JP5425344B2 - 処置システム及び処置システムの作動方法 - Google Patents
処置システム及び処置システムの作動方法 Download PDFInfo
- Publication number
- JP5425344B2 JP5425344B2 JP2013526673A JP2013526673A JP5425344B2 JP 5425344 B2 JP5425344 B2 JP 5425344B2 JP 2013526673 A JP2013526673 A JP 2013526673A JP 2013526673 A JP2013526673 A JP 2013526673A JP 5425344 B2 JP5425344 B2 JP 5425344B2
- Authority
- JP
- Japan
- Prior art keywords
- treatment system
- heating element
- control mode
- temperature
- frequency power
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000011017 operating method Methods 0.000 title description 2
- 238000010438 heat treatment Methods 0.000 claims description 54
- 230000008859 change Effects 0.000 claims description 49
- 238000000034 method Methods 0.000 claims description 28
- 230000020169 heat generation Effects 0.000 claims description 17
- 210000000170 cell membrane Anatomy 0.000 claims description 9
- 230000006378 damage Effects 0.000 claims description 6
- 229910052739 hydrogen Inorganic materials 0.000 claims description 5
- 239000001257 hydrogen Substances 0.000 claims description 5
- 239000004020 conductor Substances 0.000 claims description 4
- 230000004044 response Effects 0.000 claims description 2
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 claims 2
- 230000007423 decrease Effects 0.000 description 8
- 230000008569 process Effects 0.000 description 8
- 206010037660 Pyrexia Diseases 0.000 description 5
- 230000000694 effects Effects 0.000 description 5
- 239000010409 thin film Substances 0.000 description 4
- 230000009471 action Effects 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 239000010408 film Substances 0.000 description 3
- 210000003811 finger Anatomy 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 102000004169 proteins and genes Human genes 0.000 description 3
- 108090000623 proteins and genes Proteins 0.000 description 3
- 230000002829 reductive effect Effects 0.000 description 3
- 102000008186 Collagen Human genes 0.000 description 2
- 108010035532 Collagen Proteins 0.000 description 2
- 238000005229 chemical vapour deposition Methods 0.000 description 2
- 229920001436 collagen Polymers 0.000 description 2
- 238000004891 communication Methods 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 238000005240 physical vapour deposition Methods 0.000 description 2
- 238000003825 pressing Methods 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 239000000126 substance Substances 0.000 description 2
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 1
- 125000002066 L-histidyl group Chemical group [H]N1C([H])=NC(C([H])([H])[C@](C(=O)[*])([H])N([H])[H])=C1[H] 0.000 description 1
- ZOKXTWBITQBERF-UHFFFAOYSA-N Molybdenum Chemical compound [Mo] ZOKXTWBITQBERF-UHFFFAOYSA-N 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- PNEYBMLMFCGWSK-UHFFFAOYSA-N aluminium oxide Inorganic materials [O-2].[O-2].[O-2].[Al+3].[Al+3] PNEYBMLMFCGWSK-UHFFFAOYSA-N 0.000 description 1
- 230000015556 catabolic process Effects 0.000 description 1
- 150000001875 compounds Chemical class 0.000 description 1
- 229910052802 copper Inorganic materials 0.000 description 1
- 239000010949 copper Substances 0.000 description 1
- PMHQVHHXPFUNSP-UHFFFAOYSA-M copper(1+);methylsulfanylmethane;bromide Chemical compound Br[Cu].CSC PMHQVHHXPFUNSP-UHFFFAOYSA-M 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 239000011888 foil Substances 0.000 description 1
- 238000000265 homogenisation Methods 0.000 description 1
- 230000002401 inhibitory effect Effects 0.000 description 1
- 230000003834 intracellular effect Effects 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 229910052750 molybdenum Inorganic materials 0.000 description 1
- 239000011733 molybdenum Substances 0.000 description 1
- 239000003870 refractory metal Substances 0.000 description 1
- 238000007650 screen-printing Methods 0.000 description 1
- 238000007789 sealing Methods 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
- 239000002470 thermal conductor Substances 0.000 description 1
- 210000003813 thumb Anatomy 0.000 description 1
Images










Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/08—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by means of electrically-heated probes
- A61B18/082—Probes or electrodes therefor
- A61B18/085—Forceps, scissors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/08—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by means of electrically-heated probes
- A61B18/10—Power sources therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/1206—Generators therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B18/1442—Probes having pivoting end effectors, e.g. forceps
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B18/1442—Probes having pivoting end effectors, e.g. forceps
- A61B18/1445—Probes having pivoting end effectors, e.g. forceps at the distal end of a shaft, e.g. forceps or scissors at the end of a rigid rod
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00642—Sensing and controlling the application of energy with feedback, i.e. closed loop control
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00642—Sensing and controlling the application of energy with feedback, i.e. closed loop control
- A61B2018/00654—Sensing and controlling the application of energy with feedback, i.e. closed loop control with individual control of each of a plurality of energy emitting elements
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00696—Controlled or regulated parameters
- A61B2018/00702—Power or energy
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00696—Controlled or regulated parameters
- A61B2018/00714—Temperature
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00773—Sensed parameters
- A61B2018/00791—Temperature
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00773—Sensed parameters
- A61B2018/00875—Resistance or impedance
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00773—Sensed parameters
- A61B2018/00886—Duration
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00994—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body combining two or more different kinds of non-mechanical energy or combining one or more non-mechanical energies with ultrasound
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/1206—Generators therefor
- A61B2018/1273—Generators therefor including multiple generators in one device
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B18/1442—Probes having pivoting end effectors, e.g. forceps
- A61B2018/146—Scissors
Description
<処置システムの構成>
最初に第1実施形態の処置システム10について説明する。
次に、処置システム10の作動方法について説明する。
術者は、操作パネル76、86を用いて処置条件を制御部94に入力し設定する。処置条件は、例えば、HFエネルギ印加モードの設定電力Pset(W)、熱エネルギ印加モードの設定温度Tset(℃)、及びHFエネルギ印加モード終了を判断するためのHFインピーダンスZの閾値Z1(Ω)等である。なお、処置条件については後に詳述する。
術者は処置具11のハンドル部34a、34bのリング33a、33bに指をかけて、処置具11を操作して、ジョー36a、36bで処置する生体組織を把持する。
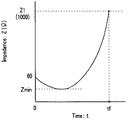
HFエネルギ印加が印加されると、生体組織の乾燥化が進むため、HFのインピーダンスZは上昇する。そして、インピーダンスZをもとに、把持した生体組織の細胞膜の破壊処理の完了が検知される。すなわち、破壊処理が完了すると、細胞膜内物質が放出されなくなるため、インピーダンスZの上昇が加速する。更にHFエネルギ印加はインピーダンスZが大きいと適切なエネルギ印加が困難となる。
一方、HF制御部74がインピーダンスZが閾値Z1を超えたと、判断した場合(S12:Yes)、HF制御部74は、HF出力を停止するように高周波電源73を制御する。
HF制御部74が、インピーダンスZが閾値Z1以上となったと判断した場合、HFユニット72のHF制御部74から通信線91を介してTHユニット82のTH制御部84に信号が伝達される。そして、HFエネルギ印加モードからTHエネルギ印加モードへの切り替えが行われる。
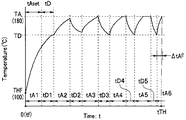
図7に、THエネルギ印加モードにおける、第1の温度TAが180℃、第2の温度TBが150℃の場合のヒーター部材53の温度変化を示す。
TH制御部84は、ヒーター部材53の温度が第1の温度TAとなるまでの時間ΔtAが、所定の閾値時間(ΔtAF)以下かどうかを判断する。
時間ΔtAが、所定の閾値時間(ΔtAF)以下の場合(S16:Yes)、すなわち、時間tTHにおいて、制御部94は熱エネルギの印加を終了するように発熱用電源83を制御する。
時間ΔtAが、所定の閾値時間(ΔtAF)を超える場合(S16:No)、制御部94は、第1制御モード設定時間(tAset)になるまでは(S18:No)、第1制御モードによる熱エネルギの印加を継続する。すなわち、ステップS16からの処理が繰り返される。
第1制御モード設定時間(tAset)が経過すると(S18:Yes)、TH制御部84は、ヒーター部材53の温度が第2の温度TBとなるように発熱用電源83を制御する第2制御モード(tB1〜tA5)に制御モードを変更する。
制御部94は、第2制御モード設定時間(tBset)になるまでは(S20:No)、第2制御モードによる熱エネルギの印加を継続する。すなわち、ステップS19からの処理が繰り返される。
次に、第2実施形態の処置システム10Aについて説明する。処置システム10Aは、処置システム10と類似しているので、同じ機能の構成要素には同じ符号を付し、説明は省略する。
次に、第3実施形態の処置システム10Bについて説明する。処置システム10Bは、処置システム10等と類似しているので、同じ機能の構成要素には同じ符号を付し、説明は省略する。
次に、第4実施形態の処置システム10Cについて説明する。処置システム10Cは、処置システム10〜10Bと類似しているので、同じ機能の構成要素には同じ符号を付し、説明は省略する。
次に、第5実施形態の処置システム10Dについて説明する。処置システム10Dは、処置システム10等と類似しているので、同じ機能の構成要素には同じ符号を付し、説明は省略する。
本出願は、2011年12月12日に米国に出願された出願番号61/569、336を優先権主張の基礎として出願するものであり、上記の開示内容は、本願明細書、請求の範囲、図面に引用されたものとする。
Claims (18)
- 高周波電力を出力する高周波電源と、
発熱用電力を出力する発熱用電源と、
生体組織に前記高周波電力を高周波電力エネルギとして印加する導電体と、前記生体組織に前記発熱用電力を熱エネルギとして印加する発熱素子と、を有する把持部材と、
前記高周波電力エネルギ印加終了後に、前記熱エネルギの印加を開始するように前記高周波電源及び前記発熱用電源を制御するとともに、前記熱エネルギの印加開始後は、前記発熱素子が第1の温度となるように制御する第1制御モードと、前記発熱素子が第1の温度よりも低くなるように制御する第2制御モードと、を繰り返し、前記第1制御モードまたは前記第2制御モードにおける前記発熱素子の温度変化に基づいた温度変化パラメータに応じて、前記熱エネルギの印加を終了するように前記発熱用電源を制御する制御部と、を具備することを特徴とする処置システム。 - 前記温度変化パラメータが、前記発熱素子が所定温度に到達するまでの時間、または、前記発熱素子の温度変化速度の少なくともいずれかであることを特徴とする請求項1に記載の処置システム。
- 前記高周波電力のインピーダンス変化に基づき、前記生体組織の細胞膜の破壊処理の完了を検知すると高周波電力エネルギの印加を終了し、前記熱エネルギの印加により前記生体組織の水分を除去し水素結合により前記生体組織を接合することを特徴とする請求項2に記載の処置システム。
- 前記第2制御モードにおいて、前記発熱素子が第2の温度となるように制御することを特徴とする請求項2に記載の処置システム。
- 前記第2制御モードにおいて前記発熱素子が所定温度になると、前記第1制御モードに切り替わることを特徴とする請求項2に記載の処置システム。
- 前記温度変化パラメータが、前記第2制御モードの時間であることを特徴とする請求項5に記載の処置システム。
- 前記高周波電源と前記発熱用電源とが共通の電源からなることを特徴とする請求項2に記載の処置システム。
- 前記把持部材が、第1発熱素子を有する第1把持部材と、第2発熱素子を有する第2把持部材と、からなり、
前記第1制御モードでは前記第1発熱素子に、前記第2制御モードでは前記第2発熱素子に、前記発熱用電力を供給するための切替スイッチを具備し、
前記第1制御モードにおける前記第1発熱素子または前記第2発熱素子の前記温度変化パラメータに応じて、前記熱エネルギの印加を終了することを特徴とする請求項2に記載の処置システム。 - 前記高周波電力のインピーダンス変化に基づき、前記生体組織の細胞膜の破壊処理の完了を検知すると高周波電力エネルギの印加を終了し、前記熱エネルギの印加により前記生体組織の水分を除去し水素結合により前記生体組織を接合することを特徴とする請求項2に記載の処置システム。
- 前記高周波電源と前記発熱用電源とが共通の電源からなることを特徴とする請求項2に記載の処置システム。
- 高周波電力エネルギと熱エネルギとを印加する把持部材と、前記高周波電力エネルギを印加するための高周波電力を出力する高周波電源と、前記熱エネルギを印加するための発熱用電力を出力する発熱用電源と、を具備する処置システムの前記高周波電源が、前記高周波電力を、前記把持部材の電極に印加するように制御部が制御するステップと、
前記制御部による前記高周波電力エネルギの印加終了制御後に、前記制御部が、前記熱エネルギを印加するための発熱素子が第1の温度となるように制御する第1制御モードと、前記発熱素子が第1の温度よりも低くなるように制御する第2制御モードと、を繰り返すことで、前記熱エネルギを印加しながら、前記第1制御モードまたは前記第2制御モードにおける前記発熱素子の温度変化に基づいて温度変化パラメータが前記制御部により取得されるステップと、
前記制御部が、前記温度変化パラメータに応じて、前記熱エネルギの印加を終了するように前記発熱用電源を制御するステップと、を具備することを特徴とする処置システムの作動方法。 - 前記温度変化パラメータが、前記発熱素子が所定温度に到達するまでの時間、または、前記発熱素子の温度変化速度の少なくともいずれかであることを特徴とする請求項11に記載の処置システムの作動方法
- 前記第2制御モードにおいて、前記発熱素子が第2の温度となるように制御されることを特徴とする請求項11に記載の処置システムの作動方法。
- 前記第2制御モードにおいて前記発熱素子が所定温度になると、前記第1制御モードに切り替わることを特徴とする請求項11に記載の処置システムの作動方法。
- 前記温度変化パラメータが、前記第2制御モードの時間であることを特徴とする請求項14に記載の処置システムの作動方法。
- 前記高周波電源と前記発熱用電源とが共通の電源からなることを特徴とする請求項11に記載の処置システムの作動方法。
- 前記把持部材が、第1発熱素子を有する第1把持部材と、第2発熱素子を有する第2把持部材と、からなり、
前記第1制御モードでは前記第1発熱素子に、前記第2制御モードでは前記第2発熱素子に、前記発熱用電力を供給するための切替スイッチを具備し、
前記第1制御モードにおける前記第1発熱素子または前記第2発熱素子の前記温度変化パラメータに応じて、前記熱エネルギの印加が終了することを特徴とする請求項11に記載の処置システムの作動方法。 - 前記高周波電源と前記発熱用電源とが共通の電源からなることを特徴とする請求項11に記載の処置システムの作動方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201161569336P | 2011-12-12 | 2011-12-12 | |
| US61/569336 | 2011-12-12 | ||
| PCT/JP2012/079373 WO2013088893A1 (ja) | 2011-12-12 | 2012-11-13 | 処置システム及び処置システムの制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP5425344B2 true JP5425344B2 (ja) | 2014-02-26 |
| JPWO2013088893A1 JPWO2013088893A1 (ja) | 2015-04-27 |
Family
ID=48612348
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013526673A Active JP5425344B2 (ja) | 2011-12-12 | 2012-11-13 | 処置システム及び処置システムの作動方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (2) | US9119619B2 (ja) |
| EP (1) | EP2745793B1 (ja) |
| JP (1) | JP5425344B2 (ja) |
| CN (1) | CN103747755B (ja) |
| WO (1) | WO2013088893A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10342596B2 (en) | 2013-08-02 | 2019-07-09 | Olympus Corporation | Living tissue bonding system, treatment instrument control apparatus, and operation method of living tissue bonding system |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3087941B1 (en) * | 2014-08-05 | 2020-03-11 | Olympus Corporation | Therapeutic treatment system |
| WO2016063360A1 (ja) * | 2014-10-21 | 2016-04-28 | オリンパス株式会社 | 医療用処置装置 |
| CN107405167B (zh) * | 2015-02-27 | 2020-06-16 | 奥林巴斯株式会社 | 医疗用处置装置和医疗用处置装置的工作方法 |
| WO2017221331A1 (ja) * | 2016-06-21 | 2017-12-28 | オリンパス株式会社 | 処置具 |
| CN109640853B (zh) | 2016-08-04 | 2021-10-22 | 奥林巴斯株式会社 | 控制装置 |
| DE112016007242T5 (de) * | 2016-10-28 | 2019-06-06 | Olympus Corporation | Medizinisches behandlungsgerät und betätigungsverfahren für ein medizinisches behandlungsgerät |
| WO2018167877A1 (ja) * | 2017-03-15 | 2018-09-20 | オリンパス株式会社 | エネルギー源装置 |
| WO2018167878A1 (ja) * | 2017-03-15 | 2018-09-20 | オリンパス株式会社 | エネルギー源装置 |
| WO2019003346A1 (ja) * | 2017-06-28 | 2019-01-03 | オリンパス株式会社 | 手術システムのハンドピースの製造方法、手術システムのハンドピースの特性の設定方法、手術システムのハンドピース及び手術システム |
Family Cites Families (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6216703B1 (en) * | 1998-05-08 | 2001-04-17 | Thermatrx, Inc. | Therapeutic prostatic thermotherapy |
| US20030171747A1 (en) * | 1999-01-25 | 2003-09-11 | Olympus Optical Co., Ltd. | Medical treatment instrument |
| US6287304B1 (en) * | 1999-10-15 | 2001-09-11 | Neothermia Corporation | Interstitial cauterization of tissue volumes with electrosurgically deployed electrodes |
| US7104987B2 (en) * | 2000-10-17 | 2006-09-12 | Asthmatx, Inc. | Control system and process for application of energy to airway walls and other mediums |
| US6740085B2 (en) * | 2000-11-16 | 2004-05-25 | Olympus Corporation | Heating treatment system |
| JP2002238916A (ja) * | 2001-02-14 | 2002-08-27 | Olympus Optical Co Ltd | 発熱処置装置 |
| US7160296B2 (en) * | 2001-05-10 | 2007-01-09 | Rita Medical Systems, Inc. | Tissue ablation apparatus and method |
| US20030073987A1 (en) * | 2001-10-16 | 2003-04-17 | Olympus Optical Co., Ltd. | Treating apparatus and treating device for treating living-body tissue |
| US7108694B2 (en) * | 2002-11-08 | 2006-09-19 | Olympus Corporation | Heat-emitting treatment device |
| US20050022560A1 (en) | 2003-07-03 | 2005-02-03 | Engelhard Corporation | Tank for melting solder glass |
| JP2005218749A (ja) * | 2004-02-09 | 2005-08-18 | Olympus Corp | 処置装置 |
| JP4624697B2 (ja) * | 2004-03-12 | 2011-02-02 | オリンパス株式会社 | 手術用処置具 |
| JP4472625B2 (ja) * | 2005-12-12 | 2010-06-02 | オリンパスメディカルシステムズ株式会社 | 発熱処置装置 |
| US20080015575A1 (en) * | 2006-07-14 | 2008-01-17 | Sherwood Services Ag | Vessel sealing instrument with pre-heated electrodes |
| US9265559B2 (en) * | 2007-02-25 | 2016-02-23 | Avent, Inc. | Electrosurgical method |
| US20090076506A1 (en) * | 2007-09-18 | 2009-03-19 | Surgrx, Inc. | Electrosurgical instrument and method |
| US8147443B2 (en) * | 2007-12-28 | 2012-04-03 | Boston Scientific Scimed, Inc. | Indirect fluid flow measurement |
| US8500736B2 (en) * | 2008-04-01 | 2013-08-06 | Olympus Medical Systems Corp. | Treatment method for living tissue using energy |
| US8500735B2 (en) * | 2008-04-01 | 2013-08-06 | Olympus Medical Systems Corp. | Treatment method for living tissue using energy |
| US9642669B2 (en) * | 2008-04-01 | 2017-05-09 | Olympus Corporation | Treatment system, and treatment method for living tissue using energy |
| US20100185196A1 (en) * | 2009-01-21 | 2010-07-22 | Satomi Sakao | Medical treatment apparatus, treatment instrument and treatment method for living tissue using energy |
| JP5658896B2 (ja) * | 2010-03-19 | 2015-01-28 | オリンパス株式会社 | 治療用処置システム |
| US8840609B2 (en) * | 2010-07-23 | 2014-09-23 | Conmed Corporation | Tissue fusion system and method of performing a functional verification test |
| US9539050B2 (en) * | 2011-04-12 | 2017-01-10 | Covidien Lp | System and method for process monitoring and intelligent shut-off |
-
2012
- 2012-11-13 JP JP2013526673A patent/JP5425344B2/ja active Active
- 2012-11-13 EP EP12857796.2A patent/EP2745793B1/en not_active Not-in-force
- 2012-11-13 CN CN201280038363.3A patent/CN103747755B/zh active Active
- 2012-11-13 WO PCT/JP2012/079373 patent/WO2013088893A1/ja active Application Filing
-
2013
- 2013-06-19 US US13/921,603 patent/US9119619B2/en active Active
-
2015
- 2015-07-27 US US14/809,486 patent/US10441341B2/en active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10342596B2 (en) | 2013-08-02 | 2019-07-09 | Olympus Corporation | Living tissue bonding system, treatment instrument control apparatus, and operation method of living tissue bonding system |
Also Published As
| Publication number | Publication date |
|---|---|
| US20130338659A1 (en) | 2013-12-19 |
| EP2745793A4 (en) | 2015-01-28 |
| JPWO2013088893A1 (ja) | 2015-04-27 |
| CN103747755A (zh) | 2014-04-23 |
| US9119619B2 (en) | 2015-09-01 |
| CN103747755B (zh) | 2016-05-11 |
| EP2745793B1 (en) | 2016-02-24 |
| WO2013088893A1 (ja) | 2013-06-20 |
| US10441341B2 (en) | 2019-10-15 |
| EP2745793A1 (en) | 2014-06-25 |
| US20150327916A1 (en) | 2015-11-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5425344B2 (ja) | 処置システム及び処置システムの作動方法 | |
| JP5544046B2 (ja) | 処置システムおよび処置システムの作動方法 | |
| JP5412602B2 (ja) | 処置システムおよび処置システムの作動方法 | |
| US9937001B2 (en) | Therapeutic treatment apparatus | |
| WO2018167878A1 (ja) | エネルギー源装置 | |
| WO2013088891A1 (ja) | 処置システム及び処置システムの制御方法 | |
| JP2005253789A (ja) | 手術用処置具 | |
| CN108463181B (zh) | 能量控制装置和处置系统 | |
| WO2017187523A1 (ja) | エネルギー処置具、処置システム及び制御装置 | |
| CN108135650B (zh) | 能量处置器具、处置系统和控制装置 | |
| CN108135652B (zh) | 能量处置器具、处置系统和控制装置 | |
| WO2016059999A1 (ja) | エネルギ処置具のための制御装置、及びエネルギ処置システム | |
| CN108135651B (zh) | 能量处置器具、处置系统和控制装置 | |
| WO2018167877A1 (ja) | エネルギー源装置 | |
| WO2018011972A1 (ja) | エネルギー処置具、制御装置及び処置システム | |
| JP2005230189A (ja) | 手術用処置装置 | |
| JP2001231791A (ja) | 電気手術装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20131112 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20131126 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5425344 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |