JP5479552B2 - 1軸1舵船の定点位置保持方法とその装置 - Google Patents
1軸1舵船の定点位置保持方法とその装置 Download PDFInfo
- Publication number
- JP5479552B2 JP5479552B2 JP2012205700A JP2012205700A JP5479552B2 JP 5479552 B2 JP5479552 B2 JP 5479552B2 JP 2012205700 A JP2012205700 A JP 2012205700A JP 2012205700 A JP2012205700 A JP 2012205700A JP 5479552 B2 JP5479552 B2 JP 5479552B2
- Authority
- JP
- Japan
- Prior art keywords
- ship
- target
- control
- target position
- region
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


Landscapes
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
Description
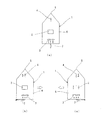
2…定点位置保持装置
3…プロペラ
4…サイドスラスタ(バウスラスタ)
5…船首
6…船体
7…舵(高揚力舵)
8…船首優先制御
9…位置回復制御
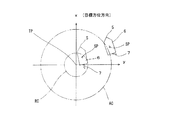
RC…目標円
AC…制御円
SP…船位
TP…目標位置
Claims (10)
- 船首方位を制御でき、かつ前後方向と左右方向とを同時に制御できない船舶に適用される定点位置保持方法であって、
前記目標位置に対する現船位の相対位置が前方向にずれている場合は後進制御によって船位を目標位置に復帰させるように制御するとともに、船体の船尾が目標位置を向くように船首方位を制御し、
前記目標位置に対する現船位の相対位置が後方向にずれている場合は前進制御によって船位を目標位置に復帰させるように制御するとともに、船体の船首が目標位置を向くように船首方位を制御し、
前記目標位置に対する現船位の相対位置が左方向にずれている場合は右進制御によって船位を目標位置に復帰させるように制御するとともに、船体の右舷が目標位置を向くように船首方位を制御し、
前記目標位置に対する現船位の相対位置が右方向にずれている場合は左進制御によって船位を目標位置に復帰させるように制御するとともに、船体の左舷が目標位置を向くように船首方位を制御することで、船位を目標位置に復帰させる定点位置保持方法。 - 船首方位を制御でき、かつ前後方向と左右方向とを同時に制御できない船舶に適用される定点位置保持方法であって、
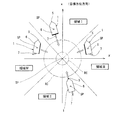
目標方位方向をX軸の正方向とし、
目標方位方向を上方から見て時計回りに90度回転させた方向をY軸の正方向とし、
前記X軸と前記Y軸とによる直交座標系の交点を目標位置とし、
前記X軸の正の部分を含む領域を第1領域とし、
前記X軸の負の部分を含む領域を第2領域とし、
前記Y軸の正の部分を含む領域を第3領域とし、
前記Y軸の負の部分を含む領域を第4領域として前記直交座標系を目標位置を中心とする4つの領域とした場合に、
船位が第1領域内にある場合には、船尾を目標位置側に向けながら船舶を後進制御し、
船位が第2領域内にある場合には、船首を目標位置側に向けながら船舶を前進制御し、
船位が第3領域内にある場合には、左舷を目標位置側に向けながら船舶を左進制御し、
船位が第4領域内にある場合には、右舷を目標位置側に向けながら船舶を右進制御することによって船位を目標位置に復帰させる定点位置保持方法。 - 船首方位を制御でき、かつ前後方向と左右方向とを同時に制御できない船舶に適用される定点位置保持方法であって、
目標位置を中心とする目標範囲と、該目標範囲を含む制御範囲とを設定し、
船位が前記目標範囲内にある場合には船首方位を目標方位に制御する船首優先制御を行い、
船位が前記制御範囲外にある場合には、
船体の目標位置側が目標位置を向くように船首方位を制御するとともに、
前記目標位置に対する現船位の相対位置が前後方向にずれている場合は前後進制御によって船位を目標位置に復帰させるように制御し、
前記目標位置に対する現船位の相対位置が左右方向にずれている場合は左右進制御によって船位を目標位置に復帰させるように制御し、
前後進制御と左右進制御とを切り換えて船位を目標位置に復帰させる定点位置保持方法。 - 船首方位を制御でき、かつ前後方向と左右方向とを同時に制御できない船舶に適用される定点位置保持方法であって、
目標位置を中心とする目標範囲と、該目標範囲を含む制御範囲とを設定し、
船位が前記目標範囲内にある場合には船首方位を目標方位に制御する船首優先制御を行い、
船位が前記制御範囲外にある場合には、
目標方位方向をX軸の正方向とし、
目標方位方向を上方から見て時計回りに90度回転させた方向をY軸の正方向とし、
前記X軸と前記Y軸とによる直交座標系の交点を目標位置とし、
前記X軸の正の部分を含む領域を第1領域とし、
前記X軸の負の部分を含む領域を第2領域とし、
前記Y軸の正の部分を含む領域を第3領域とし、
前記Y軸の負の部分を含む領域を第4領域として前記直交座標系を目標位置を中心とする4つの領域とした場合に、
船舶が第1領域に存在する場合には、船尾を目標位置側に向けながら船舶を後進制御し、
船舶が第2領域に存在する場合には、船首を目標位置側に向けながら船舶を前進制御し、
船舶が第3領域に存在する場合には、左舷を目標位置側に向けながら船舶を左進制御し、
船舶が第4領域に存在する場合には、右舷を目標位置側に向けながら船舶を右進制御することによって船位を目標位置に復帰させる定点位置保持方法。 - 前記船舶が、船首側にサイドスラスタを備え、船尾側に可変ピッチプロペラと高揚力舵とを備えた船舶である請求項1〜4のいずれかに記載の定点位置保持方法。
- 船首方位を制御でき、かつ前後方向と左右方向とを同時に制御できない船舶に適用される定点位置保持装置であって、
前記目標位置に対する現船位の相対位置が前方向にずれている場合は後進制御によって船位を目標位置に復帰させるように制御するとともに、船体の船尾が目標位置を向くように船首方位を制御する機能と、
前記目標位置に対する現船位の相対位置が後方向にずれている場合は前進制御によって船位を目標位置に復帰させるように制御するとともに、船体の船首が目標位置を向くように船首方位を制御する機能と、
前記目標位置に対する現船位の相対位置が左方向にずれている場合は右進制御によって船位を目標位置に復帰させるように制御するとともに、船体の右舷が目標位置を向くように船首方位を制御する機能と、
前記目標位置に対する現船位の相対位置が右方向にずれている場合は左進制御によって船位を目標位置に復帰させるように制御するとともに、船体の左舷が目標位置を向くように船首方位を制御する機能と、を備えた定点位置保持装置。 - 船首方位を制御でき、かつ前後方向と左右方向とを同時に制御できない船舶に適用される定点位置保持装置であって、
目標方位方向をX軸の正方向とし、
目標方位方向を上方から見て時計回りに90度回転させた方向をY軸の正方向とし、
前記X軸と前記Y軸とによる直交座標系の交点を目標位置とし、
前記X軸の正の部分を含む領域を第1領域とし、
前記X軸の負の部分を含む領域を第2領域とし、
前記Y軸の正の部分を含む領域を第3領域とし、
前記Y軸の負の部分を含む領域を第4領域として前記直交座標系を目標位置を中心とする4つの領域とした場合に、
船位が第1領域内にある場合には、船尾を目標位置側に向けながら船舶を後進制御する機能と、
船位が第2領域内にある場合には、船首を目標位置側に向けながら船舶を前進制御する機能と、
船位が第3領域内にある場合には、左舷を目標位置側に向けながら船舶を左進制御する機能と、
船位が第4領域内にある場合には、右舷を目標位置側に向けながら船舶を右進制御する機能と、を備えることによって船位を目標位置に復帰させる定点位置保持装置。 - 船首方位を制御でき、かつ前後方向と左右方向とを同時に制御できない船舶に適用される定点位置保持装置であって、
目標位置を中心とする目標範囲と、該目標範囲を含む制御範囲とを設定し、
船位が前記目標範囲内にある場合には船首方位を目標方位に制御する船首優先制御を行う機能と、
船位が前記制御範囲外にある場合には、
船体の目標位置側が目標位置を向くように船首方位を制御する機能と、
前記目標位置に対する現船位の相対位置が前後方向にずれている場合は前後進制御によって船位を目標位置に復帰させるように制御する機能と、
前記目標位置に対する現船位の相対位置が左右方向にずれている場合は左右進制御によって船位を目標位置に復帰させるように制御する機能と、
前後進制御と左右進制御とを切り換えて船位を目標位置に復帰させる機能と、を備えた定点位置保持装置。 - 船首方位を制御でき、かつ前後方向と左右方向とを同時に制御できない船舶に適用される定点位置保持装置であって、
目標位置を中心とする目標範囲と、該目標範囲を含む制御範囲とを設定し、
船位が前記目標範囲内にある場合には船首方位を目標方位に制御する船首優先制御を行う機能と、
船位が前記制御範囲外にある場合には、
目標方位方向をX軸の正方向とし、
目標方位方向を上方から見て時計回りに90度回転させた方向をY軸の正方向とし、
前記X軸と前記Y軸とによる直交座標系の交点を目標位置とし、
前記X軸の正の部分を含む領域を第1領域とし、
前記X軸の負の部分を含む領域を第2領域とし、
前記Y軸の正の部分を含む領域を第3領域とし、
前記Y軸の負の部分を含む領域を第4領域として前記直交座標系を目標位置が中心となった4つの領域とした場合に、
船舶が第1領域に存在する場合には、船尾を目標位置側に向けながら船舶を後進制御する機能と、
船舶が第2領域に存在する場合には、船首を目標位置側に向けながら船舶を前進制御する機能と、
船舶が第3領域に存在する場合には、左舷を目標位置側に向けながら船舶を左進制御する機能と、
船舶が第4領域に存在する場合には、右舷を目標位置側に向けながら船舶を右進制御する機能と、を備えることによって船位を目標位置に復帰させる定点位置保持装置。 - 前記船舶が、船首側にサイドスラスタを備え、船尾側に可変ピッチプロペラと高揚力舵とを備えた船舶である請求項6〜9のいずれかに記載の定点位置保持装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012205700A JP5479552B2 (ja) | 2012-09-19 | 2012-09-19 | 1軸1舵船の定点位置保持方法とその装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012205700A JP5479552B2 (ja) | 2012-09-19 | 2012-09-19 | 1軸1舵船の定点位置保持方法とその装置 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007088714A Division JP5147273B2 (ja) | 2007-03-29 | 2007-03-29 | 1軸1舵船の定点位置保持方法とその装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012245979A JP2012245979A (ja) | 2012-12-13 |
| JP5479552B2 true JP5479552B2 (ja) | 2014-04-23 |
Family
ID=47466853
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012205700A Active JP5479552B2 (ja) | 2012-09-19 | 2012-09-19 | 1軸1舵船の定点位置保持方法とその装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5479552B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017088120A (ja) | 2015-11-17 | 2017-05-25 | ヤマハ発動機株式会社 | 船舶の操船制御方法および船舶の操船制御システム |
| JP2023068837A (ja) | 2021-11-04 | 2023-05-18 | ヤマハ発動機株式会社 | 船舶推進システムおよび船舶 |
| CN119781483B (zh) * | 2025-01-03 | 2025-08-19 | 广东海科船务有限公司 | 一种基于四锚定位的工程船航行方向控制系统及方法 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06270891A (ja) * | 1993-03-23 | 1994-09-27 | Nakashima Propeller Kk | 船舶の操船方法及び操船制御装置 |
| JP2926531B2 (ja) * | 1993-12-15 | 1999-07-28 | 三井造船株式会社 | 自動船位保持装置 |
| JP2003112691A (ja) * | 2001-10-05 | 2003-04-15 | Mitsubishi Heavy Ind Ltd | 水中航走体運動制御方法及びその運動制御装置 |
-
2012
- 2012-09-19 JP JP2012205700A patent/JP5479552B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2012245979A (ja) | 2012-12-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5147273B2 (ja) | 1軸1舵船の定点位置保持方法とその装置 | |
| US11597488B2 (en) | Ship maneuvering system, ship, and ship maneuvering method | |
| JP6036515B2 (ja) | 水中航走体 | |
| US7305928B2 (en) | Method for positioning a marine vessel | |
| US7267068B2 (en) | Method for maneuvering a marine vessel in response to a manually operable control device | |
| JP7249657B2 (ja) | 船舶の制御法 | |
| WO2020111044A1 (ja) | 制御目標生成装置及び操船制御装置 | |
| JP2017088111A (ja) | 船舶の操船制御方法および船舶の操船制御システム | |
| CN111465554A (zh) | 独立控制横向和纵向推力的航行系统 | |
| WO2018008589A1 (ja) | 船舶の操縦システム、船舶、及び船舶の操縦方法 | |
| CN104703876A (zh) | 用于船舶的控制系统、用于船舶的控制方法和程序 | |
| CN117580759A (zh) | 单轴双舵船的具有操舵角修正功能的操舵系统 | |
| WO2023153015A1 (ja) | 自動着桟機能を有する一軸二舵船 | |
| JPWO2018179447A1 (ja) | 船舶推進装置 | |
| JP5479552B2 (ja) | 1軸1舵船の定点位置保持方法とその装置 | |
| CN118270213A (zh) | 一种全自由度的船用推进系统和控制方法 | |
| JP2961594B2 (ja) | 船舶の航路保持制御方法及び装置 | |
| JP7618502B2 (ja) | 船舶用自動操舵装置 | |
| JP2964304B2 (ja) | 船舶の航路保持制御方法及び装置 | |
| KR20130125252A (ko) | 스러스터를 가지는 부유식 해양 구조물의 자동 항해 시스템 및 자동 항해 방법 | |
| CN113767351B (zh) | 船的控制 | |
| KR102376887B1 (ko) | 시추선의 방향전환 제어방법 | |
| US20250050989A1 (en) | Marine propulsion system enabling movement of marine vessel in lateral direction, and control method thereof | |
| US20250187714A1 (en) | Ship steering device | |
| JP2019014296A (ja) | 船舶、及び操船方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121001 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20121001 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130802 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130820 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131017 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140204 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140212 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5479552 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |