JP5410367B2 - 力覚付与型入力装置及び力覚付与型入力装置における自動中立復帰方法 - Google Patents
力覚付与型入力装置及び力覚付与型入力装置における自動中立復帰方法 Download PDFInfo
- Publication number
- JP5410367B2 JP5410367B2 JP2010116292A JP2010116292A JP5410367B2 JP 5410367 B2 JP5410367 B2 JP 5410367B2 JP 2010116292 A JP2010116292 A JP 2010116292A JP 2010116292 A JP2010116292 A JP 2010116292A JP 5410367 B2 JP5410367 B2 JP 5410367B2
- Authority
- JP
- Japan
- Prior art keywords
- driving
- operation lever
- maximum stroke
- operating lever
- stroke position
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Description
図1は、本発明の実施の形態による入力装置1の構成を示す外観斜視図である。この入力装置1は、XYの任意の方向へ回動操作可能な操作レバー11を備えている。操作レバー11は、円柱状の金属部材から形成され、そのシャフトが互いに直交するように設けられた第1キャリッジ12及び第2キャリッジ13の各長孔を貫通している。
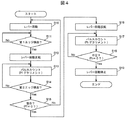
次に、第1の実施の形態の力覚付与型入力装置による中立復帰の動作を説明する。図4は、電源投入時に制御部2のCPUが操作レバー11を自動的に中立位置に復帰させる制御動作を示すフローチャートである。ここでは、図4のフローチャートに基づいてX方向における中立復帰の動作を説明するが、実際の制御ではY方向における復帰動作も同じ方法で同時に又は連続して行われる。
次に、第2の実施の形態の力覚付与型入力装置による中立復帰の動作を説明する。図5は、第2の実施の形態の制御部2による中立復帰の制御動作を示すフローチャートである。ここでは、X方向における中立復帰の動作を説明するが、実際の制御ではY方向における復帰動作も同じ方法で同時に又は連続して行われる。
次に、第3の実施の形態の力覚付与型入力装置による中立復帰の動作を説明する。ここで、図6は、第3の実施の形態の回転センサ32による出力特性の例をグラフで示す図である。この例では、操作レバー11がX方向における右側の第1エッジと左側の第2エッジの間のフルストロークの検出範囲において、Xモータ31が約2回転弱回転する構成となっている。図示はしないがもう1つの回転センサ37も同一の特性を有する。
Claims (4)
- 操作者に操作される操作レバーと、
前記操作レバーに対し力を付与して駆動可能な駆動手段と、
前記駆動手段に連結し当該駆動手段の駆動量に対応するパルス信号を出力する検出手段と、
前記操作レバーの最大ストローク位置を検出するエッジ検出手段と、
電源投入時に前記駆動手段により前記操作レバーを一の方向に駆動させ、前記エッジ検出手段が前記操作レバーの第1の最大ストローク位置を検出したとき前記駆動手段により前記操作レバーを他の方向に反転駆動させ、前記エッジ検出手段が前記操作レバーの第2の最大ストローク位置を検出したとき前記操作レバーの前記第1の最大ストローク位置から前記第2の最大ストローク位置までの駆動に対応するパルス信号を前記検出手段が出力した場合に整合性があると判断し、当該整合性がある場合に前記駆動手段により前記操作レバーを再び前記一の方向に駆動させ、前記検出手段が前記操作レバーの前記第2の最大ストローク位置から中立位置までの駆動に対応するパルス信号を出力したとき前記駆動手段による駆動を停止して前記操作レバーを中立位置に復帰させる自動中立復帰手段と、を備える力覚付与型入力装置。 - 操作者に操作される操作レバーと、
前記操作レバーに対し力を付与して駆動可能な駆動手段と、
前記駆動手段に連結し当該駆動手段の駆動量に対応するパルス信号を出力する検出手段と、
前記操作レバーの最大ストローク位置を検出するエッジ検出手段と、
電源投入時に前記駆動手段により前記操作レバーを一の方向に駆動させ、前記エッジ検出手段が前記操作レバーの最大ストローク位置を検出したとき前記駆動手段により前記操作レバーを他の方向に反転駆動させ、前記検出手段が前記操作レバーの前記最大ストローク位置から中立位置までの駆動に対応するパルス信号を出力したとき前記駆動手段による駆動を停止して前記操作レバーを中立位置に復帰させる自動中立復帰手段と、を備える力覚付与型入力装置。 - 操作者に操作される操作レバーと、前記操作レバーに対し力を付与して駆動可能な駆動手段と、前記駆動手段に連結し当該駆動手段の駆動量に対応するパルス信号を出力する検出手段と、前記操作レバーの最大ストローク位置を検出するエッジ検出手段と、前記操作レバーを中立位置に復帰させる自動中立復帰手段と、を備える力覚付与型入力装置における自動中立復帰方法であって、
電源投入時に前記駆動手段が前記操作レバーを一の方向に駆動するステップと、
前記エッジ検出手段が前記操作レバーの最大ストローク位置を検出したとき前記駆動手段が前記操作レバーを他の方向に反転駆動するステップと、
前記検出手段が前記操作レバーの前記最大ストローク位置から中立位置までの駆動に対応するパルス信号を出力したとき前記駆動手段が前記操作レバーの駆動を停止するステップと、を備える力覚付与型入力装置における自動中立復帰方法。 - 操作者に操作される操作レバーと、前記操作レバーに対し力を付与して駆動可能な駆動手段と、前記駆動手段に連結し当該駆動手段の駆動量に対応するパルス信号を出力する検出手段と、前記操作レバーの最大ストローク位置を検出するエッジ検出手段と、前記操作レバーを中立位置に復帰させる自動中立復帰手段と、を備える力覚付与型入力装置における自動中立復帰方法であって、
電源投入時に前記駆動手段が前記操作レバーを一の方向に駆動するステップと、
前記エッジ検出手段が前記操作レバーの第1の最大ストローク位置を検出したとき前記駆動手段が前記操作レバーを他の方向に反転駆動するステップと、
前記エッジ検出手段が前記操作レバーの第2の最大ストローク位置を検出したとき前記操作レバーの前記第1の最大ストローク位置から前記第2の最大ストローク位置までの駆動に対応するパルス信号を前記検出手段が出力した場合に整合性があると判断するステップと、
当該整合性がある場合に前記駆動手段により前記操作レバーを再び前記一の方向に駆動するステップと、
前記検出手段が前記操作レバーの前記第2の最大ストローク位置から中立位置までの駆動に対応するパルス信号を出力したとき前記駆動手段が前記操作レバーの駆動を停止するステップと、を備える力覚付与型入力装置における自動中立復帰方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010116292A JP5410367B2 (ja) | 2010-05-20 | 2010-05-20 | 力覚付与型入力装置及び力覚付与型入力装置における自動中立復帰方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010116292A JP5410367B2 (ja) | 2010-05-20 | 2010-05-20 | 力覚付与型入力装置及び力覚付与型入力装置における自動中立復帰方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011243101A JP2011243101A (ja) | 2011-12-01 |
| JP5410367B2 true JP5410367B2 (ja) | 2014-02-05 |
Family
ID=45409662
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010116292A Active JP5410367B2 (ja) | 2010-05-20 | 2010-05-20 | 力覚付与型入力装置及び力覚付与型入力装置における自動中立復帰方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5410367B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019039546A1 (ja) * | 2017-08-24 | 2019-02-28 | 株式会社Ihi | 遠隔操作装置 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06318120A (ja) * | 1993-05-07 | 1994-11-15 | Hitachi Constr Mach Co Ltd | 電気レバー装置 |
| JPH06316951A (ja) * | 1993-05-07 | 1994-11-15 | Zexel Corp | 操作指令装置 |
| JP2005332039A (ja) * | 2004-05-18 | 2005-12-02 | Alps Electric Co Ltd | 力覚付与型入力装置 |
-
2010
- 2010-05-20 JP JP2010116292A patent/JP5410367B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2011243101A (ja) | 2011-12-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8504203B2 (en) | Manipulator and method of controlling the same | |
| US20050259076A1 (en) | Haptic feedback input device | |
| KR20210077002A (ko) | 차량 조향 시스템을 제어하기 위한 절대각 위치를 산출하기 위한 장치 및 방법 | |
| US9970538B2 (en) | Method for controlling an electromechanical interface device | |
| JP2005332039A (ja) | 力覚付与型入力装置 | |
| US20200376963A1 (en) | Input Device | |
| JP5410367B2 (ja) | 力覚付与型入力装置及び力覚付与型入力装置における自動中立復帰方法 | |
| JP5487822B2 (ja) | 力覚提示型ジョイスティックおよび全方向移動対象物の操作制御方法 | |
| JP5483592B2 (ja) | 試験装置 | |
| EP1450231B1 (en) | Force-applying input device | |
| US10901451B2 (en) | Input device | |
| NL2013827B1 (en) | Automatically adjustable mirror assembly. | |
| EP1610207B1 (en) | Haptic feedback input device | |
| JP2005332156A (ja) | 力覚付与型入力装置 | |
| JP2008108062A (ja) | 力覚付与型入力装置 | |
| WO2019097980A1 (ja) | 把持システムおよび把持方法 | |
| JP3920618B2 (ja) | 力覚付与入力装置 | |
| JP4276034B2 (ja) | 車載用機器 | |
| EP3513915A1 (en) | Automatic control apparatus and automatic control method | |
| JP2008276675A (ja) | 指示装置 | |
| TWI664507B (zh) | 自動控制設備以及自動控制方法 | |
| JP4882990B2 (ja) | ロボット制御装置 | |
| JP2013082357A (ja) | シフト装置 | |
| JP2005118234A (ja) | ステアリング装置 | |
| CN117032388A (zh) | 操纵装置及医疗设备 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20121022 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130605 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130611 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20131022 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20131106 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5410367 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |