JP5506420B2 - 4点接触玉軸受のトルク計算方法・計算装置・および計算プログラム - Google Patents
4点接触玉軸受のトルク計算方法・計算装置・および計算プログラム Download PDFInfo
- Publication number
- JP5506420B2 JP5506420B2 JP2010010259A JP2010010259A JP5506420B2 JP 5506420 B2 JP5506420 B2 JP 5506420B2 JP 2010010259 A JP2010010259 A JP 2010010259A JP 2010010259 A JP2010010259 A JP 2010010259A JP 5506420 B2 JP5506420 B2 JP 5506420B2
- Authority
- JP
- Japan
- Prior art keywords
- torque
- point contact
- calculation
- sum
- calculating
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01M—TESTING STATIC OR DYNAMIC BALANCE OF MACHINES OR STRUCTURES; TESTING OF STRUCTURES OR APPARATUS, NOT OTHERWISE PROVIDED FOR
- G01M13/00—Testing of machine parts
- G01M13/04—Bearings
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C19/00—Bearings with rolling contact, for exclusively rotary movement
- F16C19/02—Bearings with rolling contact, for exclusively rotary movement with bearing balls essentially of the same size in one or more circular rows
- F16C19/14—Bearings with rolling contact, for exclusively rotary movement with bearing balls essentially of the same size in one or more circular rows for both radial and axial load
- F16C19/16—Bearings with rolling contact, for exclusively rotary movement with bearing balls essentially of the same size in one or more circular rows for both radial and axial load with a single row of balls
- F16C19/163—Bearings with rolling contact, for exclusively rotary movement with bearing balls essentially of the same size in one or more circular rows for both radial and axial load with a single row of balls with angular contact
- F16C19/166—Four-point-contact ball bearings
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C19/00—Bearings with rolling contact, for exclusively rotary movement
- F16C19/02—Bearings with rolling contact, for exclusively rotary movement with bearing balls essentially of the same size in one or more circular rows
- F16C19/14—Bearings with rolling contact, for exclusively rotary movement with bearing balls essentially of the same size in one or more circular rows for both radial and axial load
- F16C19/18—Bearings with rolling contact, for exclusively rotary movement with bearing balls essentially of the same size in one or more circular rows for both radial and axial load with two or more rows of balls
- F16C19/181—Bearings with rolling contact, for exclusively rotary movement with bearing balls essentially of the same size in one or more circular rows for both radial and axial load with two or more rows of balls with angular contact
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L3/00—Measuring torque, work, mechanical power, or mechanical efficiency, in general
- G01L3/02—Rotary-transmission dynamometers
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C2300/00—Application independent of particular apparatuses
- F16C2300/10—Application independent of particular apparatuses related to size
- F16C2300/14—Large applications, e.g. bearings having an inner diameter exceeding 500 mm
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C2316/00—Apparatus in health or amusement
- F16C2316/10—Apparatus in health or amusement in medical appliances, e.g. in diagnosis, dentistry, instruments, prostheses, medical imaging appliances
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C2360/00—Engines or pumps
- F16C2360/31—Wind motors
Description
<従来計算式>
T= μ×dm/2×Poa
T :回転トルク [kN ・ m]
μ: 摩擦係数
dm :ボールPCD[m]
P oa : 静等価アキシアル 荷重[kN]
このトルク計算方法は、4点接触玉軸受の内外輪間に作用する回転トルクを計算する方法であって、
転動体毎に回転トルクTを計算する個別トルク計算過程と、
全転動体の回転トルクTの和を求めてその和を前記内外輪間に作用する回転トルクとする総和計算過程とを含み、
前記個別トルク計算過程では、2点接触状態と4点接触状態とのいずれに近いかの程度である接触状態にかかる情報を用いて計算する、
ことを特徴とする。
具体的には、
前記個別トルク計算過程では、個々の転動体における、内輪もしくは外輪の2つの軌道面と転動体とのそれぞれの最大接触圧力P 1 ,P 2 を1つのパラメータで代表するための接触圧力和P S を、次式
P S =(P 1 4 +P 2 4 ) 1/4
によって求め、
次式
C f = min(P 1 ,P 2 )/ max(P 1 ,P 2 ) 0≦C f ≦1
min(P 1 ,P 2 ):P 1 ,P 2 のうち小さい方の値、
max(P 1 ,P 2 ):P 1 ,P 2 のうち大きい方の値、
によって定められる大きい方の圧力に対する小さい方の圧力の比である4点接触率C f を計算し、
0≦C f ≦0.5の場合は、
T=(4点接触率C f の二次関数)×C×P S 4
(ただし、Cは軸受毎に定められた定数)
とし、
0.5≦C f ≦1の場合は、
T=I×C×P S 4 (ただし、Iは8〜12の間で定められた定数)
として回転トルクTを計算する。
また、4点接触率Cf が0〜0.5未満の場合の回転トルクTを、4点接触率Cf の二次関数で補完された値としても良い。
上記のように、4点接触率Cf が0.5以上の場合はトルクはほぼ一定となり、Cf =0の場合と比較して、8〜12倍のトルクとなり、4点接触率Cf が0〜0.5未満の場合は放物線状に変化するためである。
転動体毎の接触圧力を計算する過程と、
転動体毎の回転トルクTを計算する個別トルク計算過程と、
全転動体の回転トルクTの和を求めてその和を前記内外輪間に作用する回転トルクT0とする総和計算過程とを含み、
前記個別トルク計算手段は、軸受に作用する荷重(Fr(Fx、Fy)、Fa、M(Mx、My))、お
よび軸受毎に定められた係数Cを入力して記憶領域に記憶する入力過程と、
計算過程で求めた個々の転動体における、内輪もしくは外輪の2つの軌道面と転動体とのそれぞれの最大接触圧力P1 ,P2 を1つのパラメータで代表するための接触圧力和PS を、次式
PS =(P1 4 +P2 4 )1/4
によって求める接触圧力和計算過程と、
次式 Cf = min(P1 ,P2 )/ max(P1 ,P2 ) 0≦Cf ≦1
min(P1 ,P2 ):P1 ,P2 のうち小さい方の値、
max(P1 ,P2 ):P1 ,P2 のうち大きい方の値、
によって定められる大きい方の圧力に対する小さい方の圧力の比である4点接触率Cf を計算する4点接触率計算過程と、
0≦Cf <0.5の場合は、
T=(4点接触率Cf の二次関数)×C×PS 4
とし、
0.5≦Cf ≦1の場合は、
T=I×C×PS 4 (ただし、Iは8〜12の間で定められた定数)
として回転トルクTを計算する接触率別トルク計算過程とでなる、
ことを特徴とする。
転動体毎の回転トルクTを計算する個別トルク計算過程と、
全転動体の回転トルクTの和を求めてその和を前記内外輪間に作用する回転トルクT0とする総和計算過程とを含み、
前記個別トルク計算手段は、個々の転動体における、内輪の2つの軌道面と転動体とのそれぞれの最大接触圧力P1 ,P2 、および軸受毎に定められた係数Cが入力されて記憶領域に記憶する入力過程と、
上記2つの最大接触圧力P1 ,P2 を1つのパラメータで代表するための接触圧力和PS を、次式
PS =(P1 4 +P2 4 )1/4
によって求める接触圧力和計算過程と、
次式 Cf = min(P1 ,P2 )/ max(P1 ,P2 ) 0≦Cf ≦1
min(P1 ,P2 ):P1 ,P2 のうち小さい方の値、
max(P1 ,P2 ):P1 ,P2 のうち小さい方の値、
によって定められる大きい方の圧力に対する小さい方の圧力の比である4点接触率Cf を計算する4点接触率計算過程と、
これら接触圧力和PS 、4点接触率Cf 、および前記係数Cを用い、
0≦Cf <0.5の場合は、
T=(4点接触率Cf の二次関数)×C×PS 4
とし、
0.5≦Cf ≦1の場合は、
T=ICPS 4 (ただし、Iは8〜12の間で定められた定数)
として回転トルクTを計算する接触率別トルク計算過程とでなる、
ことを特徴とする。
上記最大接触圧力P1 ,P2 は、検討の荷重条件に応じて計算された値とする。
この発明における上記いずれかのトルク計算方法は、風車のヨー用の軸受に適用しても良い。
この発明における上記いずれかのトルク計算方法は、医療機用の軸受に適用しても良い。
転動体毎の接触圧力または接触応力を計算する手段と、
転動体毎の回転トルクTを計算する個別トルク計算手段と、
全転動体の回転トルクTの和を求めてその和を前記内外輪間に作用する回転トルクT0とする総和計算手段とを含み、
前記個別トルク計算手段は、軸受に作用する荷重(Fr(Fx、Fy)、Fa、M(Mx、My))、お
よび軸受毎に定められた係数Cを入力して記憶領域に記憶する入力部と、
計算過程で求めた個々の転動体における、内輪もしくは外輪の2つの軌道面と転動体とのそれぞれの最大接触圧力P1 ,P2を1つのパラメータで代表するための接触圧力和PS
を、次式
PS =(P1 4 +P2 4 )1/4
によって求める接触圧力和計算部と、
次式 Cf = min(P1 ,P2 )/ max(P1 ,P2 ) 0≦Cf ≦1
min(P1 ,P2 ):P1 ,P2 のうち小さい方の値、
max(P1 ,P2 ):P1 ,P2 のうち大きい方の値、
によって定められる大きい方の圧力に対する小さい方の圧力の比である4点接触率Cf を計算する4点接触率計算部と、
0≦Cf <0.5の場合は、
T=(4点接触率Cf の二次関数)×C×PS 4
とし、
0.5≦Cf ≦1の場合は、
T=I×C×PS 4 (ただし、Iは8〜12の間で定められた定数)
として回転トルクTを計算する接触率別トルク計算部とでなる。
転動体毎の回転トルクTを計算する個別トルク計算手段13と、
全転動体の回転トルクTの和を求めてその和を前記内外輪間に作用する回転トルクT0とする総和計算手段14とを含み、
前記個別トルク計算手段13は、個々の転動体における、内輪の2つの軌道面と転動体とのそれぞれの最大接触圧力P1 ,P2 、および軸受毎に定められた係数Cが入力されて記憶領域に記憶する入力部15と、
上記2つの最大接触圧力P1 ,P2 を1つのパラメータで代表するための接触圧力和PS を、次式
PS =(P1 4 +P2 4 )1/4
によって求める接触圧力和計算部16と、
次式 Cf = min(P1 ,P2 )/ max(P1 ,P2 ) 0≦Cf ≦1
min(P1 ,P2 ):P1 ,P2 のうち小さい方の値、
max(P1 ,P2 ):P1 ,P2 のうち大きい方の値、
によって定められる大きい方の圧力に対する小さい方の圧力の比である4点接触率Cf を計算する4点接触率計算部17と、
0≦Cf <0.5の場合は、
T=(4点接触率Cf の二次関数)×C×PS 4
とし、
0.5≦Cf ≦1の場合は、
T=I×C×PS 4 (ただし、Iは8〜12の間で定められた定数)
として回転トルクTを計算する接触率別トルク計算部18とでなる、
ことを特徴とする。
T=(1+36Cf 2 )CPS 4
に従って行っても良い。
転動体毎の接触圧力を計算する手順と、
転動体毎の回転トルクTを計算する個別トルク計算手順と、
全転動体の回転トルクTの和を求めてその和を前記内外輪間に作用する回転トルクT0とする総和計算手順とを含み、
前記個別トルク計算手段は、軸受に作用する荷重(Fr(Fx、Fy)、Fa、M(Mx、My))、お
よび軸受毎に定められた係数Cを入力して記憶領域に記憶する入力手順と、
計算過程で求めた個々の転動体における、内輪もしくは外輪の2つの軌道面と転動体とのそれぞれの最大接触圧力P1 ,P2を1つのパラメータで代表するための接触圧力和PS
を、次式
PS =(P1 4 +P2 4 )1/4
によって求める接触圧力和計算手順と、
次式 Cf = min(P1 ,P2 )/ max(P1 ,P2 ) 0≦Cf ≦1 min(P1 ,P2 ):P1 ,P2 のうち小さい方の値、
max(P1 ,P2 ):P1 ,P2 のうち大きい方の値、
によって定められる大きい方の圧力に対する小さい方の圧力の比である4点接触率Cf を計算する4点接触率計算手順と、
これら接触圧力和PS 、4点接触率Cf 、および前記係数Cを用い、
0≦Cf <0.5の場合は、
T=(4点接触率Cf の二次関数)×C×PS 4
とし、
0.5≦Cf ≦1の場合は、
T=I×C×PS 4 (ただし、Iは8〜12の間で定められた定数)
として回転トルクTを計算する接触率別トルク計算手順とでなる。
転動体毎の回転トルクTを計算する個別トルク計算手順と、
全転動体の回転トルクTの和を求めてその和を前記内外輪間に作用する回転トルクT0とする総和計算手順とを含み、
前記個別トルク計算手順は、個々の転動体における、内輪の2つの軌道面と転動体とのそれぞれの最大接触圧力P1 ,P2 、および軸受毎に定められた係数Cが入力されると記憶領域に記憶する入力手順と、
上記2つの最大接触圧力P1 ,P2 を1つのパラメータで代表するための接触圧力和PS を、次式
PS =(P1 4 +P2 4 )1/4
によって求める接触圧力和計算手順と、
次式 Cf = min(P1 ,P2 )/ max(P1 ,P2 ) 0≦Cf ≦1
min(P1 ,P2 ):P1 ,P2 のうち小さい方の値、
max(P1 ,P2 ):P1 ,P2 のうち大きい方の値、
によって定められる大きい方の圧力に対する小さい方の圧力の比である4点接触率Cf を計算する4点接触率計算手順と、
0≦Cf <0.5の場合は、
T=(4点接触率Cf の二次関数)×C×PS 4
とし、
0.5≦Cf ≦1の場合は、
T=I×C×PS 4 (ただし、Iは8〜12の間で定められた定数)
として回転トルクTを計算する接触率別トルク計算手順とでなる。
T=(1+36Cf 2 )CPS 4
に従って行っても良い。
個別トルク計算過程V1の具体的な内容を、図5(B)に示し、また図6に、各過程の内容を計算式と共に示す。
この後、検討の荷重条件によって、内輪の2つの軌道面1a,1a(図1)と転動体3とのそれぞれの最大接触圧力P1 ,P2 を計算する。この最大接触圧力P1 ,P2 の計算については、後に、この発明でトルク計算に用いる新計算式の理論の確立についての説明欄で説明する。
個別トルク計算過程V1は、入力過程(W1)、接触圧力和計算過程(W2)、4点接触率計算過程(W3)、および接触率別トルク計算過程(W4)からなる。入力過程(W1)は上述の通りである。
PS =(P1 4 +P2 4 )1/4
によって求める過程である。
4点接触率計算過程(W3)は、
次式 Cf = min(P1 ,P2 )/ max(P1 ,P2 ) 0≦Cf ≦1
min(P1 ,P2 ):P1 ,P2 のうち小さい方の値、
max(P1 ,P2 ):P1 ,P2 のうち大きい方の値、
によって定められる大きい方の圧力に対する小さい方の圧力の比である4点接触率Cf を計算する過程である。
図6のステップU3は、図5(B)のステップW1〜W3を纏めて示している。
上記接触圧力和PS 、4点接触率Cf 、および前記係数Cを用い、
0≦Cf <0.5の場合は、
T=(4点接触率Cf の二次関数)×C×PS 4
とし、
0.5≦Cf ≦1の場合は、
T=I×C×PS 4 (ただし、Iは8〜12の間で定められた定数)
として回転トルクTを計算する過程である。
上記の「(4点接触率Cf の二次関数)」は、(1+36Cf 2 )とすることが好ましい。また、上記Iは、10が一般的には最も好ましいと考えられる。
したがって、具体的には、
0≦Cf <0.5の場合は、
T=(1+36Cf 2 )CPS 4
とし、
0.5≦Cf ≦1の場合は、
T=10CPS 4
とすることが好ましい。
数式で示すと、次式(1)で求められる全転動体の回転トルクΣTを計算する。なお、Zは転動体の個数である。

上記のトルク計算方法を導いた理論、および検証結果は、後に説明する。
転動体毎の回転トルクTを計算する個別トルク計算手順(R1)と、
全転動体の回転トルクTの和を求めてその和を前記内外輪間に作用する回転トルクT0とする総和計算手順(R2)とを含む。なお、転動体毎の接触圧力または接触応力を計算する手順(R0)は、このトルク計算プログラムの一部として設けられていても、またこのトルク計算プログラム9とは別に設けられていてもよい。
個別トルク計算手順(R1)は、入力手順(S1)、接触圧力和計算手順(S2)、4点接触率計算手順(S3)、および接触率別トルク計算手順(S4)からなる。
PS =(P1 4 +P2 4 )1/4
によって求める手順である。
4点接触率計算手順(S3)は、
次式 Cf = min(P1 ,P2 )/ max(P1 ,P2 ) 0≦Cf ≦1
min(P1 ,P2 ):P1 ,P2 のうち小さい方の値、
max(P1 ,P2 ):P1 ,P2 のうち大きい方の値、
によって定められる大きい方の圧力に対する小さい方の圧力の比である4点接触率Cf を計算する手順である。
0≦Cf <0.5の場合は、
T=(4点接触率Cf の二次関数)×C×PS 4
とし、
0.5≦Cf ≦1の場合は、
T=I×C×PS 4 (ただし、Iは8〜12の間で定められた定数)
として回転トルクTを計算する手順である。
したがって、具体的には、
0≦Cf <0.5の場合は、
T=(1+36Cf 2 )CPS 4
とし、
0.5≦Cf ≦1の場合は、
T=10CPS 4
とすることが好ましい。
タと上記係数Cが入力されると、所定の記憶領域に記憶させる機能を有していてもよい。
接触圧力和計算部16は、上記の入力された2つの最大接触圧力P1 ,P2 を1つのパラメータで代表するための接触圧力和PS を、次式
PS =(P1 4 +P2 4 )1/4
によって求める手段である。
4点接触率計算部17は、
次式 Cf = min(P1 ,P2 )/ max(P1 ,P2 ) 0≦Cf ≦1
min(P1 ,P2 ):P1 ,P2 のうち小さい方の値、
max(P1 ,P2 ):P1 ,P2 のうち大きい方の値、
によって定められる大きい方の圧力に対する小さい方の圧力の比である4点接触率Cf を計算する手段である。
0≦Cf <0.5の場合は、
T=(4点接触率Cf の二次関数)×C×PS 4
とし、
0.5≦Cf ≦1の場合は、
T=I×C×PS 4 (ただし、Iは8〜12の間で定められた定数)
として回転トルクTを計算する手段である。
したがって、具体的には、
0≦Cf <0.5の場合は、
T=(1+36Cf 2 )CPS 4
とし、
0.5≦Cf ≦1の場合は、
T=10CPS 4
とすることが好ましい。
本出願人で開発した数値解析ツールにより、軌道面と転動体との接触状態と回転トルクとの関係について検討した。本解析ツールでは1つの転動体による回転トルクの計算を行う。なお、回転トルクの計算は、内外輪の位置を拘束し、力とモーメントの釣り合いから求めた転動体の中心位置や自転と公転の速度と向きを利用し、軌道輪に生じる中心軸回りの回転トルクを求める。転動体に作用する力としては、4つの軌道面からの弾性接触による力、および玉の自転と公転を考慮した上で、転動体と軌道面との滑り速度分布をその接触楕円内で求め、この滑り分布より求めた摩擦力を考える。モーメントとしては、この摩擦力によるものを考える。図8のように外輪を固定した状態で、内輪のラジアルおよびアキシアル方向の変位を与え、その状態での転動体の力とモーメントの釣り合い式が全て0となるように、転動体の中心位置や自転と公転の速度と向きを変えながら、収束計算させる。その結果、転動体の位置などが出力される。なお、軸受トルクとして考慮される要因は、接触部内の滑りによる摩擦のみとした。またこの摩擦係数は、境界潤滑を想定したもので、滑り速度のみの関数としたものを採用した。
ここで、上記の転動体の力とモーメントの収束計算を全ての転動体に適用させることで軸受全体のトルク計算も技術的には可能だが、長い計算時間を要したり、あるいは収束しがたい状態に陥ったりするため、本発明の計算手法の方が短時間で安定して結果を得ることができる。
Cf = min(P1 ,P2 )/ max(P1 ,P2 ) 0≦Cf ≦1
min(P1 ,P2 ):P1 ,P2 のうち小さい方の値、
max(P1 ,P2 ):P1 ,P2 のうち大きい方の値、
したがって、Cf =0の時は完全な2点接触状態であり、Cf =1の時は純ラジアル荷重を負荷した時のように、P1 =P2 の4点接触状態となる。
PS =(P1 4 +P2 4 )1/4
これは以下の関係から接触圧力の4乗が回転トルクに比例すると考えられるからである。Pc∝Q1/3 (Heltz の点接触理論)
T ∝Q1.33((Palmgrenの実験回帰式)
∴T∝P3.99 (3.99≒4)
P:接触圧力
Q:転動体荷重
T:回転トルク
これらの結果から、新トルク計算式〔転動体1個のトルク:T〕を以下のように決定した。
T=(1+36Cf 2 )CPS 4 (0≦Cf ≦0.5の場合)
T=10CPS 4 (0.5≦Cf ≦1の場合)
ここでCは軸受の諸元(転動体や軌道面の幾何形状) 、すなわち軸受毎に決まる係数である。
(荷重成分毎の回転トルク検証)
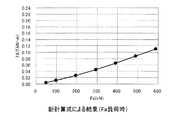
新計算式の妥当性を確認するため、外径φ500mm のモデル軸受を製作し、アキシアル、ラジアル、モーメントの各荷重が変化した場合の回転トルクの影響を確認した。トルク測定方法については図12に示す。
この試験機では、アキシアル荷重は純アキシアル荷重のみ負荷でき、ラジアル荷重は軸受中心から軸方向に、h=0.5、0.75、1.0m離れた各位置(図12のh)で負荷することによりモーメント荷重を発生させる。
軸受:モデル軸受( 複列4点接触玉軸受)
寸法: φ335(内径) ×φ500(外径)x 121( 幅)
質量:70kg
Coa : 2090kN
温度:室温約25℃
回転速度:1nin -1
グリース:軌道面に塗布程度
試験結果を図13(Fa負荷時) 、図14(Fr+M負荷時) に示す。図8の試験機のダミー軸受は別途トルク試験を実施し、実測値から差引きすることでモデル軸受の回転トルクを求めている。
また、新計算式の結果を図15,16に、現行計算式の結果を図17,18に示す。なお、現行計算式ではμ=0.0015 を採用した。
図13,図14の試験の結果、回転トルクはアキシアル荷重、ラジアル荷重共に比例関係にあるのに対し、モーメント荷重を増加した場合でも回転トルクはあまり変化しない結果になった。この結果は新計算式とは良く一致しているが、従来計算式では一致しない。
これは、転動体の接触状態( 2点接触状態もしくは4点接触状態) によるものと考えられる。h=0.5mの場合、モーメント荷重が小さく、純ラジアル荷重に近いため、負荷域転動体は4点接触状態が支配的となる。一方で、h=1.0mとなるとモーメント荷重の影響により4点接触状態から2点接触状態へと移行するため(Cf が0に近づくため) 、転動体荷重は増加するものの回転トルクは増加しない。
更なる検証のため、同モデル軸受を用いて追加試験を実施した。
1)目的
初期すきま( 負すきま) を変化させ、その状態からアキシアル荷重を負荷した時に、回転トルクがどのように変化するか実測し、新計算式の整合性を検証する。
2)試験条件
軸受:モデル軸受(複列4点接触玉軸受、上記の試験軸受と同じ)
寸法: φ335 ×φ500 ×121
荷重:Fa=O 〜588kN
初期すきま( 負すきま) 、接触応力:
(1) δa=−40μm ,Pmax =1042MPa,Cf =1,Ps=1240MPa
(2) δa=−70μm ,Pmax =1382MPa,Cf =1,Ps=1644MPa
温度:室温約25°C
回転速度:1 min-1
試験結果を図19に、計算結果を図20に示す。
(1) Fa=0(予圧荷重のみ) での実測値は計算値と良く一致した。これは、新計算式のCf =1と、Cf =0のトルク比例が10倍となることが、実測でも確認されたといえる。
(2) Faの増加により、一旦はトルクが上昇し、その後低下、その後再度増加するという傾向は、試験と計算式とでよく一致した。これは、4点接触率Cf が0.5より大きい状態では、接触圧力の増加に伴いトルクも増加するが、Cf が0.5を下回ると自転軸の変化により軸受摩擦係数が低下するため、軸受トルクは減少する。しなしながら、完全な2点接触状態(Cf =0)下では再度圧力の増加に伴い軸受トルクも増加する。ここで、極小値付近の変化の特性については、4点接触状態から完全な2点接触状態に移行する過渡期は計算と実際の接触状態とでは異なることが要因と考えられる。
2…外輪
3…転動体
5…コンピュータ
9…4点接触玉軸受のトルク計算プログラム
13…個別トルク計算手段
14…総和計算手段
15…入力部
16…接触圧力和計算部
17…4点接触率計算部
18…接触率別トルク計算部
31…風車
36…ブレード
41,42…軸受
50…CTスキャナ
52…軸受
Claims (17)
- 4点接触玉軸受の内外輪間に作用する回転トルクT0を計算する方法であって、
転動体毎に回転トルクTを計算する個別トルク計算過程と、
全転動体の回転トルクTの和を求めてその和を前記内外輪間に作用する回転トルクT0とする総和計算過程とを含み、
前記個別トルク計算過程では、2点接触状態と4点接触状態とのいずれに近いかの程度である接触状態にかかる情報を用いて計算する、
ことを特徴とする4点接触玉軸受のトルク計算方法。 - 4点接触玉軸受の内外輪間に作用する回転トルクT0を計算する方法であって、
転動体毎に回転トルクTを計算する個別トルク計算過程と、
全転動体の回転トルクTの和を求めてその和を前記内外輪間に作用する回転トルクT0とする総和計算過程とを含み、
前記個別トルク計算過程では、個々の転動体における、内輪もしくは外輪の2つの軌道面と転動体とのそれぞれの最大接触圧力P 1 ,P 2 を1つのパラメータで代表するための接触圧力和P S を、次式
P S =(P 1 4 +P 2 4 ) 1/4
によって求め、
次式
C f = min(P 1 ,P 2 )/ max(P 1 ,P 2 ) 0≦C f ≦1
min(P 1 ,P 2 ):P 1 ,P 2 のうち小さい方の値、
max(P 1 ,P 2 ):P 1 ,P 2 のうち大きい方の値、
によって定められる大きい方の圧力に対する小さい方の圧力の比である4点接触率C f を計算し、
0≦C f ≦0.5の場合は、
T=(4点接触率C f の二次関数)×C×P S 4
(ただし、Cは軸受毎に定められた定数)
とし、
0.5≦C f ≦1の場合は、
T=I×C×P S 4 (ただし、Iは8〜12の間で定められた定数)
として回転トルクTを計算する、
ことを特徴とする4点接触玉軸受のトルク計算方法。 - 請求項2において、
0.5≦Cf ≦1の場合は、
T=10CPS 4
として回転トルクTを計算する4点接触玉軸受のトルク計算方法。 - 請求項1ないし請求項3のいずれか1項に記載の4点接触玉軸受のトルク計算方法であって、前記個別トルク計算過程および総和計算過程を、コンピュータを用いて計算する4点接触玉軸受のトルク計算方法。
- 4点接触玉軸受の内外輪間に作用する回転トルクT0を、コンピュータを用いて計算する方法であって、
転動体毎の接触圧力を計算する過程と、
転動体毎の回転トルクTを計算する個別トルク計算過程と、
全転動体の回転トルクTの和を求めてその和を前記内外輪間に作用する回転トルクT0とする総和計算過程とを含み、
前記個別トルク計算過程は、軸受に作用する荷重(Fr(Fx、Fy)、Fa、M(Mx、My))、お
よび軸受毎に定められた係数Cを入力して記憶領域に記憶する入力過程と、
計算過程で求めた個々の転動体における、内輪もしくは外輪の2つの軌道面と転動体とのそれぞれの最大接触圧力P1 ,P2 を1つのパラメータで代表するための接触圧力和PS を、次式
PS =(P1 4 +P2 4 )1/4
によって求める接触圧力和計算過程と、
次式 Cf = min(P1 ,P2 )/ max(P1 ,P2 ) 0≦Cf ≦1
min(P1 ,P2 ):P1 ,P2 のうち小さい方の値、
max(P1 ,P2 ):P1 ,P2 のうち大きい方の値、
によって定められる大きい方の圧力に対する小さい方の圧力の比である4点接触率Cf を計算する4点接触率計算過程と、
0≦Cf <0.5の場合は、
T=(4点接触率Cf の二次関数)×C×PS 4
とし、
0.5≦Cf ≦1の場合は、
T=I×C×PS 4 (ただし、Iは8〜12の間で定められた定数)
として回転トルクTを計算する接触率別トルク計算過程とでなる、
ことを特徴とする4点接触玉軸受のトルク計算方法。 - 4点接触玉軸受の内外輪間に作用する回転トルクT0を、コンピュータを用いて計算する方法であって、
転動体毎の回転トルクTを計算する個別トルク計算過程と、
全転動体の回転トルクTの和を求めてその和を前記内外輪間に作用する回転トルクT0とする総和計算過程とを含み、
前記個別トルク計算手段は、個々の転動体における、内輪もしくは外輪の2つの軌道面と転動体とのそれぞれの最大接触圧力P1 ,P2 、および軸受毎に定められた係数Cを入力して記憶領域に記憶する入力過程と、
上記2つの最大接触圧力P1 ,P2 を1つのパラメータで代表するための接触圧力和PS を、次式
PS =(P1 4 +P2 4 )1/4
によって求める接触圧力和計算過程と、
次式 Cf = min(P1 ,P2 )/ max(P1 ,P2 ) 0≦Cf ≦1
min(P1 ,P2 ):P1 ,P2 のうち小さい方の値、
max(P1 ,P2 ):P1 ,P2 のうち大きい方の値、
によって定められる大きい方の圧力に対する小さい方の圧力の比である4点接触率Cf を計算する4点接触率計算過程と、
0≦Cf <0.5の場合は、
T=(4点接触率Cf の二次関数)×C×PS 4
とし、
0.5≦Cf ≦1の場合は、
T=I×C×PS 4 (ただし、Iは8〜12の間で定められた定数)
として回転トルクTを計算する接触率別トルク計算過程とでなる、
ことを特徴とする4点接触玉軸受のトルク計算方法。 - 請求項1ないし請求項6のいずれか1項において、dn値=30000以下の低速度で使用される4点接触玉軸受に適用する4点接触玉軸受のトルク計算方法。
- 請求項1ないし請求項7のいずれか1項において、複列4点接触玉軸受に適用する4点接触玉軸受のトルク計算方法。
- 請求項1ないし請求項8のいずれか1項において、風車のブレードを角度調整可能に支持する軸受に適用する4点接触玉軸受のトルク計算方法。
- 請求項1ないし請求項9のいずれか1項において、風車のヨー用の軸受に適用する4点接触玉軸受のトルク計算方法。
- 請求項1ないし請求項10のいずれか1項において、医療機用の軸受に適用する4点接触玉軸受のトルク計算方法。
- 4点接触玉軸受の内外輪間に作用する回転トルクT0を計算する装置であって、
転動体毎の接触圧力または接触応力を計算する手段と、
転動体毎の回転トルクTを計算する個別トルク計算手段と、
全転動体の回転トルクTの和を求めてその和を前記内外輪間に作用する回転トルクT0とする総和計算手段とを含み、
前記個別トルク計算手段は、軸受に作用する荷重(Fr(Fx、Fy)、Fa、M(Mx、My))、お
よび軸受毎に定められた係数Cを入力して記憶領域に記憶する入力部と、
計算過程で求めた個々の転動体における、内輪もしくは外輪の2つの軌道面と転動体とのそれぞれの最大接触圧力P1 ,P2を1つのパラメータで代表するための接触圧力和PS
を、次式
PS =(P1 4 +P2 4 )1/4
によって求める接触圧力和計算部と、
次式
Cf = min(P1 ,P2 )/ max(P1 ,P2 ) 0≦Cf ≦1
min(P1 ,P2 ):P1 ,P2 のうち小さい方の値、
max(P1 ,P2 ):P1 ,P2 のうち大きい方の値、
によって定められる大きい方の圧力に対する小さい方の圧力の比である4点接触率Cf を計算する4点接触率計算部と、
0≦Cf <0.5の場合は、
T=(4点接触率Cf の二次関数)×C×PS 4
とし、
0.5≦Cf ≦1の場合は、
T=I×C×PS 4 (ただし、Iは8〜12の間で定められた定数)
として回転トルクTを計算する接触率別トルク計算部とでなる、
ことを特徴とする4点接触玉軸受のトルク計算装置。 - 4点接触玉軸受の内外輪間に作用する回転トルクT0を計算する装置であって、
転動体毎の回転トルクTを計算する個別トルク計算手段と、
全転動体の回転トルクTの和を求めてその和を前記内外輪間に作用する回転トルクT0とする総和計算手段とを含み、
前記個別トルク計算手段は、個々の転動体における、内輪もしくは外輪の2つの軌道面と転動体とのそれぞれの最大接触圧力P1 ,P2 、および軸受毎に定められた係数Cが入力されると記憶領域に記憶する入力部と、
上記2つの最大接触圧力P1 ,P2 を1つのパラメータで代表するための接触圧力和PS を、次式
PS =(P1 4 +P2 4 )1/4
によって求める接触圧力和計算部と、
次式 Cf = min(P1 ,P2 )/ max(P1 ,P2 ) 0≦Cf ≦1
min(P1 ,P2 ):P1 ,P2 のうち小さい方の値、
max(P1 ,P2 ):P1 ,P2 のうち大きい方の値、
によって定められる大きい方の圧力に対する小さい方の圧力の比である4点接触率Cf を計算する4点接触率計算部と、
0≦Cf <0.5の場合は、
T=(4点接触率Cf の二次関数)×C×PS 4
とし、
0.5≦Cf ≦1の場合は、
T=I×C×PS 4 (ただし、Iは8〜12の間で定められた定数)
として回転トルクTを計算する接触率別トルク計算部とでなる、
ことを特徴とする4点接触玉軸受のトルク計算装置。 - 請求項13において、前記接触率別トルク計算部における、0≦Cf <0.5の場合の回転トルクTの計算を、次式
T=(1+36Cf 2 )CPS 4
に従って行う4点接触玉軸受のトルク計算装置。 - コンピュータで実行可能であり、4点接触玉軸受の内外輪間に作用する回転トルクT0を計算するプログラムであって、
転動体毎の接触圧力を計算する手順と、
転動体毎の回転トルクTを計算する個別トルク計算手順と、
全転動体の回転トルクTの和を求めてその和を前記内外輪間に作用する回転トルクT0とする総和計算手順とを含み、
前記個別トルク計算手段は、軸受に作用する荷重(Fr(Fx、Fy)、Fa、M(Mx、My))、お
よび軸受毎に定められた係数Cを入力して記憶領域に記憶する入力手順と、
計算過程で求めた個々の転動体における、内輪もしくは外輪の2つの軌道面と転動体とのそれぞれの最大接触圧力P1 ,P2を1つのパラメータで代表するための接触圧力和PS
を、次式
PS =(P1 4 +P2 4 )1/4
によって求める接触圧力和計算手順と、
次式 Cf = min(P1 ,P2 )/ max(P1 ,P2 ) 0≦Cf ≦1
min(P1 ,P2 ):P1 ,P2 のうち小さい方の値、
max(P1 ,P2 ):P1 ,P2 のうち大きい方の値、
によって定められる大きい方の圧力に対する小さい方の圧力の比である4点接触率Cf を計算する4点接触率計算手順と、
0≦Cf <0.5の場合は、
T=(4点接触率Cf の二次関数)×C×PS 4
とし、
0.5≦Cf ≦1の場合は、
T=I×C×PS 4 (ただし、Iは8〜12の間で定められた定数)
として回転トルクTを計算する接触率別トルク計算手順とでなる、
ことを特徴とする4点接触玉軸受のトルク計算プログラム。 - コンピュータで実行可能であり、4点接触玉軸受の内外輪間に作用する回転トルクT0を計算するプログラムであって、
転動体毎の回転トルクTを計算する個別トルク計算手順と、
全転動体の回転トルクTの和を求めてその和を前記内外輪間に作用する回転トルクT0とする総和計算手順とを含み、
前記個別トルク計算手順は、個々の転動体における、内輪もしくは外輪の2つの軌道面と転動体とのそれぞれの最大接触圧力P1 ,P2 、および軸受毎に定められた係数Cが入力されると記憶領域に記憶する入力手順と、
上記2つの最大接触圧力P1 ,P2 を1つのパラメータで代表するための接触圧力和PS を、次式
PS =(P1 4 +P2 4 )1/4
によって求める接触圧力和計算手順と、
次式 Cf = min(P1 ,P2 )/ max(P1 ,P2 ) 0≦Cf ≦1
min(P1 ,P2 ):P1 ,P2 のうち小さい方の値、
max(P1 ,P2 ):P1 ,P2 のうち大きい方の値、
によって定められる大きい方の圧力に対する小さい方の圧力の比である4点接触率Cf を計算する4点接触率計算手順と、
0≦Cf <0.5の場合は、
T=(4点接触率Cf の二次関数)×C×PS 4
とし、
0.5≦Cf ≦1の場合は、
T=I×C×PS 4 (ただし、Iは8〜12の間で定められた定数)
として回転トルクTを計算する接触率別トルク計算手順とでなる、
ことを特徴とする4点接触玉軸受のトルク計算プログラム。 - 請求項15または16において、前記接触率別トルク計算手順における、0≦Cf <0.5の場合の回転トルクTの計算を、次式
T=(1+36Cf 2 )CPS 4
に従って行う4点接触玉軸受のトルク計算プログラム。
Priority Applications (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010010259A JP5506420B2 (ja) | 2010-01-20 | 2010-01-20 | 4点接触玉軸受のトルク計算方法・計算装置・および計算プログラム |
| EP11734584.3A EP2527671A4 (en) | 2010-01-20 | 2011-01-14 | TORQUE COMPENSATION PROCEDURE FOR A FOUR-POINT CONTACT BALL BEARING AND CALCULATION DEVICE AND CALCULATION PROGRAM THEREFOR |
| CN201180006629.1A CN102725545B (zh) | 2010-01-20 | 2011-01-14 | 四点接触滚珠轴承的力矩计算方法、计算装置与实施方法 |
| IN6585DEN2012 IN2012DN06585A (ja) | 2010-01-20 | 2011-01-14 | |
| PCT/JP2011/050525 WO2011089977A1 (ja) | 2010-01-20 | 2011-01-14 | 4点接触玉軸受のトルク計算方法・計算装置・および計算プログラム |
| KR1020127018168A KR101858037B1 (ko) | 2010-01-20 | 2011-01-14 | 4점 접촉 볼베어링의 토크 계산 방법, 계산 장치 및 계산 프로그램 |
| US13/552,822 US9002662B2 (en) | 2010-01-20 | 2012-07-19 | Torque calculation method, calculation device, and calculation program for four-point contact ball bearing |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010010259A JP5506420B2 (ja) | 2010-01-20 | 2010-01-20 | 4点接触玉軸受のトルク計算方法・計算装置・および計算プログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011149471A JP2011149471A (ja) | 2011-08-04 |
| JP5506420B2 true JP5506420B2 (ja) | 2014-05-28 |
Family
ID=44306781
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010010259A Expired - Fee Related JP5506420B2 (ja) | 2010-01-20 | 2010-01-20 | 4点接触玉軸受のトルク計算方法・計算装置・および計算プログラム |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US9002662B2 (ja) |
| EP (1) | EP2527671A4 (ja) |
| JP (1) | JP5506420B2 (ja) |
| KR (1) | KR101858037B1 (ja) |
| CN (1) | CN102725545B (ja) |
| IN (1) | IN2012DN06585A (ja) |
| WO (1) | WO2011089977A1 (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103174741B (zh) * | 2013-03-20 | 2015-06-03 | 天津职业技术师范大学 | 一种四点接触球轴承原始接触角的设计方法 |
| JP6238796B2 (ja) * | 2014-03-07 | 2017-11-29 | Ntn株式会社 | 計算方法、計算装置および計算システム |
| JP6297373B2 (ja) * | 2014-03-22 | 2018-03-20 | Ntn株式会社 | 薄肉大型軸受の試験装置 |
| JP6290342B1 (ja) * | 2016-09-07 | 2018-03-07 | Ntn株式会社 | 左右輪駆動装置の制御装置 |
| JP2018204681A (ja) | 2017-06-02 | 2018-12-27 | 株式会社不二越 | 複列4点接触玉軸受 |
| CN107590356B (zh) * | 2017-10-31 | 2020-04-28 | 国电联合动力技术有限公司 | 一种风力发电机组主轴轴承自动选型方法及存储设备 |
| JP6806827B2 (ja) * | 2019-03-04 | 2021-01-06 | Ntn株式会社 | 車輪用軸受装置の予圧検査方法及び組立方法 |
| DE102019115140A1 (de) * | 2019-06-05 | 2020-12-10 | Schaeffler Technologies AG & Co. KG | Wälzlager |
| CN110823323B (zh) * | 2019-09-17 | 2021-01-19 | 中国航发沈阳发动机研究所 | 一种涡轮转子叶片水流量测量值的修正方法 |
| CN111209686B (zh) * | 2020-01-16 | 2024-04-19 | 重庆大学 | 基于复合形法的滚动轴承多体润滑性能求解方法 |
| CN112283242A (zh) * | 2020-09-30 | 2021-01-29 | 人本股份有限公司 | 轮毂单元轴承 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3244258A1 (de) * | 1982-11-30 | 1984-05-30 | Fa. Carl Zeiss, 7920 Heidenheim | Waelzlager fuer radialbewegungen |
| JP3405235B2 (ja) * | 1998-11-24 | 2003-05-12 | 日本精工株式会社 | ラジアル転がり軸受用回転精度及び動トルク測定装置 |
| JP2000162092A (ja) * | 1998-11-27 | 2000-06-16 | Nsk Ltd | 転がり軸受用動トルク測定装置 |
| JP2003172341A (ja) * | 2001-09-28 | 2003-06-20 | Nsk Ltd | ボールねじ支持用多点接触玉軸受 |
| DK1745221T3 (da) * | 2004-05-07 | 2009-02-16 | Timken Co | Positionerende lejeaggregat til vindmöllekasseaksel |
| JP2006177774A (ja) * | 2004-12-22 | 2006-07-06 | Nsk Ltd | 転がり軸受の動トルク測定方法と測定装置及び転がり軸受の異常検知方法及び異常検知装置 |
| JP2006316915A (ja) * | 2005-05-13 | 2006-11-24 | Nsk Ltd | 軸受装置 |
| CN101373495B (zh) | 2007-08-24 | 2010-09-29 | 西门子公司 | 使用寿命终点判定及当前历史使用寿命估计的方法和系统 |
| CN101978253B (zh) * | 2008-03-19 | 2013-04-17 | 平田机工株式会社 | 工件检查搬运装置 |
| JP5018667B2 (ja) * | 2008-06-20 | 2012-09-05 | 株式会社ジェイテクト | 回転トルク検出装置 |
-
2010
- 2010-01-20 JP JP2010010259A patent/JP5506420B2/ja not_active Expired - Fee Related
-
2011
- 2011-01-14 EP EP11734584.3A patent/EP2527671A4/en not_active Withdrawn
- 2011-01-14 KR KR1020127018168A patent/KR101858037B1/ko active IP Right Grant
- 2011-01-14 WO PCT/JP2011/050525 patent/WO2011089977A1/ja active Application Filing
- 2011-01-14 CN CN201180006629.1A patent/CN102725545B/zh not_active Expired - Fee Related
- 2011-01-14 IN IN6585DEN2012 patent/IN2012DN06585A/en unknown
-
2012
- 2012-07-19 US US13/552,822 patent/US9002662B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US20120283965A1 (en) | 2012-11-08 |
| EP2527671A1 (en) | 2012-11-28 |
| KR20120113227A (ko) | 2012-10-12 |
| WO2011089977A1 (ja) | 2011-07-28 |
| KR101858037B1 (ko) | 2018-05-15 |
| CN102725545B (zh) | 2015-03-25 |
| IN2012DN06585A (ja) | 2015-10-23 |
| US9002662B2 (en) | 2015-04-07 |
| JP2011149471A (ja) | 2011-08-04 |
| EP2527671A4 (en) | 2016-06-22 |
| CN102725545A (zh) | 2012-10-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5506420B2 (ja) | 4点接触玉軸受のトルク計算方法・計算装置・および計算プログラム | |
| Yang et al. | Simulation and experimental analysis of rolling element bearing fault in rotor-bearing-casing system | |
| Han et al. | Nonlinear dynamic model for skidding behavior of angular contact ball bearings | |
| JP6650030B2 (ja) | 転がり軸受疲労状態予測装置及び転がり軸受疲労状態予測方法 | |
| CN110967185B (zh) | 转子轴承径向载荷测量方法、装置及航空发动机 | |
| Lacroix et al. | Four-point contact ball bearing model with deformable rings | |
| Houpert | An enhanced study of the load–displacement relationships for rolling element bearings | |
| Medina et al. | Regimes of contact in spline couplings | |
| LaCava et al. | Three‐dimensional bearing load share behaviour in the planetary stage of a wind turbine gearbox | |
| Halminen et al. | A touchdown bearing with surface waviness: Friction loss analysis | |
| Xu et al. | Analysis of axial and overturning ultimate load-bearing capacities of deep groove ball bearings under combined loads and arbitrary rotation speed | |
| Xu et al. | Contact characteristics analysis of deep groove ball bearings under combined angular misalignments and external loads | |
| Liu et al. | An analysis of the load distribution characteristics of a cylindrical roller bearing including the component deformation and waviness | |
| Cheng et al. | Research on the effect of structural and material parameters on vibrations based on quasi-static model of bearings | |
| JP2019190943A (ja) | 転がり軸受疲労状態予測システム | |
| Lacroix et al. | Experimental study of four-point contact ball bearing with deformable rings | |
| Lin et al. | Dynamic characteristics of motorized spindle with tandem duplex angular contact ball bearings | |
| Thibault et al. | Dynamic model of a deep grooves ball bearing dedicated to the study of instantaneous angular speed of rotating assemblies | |
| Niebsch et al. | Simultaneous estimation of mass and aerodynamic rotor imbalances for wind turbines | |
| Rimpel et al. | A Rotordynamic, Thermal, and Thrust Load Performance Gas Bearing Test Rig and Test Results for Tilting Pad Journal Bearings and Spiral Groove Thrust Bearings | |
| Howard et al. | Advancements toward oil-free rotorcraft propulsion | |
| Skyba et al. | Creation of calculation 3D model of slewing bearing | |
| Wang et al. | A dynamic thermal-mechanical model of the spindle-bearing system | |
| Chen et al. | Effects of Wear on Lubrication Performance and Vibration Signatures of Rotor System Supported by Hydrodynamic Bearings | |
| Vannini et al. | Experiments on a Large Flexure Pivot Journal Bearing: Summary of Test Results and Comparison With Predictions |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20121226 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130924 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140304 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140318 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5506420 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |