装置の作動方法、及び画像処理プログラム | |
| JP2022052210A (ja) | 情報処理装置、情報処理方法及びプログラム | |
| JP4252744B2 (ja) | 異常陰影検出装置 | |
| JP7444569B2 (ja) | 鏡視下手術支援装置、鏡視下手術支援方法、及びプログラム | |
| Fernandez-de-Manuel et al. | Liver segmentation and volume estimation from preoperative CT images in hepatic surgical planning: Application of a semiautomatic method based on 3D level sets |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130422 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130422 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130425 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140204 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140311 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140507 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140617 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140625 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5570866 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |