JP5489809B2 - 画像処理装置および画像処理装置の制御方法 - Google Patents
画像処理装置および画像処理装置の制御方法 Download PDFInfo
- Publication number
- JP5489809B2 JP5489809B2 JP2010069926A JP2010069926A JP5489809B2 JP 5489809 B2 JP5489809 B2 JP 5489809B2 JP 2010069926 A JP2010069926 A JP 2010069926A JP 2010069926 A JP2010069926 A JP 2010069926A JP 5489809 B2 JP5489809 B2 JP 5489809B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- interpolation
- shift amount
- line
- processing apparatus
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images














Landscapes
- Testing, Inspecting, Measuring Of Stereoscopic Televisions And Televisions (AREA)
Description
上述した走査線補間技術はインタレース方式の右目用映像と左目用映像のそれぞれに対して適用可能であるが、それらの映像間の相関性を有効に利用することはできない。そのため、上述した走査線補間技術では高画質なプログレッシブ映像を生成することができない(画像のライン間を精度良く補間することができない)。
また、右目用映像と左目用映像とが互いに相補的な関係にあるとは限らない。右目用映像と左目用映像とが互いに相補的な関係にあったとしても、右目用映像の補間ラインに相当する左目用映像のラインの映像が必ずしも補間ラインの位置に対応する映像とは限らない。そのため、特許文献1の技術では、高画質なプログレッシブ映像を生成できないことや、プログレッシブ映像自体を生成できないことがある。
量の分だけずれた位置に存在するラインを用いて補間ラインを生成する2画像間補間処理により補間画素を生成し、前記ずれ量が誤りであると判定された場合、フィールド内補間処理により補間画素を生成することを特徴とする。
(構成)
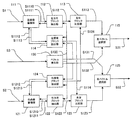
図1に本実施例に係る立体映像表示システムの構成を示す。
再生機1は光ディスクや磁気ディスクなどに記録された映像を再生する再生装置等を備える。再生機1は、同一対象を異なる視点から撮影した2つの映像(左入力映像(左目用の映像)と右入力映像(右目用の映像))から成る立体映像を再生し、左入力画像(信号)S1と右入力画像(信号)S2を出力する。左入力画像S1(第1画像)と右入力画像S2(第2画像)は、それぞれ、インタレース映像である左入力映像、右入力映像の1つのフィールドである。
IP変換部2は本実施例に係る画像処理装置である。IP変換部2は、左入力映像と右入力映像をそれぞれプログレッシブ映像に変換する。具体的には、左入力画像S1のライン間に補間ラインを生成することにより、左入力画像S1を左出力画像S15に変換する。右入力画像S2も同様に右出力画像S25に変換する。
立体表示機3は、左出力画像S15と右出力画像S25を取得して、立体映像を表示する。
左動き検出部11は、左入力画像S1の動きを検出する(動き検出手段)。具体的には、左入力画像S1(左注目フィールド)の前後のフィールドを用いて左入力画像S1にお
ける補間画素(補間ラインを構成する画素)の生成位置毎の動きの有無を検出する。そして、検出結果として左動き検出信号S11を出力する。
左フィールド内補間画像生成部12は、左入力画像S1に対し、フィールド内補間処理を実行する。具体的には、左入力画像S1における補間ラインの生成位置の上下のラインから補間ラインを生成し、生成した補間ラインで構成される左フィールド内補間画像S12を出力する。
左フィールド間補間画像生成部13は、左入力画像S1に対し、フィールド間補間処理を実行する。具体的には、左入力画像S1の前後のフィールドから左入力画像S1の補間ラインを生成し、生成した補間ラインで構成される左フィールド間補間画像S13を出力する。
左右間補間画像生成部14は、後述する左視差S41と上下オフセットS43を参照して、左入力画像S1と右入力画像S2から左入力画像S1の補間ラインを生成し、生成した補間ラインで構成される左右間補間画像S14を出力する。
左画素選択部15は、画素位置毎に、左動き検出信号S11と左視差S41に応じて、左入力画像S1、左フィールド内補間画像S12、左フィールド間補間画像S13、左右間補間画像S14のいずれかの画素を選択する。それにより、左出力画像S15を生成し出力する。
右フィールド間補間画像生成部23は、右入力画像S2の前後のフィールドから右入力画像S2の補間ラインを生成し、生成した補間ラインで構成される右フィールド間補間画像S23を出力する。
右左間補間画像生成部24は、後述する右視差S42と上下オフセットS43を参照して、左入力画像S1と右入力画像S2から右入力画像S2の補間ラインを生成し、生成した補間ラインで構成される右左間補間画像S24を出力する。
右画素選択部25は、右動き検出信号S21と右視差S42に応じて、右入力画像S2、右フィールド内補間画像S22、右フィールド間補間画像S23、右左間補間画像S24のいずれかの画素を選択して右出力画像S25を出力する。
左右比較部30は左入力画像S1と右入力画像S2を比較し、比較結果として左右ベクトルS31と右左ベクトルS32を出力する。本実施例では、左右比較部30は、左入力画像S1を複数の分割領域(ブロック)に分割し、分割領域毎に左右ベクトルS31を検出する。また、左入力画像S1と同様に右入力画像S2を複数の分割領域に分割し、分割領域毎に右左ベクトルS32を検出する。
オフセット検出部40は左右ベクトルS31と右左ベクトルS32を解析して左右画像間の垂直方向のずれ量を算出し、上下オフセットS43、左視差S41、右視差S42を出力する。
次に、左動き検出部11における動き検出方法の具体例を説明する。動き検出方法の概
念図を図3に示す。図3において、n1,n2,・・・,nXは左入力画像S1(左注目フィールド)の画素である。a1,a2,・・・,aXは左入力画像S1の1つ後のフィールドの画素である。b1,b2,・・・,bXは左入力画像S1の1つ前のフィールドの画素である。m1は、画素a1,b1の位置と等しい左入力画像S1内の位置(補間画素の生成位置)に対する動き情報である。動き情報m1は以下のように算出される(eは所定の閾値)。
|a1−b1|≦eであれば、m1=0(動きなし)
|a1−b1|>eであれば、m1=1(動きあり)
画素a2,・・・aX(画素b2,・・・,bX)の位置と等しい左注目フィールド内の各位置に対する動き情報m2,・・・,mXも同様に算出される。そして、それらの算出結果が左動き検出信号S11として出力される。
右動き検出部21における動き検出方法も同様である。
次に、左フィールド内補間画像生成部12における左フィールド内補間画像の生成方法の具体例を説明する。生成方法の概念図を図4に示す。c1,c2,・・・,cXは補間により生成すべき画素(補間画素)である。左フィールド内補間画像生成部12は、上下に隣接する画素の平均値を補間画素の値とする。ただし、左補間画素の生成位置が最上位ラインもしくは最下位ライン上の位置のように上側もしくは下側に画素が存在しない位置である場合には、存在する一方の画素の値をそのまま補間画素の値とする。すなわち、図4の場合には、
c1=n1
cK=(n1+nK)/2
となる。全ての補間画素の値を算出することにより、それら補間画素から成る左フィールド内補間画像S12が生成される。
右フィールド内補間画像生成部22における右フィールド内補間画像の生成方法も同様である。
次に、左フィールド間補間画像生成部13における左フィールド間補間画像の生成方法の具体例を説明する。生成方法の概念図を図5に示す。d1,d2,・・・,dXは補間画素である。左フィールド間補間画像生成部13は、補間画素の値を以下のように算出する。
d1=(a1+b1)/2
補間画素d2,・・・,dXの値も同様に算出することにより、それら補間画素から成る左フィールド間補間画像S13が生成される。
右フィールド間補間画像生成部23における右フィールド間補間画像の生成方法も同様である。
次に、左右比較部30における左入力画像と右入力画像の比較方法の具体例を説明する。左右比較部30の構成図を図6に示す。
左画像蓄積部111は、左入力画像S1を不図示のフレームメモリに蓄積する。また、左注目ブロック読出しアドレスS1110に応じて左注目ブロック画素S1111をフレームメモリから読み出して出力する。左探索ブロック読出しアドレスS1112に応じて左探索ブロック画素S1113をフレームメモリから読み出して出力する。
左注目ブロック抽出部112は、注目ブロック領域S130に基づいて左注目ブロックを順に選択し、選択したブロックの左注目ブロック読出しアドレスS1110を生成する。そして、左画像蓄積部111から左注目ブロック画素S1111を読み出し、左注目ブロックS112を出力する。
左右ブロック比較部113は、左注目ブロックS112と右探索ブロックS124を比較して左右ブロック一致度S113を出力する。一致度の算出方法の詳細は後述する。
左探索ブロック抽出部114は、左探索ベクトルS131に応じて左探索ブロック読出しアドレスS1112を生成する。そして、左画像蓄積部111から左探索ブロック画素S1113を読み出し、左探索ブロックS114を出力する。
左ベクトル選択部115は、各右探索ベクトルS132の左右ブロック一致度S113を検査し、最も一致度の高かった右探索ベクトルを左右ベクトルS31として出力する。
右注目ブロック抽出部122は、注目ブロック領域S130に基づいて右注目ブロックを順に選択し、選択したブロックの右注目ブロック読出しアドレスS1210を生成する。そして、右画像蓄積部121から右注目ブロック画素S1211を読み出し、右注目ブロックS122を出力する。
右左ブロック比較部123は、右注目ブロックS122と左探索ブロックS114を比較して右左ブロック一致度S123を出力する。一致度の算出方法の詳細は後述する。
右探索ブロック抽出部124は、右探索ベクトルS132に応じて右探索ブロック読出しアドレスS1212を生成する。そして、右画像蓄積部121から右探索ブロック画素S1213を読み出し、右探索ブロックS124を出力する。
右ベクトル選択部125は、各左探索ベクトルS131の右左ブロック一致度S123を検査し、最も一致度の高かった左探索ベクトルを右左ベクトルS32として出力する。
ステップP301では画像の蓄積が行われる。左入力画像S1は左画像蓄積部111、右入力画像S2は右画像蓄積部121によりフレームメモリへ蓄積される。なお、フレームメモリは左画像蓄積部111と右画像蓄積部121とで個別に設けられていてもよいし、左画像蓄積部111と右画像蓄積部121とで共通のフレームメモリであってもよい。
、全画像領域81に右端に達したら、次に下の段、すなわち対角座標(0,8),(7,15)の領
域が選択される。以下同様にして順に全画像領域81の全ての領域が選択される。
された画素を再構成して左注目ブロックS112(左入力画像S1のうち、選択された注目ブロック領域の画像)を生成する。
右注目ブロック抽出部122においても同様の動作が行われる。
ステップP304では探索ベクトルの発生を行う。探索ベクトルと探索ブロックの概念図を図9に示す。探索領域83は左探索ベクトルS131、右探索ベクトルS132をそれぞれ独立に設定する。
立体映像の左右視差(左入力画像S1と右入力画像S2の水平方向の視差)は、観察者の左右の目が寄る方向(画面より手前に飛び出す方向)に大きくすることは可能であるが、その逆方向の視差を大きくすることはできない。それは、人間の目が一般的に並行よりも離れた視線を作ることができないことに起因する。この視差の限界を視差限界という。
視差限界の概念図を図10に示す。図10の例において、観察者の左眼95aは、立体映像装置96の不図示の仕組みにより、左眼用の画像において手前に飛び出すオブジェクト91aと左眼用の画面において奥に引っ込むオブジェクト93aを選択的に観察する。観察者の右目95bも同様に、右眼用の画像において手前に飛び出すオブジェクト91bと右眼用の画面において奥に引っ込むオブジェクト93bを選択的に観察する。観察者は画面より手前に飛び出すオブジェクト91a、91b間に存在する左右視差92によって、画面より手前に飛び出すオブジェクトの虚像91cを認識する。同様に、画面よりも奥に引っ込むオブジェクト93a、93b間に存在する左右視差94によって、画面よりも奥に引っ込むオブジェクトの虚像93cを認識する。
探索ベクトルS131(-99.5,-5)と右探索ベクトルS132(-599.5,-5)が発生される。
以下同様に、{左探索ベクトル,右探索ベクトル}={(-99,-5),(-599,-5)},{(-98.5,-5),(-598.5,-5)},・・・と順に発生される。そして、探索領域の右端{(600,-5),(100,-5)}に達したら、次は下に半画素ずらして{(-100,-4.5),(-600,-4.5)},{(-99.5,-4.5),(-599.5,-4.5)},・・・,{(600,5),(100,5)}と順に発生される。このよう
に、探索領域全てについて左探索ベクトルS131と右探索ベクトルS132を発生する。
あるとき、左探索ブロック領域の対角座標(lx1,iy1),(lx2,ly2)は、
lx1=x1+lvx
ly1=y1+lvy
lx2=x2+lvx
ly2=y2+lvy
と算出される。
右探索ブロック抽出部124においても同様に右探索ブロック領域が算出される。
q(0,0)={p(10,0)+p(11,0)+p(10,1)+p(11,1)}/4
q(0,1)={p(10,1)+p(11,1)+p(10,2)+p(11,2)}/4
・・・(以下同様)・・・
q(7,7)={p(17,7)+p(18,7)+p(17,8)+p(18,8)}/4
と算出される。
右探索ブロック抽出部においても同様の動作が行われる。
×8の画素値をt(0,0)〜t(7,7)、右探索ブロックS124を構成する8×8の画素値をu(0,0)〜u(7,7)とすると、左右ブロック一致度S113(SAD)は、
SAD=Σ|t(x,y)−u(x,y)|
と算出される。SADの値は小さいほど、両ブロックがよく一致していることを示す。
右左ブロック比較部123においても同様にして右左ブロック一致度S123が算出される。
右ベクトル選択部においても同様に右左ブロック一致度S123が最小となる左探索ベクトルS131が選択される。
ステップP310ではブロック一致度が最小となるベクトルの出力を行う。左ベクトル選択部115は一時保持したベクトルを左右ベクトルS31として出力する。右ベクトル選択部125も同様に一時保持したベクトルを右左ベクトルS32として出力する。
ステップP311では1画面分の終了判定を行う。全ての注目ブロックが選択されて1画面分の左右比較がすべて終了したら、左右比較部30における左右比較処理を終了する。まだ終了していなければステップP302へ戻り、引き続き左右比較処理を行う。
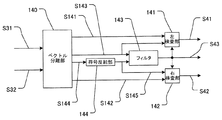
次に、オフセット検出部40における視差の分離とオフセット検出方法の詳細を説明する。オフセット検出部40の構成図を図11に示す。
ベクトル分離部140は、左右ベクトルS31を成分分離して、水平方向成分を左原視差S141、垂直方向成分を左上下差S143(垂直方向のずれ量)として出力する。また、右左ベクトルS32を同様に分離して、水平方向成分を右原視差S142、垂直方向成分を右上下差S144(垂直方向のずれ量)として出力する。
符号反転部144は、右上下差S144の符号を反転して反転右上下差S145を出力する。
そこで、左検査部141は、ブロック毎に上下オフセットS43と左上下差S143を比較し、一致すれば左原視差S141を左視差S41として出力する。一致しなければ、左上下差(左右ベクトル)は誤りであると判断し、左視差S41として「ベクトル無し」を出力する。なお、上下オフセットS43と左上下差S143は完全に一致していなくてもよい。上下オフセットS43と左上下差S143の差が所定の値以下の場合に、それらが一致しているとみなしてもよい。
右検査部142は上下オフセットS43と反転右上下差S145を比較し、一致すれば右原視差S142を右視差S42に出力する。一致しなければ、右上下差(右左ベクトル)は誤りであると判断し、右視差S42として「ベクトル無し」を出力する。
次に、左右間補間画像生成部14における補間画像生成方法(2画像間補間処理)の詳細について説明する。左右間補間画像生成部14は上下オフセットS43(左上下差S143)の値によって3種類の補間方法を使い分ける。なお、右左間補間画像生成部24における2画像間補間処理も同様の考え方を適用すればよいため、説明は省略する。但し、右上下差S144ではなく上下オフセットS43が右左間補間画像生成部24に入力される場合、右左間補間画像生成部24は上下オフセットS43を符号を反転して用いる。
上下オフセットS43が奇数の場合には、右入力画像S2において、左入力画像S1の補間ラインの生成位置から上下オフセットS43の分だけずれた位置にラインが存在する。そのような場合には、右入力画像S2における該ラインを用いて補間ラインを生成する。具体的には、左視差と上下オフセットが指し示した丸印の位置に、右入力画像S2の画素bが存在するため、補間画素Xの値として画素bの値を用いる。
上下オフセットS43が偶数の場合には、右入力画像S2において、左入力画像S1の補間ラインの生成位置から上下オフセットS43の分だけずれた位置にラインが存在しない。そのような場合には、左入力画像S1における該補間ラインの生成位置の上下のラインを用いて補間ラインを生成する。具体的には、左視差と上下オフセットが指し示した丸印の位置に右入力画像S2の画素が存在しないため、補間画素Xの値として、
X=(w+y)/2
で算出される値を用いる。
このような場合には、補間ラインの生成位置に対し、左入力画像S1における該生成位置の上下のライン、及び、右入力画像S2における該生成位置から上下オフセットの分だけずれた位置の上下のラインを用いて、補間ラインを生成する。具体的には、上下オフセットが整数ライン分でない場合には、左視差と上下オフセットが指し示した位置(1画素分の領域)の一部に右入力画像S2の画素bが存在する。そのため、補間画素Xの値として、左入力画像S1の線形補間から求めた値と右入力画像S2の線形補間から求めた値の平均値を用いる。例えば、左視差と上下オフセットが指し示した領域の半分に画素bが重なっている場合(視差とオフセットが指し示した位置から画素bまでの距離と画素cまでの距離が1:3である場合)には、補間画素Xの値として、
X={(w+y)/2+(3b/4+c/4)}/2
で算出される値を用いる。
次に左画素選択部15における画素選択方法(ライン補間処理)の詳細について説明する。
左入力画像S1に元から含まれていて補間の必要がない画素はそのまま選択される。
補間が必要な画素の選択方法は以下の通りである。
左動き検出信号S11の判定が“動きなし”であった位置に対しては、補間画素として左フィールド間補間画像S13の画素が選択される。
左動き検出信号S11の判定が“動きあり”で、かつ左視差S41が存在している位置に対しては、補間画素として左右間補間画像S14の画素が選択される。
左動き検出信号S11の判定が“動きあり”で、かつ左視差S41が存在しない位置に対しては、補間画素として左フィールド内補間画像S12の画素が選択される。
即ち、補間ラインを生成する際に、画像の動きのない領域内にはフィールド間補間処理により補間画素を生成し、画像の動きのある領域内には2画像間補間処理により補間画素を生成する。更に、画像の動きのある領域内であって、且つ、算出されたずれ量(左上下差)が誤りであると判断された分割領域内(ブロック内)には、フィールド内補間処理により補間画素を生成する。
それにより、左出力画像S15の各画素が選択されて出力される。
なお、ライン補間に伴う画素クロックの変動や各補間処理に伴う処理遅れ時間については、不図示のラインメモリまたはフレームメモリを用いて適宜調整を行う。
なお、右画素選択部25における画素選択方法も同様である。
また、本実施例の構成によれば、立体映像を構成する2つの映像をそれぞれ高画質なプ
ログレッシブ映像に変換できるため、高画質なプログレッシブ方式の立体映像を得ることができる。
また、本実施例によれば、上記対となる画像から補間ラインの生成位置に対応するライン(高画質化のためのライン)が見つからなかった場合には、従来のライン補間処理と同等の動作が行われる。そのため、従来のライン補間処理と比べ、常に同等以上の画質を得ることが可能である。
また、本実施例では、ブロック毎に、そのブロックの上下オフセットを用いて補間ラインを生成することにより、画面内に一様でないオフセットが存在する場合にも対応することができる。例えば、ブロック単位で補間ラインを生成することにより、第1画像に対し第2画像が傾いた画像である場合や、第1画像に対し第2画像が拡大/縮小された画像である場合などにも対応することが可能となる。
なお、対象とする画像は立体映像を構成する映像のフィールドに限らない。例えば、映像ではなく1枚の画像であってもよい。対を成す2つ以上の画像が相関性のある画像(同一対象を異なる視点から撮影した画像)であればよい。
なお、本実施例では、左入力画像S1と右入力画像S2(第1画像と第2画像)の両方のライン間を補間する構成としたが、一方の画像のライン間を補間する構成であってもよい。その場合には、補間の対象となる画像が第1画像となる。
なお、本実施例では、第1映像と第2映像の両方がインタレース映像である場合について説明したが、第2映像はプログレッシブ映像であってもよい。
なお、本実施例では、補間画素の生成位置毎に画像の動きを検出する構成としたが、動き検出の方法はこれに限らない。例えば、ブロックマッチング法などを用いて、所定の大きさの領域毎に動きの有無を検出してもよい。
なお、左右ベクトルや右左ベクトルが、第2画像の水平方向に隣接する画素間を指し示す場合には、該水平方向に隣接する画素を用いて補間画素を生成してもよい。
なお、各補間処理は、上述した方法に限らない。例えば、図5において、左フィールド間補間画像生成部13は、画素a1や画素b1の値を補間画素d1の値としてもよい。
なお、本実施例では、分割領域毎に垂直方向のずれを算出する構成としたが、全画像領域に対して1つのずれ量を算出する構成であってもよい。そのような構成であっても、従来に比べより高精度なライン間補間処理を実現できる。
なお、本実施例では、算出された垂直方向のずれが誤り否かを判断する構成としたが、そのような判断を行わずとも、従来に比べより高精度なライン間補間処理を実現できる。また、そのような判断に用いる代表値の決定方法は、上述した方法に限らない。例えば、代表値を決定する際に、第2画像に対して算出されたずれ量は含めなくてもよい。
実施例1では再生機1から左右独立した映像ストリーム(左入力映像と右入力映像)が出力される構成であった。本発明は、放送等で用いられているサイドバイサイド方式の立体映像(1つの映像ストリームの左右に左入力映像と右入力映像を左右に並べた立体映像)に対しても実施することができる。
実施例2に係る立体映像表示システムの構成図を図13に示す。
放送受信機4はサイドバイサイド方式による放送を受信してサイドバイサイド立体映像S4を出力する。
左ラインバッファ5は、サイドバイサイド立体映像S4を入力して、ラインの左半分の画素をメモリに書き込む。読出し側ではメモリに書かれた画素を読み出して左入力画像S1を出力する。
右ラインバッファ6は、サイドバイサイド立体映像S4を入力して、ラインの右半分の
画素をメモリに書き込む。読出し側ではメモリに書かれた画素を読み出して右入力画像S2を出力する。
IP変換部2は実施例1と同様のライン補間処理を行う。
また、以上の動作タイミングの制御は不図示の制御部が行う。この動作タイミングの概念図を図14に示す。図中、1Hは1ラインを走査する期間を表し、Filx1(x1は1以上
の整数)はx番目のフィールドを表す。oddはそのフィールドが奇数番目のラインのみを有すること(oddフィールドであること)を表し、evenはそのフィールドが偶数番目のライ
ンのみを有すること(evenフィールドであること)を表す。Linex2(x2は1以上の整数)はx2番目のラインを表し、Left,Rightはそのラインがそれぞれ左入力画像、右入力画像
のラインであることを表す。
このようにして、サイドバイサイド方式立体映像についても本発明を実施することが可能である。
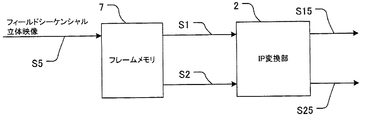
本発明は、フィールドシーケンシャル方式の立体映像に対しても実施することができる。フィールドシーケンシャル方式は、左入力映像のフィールドと右入力映像のフィールとを交互に繰り返す方式である。
実施例3に係る立体映像表示システムの構成図を図15に示す。
不図示の映像入力部から入力されたフィールドシーケンシャル立体映像S5はフレームメモリ7に蓄えられる。不図示の制御手段は入力された映像信号のフィールドを並び替えて左入力画像S1および右入力画像S2を出力する。このときの動作タイミングの概念図を図16(A)に示す。
IP変換部2は実施例1と同様のライン補間処理を行う。
入力画像S2のフィールドとしては常にevenフィールドの状態で入力される。
この場合は、実施例1に説明した状況と比較してオフセットが1ずれていると考えて動作を修正する。具体的には、左右間補間画像生成部14は、上下オフセットS43の値が整数ライン分でかつ偶数であった場合に、右入力画像のラインを用いた補間を行う。また、上下オフセットS43の値が整数でかつ奇数であった場合には、左入力画像のラインを用いて補間ラインを生成する。右左間補間画像生成部24の動作も同様に修正する。
また、この場合には、フィールド間補間処理を行うことができないため、左画素選択部15は、“動きなし”の位置に対して、左右間補間画像S14の画素を選択する。右画素選択部25の動作も同様に修正する。
このようにして、フィールドシーケンシャル方式の立体映像についても本発明を実施することが可能である。
以上説明した実施例では入力された立体映像に自然に存在する上下オフセットを検出するものとしたが、映像コンテンツの上下オフセットを予め厳密に調整しておくことでさらに高精度な走査線補間を行うことも可能である。
実施例4における映像コンテンツ作成システムの概念図を図17に示す。図中、Lx3(x3は1以上の整数)はプログレッシブ方式の左入力画像のラインを表し、Rx4(x4は1以上の整数)はプログレッシブ方式の右入力画像のラインを表す。ODDは、プログレッシブ方
式の左入力画像、右入力画像からインタレース化により作成された奇数番目のラインのみを有する画像を表す。EVENは、プログレッシブ方式の左入力画像、右入力画像からインタレース化により作成された奇数番目のラインのみを有する画像を表す。Fx5(x5は1以上
の整数)は、その画像がインタレース化された左入力映像、右入力映像のx5番目のフィールドであることを表す。なお、図17では、簡単のため、プログレッシブ方式の左入力画像と右入力画像が6つのラインで構成されている例を示しているが、これに限定するものではない(ライン数はいくつでもよい)。
本実施例では、左入力映像と右入力映像を作成するステレオ撮像機に対して、上下オフセットが出ないように予め光軸のアライメントを行っておく。また、本実施例では、この撮像機において、プログレッシブ方式の立体映像(プログレッシブ方式の左入力映像と右入力映像)が作成されるものとする。そして、一方の映像(本実施例では左入力映像)に対しては通常のインタレース化を行い、他方の映像(右入力映像)に対しては1ライン分の上下オフセットをつけたオフセットインタレース化を行う。さらに、映像コンテンツ(インタレース化された立体映像)に左入力画像S1と右入力画像S2の間の垂直方向のずれ量を表すメタデータを付加する。本実施例では、1ライン分の上下オフセットの存在を示すメタデータ「上下オフセット=1」が付加される。
不図示のメタデータ取得部より取得したメタデータS3は左右比較部43に入力される。ベクトル発生部413は、探索ベクトルを発生する際に、垂直方向成分の値を予め取得したメタデータによる上下オフセットの値に限定する。
また、常に1ラインずれた理想的な上下オフセットが得られるため、左右間補間画像生成部14は、常に右入力画像の画素を用いた補間を行うことができる(右左間補間画像生成部24も同様に、常に左入力画像の画素を用いた補間を行うことができる)。それにより、ライン補間処理の結果(例えば、プログレッシブ映像)をより高画質化することができる。
なお、本実施例では、ステレオ撮像機に対して、上下オフセットが出ないように予め光軸のアライメントを行っておくものとしたが、ステレオ撮像機の光軸を厳密に1ラインずらしておいてもよい。それにより、1ライン分の上下オフセットを得ることができる。また、その場合には、ステレオ撮像機で作成された左入力映像と右入力映像の両方に対して通常のインタレース化を行えばよい。
また、ステレオ撮像機の光軸が厳密に合わせられていない場合には、上下オフセットが1ライン分になるように、左入力映像と右入力映像を画像処理により調整してもよい。
13 左フィールド間補間画像生成部
14 左右間補間画像生成部
15 左画素選択部
30 左右比較部
40 オフセット検出部
Claims (20)
- 同一対象を異なる視点から撮影した第1画像と第2画像を用いて、前記第1画像のライン間を補間する画像処理装置であって、
前記第1画像と前記第2画像を比較し、それらの画像間の垂直方向のずれ量を算出する算出手段と、
前記ずれ量が誤りであるか否かを判定する判定手段と、
前記ずれ量と前記判定手段の判定結果に基づいて、前記第1画像のライン間に補間ラインを生成する生成手段と、
を有し、
前記生成手段は、
前記ずれ量が誤りではないと判定された場合、補間ラインの生成位置に対し、前記第2画像において該生成位置から前記ずれ量の分だけずれた位置に存在するラインを用いて補間ラインを生成する2画像間補間処理により補間画素を生成し、
前記ずれ量が誤りであると判定された場合、フィールド内補間処理により補間画素を生成することを特徴とする画像処理装置。 - 前記算出手段は、前記第1画像を複数の分割領域に分割し、分割領域毎に前記ずれ量を算出し、
前記生成手段は、分割領域毎に補間ラインを生成することを特徴とする請求項1に記載の画像処理装置。 - 前記2画像間補間処理は、
補間ラインの生成位置に対し、前記第2画像において該生成位置から前記ずれ量の分だけずれた位置にラインが存在する場合には、前記第2画像における該ラインを用いて補間ラインを生成し、
補間ラインの生成位置に対し、前記第2画像において該生成位置から前記ずれ量の分だけずれた位置にラインが存在しない場合には、前記第1画像における該生成位置の上下のラインを用いて補間ラインを生成する処理であることを特徴とする請求項1または2に記載の画像処理装置。 - 前記2画像間補間処理は、更に、
補間ラインの生成位置に対し、前記ずれ量が整数ライン分でない場合には、前記第1画像における該生成位置の上下のライン、及び、前記第2画像における該生成位置から前記ずれ量の分だけずれた位置の上下のラインを用いて、補間ラインを生成する処理であることを特徴とする請求項3に記載の画像処理装置。 - 前記第1画像は、インタレース映像の1つのフィールドであり、
前記画像処理装置は、前記第1画像の動きを検出する動き検出手段を更に有し、
前記生成手段は、補間ラインを生成する際に、
前記第1画像の動きのない領域内にはフィールド間補間処理により補間画素を生成し、
前記第1画像の動きのある領域内には前記2画像間補間処理により補間画素を生成することを特徴とする請求項1〜4のいずれか1項に記載の画像処理装置。 - 前記生成手段は、補間ラインを生成する際に、前記第1画像の動きのある領域内であって、且つ、算出されたずれ量が誤りであると判断された領域内には、フィールド内補間処理により補間画素を生成することを特徴とする請求項5に記載の画像処理装置。
- 前記算出手段は、前記第1画像を複数の分割領域に分割し、分割領域毎に前記ずれ量を算出し、
前記判定手段は、注目する分割領域に対するずれ量と、前記注目する分割領域とその周囲の分割領域のそれぞれに対するずれ量の代表値とを比較することにより、前記注目する分割領域に対するずれ量が誤りか否かを判断することを特徴とする請求項1〜6のいずれか1項に記載の画像処理装置。 - 前記算出手段は、前記第1画像と同様に前記第2画像を複数の分割領域に分割し、前記第2画像の分割領域毎に前記ずれ量を更に算出し、
前記判定手段は、前記第2画像の分割領域のうち、前記注目する分割領域と位置が同じ分割領域とその周囲の分割領域に対するずれ量の符号を反転したものを更に含めて、前記代表値を決定することを特徴とする請求項7に記載の画像処理装置。 - 前記第1画像と前記第2画像の間の垂直方向のずれ量を表すメタデータを取得する取得手段を更に有し、
前記算出手段は、前記メタデータが表すずれ量を用いることを特徴とする請求項1〜8のいずれか1項に記載の画像処理装置。 - 前記第1の画像と前記第2の画像はそれぞれ、立体画像を構成する左目用画像又は右目用画像であり、
前記算出手段は、前記第1画像を複数の分割領域に分割し、前記第2画像との間でブロックマッチングを行うことにより、分割領域毎にずれ量を算出するものであって、
前記第1画像が左目用画像である場合、ブロックマッチングで探索する範囲は注目する分割領域の位置に対して左側の方が右側より広く、
前記第1画像が右目用画像である場合、ブロックマッチングで探索する範囲は注目する分割領域の位置に対して右側の方が左側より広い
ことを特徴とする請求項1〜9のいずれか1項に記載の画像処理装置。 - 同一対象を異なる視点から撮影した第1画像と第2画像を用いて、前記第1画像のライン間を補間する画像処理装置の制御方法であって、
前記第1画像と前記第2画像を比較し、それらの画像間の垂直方向のずれ量を算出する算出ステップと、
前記ずれ量が誤りであるか否かを判定する判定ステップと、
前記ずれ量と前記判定ステップの判定結果に基づいて、前記第1画像のライン間に補間ラインを生成する生成ステップと、
を有し、
前記生成ステップでは、
前記ずれ量が誤りではないと判定された場合、補間ラインの生成位置に対し、前記第2画像において該生成位置から前記ずれ量の分だけずれた位置に存在するラインを用いて補間ラインを生成する2画像間補間処理により補間画素を生成し、
前記ずれ量が誤りであると判定された場合、フィールド内補間処理により補間画素を生成することを特徴とする画像処理装置の制御方法。 - 前記算出ステップでは、前記第1画像を複数の分割領域に分割し、分割領域毎に前記ずれ量を算出し、
前記生成ステップでは、分割領域毎に補間ラインを生成することを特徴とする請求項11に記載の画像処理装置の制御方法。 - 前記2画像間補間処理は、
補間ラインの生成位置に対し、前記第2画像において該生成位置から前記ずれ量の分だけずれた位置にラインが存在する場合には、前記第2画像における該ラインを用いて補間ラインを生成し、
補間ラインの生成位置に対し、前記第2画像において該生成位置から前記ずれ量の分だけずれた位置にラインが存在しない場合には、前記第1画像における該生成位置の上下のラインを用いて補間ラインを生成する処理であることを特徴とする請求項11または12に記載の画像処理装置の制御方法。 - 前記2画像間補間処理は、更に、
補間ラインの生成位置に対し、前記ずれ量が整数ライン分でない場合には、前記第1画像における該生成位置の上下のライン、及び、前記第2画像における該生成位置から前記ずれ量の分だけずれた位置の上下のラインを用いて、補間ラインを生成する処理であることを特徴とする請求項13に記載の画像処理装置の制御方法。 - 前記第1画像は、インタレース映像の1つのフィールドであり、
前記画像処理装置の制御方法は、前記第1画像の動きを検出する動き検出ステップを更に有し、
前記生成ステップでは、補間ラインを生成する際に、
前記第1画像の動きのない領域内にはフィールド間補間処理により補間画素を生成し、
前記第1画像の動きのある領域内には前記2画像間補間処理により補間画素を生成することを特徴とする請求項11〜14のいずれか1項に記載の画像処理装置の制御方法。 - 前記生成ステップでは、補間ラインを生成する際に、前記第1画像の動きのある領域内であって、且つ、算出されたずれ量が誤りであると判断された領域内には、フィールド内補間処理により補間画素を生成することを特徴とする請求項15に記載の画像処理装置の制御方法。
- 前記算出ステップでは、前記第1画像を複数の分割領域に分割し、分割領域毎に前記ずれ量を算出し、
前記判定ステップでは、注目する分割領域に対するずれ量と、前記注目する分割領域とその周囲の分割領域のそれぞれに対するずれ量の代表値とを比較することにより、前記注目する分割領域に対するずれ量が誤りか否かを判断することを特徴とする請求項11〜16のいずれか1項に記載の画像処理装置の制御方法。 - 前記算出ステップでは、前記第1画像と同様に前記第2画像を複数の分割領域に分割し、前記第2画像の分割領域毎に前記ずれ量を更に算出し、
前記判定ステップでは、前記第2画像の分割領域のうち、前記注目する分割領域と位置が同じ分割領域とその周囲の分割領域に対するずれ量の符号を反転したものを更に含めて、前記代表値を決定することを特徴とする請求項17に記載の画像処理装置の制御方法。 - 前記第1画像と前記第2画像の間の垂直方向のずれ量を表すメタデータを取得する取得ステップを更に有し、
前記算出ステップでは、前記メタデータが表すずれ量を用いることを特徴とする請求項11〜18のいずれか1項に記載の画像処理装置の制御方法。 - 前記第1の画像と前記第2の画像はそれぞれ、立体画像を構成する左目用画像又は右目用画像であり、
前記算出ステップでは、前記第1画像を複数の分割領域に分割し、前記第2画像との間でブロックマッチングを行うことにより、分割領域毎にずれ量を算出し、
前記第1画像が左目用画像である場合、ブロックマッチングで探索する範囲は注目する分割領域の位置に対して左側の方が右側より広く、
前記第1画像が右目用画像である場合、ブロックマッチングで探索する範囲は注目する分割領域の位置に対して右側の方が左側より広い
ことを特徴とする請求項11〜19のいずれか1項に記載の画像処理装置の制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010069926A JP5489809B2 (ja) | 2010-03-25 | 2010-03-25 | 画像処理装置および画像処理装置の制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010069926A JP5489809B2 (ja) | 2010-03-25 | 2010-03-25 | 画像処理装置および画像処理装置の制御方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2011205346A JP2011205346A (ja) | 2011-10-13 |
| JP2011205346A5 JP2011205346A5 (ja) | 2013-05-02 |
| JP5489809B2 true JP5489809B2 (ja) | 2014-05-14 |
Family
ID=44881524
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010069926A Expired - Fee Related JP5489809B2 (ja) | 2010-03-25 | 2010-03-25 | 画像処理装置および画像処理装置の制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5489809B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20150002624A1 (en) * | 2012-01-20 | 2015-01-01 | Panasonic Corporation | Video signal processing device and video signal processing method |
| JP2014187601A (ja) * | 2013-03-25 | 2014-10-02 | Sony Corp | 画像処理装置、画像処理方法、及び、プログラム |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06269025A (ja) * | 1993-03-16 | 1994-09-22 | Fujitsu Ltd | 多眼式立体映像の符号化方式 |
| JPH089342A (ja) * | 1994-06-16 | 1996-01-12 | Mitsubishi Electric Corp | ハイビジョン受像機 |
| JP3157384B2 (ja) * | 1994-06-20 | 2001-04-16 | 三洋電機株式会社 | 立体映像装置 |
| JPH1013860A (ja) * | 1996-04-26 | 1998-01-16 | Victor Co Of Japan Ltd | 立体画像補間装置及びその方法 |
| JP2000156846A (ja) * | 1998-11-19 | 2000-06-06 | Victor Co Of Japan Ltd | 動画像フォーマット変換装置及びその方法 |
| JP4424640B2 (ja) * | 2000-10-20 | 2010-03-03 | 日本テレビ放送網株式会社 | 立体映像信号生成方法及び伝送方法と、そのシステム |
| JP2003296740A (ja) * | 2002-04-08 | 2003-10-17 | Victor Co Of Japan Ltd | オブジェクト監視方法及びオブジェクト監視カメラ装置 |
| JP4440067B2 (ja) * | 2004-10-15 | 2010-03-24 | キヤノン株式会社 | 立体表示のための画像処理プログラム、画像処理装置および立体表示システム |
| JP2006128842A (ja) * | 2004-10-27 | 2006-05-18 | Texnai:Kk | 立体映像信号生成装置 |
| JP4780046B2 (ja) * | 2007-06-19 | 2011-09-28 | 日本ビクター株式会社 | 画像処理方法、画像処理装置及び画像処理プログラム |
| JP5127633B2 (ja) * | 2008-08-25 | 2013-01-23 | 三菱電機株式会社 | コンテンツ再生装置および方法 |
-
2010
- 2010-03-25 JP JP2010069926A patent/JP5489809B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2011205346A (ja) | 2011-10-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5127633B2 (ja) | コンテンツ再生装置および方法 | |
| JP5575891B2 (ja) | 自動三次元ビデオフォーマット変換方法及びその装置 | |
| JP5529870B2 (ja) | 二次元/三次元再生モード決定方法、二次元/三次元再生モード決定装置及び記憶媒体 | |
| JP5421647B2 (ja) | 撮像装置及びその制御方法 | |
| JP2010062695A (ja) | 画像処理装置、および画像処理方法、並びにプログラム | |
| JP2009244502A (ja) | 画像処理装置、画像表示装置、撮像装置及び画像処理方法 | |
| JP2011223493A (ja) | 画像処理装置および画像処理方法 | |
| US8941718B2 (en) | 3D video processing apparatus and 3D video processing method | |
| JP5454569B2 (ja) | 立体映像データ処理装置および立体映像データ処理方法 | |
| JP5424926B2 (ja) | 映像処理装置、映像処理方法 | |
| JP5489809B2 (ja) | 画像処理装置および画像処理装置の制御方法 | |
| JP2005020606A (ja) | デジタルカメラ | |
| JP2009200985A (ja) | 映像処理装置 | |
| US8330799B2 (en) | Image output apparatus and image output method | |
| US20150002624A1 (en) | Video signal processing device and video signal processing method | |
| CN101437136B (zh) | 图像处理设备 | |
| JP2013126123A (ja) | 画像処理装置、撮像装置及び画像処理方法 | |
| JP5700998B2 (ja) | 立体映像表示装置及びその制御方法 | |
| JP5090857B2 (ja) | 画像処理装置及び画像処理方法並びにプログラム | |
| JP5733139B2 (ja) | 動きベクトル検出装置及び方法、並びに、映像信号処理装置及び方法 | |
| JP2007129400A (ja) | フィルムモード検出装置及び映像表示装置 | |
| WO2011114745A1 (ja) | 映像再生装置 | |
| JP2009124261A5 (ja) | ||
| JP2005527156A (ja) | モーションアーティファクトを取り除く画像デインターレースシステム及び関連方法 | |
| JP2011071662A (ja) | 三次元画像処理装置及び三次元画像処理方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130314 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130314 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20131031 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131112 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140107 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140128 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140225 |
|
| LAPS | Cancellation because of no payment of annual fees |