以下、本発明における実施形態について説明する。以下の説明において、異なる実施形態における同じ機能を有する要素については、同一の符号を付しまたはその符号に「B」、「C」などを付加した符号を用いて説明を省略しまたは簡略化することがある。
〔第1の実施形態〕
図1において、物体検知システム1は、システムが対象とする全領域(以下、「システム領域」ということがある)の中で、物体BTの存在する領域(物体存在領域)EEを検知するシステムである。物体BTとして、人、動物、物品、製品、商品、または機械装置など、種々のものに適用できる。検知対象となる物体BTは、後述する無線検知装置7と一体で移動する。
物体検知システム1は、無線送受信集合装置3、無線検知装置7、およびサーバ8を備える。無線送受信集合装置3は、支持部材11およびRFタグ12a,12bを備える。
支持部材11は、電磁波を透過させない遮蔽部材、ここでは電波不透過部材を用いて形成される。例えば、鉄、ステンレス綱、フェライト、ニッケル合金、アルミニウム合金、または銅合金などの導電性を有する金属を材料として、支持部材11が形成される。その場合に、延べ板などのような金属塊を用いてもよく、またはウール綿のような金属繊維を用いてもよい。金属繊維を用いた場合には、電波の反射が抑制され、また軽量化を図り易い。
また、フェライトなどの高透磁率の材料、特に軟磁性材料を用いて支持部材11を形成してもよい。そのような高透磁率の材料を用いてシート状体にしたものを、基材の表面に適用することによって支持部材11を形成してもよい。その場合に、高透磁率の材料からなる電波吸収層、導電材料からなる電波反射層、およびその他の層などを積層した積層シートとすることができる。
そのようなシート状体として、例えば、ニッタ社製の電波吸収シート「PFNシリーズ」「PBSシリーズ」「RFNシリーズ」などを用いることができる。
また、支持部材11は、金属以外の材料であっても、水分を大量に含ませたりまたは防磁的処理を施すことによって電波を吸収するようになった材料を用いることができる。
支持部材11は、図1に示す例では直方体の形状に形成されている。すなわち、支持部材11は、平面視において長方形状を呈しており、その周囲に4つの平面である面HM1〜4を持つ。
RFタグ12(12a,12b)は、RFIDに用いる集積回路チップであり、無線送受信手段の例である。RFタグ12は、無線検知装置7との間で電磁波の送受信が可能であり、かつ自らの識別情報DSを無線検知装置7に送信することが可能である。RFタグ12と無線検知装置7との間の送受信の方式として、例えば、Bluetooth(登録商標)、WiFiなどのIEEE802シリーズの規格を用いることが可能であるが、これ以外の種々の方式または手順を用いることが可能である。
図1において、2つのRFタグ12a,12bは、支持部材11の表面の異なる位置に配置されまたは埋め込まれることによって、それぞれ送受信の指向性が特定の領域のみとなるように限定されている。
つまり、1つのRFタグ12aは、面HM1のほぼ中央部に、他の1つのRFタグ12bは面HM1の裏側にある面HM3のほぼ中央部に、それぞれ配置される。面HM1への接面(接線)を境界として、つまりこの例では面HM1およびその延長面である境界面(境界線)KK1を境界として、その左側が、RFタグ12aの検知可能領域EK1である。面HM3およびその延長面である境界面KK3を境界として、その右側が、RFタグ12bの検知可能領域EK2である。
なお、支持部材11の大きさは、無線検知装置7から見てRFタグ12bの存在を隠せる程度に十分な大きさとする。
また、RFタグ12a,12bを支持部材11の表面に配置するとは、支持部材11の表面に接触する場合および接触しない場合を含み、また、支持部材11の表面に設けられた凹部の中、支持部材11の表面の近くの内部に設けられた空洞の中、支持部材11の表面から浮き上がった周辺部分などをも含む。例えば、支持部材11が背面側のRFタグ12a,12bの存在を隠せる程度に十分な大きさであれば、RFタグ12a,12bを支持部材11の周囲に配置してもよい。
このように、RFタグ12a,12bの指向性は、それぞれ、検知可能領域EK1またはEK2のみに向けられるように限定される。そのため、無線検知装置7は、2つのRFタグ12a,12bに対して同時にアクセスすることができない。
なお、以下において、RFタグ12a,12bについての識別情報DSが、「TG1」、「TG2」などであるとして説明する。
このように、無線送受信集合装置3によって、複数のRFタグ12の指向性に基づき、その周囲の領域が複数の領域に区画され、これによって複数の識別可能領域ESが画定される。
システム領域を包含する座標系(以下、「システム座標系」ということがある)における、無線送受信集合装置3が配置された位置および姿勢または方向を示すデータが、無線検知装置7およびサーバ8に登録されている。
また、システム座標系における、各RFタグ12の配置位置および姿勢または方向、各検知可能領域EK、および、後で述べる各識別可能領域ESなどについてのデータも、例えば後で述べるタグ登録データTTG1などとして、無線検知装置7およびサーバ8に登録されている。
なお、RFタグ12として、パッシブ型、アクティブ型、セミパッシブ型、セミアクティブ型など、種々の型式のものを用いることが可能である。
なお、例えばパッシブ型のRFタグ12では、電池などの電源を内蔵せず、無線検知装置7からの誘導起電力などによる場合を除いて自ら独立して信号電波を発しない。またアクティブ型のRFタグ12では、電源を内蔵し、いつでも自ら独立して信号電波を発することが可能である。セミアクティブ型のRFタグ12では、電源を内蔵し、アクティブ型のRFタグ12と同じ電波受発信メカニズムを有するが、無線検知装置7などによるトリガーエリアに存在しているときにのみ、自ら独立に信号電波を発する。セミパッシブ型では、電源を内蔵しているが、パッシブ型のRFタグ12と同じ電波受発信メカニズムを有し、無線検知装置7からの誘導起電力などによる場合を除いて自ら独立して信号電波を発しない。
無線検知装置7は、RFタグ12との間でデータの送受信が可能であり、無線送受信集合装置3およびRFタグ12に対して相対的に移動可能である。なお、無線検知装置7がRFタグ12との間で送受信が可能であることを、無線検知装置7がRFタグ12を検知する、と記載することがある。
図2において、無線検知装置7は、ユーザが手で握って容易に持つことができるよう、またユーザが容易に操作しまたは表示内容を確認できるよう、合成樹脂などからなるハウジング70を有する。ハウジング70に、送受信部71、制御処理部72、メモリ73、表示部74などが設けられる。
なお、本実施形態の無線検知装置7では、ユーザがそれを手で持って使用するものとして説明するが、他の形態、例えばユーザがそれを腕時計のようにはめて使用するものでもよい。
送受信部71は、制御処理部72の指令にしたがって、RFタグ12との間で電波による送受信を行う。送受信部71は、RFタグ12に対して空間的拡がりを持って、電波の送受信を行う。つまり、送受信部71は、無線検知装置7の前方の空間における所定の検知角αの範囲(検知用電波範囲)DKにおいて電波を発射し、その範囲DKにおいてRFタグ12との間の送受信が可能である。
送受信部71で使用する電波の周波数(波長)および電力は、無線送受信集合装置3の大きさや使用目的などに応じて、種々のものとすることができる。つまり、電波の周波数、強度、通信距離などを、使用するRFタグ12に対応した規格のものとし、電波遮蔽物である支持部材11に対して背後への回り込みが少ないものを選定する。
例えば、周波数として、433MHz帯、900MHz帯、2.45GHz帯などの極超短波(UHF)を用いることができる。また、それ以上周波数の高いマイクロ波を用いてもよい。また、13.56MHzなどの周波数の低い短波、超短波を用いることも可能である。また、後で第15の実施形態において説明するように、電磁波の一種である光線(可視光線、赤外線など)を用いることも可能である。
送受信部71が送受信可能なRFタグ12との距離は、電波の強度および送受信のためのアンテナの大きさを調整することによって種々設定することができる。例えば、0〜1m程度、0〜3m程度、0〜10m程度、0〜数十m程度などとすることができる。また、空中線電力の大きなRFタグ12または適当な無線機器を用いることにより、数百メートル程度まで、または数キロメートル程度まで、さらにそれ以上の距離とすることが可能である。
検知角αは、ハウジング70の適所に電波吸収板や電波反射板などからなるフードを用いることにより、使用するRFタグ12の検知目的に適した大きさの角度に調整される。また、検知角αは、適当な位置から無線送受信集合装置3の全体をカバーできるものであることが望ましい。検知角αは、例えば、立体角で40〜90度程度である。
送受信部71がRFタグ12から受信した識別情報DSなどは、制御処理部72に送られる。
制御処理部72は、送受信部71に送受信の指令を与えるなど、無線検知装置7の全体を制御する。制御処理部72は、また、送受信部71から受け取った識別情報DSなどに基づいて、種々のデータ処理を行うことが可能である。
例えば、送受信部71から受け取った識別情報DSなどに基づいて、複数のRFタグ12の指向性によって識別される複数の領域(識別可能領域)ESのうちのいずれの領域ESに物体BTが存在するかを検知する。その処理に際して、メモリ73に記憶された位置情報、特性情報、またはテーブルなどを参照する。
ここで、識別可能領域ESについて説明する。
上に述べたように、各RFタグ12の送受信の指向性に応じて、それぞれの検知可能領域EKが決定される。検知可能領域EKに基づいて、識別可能領域ESが決定される。
図1の例では、2つの検知可能領域EK1,2は、互いに重複しないので、それぞれがそのまま識別可能領域ES1,2となる。
つまり、無線検知装置7がRFタグ12aとの間で通信(送受信)できたときは、無線検知装置7が識別可能領域ES1に存在するということであり、このことが制御処理部72において検知される。
そして、無線検知装置7と物体BTとは一体で移動するので、その場合に、概ね、物体BTは識別可能領域ES1に存在することになり、このことが制御処理部72において検知される。
また、無線検知装置7がRFタグ12bとの間で通信できたときは、無線検知装置7が識別可能領域ES2に存在するということであり、このことが制御処理部72において検知される。これにより、物体BTが識別可能領域ES2に存在することが制御処理部72において検知される。
このように、制御処理部72は、検知処理手段として動作することが可能である。なお、制御処理部72において検知された識別可能領域ESは、その識別可能領域ESに物体BTが存在することから、それを「物体存在領域EE」と記載することがある。
つまり、物体検知システム1は、システム領域内に配置された無線送受信集合装置3によって画定された多数の識別可能領域ESの中から、無線検知装置7がRFタグ12と送受信を行うことによって、その時点で物体BTが存在する特定の識別可能領域ESつまり物体存在領域EEを検知するものといえる。
メモリ73は、半導体メモリ素子または磁気ディスクなどであり、種々の情報、データベース、およびテーブルなどを記憶する。本実施形態においては、図3に示すタグ登録データTTG1、図4に示す領域判別テーブルTB1、その他の情報を記憶する。
図3において、タグ登録データTTG1には、無線送受信集合装置3に取り付けられたRFタグ12について、種々の情報が記録されている。
つまり、タグ登録データTTG1には、各RFタグ12の識別情報DS、RFタグ12が取り付けられている無線送受信集合装置3についての情報である集合装置情報JS、RFタグ12の位置情報JT、RFタグ12についての境界面情報JK、その他の情報が記録される。
なお、集合装置情報JSには、無線送受信集合装置3の座標位置、姿勢などの情報が含まれる。また、集合装置情報JSに、無線送受信集合装置3に関連付けられた探索物品についての情報である探索物品情報を含めることができる。探索物品情報は、例えば、無線送受信集合装置3と位置的に関連した他の物体などについて、その位置または内容などを示すデータ、およびその物体の画像などである。
また、境界面情報JKには、RFタグ12の境界面KKの座標および方向、識別可能領域ESの座標およびそれが向く方角などが含まれる。
また、無線送受信集合装置3が複数あるときは、それら複数の無線送受信集合装置3の全部のRFタグ12について、その識別情報DS、位置情報JT、境界面情報JK、集合装置情報JSなどがタグ登録データTTG1として記録される。
図4において、領域判別テーブルTB1は、識別可能領域ESと検知されたRFタグ12との対応関係を示すテーブルである。領域判別テーブルTB1によると、RFタグ12aの識別情報DSである「TG1」が検知(認識)されたときには、それに対応する識別可能領域は「ES1」であり、RFタグ12bの識別情報DSである「TG2」が検知されたときにそれに対応する識別可能領域は「ES2」である。
また、メモリ73には、無線検知装置7に対してユーザの入力操作によって入力された情報、サーバ8から転送された情報、および、過去においてRFタグ12から収集した情報などを記憶することができる。
それらの情報には、例えば、文字情報および数値情報のみでなく、地図情報、機器情報、および設備情報などの画像情報、並びに確認時の音声情報などを含ませることができる。またこれらの情報は、必要に応じてサーバ8などに転送することができる。
無線検知装置7には、それらの情報の送受信を行うための、図示しないインタフェースが必要に応じて設けられる。また、入力操作のためのボタンまたはスイッチなどが必要に応じて設けられる。
表示部74には、LCDパネル(液晶表示パネル)またはELディスプレイパネル(エレクトロルミネッセンス表示パネル)などが用いられ、制御処理部72において検知された物体存在領域EEの他、種々の情報が表示される。
表示部74をタッチパネルとすることにより、表示部74を用いてユーザが入力操作を行うことが可能である。また、表示部74に代えて、または表示部74とともに、音声出力部、バイブレータ、または表示灯などを設け、音、振動、または光の点滅などによってユーザに情報を知らせるようにしてもよい。
サーバ8は、コンピュータシステムであり、無線検知装置7と無線または有線の適当なインタフェースを介して接続され、無線検知装置7との間でデータの送受信を行うことが可能である。サーバ8は、例えば、1つまたは複数の無線検知装置7からデータを収集し、収集したデータに基づいて処理を行う。サーバ8に、上に述べたような検知処理手段としての機能を持たせることも可能である。なお、物体検知システム1においてサーバ8を省略することも可能である。
また、サーバ8は、無線検知装置7に対して、必要なデータの書き込みを行う。また、無線検知装置7などにデータを書き込むことにより、無線検知装置7を介して間接的にRFタグ12にデータを予め書き込むこともできる。
例えば、各RFタグ12は、それぞれ独自の識別情報DSを持っているが、それぞれのRFタグ12に対し、サーバ8は、無線検知装置7などを介してその識別情報DSを各RFタグ12に予め書き込んでおくことが可能である。
なお、無線検知装置7は、複数のRFタグ12と実質的に同時に送受信を行い、各RFタグ12に記憶された識別情報DSなどを取得することが可能である。また、取得される全ての識別情報DSについて、それを認識して適切な処理を行うことが可能であり、それに対応した識別可能領域ES、つまり物体存在領域EEを検知することが可能である。
また、無線検知装置7は、それを持ったユーザが通常の歩行速度で移動した場合に、時々刻々に、しかも概ね瞬時に、物体検知システム1において配置された検知可能な全てのRFタグ12と送受信を行うことが可能である。
無線検知装置7は、図2に示すような独立した携帯型装置であってもよいが、その形態はこれに限定されない。例えば、衣服や手袋、帽子、ヘルメット、靴、時計、メガネ、補聴器、またはペンダントなど、人などに装着される物体に取り付けられまたは組み込まれたウエアラブルな装置であってもよい。また、カバン、バッグ、ペン、カメラ、懐中電灯、携帯電話、またはモバイルPCなど、人が持ち運びする道具や機器などの物体に取り付けられまたは組み込まれた装置であってもよい。また、車椅子、台車、リヤカー、自転車、または掃除機など、人による操作をともなう移動装置である物体に取り付けられまたは組み込まれた装置であってもよい。さらに、ロボット、コンベヤー、またはエレベータなどの自走型機械である物体に取り付けられまたは組み込まれた装置であってもよい。
また、その場合に、上に述べた送受信部71、制御処理部72、メモリ73、表示部74などを、互いに分離して異なる位置に別々に配置することも可能である。
また、物体検知システム1において複数の無線検知装置7を用いることが可能である。それぞれの無線検知装置7を持ったユーザが、上に述べたと同様に物体存在領域EEを検知することができる。各無線検知装置7には、それぞれを識別可能な識別子をメモリ73に記憶しておけばよい。これにより、サーバ8は、いずれの無線検知装置7が、つまりどのユーザが、検知された物体存在領域EEにいるのかを知ることができる。
また、無線検知装置7は、上に述べたように基本的には移動可能である。しかし、使用するRFタグ12または無線送受信集合装置3が移動したり回転する場合には、無線検知装置7は、監視装置として動作させるために、一定時間の間一定場所に固定するようにしてもよい。
上のように構成された物体検知システム1において、ユーザが無線検知装置7を持ってシステム領域内を移動し、適当な位置で無線検知装置7を作動させる。無線検知装置7は、前方に向けて電波を発射し、検知角αの範囲内にありかつ無線検知装置7に対する指向性が有効な範囲DKにあるRFタグ12との間で通信を行う。
無線検知装置7は、RFタグ12との通信によって得られた識別情報DSに基づいて、無線検知装置7つまり物体BTであるユーザが、いずれの識別可能領域ES1〜2に存在するのかを判断する。
図1の例では、物体BTが識別可能領域ES1に存在する、と判断し、それを物体存在領域EEとしてその領域を示すデータを表示部74に表示する。
表示部74には、例えば、システム領域を示す地図が表示され、その中で物体存在領域EEの範囲が強調表示される。また、物体存在領域EEを示す座標値が表示される。また、無線送受信集合装置3と位置的に関連した他の物体について、その位置または内容などを示すデータ、または物体の画像などが表示される。
ユーザは、表示部74の表示内容を見ることにより、自分の現在位置を知ることができる。また、自分の周囲または近くに存在する物体の位置やその物体についての情報などを知ることができる。
また、検知された識別可能領域ES1それ自体がユーザの到着すべき位置目標であった場合には、ユーザは、その識別可能領域ES1に到着したことを知ることができる。
このように、物体検知システム1によると、所定の位置に無線送受信集合装置3を配置するという、簡単な構成によって、物体BTの存在領域を検知することができる。
なお、上に説明した例では、無線検知装置7がRFタグ12から受信した識別情報DSに基づいて物体存在領域EEを判断した。しかし、RFタグ12から受信した識別情報DSに代えて、またはこれとともに、RFタグ12から受信されなかった識別情報DSに基づいて物体存在領域EEを判断してもよい。
その場合に、例えば、対象となる支持部材11に設けられている全てのRFタグ12a,12bについて、その識別情報DSを無線検知装置7などにタグ登録データTTG1として登録しておく。
そして、タグ登録データTTG1として登録されている2つの識別情報DSのうち、1つのみが受信され他の1つが受信されなかったときに、受信されなかった方の識別情報DSに対応する識別可能領域ESには存在しないと判断してもよい。また、その場合に、受信された識別情報DSに基づいて物体存在領域EEを判断するとともに、それが正しいことを確認するために、受信されなかった方の識別情報DSを利用してもよい。
また、同時には受信できない複数の識別情報DSが受信されたときは、例えばそれをエラーであるとして処理を行い、ユーザに姿勢を変更したり無線検知装置7を回転させたりして再読み取り操作を行うように指示を行ってもよい。
なお、図1の例では、2つの識別可能領域ESの間に空白領域が存在するが、通常、このような空白領域はない方が好ましい。そのためには、RFタグ12の個数を増やし、または支持部材11の形状を変更すればよい。そのような例について後で説明する。
なお、上の実施形態において、無線送受信集合装置3の構造として、支持部材11とそれに取り付けられるRFタグ12とが一体型に成型されていてもよい。無線送受信集合装置3においては、各RFタグ12における支持部材11に対する接面(接線)の方向が判断できればよい。
また、上の実施形態では、無線送受信手段としてRFタグ12それ自体を用いた。しかし、RFタグ12に代えて、RFタグ12のアンテナの部分のみを無線送受信手段として用いてもよい。その場合には、RFタグ12に代えてアンテナのみを元の位置に配置し、RFタグ12の動作回路本体部分を支持部材11の他の箇所に設けるようにすればよい。この場合に、動作回路本体部分は、各アンテナによって送受信される電磁波を生成しまたは処理する信号処理装置として機能することになる。これについては、その例を第14の実施形態において説明する。
また、各RFタグ12に対し、専用の延長アンテナをそれぞれ接続するようにし、その延長アンテナを無線送受信手段として用いてもよい。その場合に、その延長アンテナをRFタグ12に代えて配置すればよい。
上の実施形態では、支持部材11を直方体の形状としたが、これ以外の種々の形状とすることができる。例えば、立方体、正四角柱、正五角柱、正六角柱、正八角柱、または正12角柱などの多角柱、円柱、また、正四面体、正三角錐、正四角錐、正八角錐などの多角錐、その変形としての多角錐台、正八面体、正12面体、正20面体などの多面体、球、半球、楕円体、回転楕円体、高次曲線面などの球面体などであってもよい。
また、支持部材11の重量を軽くしたり、コストを低減するために、支持部材11の中をくりぬいて空洞にしたり、その空洞に水分を充填したりすることも可能である。また、容器のような椀形状とし、または覆いのようなドーム形状とすることも可能であり、構造の一部に欠損部があってもよい。また、無線送受信集合装置3を、特に壁面、床面、天井面、コーナー部などに設置する場合は、上に述べた種々の形状の一部を切除した形状としてもよい。
このような支持部材11の形状およびRFタグ12の配置の変形例について、その一部を次の図5(a)〜(d)において示し、また他の一部を第2の実施形態以降に示す。
すなわち、図5(a)〜(d)に示される無線送受信集合装置3Aa〜3Adにおいて、支持部材11Aa〜11Adはいずれも柱状であり、その水平断面が図に示されている。
図5(a)に示す無線送受信集合装置3Aaでは、支持部材11Aaは、その水平断面形状が正三角形状であり、かつ正三角形の各頂点から外方へ突出するヒレ状の壁部111a〜cが設けられた形状である。支持部材11Aaの各面HM1〜3に、RFタグ12Aa〜cが取り付けられる。つまり、各RFタグ12Aa〜cは、各面HM1〜3とその両側の壁部111a〜cとによって形成される凹部に埋め込まれた状態である。
無線送受信集合装置3Aaでは、壁部111a〜cによって、RFタグ12Aa〜cへの電波の回り込みが低減される。これにより、各RFタグ12Aa〜cの指向性の範囲が明確に設定可能である。つまり、各RFタグ12Aa〜cの指向性の範囲は、壁部111a〜cの各先端部を結ぶ線(面)を境界として、その境界の背面側には存在しない。したがって、識別可能領域ESの画定が容易である。
図5(b)に示す無線送受信集合装置3Abでは、支持部材11Abは、その水平断面形状がコの字形状である。支持部材11Abの各面HM1〜6に、RFタグ12Ba〜fが取り付けられる。つまり、RFタグ12Ba〜fが、支持部材11Abの外側の面HM1〜3のみでなく、内側の面HM4〜6にも取り付けられる。
無線送受信集合装置3Abによると、図の上から下に向かう方向(矢印M1方向)における検知精度の向上が図られる。つまり、図の上方における識別可能領域ESを細かく画定することが可能となり、図の上方における物体存在領域EEを精度よく特定することが可能となる。
図5(c)に示す無線送受信集合装置3Acでは、支持部材11Acは、円柱状の軸部112aと、軸部112aの外周に設けられた外形が正六角形の外周部112bとからなる。したがって、支持部材11Acは、その形状が全体として正六角柱であり、水平断面が正六角形である。軸部112aには、例えば導電性を有する金属が用いられる。また、軸部112aに、例えば合成樹脂のように電磁波を透過させる非遮蔽部材(電波透過部材)を用いてもよい。軸部112aを中空としてもよい。
無線送受信集合装置3Acでは、その周囲の領域に対して、特定の方向に偏ることなく多数の識別可能領域ESに画定することができる。
図5(d)に示す無線送受信集合装置3Adでは、支持部材11Adは、その水平断面形状が星形である。RFタグ12Dは、星形を形成する各面HMに取り付けられる。したがって、RFタグ12Dは、星形の各頂点の間に形成される凹部に、それぞれ2個ずつが埋め込まれた状態となる。
無線送受信集合装置3Adでは、その周囲の領域に対して、特定の方向に偏ることなくさらに多数の識別可能領域ESに画定することができる。
図5に示す例では、支持部材11Aa〜11Adの周囲の全ての面HMにRFタグ12を取り付けた。しかし、使用目的に対応した識別可能領域ESを画定することが可能であれば、一部のRFタグ12を省略して特定の一部の面HMにのみRFタグ12を取り付けてもよい。
なお、無線検知装置7の検知角αは、適当な位置からこれら無線送受信集合装置3Aa〜dの全体をカバーできるものであることが望ましい。なお、無線検知装置7と物体BTとが一体で移動する例を説明したが、無線検知装置7を物体BTそれ自体としてもよく、または物体BTに無線検知装置7を組み込んでもよい。
上の実施形態において、無線送受信集合装置3,3Aa〜dを床面上や構造物のフレームなどに取り付けるために、適当な支持台を用いてもよい。そのような支持台の材料として、支持部材11と同様な遮蔽部材(電波不透過部材)を用いてもよい。
上の実施形態において、無線送受信集合装置3,3Aa〜dを周囲から保護しまたは埃などが被らないようにするために、その全体を覆うカバーを用いてもよい。その場合には、カバーの材料に非遮蔽部材(電波透過部材)を用いて内部のRFタグ12の電波感受性に影響を及ぼさないようにすればよい。
また、これら無線送受信集合装置3,3Aa〜dに代えて、複数のアンテナを備え、各アンテナから送信される情報について個別の識別情報によって管理可能な集積型RFタグを用いることも可能である。これについては後で説明する。
なお、支持部材11、Aa〜11Adは、RFタグ12に対して所定の指向性を与えられるようにさせすれば、RFタグ12を取り付ける部分など、必要な部分にのみ遮蔽部材を用いるようにしてもよい。
また、そのような遮蔽部材を組み込んで指向性を持ったRFタグ(指向性RFタグ)を構成した場合には、その指向性RFタグが、無線送受信手段と遮蔽部材または支持部材との両方の機能を有するものということになる。その場合に、上に述べた支持部材11、Aa〜11Adは、そのような指向性RFタグを取り付ける支持部材としての機能を有するものとなる。
〔第2の実施形態〕
次に、第2の実施形態の物体検知システム1Bについて説明する。
図6において、物体検知システム1Bは、無線送受信集合装置3B、無線検知装置7、およびサーバ8を備える。無線送受信集合装置3Bは、支持部材11BおよびRFタグ12a〜dを備える。
支持部材11Bは、遮蔽部材を用いて、平面視が正方形の直方体状に形成されている。周囲の4つの面HM1〜4のそれぞれのほぼ中央部に、RFタグ12a〜dが1つずつ配置される。
なお、支持部材11Bの大きさは、無線検知装置7から見てRFタグ12c,dの存在を隠せる程度に十分な大きさとする。
支持部材11Bは、各面HM1〜4が、それぞれ、西、南、東、北を向くように配置される。すなわち、図6は上方を北とした場合である。
各面HM1〜4への接面が境界面KK1〜4である。各境界面KK1〜4の前方が、各RFタグ12a〜dについて指向性を持った検知可能領域EK1〜4である。
つまり、例えば、無線検知装置7が図6に示す位置にあるときに、その位置は検知可能領域EK1でもありかつ検知可能領域EK2でもある。したがって、無線検知装置7は、2つのRFタグ12a、12bと同時に送受信を行うことが可能である。
この場合に、2つのRFタグ12a、12bと実際に送受信を行ったとすると、無線検知装置7は、2つの検知可能領域EK1、2の重なる領域、つまり識別可能領域ES1に存在したこととなり、これが無線検知装置7の物体存在領域EEとなる。したがって、この場合の物体存在領域EEは、第1の実施形態の場合と比べてより狭い領域に特定されることとなる。
このように、物体検知システム1Bでは、無線送受信集合装置3Bに設けられた4つのRFタグ12a〜dの指向性によって、図7に示すように、その周囲の領域(システム領域)が8つの識別可能領域ES1〜8に画定される。
8つの識別可能領域ES1〜8とRFタグ12a〜dの識別情報DSであるTG1〜4の検知の有無との対応関係が、図8の領域判別テーブルTB2に示されている。領域判別テーブルTB2はメモリ73に記憶されている。
すなわち、図8の領域判別テーブルTB2によると、例えば、識別情報DSとして「TG1」「TG2」が検知されたときは、それに対応する識別可能領域は「ES1」であり、識別情報DSとして「TG2」のみが検知されたときは、それに対応する識別可能領域は「ES2」である。
また、図には示されていないが、各識別可能領域ES1〜8は、無線送受信集合装置3Bから見ると、それぞれ、南西、南、南東、東、北東、北、北西、西の方角に相当する。また、無線検知装置7が各識別可能領域ES1〜8の中に移動した場合に、そのときの無線検知装置7から見た無線送受信集合装置3Bの方角は、北東、北、北西、西、南西、南、南東、東となる。
したがって、図6に示す例では、ユーザは、無線送受信集合装置3Bが北東の方角に存在することが分かる。
したがって、物体検知システム1Bによると、ユーザと一体に移動する無線検知装置7は、RFタグ12との通信によって得られた識別情報DSに基づいて、無線検知装置7つまり物体BTであるユーザが、いずれの識別可能領域ES1〜8に存在するのかを知ることができる。
また、ユーザは、無線送受信集合装置3BとRFタグ12a〜dの取り付け方位が特定できる場合には、無線送受信集合装置3Bがどの方角にあるのか、または無線送受信集合装置3Bから見て自分はどの方角にいるのか、などを知ることができる。
このように、第2の実施形態の物体検知システム1Bによると、ユーザは、より特定された領域を自分の現在位置として知ることができる。また、自分の周囲または近くに存在する物体の位置やその物体についての情報などをより詳細に知ることができる。
つまり、物体検知システム1Bによると、簡単な構成によって物体BTの存在領域を検知することができる。
また、RFタグ12との通信によって得られなかった識別情報DSをも用いて、いずれの識別可能領域ES1〜8に存在するのかまたは存在しないのかを判断することも可能である。
〔第3の実施形態〕
次に、第3の実施形態の物体検知システム1Cについて説明する。なお、物体検知システム1Cの図においては、物体BTおよびサーバなどの図示を省略する。以下同様である。
図9および図10において、物体検知システム1Cは、無線送受信集合装置3Cおよび無線検知装置7などを備える。無線送受信集合装置3Cは、支持部材11Cおよび多数のRFタグ12を備える。
支持部材11Cは、遮蔽部材を用いて平面視が正八角形の柱状に形成されている。周囲の8つの面HMのそれぞれのほぼ中央部に、RFタグ12a〜hが1つずつ配置される。
なお、支持部材11Cの大きさは、無線検知装置7から見てRFタグ12(図9ではRFタグ12e〜g、図10ではRFタグ12d〜g)の存在を隠せる程度に十分な大きさとする。
支持部材11Cは、各面HMが、それぞれ所定の方角を向くように配置され、その姿勢または方向に基づいた種々の情報が、無線検知装置7などに記憶される。
図9および図10では、上方を北とした場合を示している。
各面HMへの接面などに基づいて境界面KKが設定される。各境界面KKの前方が、各RFタグ12a〜hについて指向性を持った検知可能領域EKである。この例では、8つの検知可能領域EKが設定される。これら検知可能領域EKに基づいて、多数の識別可能領域ES1,2,3…が画定される。
なお、識別可能領域ESの画定に際しては、基本的には境界面KKまたは検知可能領域EKなどに基づいて幾何学的な区画を行うことでよいが、実際の電波の状態やRFタグ12の送受信の状態などに応じて修正すればよい。
図9に示す例では、無線検知装置7は、3つのRFタグ12a,b,cとの間でのみ送受信が可能である。無線検知装置7は、他のRFタグ12d〜hとは送受信できない。
したがって、RFタグ12dの境界面KK4の後方でかつRFタグ12hの境界面KK8の後方であって、しかもRFタグ12aの境界面KK1およびRFタグ12cの境界面KK3よりも前方にある識別可能領域ES1が、物体存在領域EEとして検知される。
この例では、物体存在領域EEは、無線送受信集合装置3Cから見て南西の方角であり、例えば南から西へ45度の方向にあることが検知される。
また、図10に示す例では、無線検知装置7は、4つのRFタグ12a,b,c,hとの間でのみ送受信が可能である。無線検知装置7は、他のRFタグ12d〜gとは送受信できない。
したがって、RFタグ12cの境界面KK3とRFタグ12hの境界面KK8との間にある識別可能領域ES5が、物体存在領域EEとして検知される。
この例では、物体存在領域EEは、無線送受信集合装置3Cから見て西南西の方角であり、例えば真西から南へ45度の範囲の方向にあることが検知される。
このようにして、ユーザは、無線検知装置7によって、現在いずれの識別可能領域ESに存在するのか、また無線送受信集合装置3Cがどの方角にあるのか、といったことを、高い精度で知ることができる。
なお、図9および図10において、各RFタグ12a〜hの位置にアンテナの部分のみを配置し、動作回路本体部分を支持部材11Cの内部に配置してもよい。その場合に、支持部材11Cの内部に配置する動作回路本体部分に、無線送受信集合装置3Cの全体または物体検知システム1の全体を管理するマネジャーの機能を持たせてもよい。
〔第4の実施形態〕
次に、第4の実施形態の物体検知システム1Dについて説明する。
図11および図12において、物体検知システム1Dは、無線送受信集合装置3Dおよび無線検知装置7などを備える。無線送受信集合装置3Dは、支持部材11Dおよび多数のRFタグ12を備える。
支持部材11Dは、遮蔽部材を用いて平面視が円形の柱状に形成されている。その周面に、多数のRFタグ12が配列されている。なお、支持部材11Dの大きさは、無線検知装置7から見て背面側のRFタグ12の存在を隠せる程度に十分な大きさとする。
これら多数のRFタグ12は、周方向の位置が互いに異なるので、支持部材11Dの表面への接面方向が互いに異なる。つまり、各RFタグ12ごとに、境界面KKの位置および方向が異なる。
図11および図12では、上方を北とした場合を描いている。
各境界面KKの前方が、各RFタグ12について指向性を持った検知可能領域EKである。この例では、24個の検知可能領域EKが設定される。これら検知可能領域EKに基づいて、多数の識別可能領域ESが画定される。
図11に示す例では、無線検知装置7は、RFタグ12uおよびRFタグ12vを含んでそれらの間にある11個のRFタグ12との間で送受信が可能である。無線検知装置7は、RFタグ12xからRFタグ12yまでの13個のRFタグ12とは送受信できない。
したがって、RFタグ12uの境界面KK1とRFタグ12vの境界面KK2との間にある識別可能領域ES1が、物体存在領域EEとして検知される。
図11に示す例では、物体存在領域EEは、無線送受信集合装置3Dから見て南西の方角であり、例えば南から西へ45度の方向にあることが高い精度で検知される。
図12に示す例では、無線検知装置7が無線送受信集合装置3Dに近づいたため、送受信可能なRFタグ12は10個に減少している。
すなわち、無線検知装置7は、RFタグ12uおよびRFタグ12vを含んでそれらの間にある10個のRFタグ12との間で送受信が可能である。無線検知装置7は、RFタグ12xからRFタグ12yまでの14個のRFタグ12とは送受信できない。
したがって、RFタグ12xの境界面KK3の後方でかつRFタグ12yの境界面KK4の後方であって、しかも、RFタグ12uの境界面KK1とRFタグ12vの境界面KK2との間にある識別可能領域ES1が、物体存在領域EEとして検知される。
図12に示す例では、物体存在領域EEは、無線送受信集合装置3Dに対する無線検知装置7の方向は図11の場合と同じであるが、無線検知装置7と無線送受信集合装置3Dとの間の距離が小さくなったことが検知される。
この例のように、支持部材11Dが円柱状である場合は、多角柱の場合のように面の数に規制されることなく、支持部材11Dの周面およびRFタグ12の大きさなどに応じて、多数のRFタグ12を配置することができる。RFタグ12をn個配置した場合に、(360/n)度の角度ごとに検知可能領域EKが設定され、これら検知可能領域EKの組み合わせによって多数の細かい識別可能領域ESを設定することができる。
そして、無線送受信集合装置3DにおけるいずれかのRFタグ12を、基準方向(例えば北の方向)に向けることにより、物体BTの物体存在領域EEを、その基準方向からの角度および方角で示すことができる。
さらに、検知された識別可能領域ESに応じて、無線検知装置7と無線送受信集合装置3Dとの間のおまかな距離も検知される。これにより、無線検知装置7が無線送受信集合装置3Dに近づいたのか、または遠ざかったのか、ということも検知可能である。
また、検知されたRFタグ12についての接面方向などに基づいて、その距離の範囲を演算などによって求めることも可能である。
また、無線検知装置7の検知方向、つまり電波の発射方向を基準方向(例えば北の方向)に向けた状態で、無線送受信集合装置3Dを支持部材11Dの中心軸を回転軸として回転させると、その回転速度に応じて、検知されるRFタグ12が順に切り替わる。
したがって、その場合に、無線検知装置7において、順に検知される識別情報DSについてデータ処理を行うことにより、無線送受信集合装置3Dの回転方向および回転速度を検知することができる。
また、無線送受信集合装置3Dを支持する支持台が一体で回転している場合には、その支持台の回転の状態も同時に検知されることとなる。
〔第5の実施形態〕
次に、第5の実施形態の物体検知システム1Eについて説明する。
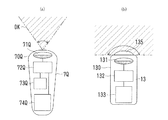
図13において、物体検知システム1Eは、無線送受信集合装置3Eおよび無線検知装置7などを備える。無線送受信集合装置3Eは、支持部材11Eおよび多数のRFタグ12a〜hを備える。
支持部材11Eは、遮蔽部材を用いて平面視が8つの頂部を持つ星形に形成されている。つまり、支持部材11Eは、その表面が面HMを凹凸に組み合わせた形状である。RFタグ12は、星形を形成する凸部と凸部との間の各凹部に1つずつ取り付けられる。
図13に示す支持部材11Eでは、星形を形成する各面HMによって境界面KKが設定され、検知可能領域EKが設定される。検知可能領域EKに基づいて、多数の識別可能領域ESが画定される。
なお、支持部材11Eの星形の長径の大きさは、無線検知装置7から見て背面側のRFタグ12の存在を隠せる程度に十分な大きさとする。
図13に示す例では、無線検知装置7は、RFタグ12aのみと送受信が可能である。したがって、RFタグ12aの両側の面HMによる境界面KK1,2の間にあって、かつ、境界面KK3の後方にありかつ境界面KK4の後方にある識別可能領域ES1が、物体存在領域EEとして検知される。
図13に示す物体検知システム1Eでは、各RFタグ12の指向性および独立性が高められている。これにより、RFタグ12の間の混信が低減され、識別可能領域ESや方向の検知が容易となる。
〔第6の実施形態〕
次に、第6の実施形態の物体検知システム1Fについて説明する。
図14において、物体検知システム1Fは、無線送受信集合装置3Fおよび無線検知装置7などを備える。無線送受信集合装置3Fは、支持部材11Fおよび多数のRFタグ12a〜hを備える。
支持部材11Fは、遮蔽部材を用いて平面視が8つの頂部を持つ星形に形成されている。つまり、支持部材11Fは、凸部および凹部に曲面が形成され、凸面と凹面とが組み合わされた形状である。RFタグ12は、各凹部に1つずつ取り付けられる。
なお、支持部材11Fの星形の長径の大きさは、無線検知装置7から見て背面側のRFタグ12の存在を隠せる程度に十分な大きさとする。
図14に示す支持部材11Fでは、星形を形成する各面HMによって境界面KKが設定され、検知可能領域EKが設定される。検知可能領域EKに基づいて、多数の識別可能領域ESが画定される。
図14に示す例では、無線検知装置7は、RFタグ12aのみとの間で送受信が可能である。したがって、RFタグ12aの両側の面HMによる境界面KK1,2の間にあって、かつ、境界面KK3の後方にありかつ境界面KK4の後方にある識別可能領域ES1が、物体存在領域EEとして検知される。
図14に示す物体検知システム1Eにおいても、各RFタグ12の指向性および独立性が高められている。これにより、RFタグ12の間の混信が低減され、識別可能領域ESや方向の検知が容易となる。
〔第7の実施形態〕
次に、第7の実施形態の物体検知システム1Gについて説明する。
上に述べた第1〜第6の実施形態では、各物体検知システム1、1B〜Fによって2次元的な面内における物体BTの位置を検知した。これに対し、第7の実施形態では、支持部材11Gを球状とした。これにより、支持部材11Gに対する無線検知装置7の位置に依存することなく、全方位からRFタグ12を検知でき、3次元的な空間内における物体BTの位置を検知することができる。
すなわち、図15において、物体検知システム1Gは、無線送受信集合装置3Gおよび無線検知装置7などを備える。無線送受信集合装置3Gは、支持部材11Gおよび多数のRFタグ12を備える。
支持部材11Gは、遮蔽部材を用いて球の形状に形成されている。球の表面に、多数のRFタグ12が配列されている。
なお、支持部材11Gの大きさは、無線検知装置7から見て背面側のRFタグ12の存在を隠せる程度に十分な大きさとする。
これら多数のRFタグ12は、表面上の位置が互いに異なるので、支持部材11Gの表面への接面方向が互いに異なる。つまり、各RFタグ12ごとに、境界面KKの位置および方向が異なる。
各境界面KKの前方が、各RFタグ12について指向性を持った検知可能領域EKである。これら検知可能領域EKに基づいて、多数の識別可能領域ESが画定される。
図16をも参照して、無線検知装置7は、RFタグ12uおよびRFタグ12vを含んだ仮想円周上にあるRFタグ12およびそれよりも無線検知装置7に近い側のRFタグ12との間で送受信が可能である。
したがって、RFタグ12uおよびRFタグ12vを含んだ仮想円周上にあるRFタグ12の各境界面KK1〜2よりも前方にあり、かつそれらのRFタグ12よりも1つずつ奥側にあるRFタグ12の各境界面KK3〜4の後方にある識別可能領域ES1が、物体存在領域EEとして検知される。
つまり、各境界面KK1〜2よりも前方により形成される円錐部分と、各境界面KK3〜4の後方によって形成される円錐部分との積集合が、識別可能領域ES1であり、これが物体存在領域EEとして検知される。
図15に示す物体検知システム1Gによると、無線送受信集合装置3Gによって3次元の空間内に多数の識別可能領域ESが画定される。無線検知装置7は、RFタグ12からの識別情報DSに基づいて、3次元的に識別される領域のうちのいずれの領域に物体BTが存在するかを検知することができる。
なお、支持部材11Gには、支持台21が取り付けられており、支持台21によって適当なフレームなどに取り付けられる。
〔球形の支持部材の構造の説明〕
次に、無線送受信集合装置3Gの構造について、その一例を説明する。
ここで説明する無線送受信集合装置3Gの構造によると、複数のRFタグ12は、支持部材11Gの表面に設けられた多数の凹部のそれぞれにおいて、電磁波を透過させる非遮蔽部材を介して支持されるように配置されまたは埋め込まれている。
すなわち、図17に示すように、無線送受信集合装置3Gに用いられる支持部材11Gは、球形であり、その表面に外形が円形で凹曲面状の多数のディンプル(窪み)DPが形成されている。各ディンプルDPの底部中央に、RFタグ12が1つずつ配置されている。
なお、ディンプルDPの外形は、円形以外に、正五角柱、正六角柱、正八角柱などの正多角形、または台形など、種々の形状とすることが可能である。
図18に示すように、支持部材11Gは、中心部24、電波吸収層25、およびソケット部材22などからなる。
中心部24は、遮蔽部材または非遮蔽部材を用いて、小球状に形成されていている。
電波吸収層25は、遮蔽部材つまり電波不透過部材を用いて、中心部24を覆うように球面状に形成されている。電波吸収層25は、RFタグ12から発射される電波のうち、電波吸収層25の表面に向かう成分を吸収しまたは反射し、RFタグ12が発射する電波に指向性を与える。
ソケット部材22は、遮蔽部材つまり電波不透過部材を用いて、電波吸収層25を取り囲むように球面状に形成されている。ソケット部材22には、円錐台状の多数の孔22aが設けられている。
各孔22aには、非遮蔽部材つまり電波透過部材を用いて形成された円錐台状の保持部材23が装着されている。
保持部材23の径が大きい方の端面は、凹曲面状に窪んでおり、これが上に述べたディンプルDPとなっている。ディンプルDPに配置されたRFタグ12は、ソケット部材22の表面から突出することなく、支持部材11Gに埋め込まれた状態となっている。
ソケット部材22によって、周囲の環境からRFタグ12にノイズ電波が入ることが防止され、またRFタグ12に必要な指向性が与えられる。
保持部材23によって、RFタグ12とソケット部材22および電波吸収層25とが密着することなく、それらの間に適当な距離が保たれる。これにより、RFタグ12の感度が低下しないように維持される。
このように、支持部材11Gは、概ね、ゴルフボールを大きくしたような形状である。電波吸収層25およびソケット部材22の内径、外径、厚さなどは、RFタグ12に対して必要な指向性を与えることができる程度とされている。
なお、ソケット部材22に設けられる孔22aの個数、つまり支持部材11Gに配置されるRFタグ12の個数は、多いほど精度の高い検知が可能である。したがって、孔22aの内径つまり保持部材23の外径は、必要な精度を得るための個数が確保される程度の小さな値に設定される。
なお、保持部材23や中心部24などに用いる非遮蔽部材として、例えば、プラスチック、発泡スチロール、木質、紙質などの非導電性物質を用いることが可能である。また、無線送受信集合装置3を設置する場合に応じて、対候性、耐熱性、対薬品性、または耐水性などを考慮した耐久性のある素材を用いることが好ましい。
また、保持部材23の中に気泡などを入れたり、またはRFタグ12を単に支持するだけの中空構造としてもよい。これにより、支持部材11Gの軽量化を図ることができ、またRFタグ12の感度が低下しないように維持される効果も期待できる。
〔第8の実施形態〕
次に、第8の実施形態の物体検知システム1Hについて説明する。
上に述べた第1〜第7の各実施形態では、無線送受信集合装置3、3B〜Gが1個のみである場合について説明した。しかし、1つの物体検知システムにおいて、無線送受信集合装置3、3B〜Gを複数個配置することができる。
その例として、第8の実施形態では、図11および図12に示す無線送受信集合装置3Dを複数個用いた物体検知システム1Hを説明する。
図19において、物体検知システム1Hでは、4つの無線送受信集合装置3Da〜dが、四辺形の4つの頂点の位置に配置されている。
これらの無線送受信集合装置3Da〜dは、いずれも図11および図12において説明した無線送受信集合装置3Dと同じ構成のものである。
物体検知システム1Hにおいて、各無線送受信集合装置3Da〜dのシステム座標系における位置、姿勢、方角などが認識されており、それらの情報が無線検知装置7およびサーバ8などに登録されている。
したがって、システム領域において、これらの無線送受信集合装置3Da〜dによって多数の識別可能領域ESが画定されている。1つの無線送受信集合装置3Dを用いた場合と比べて、より多くの細かい識別可能領域ESが画定されるので、物体存在領域EEの検知精度を高めることができる。
物体検知システム1Hにおいては、無線検知装置7をいずれの方向に向けた場合でも、無線送受信集合装置3Da〜dのいずれかがその電波を受信し、物体存在領域EEを検知することができる。
つまり、無線検知装置7を2次元的な面内において回転させ、各無線送受信集合装置3Da〜dに配置された複数のRFタグ12から受信した識別情報DSに基づいて、2次元的な面内における物体BTの位置を検知することができる。
例えば、図19に示す状態で、無線検知装置7から電波を発射させながら、電波の発射方向が変わるように無線検知装置7をその場で回転させる。その間において、4つの無線送受信集合装置3Da〜dとの送受信が順次行われ、それぞれの識別可能領域ESが検知される。それらの検知結果を総合することにより、無線検知装置7についての物体存在領域EEがより一層高い精度で検知される。
なお、無線検知装置7を回転させた場合において、4つ全ての無線送受信集合装置3Da〜dとの間で送受信が行われなくてもよい。送受信が行われた無線送受信集合装置3Dのみの検知結果を用いて最終的な識別可能領域ESを特定すればよい。
また、配置する無線送受信集合装置3Da〜dの位置は、四辺形の4つの頂点の位置でなく、任意の位置にまたは任意の分布で配置することが可能である。
なお、4つの無線送受信集合装置3Da〜dによる検知結果の総合処理は、無線検知装置7で行ってもよく、またサーバ8で行ってもよい。
図19に示す物体検知システム1Hでは、物体BTを例えばフォークリフトまたは自動走行ロボットなどとし、それらに無線検知装置7を装着した場合を想定することができる。この場合に、フォークリフトまたは自動走行ロボットは、無線検知装置7によって現在地および移動方向を確認することができ、作業に必要な動作を行うことが可能となる。
〔第9の実施形態〕
次に、第9の実施形態の物体検知システム1Jについて説明する。
第9の実施形態の物体検知システム1Jでは、さらに多数の無線送受信集合装置3Dが配置され、複数の無線検知装置7が同時に検知動作を行えるようになっている。
すなわち、図20に示す物体検知システム1Jにおいて、システム領域に12個の無線送受信集合装置3Dがマトリクス状に配置されている。システム領域内で、3つの無線検知装置7a〜cが使用され、それらが独立して検知動作を行っている。
各無線検知装置7a〜cは、それぞれの近辺に配置された1つまたは複数の無線送受信集合装置3Dとの間で送受信を行い、それぞれ正確な物体存在領域EEを検知する。1つの無線送受信集合装置3Dが複数の無線検知装置7と同時に送受信を行うことも可能である。各無線検知装置7a〜cによる検知結果は、サーバ8に送信され、サーバ8において総合的な判断および処理が行われる。
例えば、サーバ8において、各無線検知装置7a〜cを携帯した作業者(ユーザ)に対し、さらに移動すべき方向または目標などを指示する。また、それら作業者に対し、それぞれの位置において行うべき作業を指示する。
このように、第9の実施形態の物体検知システム1Jによると、例えばサーバ8を操作する管理者は、複数の作業者の現在位置をリアルタイムで把握し、必要な指示を与えることができる。
なお、作業者に代えて、フォークリフトまたは自動走行ロボットなどであってもよい。無線送受信集合装置3Dおよび無線検知装置7の個数、配置形態などは、任意のものとすることができる。
このような物体検知システム1Jは、例えば、工場、倉庫、プラント、競技場、博覧会場、イベント会場、農園、公園、山岳地帯、都市空間などにおいて利用することができる。
〔第10の実施形態〕
次に、第10の実施形態の物体検知システム1Kについて説明する。
第9の実施形態の物体検知システム1Jでは、複数の無線送受信集合装置3Dが平面的に配置されていたが、第10の実施形態の物体検知システム1Kでは、多数の図15に示す無線送受信集合装置3Gが、システム領域の空間内に立体的に配置されている。
すなわち、図21に示す物体検知システム1Kにおいて、マトリクス状に配置された9個の無線送受信集合装置3Gがさらに3層に立体的に配置されている。例えば、下層の無線送受信集合装置3Gは1階の高さ位置に、中層の無線送受信集合装置3Gは2階の高さ位置に、上層の無線送受信集合装置3Gは3階の高さ位置に、それぞれ配置される。
システム領域内において、2つの無線検知装置7a〜bが使用され、それらが独立して検知動作を行っている。
各無線検知装置7a〜bは、それぞれの近辺に配置された1つまたは複数の無線送受信集合装置3Gとの間で送受信を行い、それぞれ正確な物体存在領域EEを検知する。図に示す例では、各無線検知装置7a〜bは、それぞれ8つの無線送受信集合装置3Gとの間で送受信を行い、それぞれの物体存在領域EEを検知している。
各無線検知装置7a〜bによる検知結果は、サーバ8に送信され、サーバ8において総合的な判断および処理が行われる。
つまり、例えば無線検知装置7aを3次元的な空間内において回転させ、各無線送受信集合装置3Gに配置された複数のRFタグ12の識別情報DSに基づいて、3次元的な面内における物体BTの位置を検知することができる。
例えば、サーバ8において、各無線検知装置7a〜bを携帯した作業者(ユーザ)に対し、さらに移動すべき方向または目標などを指示する。例えば、立体倉庫などにおいて在庫品を取りにいった作業者に対して、「そこからさらに1m上へ上がれ」などと指示をする。
また、作業者に対しそれぞれの位置において行うべき作業を指示する。例えば、化学プラントのメンテナンスを行う作業者に対して、「50cm前方にあるバルブを締めてその右横30cmにあるバルブを開けよ」などと指示する。
このように、第10の実施形態の物体検知システム1Kによると、例えばサーバ8を操作する管理者は、複数の作業者の現在位置をリアルタイムで把握し、必要な指示を与えることができる。
なお、各無線検知装置7a〜bは、1つの無線送受信集合装置3Gとの間で送受信を行うことによってもその物体存在領域EEを検知することが可能である。しかし、複数の無線送受信集合装置3G、例えば3つ以上の無線送受信集合装置3Gとの間で送受信を行うことにより、より一層高い精度で物体存在領域EEを検知することができる。
〔第11の実施形態〕
次に、第11の実施形態の物体検知システム1Lについて説明する。
第11の実施形態では、支持部材11Lが回転楕円体である。ここでは支持部材11Lが特に長球である場合について説明する。偏球の回転楕円体については次の第12の実施形態で説明する。
すなわち、図22に示すように、物体検知システム1Lは、無線送受信集合装置3Lおよび無線検知装置7などを備える。無線送受信集合装置3Lは、支持部材11Lおよび多数のRFタグ12を備える。
支持部材11Lは、遮蔽部材を用いて長球の形状に形成されている。長球は、2つの同一長さの短半径aと1つの長半径bを持つ。図22に示す支持部材11Lは、3次元座標内において長半径がx軸上に一致するように配置されている。なお、ここでは水平方向をy軸、鉛直方向をz軸とする。
支持部材11Lの表面に、多数のRFタグ12が配列されている。これら多数のRFタグ12について、それぞれ境界面KKが規定され、検知可能領域EKが設定される。それらの検知可能領域EKに基づいて、多数の識別可能領域ESが画定される。
図23をも参照して、無線検知装置7は、RFタグ12uおよびRFタグ12vを含んだ仮想円周上にあるRFタグ12およびそれよりも無線検知装置7に近い側のRFタグ12との間で送受信が可能である。
したがって、RFタグ12uおよびRFタグ12vを含んだ仮想円周上にあるRFタグ12の各境界面KK1〜2よりも前方にあり、かつそれらのRFタグ12よりも1つずつ奥側にあるRFタグ12の各境界面KK3〜4の後方にある識別可能領域ES1が、物体存在領域EEとして検知される。
また、検知されたRFタグ12についての接面方向などに基づいて、無線検知装置7と無線送受信集合装置3Lとの距離L1が求められる。距離L1を求める方法について、その例を図23によって説明する。
図23には、図22の支持部材11Lを、水平面つまりx軸およびy軸を含む平面(水平面)で切断した断面(水平断面)DMAが示されている。図23に示す水平断面DMAの形状は楕円であり、長軸がx軸、短軸がy軸とそれぞれ重なっている。
なお、無線検知装置7は、無線送受信集合装置3Lの左側にあるものとする。つまり、無線検知装置7は、xy座標面と同じ面内にあり、かつxy座標面における第2象限および第3象限の範囲内にあるものとする。
さて、図23に示される水平断面DMAの楕円の式を、次の(1)式で表すものとする。
ax2 +by2 =1 ……(1)
支持部材11Lの周面に取り付けるRFタグ12の位置(x,y)において、上の(1)式で示される楕円に対する接線の式を、傾きをm、x切片をnとして、次の(2)式で表す。
x=my+n ……(2)
これらの接線は、各RFタグ12の検知可能領域EKについての境界線(検知境界線)であり、上に述べた各RFタグ12についての境界面KKに対応する。
上の(2)式におけるx切片nは、x軸上に置かれた無線検知装置7の位置を示す。つまり、回転楕円体である支持部材11Lの中心点を原点とするxy座標上で、無線検知装置7は、x=nの位置に存在することになる。
x切片nができるだけ均等な間隔で求まるように、支持部材11Lの水平断面DMAである楕円の形状パラメータa,b、およびRFタグ12の取り付け位置(x,y)を決定する。これにより、RFタグ12のうちで、無線検知装置7によって検知されたRFタグ12と検知されなかったRFタグ12とが決まると、無線検知装置7と無線送受信集合装置3Lとの間の距離L1またはその範囲が、容易に精密に求められる。
図24に、a=1、b=100とした場合の、x切片n、傾きm、およびRFタグ12の取り付け位置(x,y)の関係の具体例が示されている。
図23において、無線検知装置7は、n=−1からn=−5の範囲の整数で表される位置にある場合が示されている。それぞれの位置nに対応するRFタグ12の取り付け位置のx座標は、x=1/nである。
図23において、水平断面DMA内に記載された縦線(縦線群)は、x=1/n(n=−2、−3、−4、−5)で示される直線であり、これら縦線が楕円と交わる点にRFタグ12が取り付けられる。また、これら縦線が楕円と交わる点における接線、つまり、x=my+n(n=−2、−3、−4、−5)で示される直線が、境界線(KK)として示されている。
なお、図23において、図を分かりやすくするために、y軸方向の縮尺がx軸方向に比べて5倍引き伸ばして描かれている。
例えば、無線検知装置7によって、x=−1/4で示される縦線上にあるRFタグ12が検知され、x=−1/5で示される縦線上にあるRFタグ12が検知されなかった場合には、無線検知装置7は、x=−4からx=−5までの間に存在することとなる。
このように、無線検知装置7により検知されたRFタグ12に応じて、無線検知装置7と無線検知装置7と無線送受信集合装置3Lとの間の距離L1の範囲が精密に求められる。
図22に示す物体検知システム1Lによると、形状が回転楕円体である支持部材11Lを用いることにより、無線検知装置7までの距離L1(またはその範囲)、つまり無線検知装置7の位置を、精密に検知することができる。
また、支持部材11Lの水平断面DMAの楕円の形状パラメータa、bおよびRFタグ12の取り付け位置(x,y)を適当なものに調整することによって、無線検知装置7と無線送受信集合装置3Lとの間の距離L1の必要計測精度に応じた適切な物体検知システム1Lを設計することができる。
なお、無線検知装置7の距離の計測に際し、支持部材11Lのx軸を無線検知装置7の方に向ける必要があるが、無線検知装置7の方向を検知するために、先に説明したような種々の無線送受信集合装置3を用いることができる。
例えば、図11に示した無線送受信集合装置3Dを用いて無線検知装置7の方向を検知する。無線送受信集合装置3Lを、その向きを変更できるように回転可能に取り付けておき、無線送受信集合装置3Dを用いて検知された方向に無線送受信集合装置3Lのx軸を向ける。無線送受信集合装置3Lによって、無線検知装置7までの距離L1、つまり無線検知装置7の位置を精密に計測することができる。
また、複数の無線送受信集合装置3Lを、同じ場所に、互いのx軸の方向が異なるように設けておく。そして、無線検知装置7が、それら複数の無線送受信集合装置3Lに対して同時に検知を行う。このようにすると、各無線送受信集合装置3Lに対して計測された無線検知装置7までの距離を組み合わせることにより、無線検知装置7の方向と位置を、精密に検知しまたは計測することができる。
なお、ここでは、支持部材11Lが回転楕円体である場合について説明したが、支持部材11Lが楕円柱である場合においても、2次元的な面内における物体BTの方向および距離を精密に検知することができる。
すなわち、支持部材11Lが、その水平断面DMAが図23に示すような楕円である楕円柱であった場合に、2次元的な面内において物体BTの方向および距離を精密に検知し、その位置を精密に特定することが可能である。
ところで、図23では、無線検知装置7が支持部材11Lのx軸線上にあるものとして説明したが、x軸線上からずれている場合であっても、無線検知装置7と無線送受信集合装置3Lとの間の距離L1を精密に計測することができる。
すなわち、上に述べたように、無線検知装置7が支持部材11Lのx軸線上にある場合には、検知されるRFタグ12の集合(検知RFタグ群)と検知されないRFタグ12の集合(非検知RFタグ群)との境界部分はほぼ円形になる。
しかし、無線検知装置7が支持部材11Lのx軸線上からずれた場合には、その境界部分は円形とはならず、図25に示すように楕円形に近い形状となる。
すなわち、図25において、境界部分において無線検知装置7により検知されたRFタグ12の集合である検知RFタグ群GKが示されている。支持部材11Lは、境界部分において断面され、境界部分断面DMBとして示されている。
境界部分断面DMBの形状は、ほぼ楕円であり、長軸JKNと短軸JKTを有する。回転楕円体である支持部材11Lの中心点と無線検知装置7とを結ぶ直線とx軸とを含む平面の方向が、長軸JKNの方向であり、その平面に垂直な平面の方向が短軸JKTの方向である。
図25では、横方向が長軸JKNであり縦方向が短軸JKTである例が示されているが、無線検知装置7の位置によっては、縦方向が長軸JKNとなり横方向が短軸JKTとなることがあり、また、長軸JKNと短軸JKTとが互いに斜めに傾斜角を持って交わることもある。
また、上に述べたように無線検知装置7がx軸上にある場合は、長軸JKNと短軸JKTとは同じ長さとなるが、無線検知装置7がx軸上から離れるにしたがって、長軸JKNと短軸JKTとの長さの差が増大し、かつ短軸JKTが中心から偏心するという傾向がある。
図25において、長軸JKNおよび短軸JKTの各端部に位置する4つのRFタグ12a〜dを含む平面(境界部分断面DMB)に対して垂直な法線HS上に、無線検知装置7が存在する。したがって、法線HSは、無線検知装置7についての存在可能線ということができる。
また、距離L1については、短軸JKTの各端部に位置する2つのRFタグ12a〜bを用いて、図23の場合と同様の手続きによって求めることができる。すなわち、その2つのRFタグ12a〜bについての境界線(KK)を導出し、導出した境界線(KK)と法線HSとの交点に無線検知装置7が存在するとして、その間の距離L1を求めることができる。
〔第12の実施形態〕
次に、第12の実施形態の物体検知システム1Mについて説明する。
第12の実施形態では、支持部材11Mが偏球の回転楕円体である。
すなわち、図26に示すように、物体検知システム1Kは、無線送受信集合装置3Kおよび無線検知装置7などを備える。無線送受信集合装置3Kは、支持部材11Kおよび多数のRFタグ12を備える。
支持部材1KLは、遮蔽部材を用いて偏球の形状に形成されている。偏球は、1つの短半径aと2つの同一長さの長半径bとを持つ。
支持部材11Kの表面に、多数のRFタグ12が配列されている。これら多数のRFタグ12について、それぞれ境界面KKが規定され、検知可能領域EKが設定される。それらの検知可能領域EKに基づいて、多数の識別可能領域ESが画定される。
図27に、図25と同様に境界部分において無線検知装置7により検知されたRFタグ12の集合である検知RFタグ群GKが示されている。支持部材11Kは、境界部分において断面され、境界部分断面DMBとして示されている。
境界部分断面DMBの形状は、ほぼ楕円であり、長軸JKNと短軸JKTを有する。x軸とy軸とを含む平面の方向が長軸JKNの方向であり、その平面に垂直で回転楕円体である支持部材11Lの中心点と無線検知装置7とを結ぶ直線を含む平面の方向が短軸JKTの方向である。
また、無線検知装置7がx軸およびy軸を含む平面上にある場合は、短軸JKTの中心は長軸JKN上にあるが、無線検知装置7がx軸およびy軸を含む平面から離れるにしたがって、短軸JKTの中心は長軸JKNから離れていくという傾向がある。その場合に、大まかには西洋梨の形状に近くなるといえる。
図27において、長軸JKNおよび短軸JKTの各端部に位置する4つのRFタグ12a〜dを含む平面(境界部分断面DMB)に対して垂直な法線HS上に、無線検知装置7が存在する。
また、距離L1については、第11の実施形態と同様に、短軸JKTの各端部に位置する2つのRFタグ12a〜bを用いて、図23の場合と同様の手続きによって求めることができる。すなわち、その2つのRFタグ12a〜bについての境界線(KK)を導出し、導出した境界線(KK)と法線HSとの交点に無線検知装置7が存在するとして、その間の距離L1を求めることができる。
なお、無線検知装置7が、x軸およびy軸を含む平面上になくその平面の上方または下方に変位している場合は、2つのRFタグ12a〜bについての境界線(KK)は対称にはならない。しかし、その場合に、短軸JKTの各端部における支持部材11Kへの接面と法線HSとの交点から、距離L1を求めることができる。
〔第13の実施形態〕
次に、第13の実施形態の物体検知システム1Nについて説明する。
第13の実施形態では、無線送受信集合装置3Nの支持部材11Nが、その内部または表面に空隙を有した構造となっている。つまり、支持部材11Nは、遮蔽部材である電波不透過部材を用いて形成されるが、その遮蔽部材が均一組成で形成されていない。
図28(a)に示す支持部材11Naは、遮蔽部材を用いて形成された複数のブロックBKが組み合わされて構成される。各ブロックBKの周面は平面ではなく、互いに入り組んだ曲面状であるため、電波が内部に侵入しても裏側にまでは到達しない。
図28(b)に示す支持部材11Nbは、遮蔽部材が網目構造に形成されている。網目の大きさは、使用する電波の波長に対応して内部に電波が侵入できない大きさであり、電波が内部に侵入しても裏側にまでは到達しない。
これら支持部材11Na,bによると、その全体を遮蔽部材で均一な組成で形成した場合と比べて、重量を軽くすることができるにも係わらず、それと同等の電波遮蔽効果を得ることができる。
このように、無線送受信集合装置3Nの支持部材11Nとして、内部に隙間のあるもの、メシュによって形成されたものなど、均一で密なもの以外の種々の構造とすることが可能である。
〔第14の実施形態〕
次に、第14の実施形態の物体検知システム1Pについて説明する。
上の各実施形態では、無線送受信手段としてRFタグ12それ自体を用いた。しかしここに説明する第14の実施形態では、無線送受信集合装置3PにRFタグ12の機能が分割されて配置される。
つまり、第14の実施形態の無線送受信集合装置3Pでは、RFタグ12の機能をアンテナと動作回路本体部分とに分離し、かつ、複数の動作回路本体部分の機能を1つのRFID集中機構に集約し、RFID集中機構に複数のアンテナを接続する。
図29において、正六角柱の形状を有した支持部材11Pに、集積型RFタグ12Pが設けられた例が示されている。図29(a)は外観を示す斜視図、図29(b)は水平断面図である。
図29(a)に示すように、支持部材11Pの周面および上面の合計7箇所に、電波を送信しまたは受信するためのアンテナATがそれぞれ取り付けられている。支持部材11Pの内部に、RFID集中機構12PSが設けられている。RFID集中機構12PSには、7つのアンテナATから延びた導線が接続されている。
RFID集中機構12PSにおいて、7つのアンテナATに対し、それぞれに対応する固有の識別番号を用いて情報を記録する記録エリアが設けられ、それらの情報が管理されている。いずれか1つのアンテナATで受信された情報は、当該アンテナATに対応した識別番号の記録エリアの情報として更新処理が行われる。
また、無線検知装置7に対しては、識別番号で記録されている記録エリアの情報は、対応する当該アンテナATからのみ送信または返信するようになっている。したがって、7つのアンテナATと1つのRFID集中機構12PSの組み合わせにより、7つのRFタグ12と同等の機能が実現されることとなる。
RFID集中機構12PSによって、無線送受信集合装置3Pに設けられた全部のアンテナATからの情報が一元的に把握できるので、無線送受信集合装置3P全体として機能を大幅に高めることができる。
例えば、無線送受信集合装置3Pに対し、2つの無線検知装置7が同時に異なる方向からアクセスし、複数の探索情報や更新情報についての指令が出されることがある。その場合に、第1〜第13の実施形態の無線送受信集合装置3A〜Mでは、個々のRFタグ12が独立して応答を返すので、2つの無線検知装置7の方向は、それぞれ一方の無線検知装置7において他方の無線検知装置7による情報をノイズとして取り除く処理を行う必要がある。
これに対し、第14の実施形態の無線送受信集合装置3Pでは、RFID集中機構12PSにおいて、2つの無線検知装置7から指令が出されていることが認識できる。したがって、それぞれの無線検知装置7の方向をRFID集中機構12PSの内部で判定し、それぞれの無線検知装置7に対し、最適のアンテナATを用いて最適の方向から必要な情報を整理して返信することができる。
また、RFID集中機構12PSに、無線検知装置7またはサーバ8と独自に通信を行って情報の送受信を行うことのできるインタフェースを設けてもよい。
なお、RFID集中機構12PSは、1つの集積回路チップとし、またはCPUチップなどを含めた複数の集積回路チップを搭載した1つのプリント回路基板とし、または複数のプリント回路基板をハウジング内に実装したデバイスとするなど、種々の形態で実現することが可能である。
〔第15の実施形態〕
次に、第15の実施形態の物体検知システム1Qについて説明する。
上の各実施形態では、電磁波として電波を用いることを前提として説明を行った。これに対し、第15の実施形態の物体検知システム1Qでは、電磁波として、可視光線、赤外線、または紫外線などの光線を用いる。
すなわち、図30に、上に述べた第2の実施形態の物体検知システム1Bと同じシステム構成の物体検知システム1Qが示されている。
図30において、物体検知システム1Qは、無線送受信集合装置3Q、無線検知装置7Q、およびサーバ8を備える。無線送受信集合装置3Qは、支持部材11Qおよび光信号送受信器13a〜dを備える。つまり、ここでは、無線送受信手段として、光信号送受信器13a〜dが用いられる。
支持部材11Qは、4つの光信号送受信器13a〜dを支持する機能を有する。つまり、支持部材11Qは、平面視が正方形の直方体状または正四角注状に形成されている。周囲の4つの面HM1〜4のそれぞれほぼ中央部に、光信号送受信器13a〜dが1つずつ配置される。
なお、支持部材11Qの材料として、ここでは光を透過させない不透明部材である遮蔽部材が用いられる。しかし、光信号送受信器13a〜dが必要な指向性を有する限りにおいて、支持部材11Qそれ自体に遮蔽部材を用いなくてもよい。光信号送受信器13a〜dには、指向性の方向以外に光を発射しないように遮蔽部材が用いられるが、光信号送受信器13a〜dが支持部材11Qに取り付けられたときに、光信号送受信器13a〜dのその遮蔽部材が支持部材11Qの一部であるとして扱えばよい。
光信号送受信器13a〜dは、フォトダイオードなどの受光素子、発光ダイオードまたはレーザダイオードなどの発光素子、レンズまたは偏向部材などの光学部材、および、それらを駆動し必要な信号処理を行う動作回路本体部分などが、遮蔽部材を用いて形成された適当なハウジングに納められ、1つのデバイスまたは部品として構成されたものである。
光信号送受信器13の構成の一例が図31(b)に示されている。
図31(b)において、光信号送受信器13は、遮蔽部材などを用いて形成されたハウジング130に、送受信部131、制御処理部132、メモリ133、および光信号接面展開部材135などが設けられる。
送受信部131は、フォトダイオードなどの受光素子、発光ダイオードまたはレーザダイオードなどの発光素子、レンズまたは偏向部材などの光学部材などからなり、光信号の送信および受信を行う。
制御処理部132は、必要な信号処理を行い、光信号送受信器13の全体を制御する。制御処理部132に、電波によってサーバ8などと通信を行って情報の送受信を行うことのできるインタフェースを設けてもよい。
メモリ133は、当該光信号送受信器13の識別情報DS、その他の種々の情報などを記憶する。
光信号接面展開部材135は、遮蔽部材、レンズ、反射部材、偏向部材などの光学部材が適当に組み合わされたものである。光信号接面展開部材135によって、送受信部131による送受信の指向性の範囲が、前方180度の範囲となるように拡大される。
このように、光信号送受信器13a〜dは、遮蔽部材、レンズ、反射部材などが適当に組み合わされ、その前方180度の範囲において無線検知装置7Qとの間の送受信が可能となるように構成されている。
無線送受信集合装置3Qにおいては、光信号送受信器13に指向性を与えるのは、光信号送受信器13に用いられたハウジング130および光信号接面展開部材135などである。この場合に、ハウジング130は遮蔽部材として機能する。しかし、光信号送受信器13それ自体によって指向性を得るのではなく、それらと支持部材11に組み込まれた遮蔽部材とを組み合わせることによって指向性を得るようにしてもよい。
無線検知装置7Qは、光信号送受信器13との間でデータの送受信が可能であり、無線送受信集合装置3Qおよび光信号送受信器13に対して相対的に移動可能である。
図31(a)において、無線検知装置7Qは、合成樹脂などからなるケーシング70Qに、送受信部71Q、制御処理部72Q、メモリ73Q、表示部74Qなどが設けられて構成される。
送受信部71Qは、フォトダイオードなどの受光素子、発光ダイオードまたはレーザダイオードなどの発光素子、レンズまたは偏向部材などの光学部材などを備え、光信号送受信器13との間で光信号による送受信を行う。送受信部71Qは、その前方の空間における所定の検知角αの範囲(検知用光範囲)DKにおいて光信号を発射し、その範囲DKにおいて光信号送受信器13との間の送受信が可能である。
無線送受信集合装置3Qは、支持部材11Q各面HM1〜4が、つまり光信号送受信器13a〜dの各指向性の正面が、それぞれ、西、南、東、北を向くように配置される。
各面HM1〜4への接面または指向性の限界面が、境界面KK1〜4である。各境界面KK1〜4の前方が、各光信号送受信器13a〜dについて指向性を持った検知可能領域EK1〜4である。
したがって、例えば、無線検知装置7Qが図30に示す位置にあるときに、その位置は検知可能領域EK1でもありかつ検知可能領域EK2でもある。この場合に、無線検知装置7Qは、2つの光信号送受信器13a、13bと同時に送受信を行うことが可能である。
この場合に、2つの光信号送受信器13a、13bと実際に送受信を行ったとすると、無線検知装置7Qは、2つの検知可能領域EK1、2の重なる領域、つまり識別可能領域ES1に存在したこととなり、これが無線検知装置7Qの物体存在領域EEとして検知される。
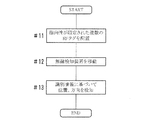
次に、上に述べた物体検知システム1,1B〜Qにおける検知の概略の手順をフローチャートに基づいて説明する。
図32において、複数のRFタグ12などを適当な支持部材11などに配置し、それらの指向性を限定する(#11)。その場合に、支持部材11それ自体、または支持部材11の表面などに適用された遮蔽部材によって、RFタグ12などの指向性を限定する。または、支持部材11とは別の遮蔽部材を用い、RFタグ12などをその遮蔽部材の表面に配置しまたは埋め込むことによって、指向性を限定するようにしてもよい。このようにして、例えば無線送受信集合装置3などを形成する。必要な情報を、RFタグ12、無線検知装置7、サーバ8などに記録しまたは登録する。
無線検知装置7などを物体BTとともに移動させる(#12)。このとき、無線検知装置7などを必要に応じて回転し、適当な方向に向くようにする。
無線検知装置7がRFタグ12などを検知し、識別情報DSを得ると、得られた識別情報DSに基づいて、または得られなかった識別情報DSに基づいて、無線検知装置7の位置、方向などを判断する(#13)。無線検知装置7の位置、方向などを判断するに際して、RFタグ12などの指向性によって識別される複数の識別可能領域ESのうちのいずれの領域に存在するかを検知する。
なお、必要に応じて、無線検知装置7などに複数のRFタグ12などの識別情報DSを予め記憶させておけばよい。
以上、種々の実施形態において述べたように、無線送受信集合装置3A〜Qおよび無線検知装置7,7Qを使用目的に合わせて製作し、必要な箇所に必要な個数の無線送受信集合装置3を設置し、互いに独立した必要な個数の無線検知装置7,7Qを用いることにより、各無線検知装置7,7Qと一体に移動する物体BTの方向、距離、位置などをリアルタイムで検知することができる。この場合に、無線送受信集合装置3A〜Qを設置する箇所は固定されている必要はなく、動いていてもよい。
上に述べた各実施形態において、タグ登録データTTG1として、探索物品情報を集合装置情報JSに含ませて記録しておいてもよいことを述べた。これによって、RFタグ12または光信号送受信器13を検知することにより、探索物品情報に基づいて、物品などの探索を行うことができる。
すなわち、無線検知装置7,7Qが検知したRFタグ12または光信号送受信器13から送られた識別情報DSに基づいて、それに対応した探索物品情報を得ることにより、無線検知装置7,7Qを操作するユーザは探索しようとする物品の位置、方向などを知ることができる。
探索物品情報として、例えば、無線送受信集合装置3と関連付けられている機器、装置、設備、備品、道具、物品、商品、書籍、書類、美術品、貴重品、医薬品、食品、材料品、梱包物、ビン、缶、ペットボトル、トレイ、構築物、建物、柱、壁面、天井面、床面、建具、什器、工場、プラント、配管、配線、港湾、農場、ビニールハウス、温室、駅構内、空港内、乗降場、駐車場、駐輪場、乗り物、街路、歩道、出入り口、通過ゲート、窓、通路、図書館、美術館、博物館、映画館、劇場、百貨店、地下街、スーパーマーケット、コンビニ、ドラッグストア、家電量販店、パソコンショップ、カー用品店、ショッピングモール、ホームセンター、レンタルショップ、介護ベッド、介護用品、衣料、装身具、収納棚、パレット、掲示物、案内物、観光地、神社仏閣、レジャー施設、遊園地、遊技場、ゲーム機、人物、動物、ペット、植物、鉱物、またはそれらの個別構成部品などについての情報とすることができる。これによって、それらの探索や追跡が可能となる。
また、無線送受信集合装置3A〜Qが固定されていて、その固定箇所の位置が別の手段で特定されている場合には、無線送受信集合装置3からの位置関係、例えば方向と距離によって、無線検知装置7,7Qの現在位置の把握が容易に実現できる。これにより、当該無線検知装置7,7Qに関連付けられている機器、装置、備品、道具、物品、商品、乗り物、車椅子、介護用品、装身具、ゲーム機、人物、動物、ペット、装備などについて、その所在位置を容易に確認することが可能である。
上に述べた各実施形態において、RFタグ12および光信号送受信器13は、自らの識別情報DSを無線検知装置7,7Qに送信し、無線検知装置7,7Qにおいて、受信した識別情報DSに基づいて種々の処理を行い、領域、位置、方向、距離などを検知した。
しかし、そのような識別情報DSとして、RFタグ12または光信号送受信器13それ自体における位置情報、指向性に関する情報、境界面(境界線)KKに関する情報、検知可能領域EKに関する情報などを記憶しておいて送信し、それらの情報を無線検知装置7,7Qが受信するようにしてもよい。このようにした場合には、無線検知装置7,7Qまたはサーバ8において、RFタグ12または光信号送受信器13と識別情報DSとの対応関係を予め記録しておく必要がなくなる。
なお、その場合に、無線検知装置7,7Qにおいて、またはサーバ8において、それらの情報に基づいて物体存在領域EE、方向、距離などを検知すればよい。
上に述べた各実施形態において、無線送受信手段として、RFタグ12、アンテナATとRFID集中機構12PS、または光信号送受信器13を用いた。しかし、これら以外に、使用目的などに応じて、種々の構成の無線送受信手段を用いることができる。例えば、使用する周波数または波長、空中線電力または出力電力、指向性、送受信する情報の内容、送受信の手順などを、使用目的または規模などに応じて選定すればよい。また、無線送受信手段の形態を、1つの集積回路チップ、複数の集積回路チップを搭載したプリント回路基板、または複数のプリント回路基板をハウジング内に実装したデバイスなど、種々の形態の無線機器とすることが可能である。
上に述べた各実施形態において、無線送受信集合装置3A〜Qは、使用目的などに応じて種々のサイズとすることができる。例えば、直径または一辺の長さが数センチメートル〜十センチメートル程度の小型のもの、十センチメートル程度〜数十センチメートル程度の中型のもの、数十センチメートル程度〜1メートル程度の大型のもの、1メートル程度以上の超大型のものなど、使用目的や規模などに応じてサイズを選定すればよい。その場合に、取り付ける無線送受信手段の仕様および個数なども、適当なものを選定すればよい。
また、無線送受信手段それ自体に指向性を持たせた場合に、指向性を生じさせるために無線送受信手段に用いられている遮蔽部材は、支持部材11,11A〜Qの一部であるとして扱えばよい。
上に述べた各実施形態において述べた事項は、矛盾がない限り当該実施形態以外の実施形態についても適用することができる。また、各実施形態において述べた事項を必要に応じて互いに組み合わせることも可能である。
上に述べた各実施形態において、支持部材11A〜Q、RFタグ12、光信号送受信器13、無線送受信集合装置3A〜Q、無線検知装置7,7Q、物体検知システム1,1B〜Qの各部または全体の構成、構造、形状、寸法、個数、配置、材料、形成方法、形成順序、判断方法、処理方法、演算方法などは、本発明の主旨に沿って適宜変更することができる。