以下、本発明の実施の形態について、図面を参照して説明する。
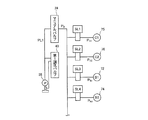
図1は、本発明の実施の形態に係る自動変速機の制御装置を搭載した車両を模式的に示す概略構成図である。図2は、本発明の実施の形態に係る自動変速機の制御装置の構成を示す骨子図である。
本実施の形態においては、本発明に係る自動変速機の制御装置をFF(Front engine Front drive)車両に適用した場合について説明する。
図1に示すように、車両1は、エンジン2と、トルクコンバータ3と、前進クラッチを有する変速機構4と、トルクコンバータ3および変速機構4を油圧で制御するための油圧制御回路9と、動力源としてのエンジン2を制御するためのE−ECU(Electronic Control Unit)11と、油圧制御回路9を制御するためのT−ECU12と、によって構成されている。
エンジン2は、図示しないインジェクタから噴射された燃料と空気との混合気を、シリンダの燃焼室内で燃焼させる内燃機関により構成されている。燃焼によりシリンダ内のピストンが押し下げられて、クランクシャフトが回転させられる。なお、エンジン2の代わりに回転電機などを用いてもよい。
トルクコンバータ3は、エンジン2から変速機構4にトルクを増大してエンジン2の動力を伝達するようになっており、後述するように、エンジン2の出力軸と連結されるポンプインペラー(以下、単にインペラー43という)と、変速機構4の入力軸と連結されるタービンランナー(以下、単にタービン44という)と、ワンウェイクラッチ45によって一方向の回転が阻止されているステータ46とを有している。インペラー43とタービン44とは、流体を介して動力を伝達するようになっている。
さらに、トルクコンバータ3は、車両1の高速走行時において、インペラー43とタービン44とを機械的に直結することによりエンジン2から変速機構4への動力の伝達効率を上げるためのロックアップクラッチ47(図2参照)を有している。
トルクコンバータ3と、変速機構4とは、自動変速機5を構成している。自動変速機5は、所望の変速段を形成することにより、図示しないクランクシャフトの回転数を所望の回転数に変速する。変速機構4の出力ギヤ70から出力される動力は、図示しないディファレンシャルギヤおよびドライブシャフトを介して、図示しない左右の前輪に伝達される。変速機構4については、後で詳細に説明する。
油圧制御回路9は、リニアソレノイドバルブSL1〜SL4を有している。また、油圧制御回路9は、作動油の油温を測定するための油温センサ33を有している。
E−ECU11は、図示しないCPU(Central Processing Unit)、RAM(Random Access Memory)、ROM(Read Only Memory)および入出力インターフェースを有している。E−ECU11は、CPUによって、後述するアクセルセンサやスロットルセンサから入力された信号や、ROMに記憶されたマップなどに基づきエンジン2の回転数を制御するようになっている。
T−ECU12は、図示しないCPU、RAM、ROMおよび入出力インターフェースを有している。T−ECU12のROMには、車速およびスロットル開度と変速機構4の変速段とを対応させたマップが記憶されている。したがって、T−ECU12は、CPUによって、後述する車速センサ25やスロットルセンサ24から入力された信号とROMに記憶されたマップに基づき変速機構4の変速段を決定するようになっている。
T−ECU12は、リニアソレノイドバルブSL1〜SL4の作動状態を変化させ、ライン圧を元圧とする作動油圧により変速機構4の摩擦要素を選択的に係合あるいは解放させるようになっている。これらの摩擦要素の係合および解放の組み合わせによって、変速機構4の入力軸と出力軸との回転数の比が変更され、変速段が構成されるようになっている。
車両1は、さらに、エンジン2の回転数Neを計測するためのエンジン回転数センサ21と、エンジン2の吸入空気量を測定するための吸入空気量センサ22と、エンジン2に吸入される空気の温度を測定するための吸入空気温度センサ23と、スロットルバルブ31の開度を検知するためのスロットルセンサ24と、車速センサ25と、エンジン2の冷却水温を測定するための冷却水温センサ26と、ブレーキセンサ27と、シフトレバー28の操作位置を検出するための操作位置センサ29と、トルクコンバータ3のタービン44の回転数Ntを測定するためのタービン回転数センサ30とを備えている。
エンジン回転数センサ21は、クランクシャフトの回転に基づいて、エンジン2の回転数を計測するようになっている。
スロットルセンサ24は、例えば、スロットルバルブ31のスロットル開度に応じた出力電圧が得られるホール素子により構成されている。スロットルセンサ24は、この出力電圧をスロットルバルブ31のスロットル開度を表す信号としてE−ECU11およびT−ECU12に出力するようになっている。
車速センサ25は、変速機構4の出力軸回転数を表す信号をE−ECU11およびT−ECU12に出力するようになっており、E−ECU11およびT−ECU12は、この信号に基づいて車速を算出するようになっている。
冷却水温センサ26は、例えば、水温に応じて抵抗値が変化するサーミスタにより構成されており、エンジン2の冷却水温に応じて変化した抵抗値に基づく信号をE−ECU11およびT−ECU12に出力するようになっている。
ブレーキセンサ27は、車両1に備えられたブレーキペダル36に対する運転者の踏み込み量に応じた信号をE−ECU11およびT−ECU12に送信するようになっている。T−ECU12は、ブレーキペダル36に対する踏み込み量が所定値より小さいことを表す信号をブレーキセンサ27から取得した場合には、ブレーキOFF信号が入力されたと判断するようになっている。したがって、T−ECU12は、ブレーキ踏力を検出する手段を構成する。
なお、車両1は、ブレーキセンサ27に代えて、運転者がブレーキペダル36を踏み込んだ場合にブレーキON信号を出力し、ブレーキペダル36が踏み込まれていない場合にブレーキOFF信号を出力するストップランプスイッチを備えるようにしてもよい。
操作位置センサ29は、シフトレバー28の位置を検出し、検出結果を表す信号をT−ECU12に送信するようになっている。T−ECU12は、シフトレバー28の位置に対応したレンジの中から最適となる変速機構4の変速段を形成するようになっている。また、操作位置センサ29は、運転者の操作に応じて、運転者が任意の変速段を選択できるマニュアルポジションにシフトレバー28が位置していることを検出するように構成してもよい。
アクセル開度センサ32は、例えばホール素子を用いた電子式のポジションセンサにより構成されており、車両1に搭載されたアクセルペダル34が運転者により操作されると、アクセルペダル34の位置が示すアクセル開度を表す信号をE−ECU11に出力するようになっている。また、T−ECU12は、E−ECU11を介してアクセル開度を表す信号を入力するようになっている。したがって、T−ECU12は、アクセル踏力を検出する手段を構成する。
図2に示すように、トルクコンバータ3は、エンジン2の出力軸41と連結されるインペラー43と、変速機構4の入力軸48と連結されるタービン44と、ワンウェイクラッチ45によって一方向の回転が阻止されているステータ46とを有している。インペラー43とタービン44とは、流体を介して動力を伝達するようになっている。
変速機構4の入力軸48は、トルクコンバータ3のタービン44に接続されている。したがって、変速機構4の入力軸48は、トルクコンバータ3の出力軸としても機能する。変速機構4は、遊星歯車機構の第1セット50と、遊星歯車機構の第2セット60と、出力ギヤ70と、ギヤケース71に固定されたB1ブレーキ72、B2ブレーキ73およびB3ブレーキ74と、C1クラッチ75と、C2クラッチ76と、ワンウェイクラッチF77とによって構成されている。
第1セット50は、シングルピニオン型の遊星歯車機構により構成されている。第1セット50は、サンギヤ51と、ピニオンギヤ52と、リングギヤ53と、キャリア54とを有している。
サンギヤ51は、入力軸48を介してトルクコンバータ3のタービン44に連結されている。ピニオンギヤ52は、キャリア54に回転自在に支持されている。ピニオンギヤ52は、サンギヤ51およびリングギヤ53と係合している。
リングギヤ53は、B3ブレーキ74によりギヤケース71に選択的に固定可能となっている。キャリア54は、B1ブレーキ72によりギヤケース71に選択的に固定可能となっている。
第2セット60は、ラビニヨ型の遊星歯車機構により構成されている。第2セット60は、サンギヤ61と、ショートピニオンギヤ62と、キャリア63、65と、ロングピニオンギヤ64と、サンギヤ66と、リングギヤ67とを有している。
サンギヤ61は、キャリア54に連結されている。ショートピニオンギヤ62は、キャリア63に回転自在に支持されている。ショートピニオンギヤ62は、サンギヤ61およびロングピニオンギヤ64と係合している。キャリア63は、出力ギヤ70に連結されている。
ロングピニオンギヤ64は、キャリア65に回転自在に支持されている。ロングピニオンギヤ64は、ショートピニオンギヤ62、サンギヤ66およびリングギヤ67と係合している。キャリア65は、出力ギヤ70に連結されている。
サンギヤ66は、C1クラッチ75を介して入力軸48に選択的に連結可能となっている。リングギヤ67は、B2ブレーキ73により、ギヤケース71に選択的に固定可能となっており、C2クラッチ76により入力軸48に選択的に連結可能となっている。また、リングギヤ67は、ワンウェイクラッチF77に連結されており、変速段が1段で、かつ駆動時において回転不能となる。
図3は、本発明の実施の形態に係る自動変速機5の作動表である。「○」は係合を表している。「×」は解放を表している。「◎」はエンジンブレーキ時のみの係合を表している。また、「△」は駆動時のみの係合を表している。この作動表に示された組み合わせで、油圧制御回路9(図1参照)に設けられたリニアソレノイドバルブSL1〜SL4および図示しないトランスミッションソレノイドの励磁、非励磁によって各ブレーキおよび各クラッチを作動させることにより、1速〜6速の前進変速段と、後進変速段が形成される。
ここで、B2ブレーキ73と並列にワンウェイクラッチF77が設けられているため、作動表に「◎」で示されているように、変速段の1速(1st)形成時においてエンジン側からの駆動状態(加速時)にはB2ブレーキ73を係合させる必要はない。本実施の形態において、ワンウェイクラッチF77は、変速段が1速を形成している駆動時には、リングギヤ67の回転を防止するようになっている。一方、エンジンブレーキを利かせる場合、ワンウェイクラッチF77は、リングギヤ67の回転を防止しない。
車両1の発進時において形成される1速(1st)の変速段においては、作動表に示されているように、C1クラッチ75が係合される。したがって、C1クラッチ75は、前進クラッチとして機能し、発進時に係合される第1の係合要素を構成している。また、B1ブレーキ72は、1速(1st)の変速段においては解放となる。したがって、B1ブレーキ72は、発進時に解放される第2の係合要素を構成する。
シフトレバー28(図1参照)は、車両1の後方から前方に向かって、ローレンジに対応するLポジション、第2〜第3レンジに対応する2〜3ポジション、ドライブレンジ(以下、単にDレンジという)に対応するDポジション、中立レンジに対応するNポジション、後進レンジに対応するRポジション、駐車レンジに対応するPポジションを取るようになっている。なお、本発明に係る前進レンジとは、中立レンジ、後進レンジ、駐車レンジを除く、少なくとも前進レンジをいい、本実施の形態においては、Dレンジをいう。
シフトレバー28(図1参照)がDレンジに位置する場合には、変速段が1速から6速のうち、いずれかを形成するようになっており、前述したように、T−ECU12が、これらの変速段の中から車速やスロットル開度に基づいて変速段を選択するようになっている。
シフトレバー28(図1参照)は、さらに、自動変速機5(図1参照)の変速段を手動変速モードにおいてシフトするためのマニュアルポジションを表すMポジション、アップシフトを指示するためのプラスポジション(+ポジション)およびダウンシフトを指示するためのマイナスポジション(−ポジション)を取るようにしてもよい。この場合、MポジションはDポジションの横に位置するようにする。シフトレバー28(図1参照)は、Dポジションから横に移動されると、図示しないばねにより、Mポジションに保持されるようになっている。
図4は、本発明の実施の形態に係る油圧制御回路9の概略構成を示す回路図である。オイルポンプ38から圧送された作動油は、リリーフ型の第1調圧バルブ40により調圧され、第1ライン圧PL1となる。オイルポンプ38は、例えばエンジン2によって回転駆動される機械式ポンプにより構成されている。
第1ライン圧PL1を有する作動油は、シフトレバー28(図1参照)に連動させられるマニュアルバルブ39に供給される。シフトレバー28が前進レンジに対応するポジションに位置する場合には、第1ライン圧PL1と等しい前進ポジション圧PDを有する作動油が、マニュアルバルブ39からリニアソレノイドバルブSL1〜SL4へ供給されるようになっている。
リニアソレノイドバルブSL1〜SL4は、C1クラッチ75、C2クラッチ76、B1ブレーキ72、B3ブレーキ74にそれぞれ対応するよう配設されている。T−ECU12は、ソレノイド電流によってこれらのリニアソレノイドバルブSL1〜SL4を制御することにより、油圧PC1、PC2、PB1、PB3を調節し、C1クラッチ75、C2クラッチ76、B1ブレーキ72、B3ブレーキ74の係合および解放を切り替えたり、係合圧を調節したりする。
以下、本発明の実施の形態に係る自動変速機5の制御装置を構成するT−ECU12の特徴的な構成について図1および図2を参照して説明する。
T−ECU12は、車両1の停止中に、ニュートラル制御の作動条件が成立しているか否かを判断する。具体的には、T−ECU12は、操作位置センサ29により検出されたシフトレバー28のポジションがDポジションであること、車速センサ25により検出された車速が0であること、ブレーキペダル36が踏み込まれていることがブレーキセンサ27により検出されたこと、およびアクセルペダル34が踏み込まれていないことがアクセル開度センサ32により検出されたことのいずれの条件も成立した場合において、ニュートラル制御の実行条件が成立していると判断するようになっている。なお、T−ECU12は、これらの条件のほかに、冷却水温センサ26により検出されるエンジン2の冷却水温が所定値以上であること、あるいは油温センサ33により検出される作動油の油温が所定値以上であることなどの条件を加えてもよい。
また、T−ECU12は、ニュートラル制御の実行条件が成立すると、C1クラッチ75を係合状態から半係合状態に移行するとともに、登坂路で車両1が後退することを防止するためにB1ブレーキ72を係合させるヒルホールドモードを実行する。すなわち、T−ECU12は、本発明に係るニュートラル制御手段を構成している。なお、本実施の形態において、C1クラッチ75の半係合状態とは、C1クラッチ75が係合状態と解放状態との間のスリップ状態にあることを意味する。
また、T−ECU12は、ニュートラル制御の実行中において、変速機構4をニュートラル状態から駆動状態に移行する復帰モードを開始する復帰条件が成立したか否かを判断するようになっている。具体的には、T−ECU12は、運転者によるブレーキペダル36の踏み込みが終了することにより、ブレーキセンサ27から取得した信号がブレーキON信号からブレーキOFF信号に切り替わった場合に復帰条件が成立したと判断するようになっている。なお、車両1がストップランプスイッチを備えている場合には、T−ECU12は、ストップランプスイッチから入力される信号がON信号からOFF信号に切り替わった場合に復帰条件が成立したと判断するようになっている。また、T−ECU12は、ストップランプスイッチの代わりに、ブレーキ踏力を油圧に変換するマスターシリンダにおける圧力値に応じてブレーキが解放されたか否かを予測し、この予測に基づいて復帰条件が成立したと判断するようにしてもよい。また、T−ECU12は、ニュートラル制御の実行開始から所定時間経過した場合においても、復帰条件が成立したと判断するようになっている。
また、T−ECU12は、復帰条件が成立したと判断した場合に、通常ブレーキOFF復帰、ブレーキゆっくり離し復帰、ブレーキON復帰、アクセルON復帰のうち、いずれの復帰であるかを判断するようになっている。
ここで、ブレーキゆっくり離し復帰とは、ブレーキセンサ27から出力された信号がブレーキON信号からブレーキOFF信号に切り替わる際におけるブレーキペダル36の踏み込み量の変化速度が予め定められた所定値以下であることを意味する。なお、T−ECU12は、ブレーキセンサ27から入力される信号に代えて、ブレーキ踏力を油圧に変換するマスターシリンダにおける圧力の変化速度を表す信号など、ブレーキ踏力の変化速度を表す信号に基づいてブレーキゆっくり離し復帰であるか否かを判断してもよい。
また、ブレーキON復帰とは、ニュートラル制御の実行開始から所定時間経過したことにより復帰条件が成立したことを意味する。
また、アクセルON復帰とは、ブレーキセンサ27から出力された信号がブレーキON信号からブレーキOFF信号に切り替わった直後にアクセルペダル34が踏み込まれたことがアクセル開度センサ32により検知されたことを意味する。ここで、ブレーキOFF信号に切り替わった直後とは、復帰モードの継続時間よりも十分短い時間のことを意味する。
また、通常ブレーキOFF復帰とは、ブレーキゆっくり離し復帰、ブレーキON復帰、アクセルON復帰以外の復帰を意味する。
したがって、T−ECU12は、ブレーキ踏力およびアクセル踏力に基づいて発進要求の度合いを検出する発進要求検出手段を構成し、発進要求の度合いに応じて通常ブレーキOFF復帰、ブレーキゆっくり離し復帰、ブレーキON復帰、アクセルON復帰のうち、いずれの復帰であるかを判断するようになっている。
T−ECU12は、復帰条件が成立したと判断した場合には、復帰モードを開始し、C1クラッチ75を半係合状態から係合状態に移行する。これにより、タービン回転数センサ30により検出されるタービン回転数Ntが低下を開始する。
また、T−ECU12は、タービン回転数Ntが、予め定められた基準タービン回転数Ntci(1≦i≦4)以下となったか否かを判断するようになっている。
ここで、基準タービン回転数Ntc1、Ntc2、Ntc3およびNtc4は、それぞれ、通常ブレーキOFF復帰、ブレーキゆっくり離し復帰、ブレーキON復帰、アクセルON復帰に対する基準タービン回転数を表しており、これらの基準タービン回転数Ntciは、予めT−ECU12のROMに記憶されている。
また、T−ECU12は、タービン回転数Ntが基準タービン回転数Ntci以下となったと判断した場合には、タイマによる計時を開始するようになっている。そして、T−ECU12は、タービン回転数Ntが基準タービン回転数Ntci以下になったと判断してから所定の待ち時間t(s)i(1≦i≦4)が経過した場合に、B1ブレーキ72を解放し、変速機構4に1速を形成するようになっている。したがって、T−ECU12は、発進要求の度合いに応じて復帰モードにおける第2の係合要素の解放タイミングを設定するニュートラル制御手段を構成する。
ここで、所定の待ち時間t(s)iは、以下のように設定され、予めT−ECU12のROMに記憶されている。
まず、ヒルホールドモードの実行中においては、C1クラッチ75が半係合、B1ブレーキ72が係合となっており、変速機構4に2速の変速段が形成されている。そして、ニュートラル制御を終了させる復帰条件が成立すると、T−ECU12は、C1クラッチ75の係合圧を上昇させるとともに、B1ブレーキ72を係合状態から半係合状態に移行する。
C1クラッチ75の係合圧が上昇を開始すると、タービン回転数Ntが低下を開始する。このとき、B1ブレーキ72が係合しているため、出力ギヤ70に伝達される出力トルクはわずかに上昇するもののほぼ一定となっている。そして、イナーシャ終了時にタービン回転数Ntが0まで落ち込むと、エンジン2の出力トルクがコンバータ3において消費されるため、出力ギヤ70に伝達される出力トルクが落ち込む。一方、ニュートラル制御が終了する際にB1ブレーキ72を解放すると、変速機構4に形成される変速段が2速から1速にシフトする。このシフトダウンにより、エンジン2から出力ギヤ70に伝達される出力トルクは増加する。
したがって、イナーシャ終了に合わせてB1ブレーキ72を解放することにより、イナーシャ終了による出力トルクの落ち込みとダウンシフトによる出力トルクの増加とが打ち消しあい、出力ギヤ70に伝達される出力トルクの変動を抑制し、車両1に振動が発生することを防止できる。
ここで、イナーシャ終了により出力ギヤ70に伝達される出力トルクが落ち込むタイミングは、タービン回転数Ntの減少速度に応じて変化する。
このタービン回転数Ntの減少速度は、通常ブレーキOFF復帰、ブレーキゆっくり離し復帰、ブレーキON復帰およびアクセルON復帰の各復帰状態に応じて変化する。したがって、所定の待ち時間t(s)iは、通常ブレーキOFF復帰、ブレーキゆっくり離し復帰、ブレーキON復帰およびアクセルON復帰の各復帰状態に応じて、予め実験的な測定により求めておく。
基準タービン回転数Ntciは、以下のように設定されている。
まず、アクセルON復帰においては、運転者による車両1に対する迅速な加速要求が発生しているため、通常ブレーキOFF復帰と比較して、B1ブレーキ72の解放を早める必要がある。したがって、Ntc4>Ntc1となる。
また、ブレーキゆっくり離し復帰においては、通常ブレーキOFF復帰と比較して、運転者の車両1に対する加速要求が低くなっている。同様に、ブレーキON復帰においても、ブレーキゆっくり離し復帰と同程度あるいはそれ以上に運転者の車両1に対する加速要求が低くなっている。したがって、これらの復帰の際には、B1ブレーキ72の解放を通常より遅くしても車両1の発進に影響を与えることがない。したがって、Ntc1>Ntc2≧Ntc3となっている。
以上より、基準タービン回転数Ntciは、Ntc4>Ntc1>Ntc2≧Ntc3となるよう設定されている。したがって、T−ECU12は、本発明に係る基準点設定手段を構成し、基準タービン回転数は、本発明に係る基準点を構成する。
そして、T−ECU12は、待ち時間t(s)iが経過すると、B1ブレーキ72に対する作動油をドレーンし、B1ブレーキ72を解放する。ここで、待ち時間t(s)iが経過し、B1ブレーキ72に対する作動油のドレーンを開始する時刻は、本発明に係る解放タイミングを意味する。
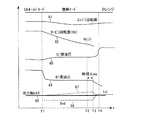
次に、T−ECU12におけるニュートラル制御を図5に示すタイミングチャートを用いて説明する。
T−ECU12は、時刻T1において、ニュートラル制御を終了する復帰条件が成立したと判断し、C1クラッチ75に供給される作動油の油圧を棚圧まで上昇させる(実線83参照)。これによりタービン回転数Ntが低下を開始する(実線82参照)。なお、このときT−ECU12は、B1ブレーキ72に供給される作動油の油圧を、係合状態が維持可能な範囲において低下させておくことにより(実線84参照)、解放タイミングにおいてB1ブレーキ72が迅速に解放されるようにする。
また、T−ECU12は、上述した通常ブレーキOFF復帰、ブレーキゆっくり離し復帰、ブレーキON復帰、アクセルON復帰のいずれかに応じて、基準タービン回転数Ntciを設定する。
次に、T−ECU12は、時刻T2において、タービン回転数Ntが基準タービン回転数Ntciを下回ったと判断したならば、タイマによる計時を開始する。
そして、T−ECU12は、計時の開始から待ち時間t(s)iが経過すると、B1ブレーキ72に供給されている作動油をドレーンする。これにより、時刻T3において、イナーシャ相の終了による出力トルクの落ち込みと、変速機構4において形成されている変速段が2速から1速にダウンシフトされたことによるトルクの増加(破線86参照)とが打ち消しあい、出力ギヤ70に出力されるトルクが一定に保たれ、車両1に振動が発生することを防止できる(実線85参照)。
なお、破線87は、復帰モードの実行中においてB1ブレーキ72が解放された場合における出力トルクの変動を比較のために表したものである。C1クラッチ75の係合圧が高くなるにつれて出力ギヤ70に伝達される出力トルクが増加をしていく。そして、イナーシャ相が終了すると、出力トルクが落ち込み、車両1にショックが発生することとなる。
次に、ニュートラル制御の動作について図6を参照して説明する。なお、以下に説明する処理は、予めT−ECU12のROMに記憶されているプログラムによって実現され、所定の時間間隔でT−ECU12のCPUにより実行される。
まず、T−ECU12は、ニュートラル制御の開始条件が成立しているか否かを判断する(ステップS1)。上述したように、T−ECU12は、シフトレバー28がDポジションであること、車速が0であること、ブレーキペダル36が踏み込まれていること、およびアクセルペダル34が踏み込まれていないことのいずれの条件も成立した場合において、ニュートラル制御の実行条件が成立していると判断する。
T−ECU12は、ニュートラル制御の実行条件が成立していると判断した場合には(ステップS1でYES)、ステップS2に移行する。一方、ニュートラル制御の実行条件が成立していないと判断した場合には(ステップS1でNO)、このステップを繰り返す。
次に、T−ECU12は、ニュートラル制御を実行する(ステップS2)。T−ECU12は、ニュートラル制御において、C1クラッチ75を係合状態から半係合状態に移行させるとともに、B1ブレーキ72を係合させるヒルホールドモードに移行する。
次に、T−ECU12は、ニュートラル制御を終了するためにヒルホールドモードから復帰モードへの移行を開始する復帰条件が成立したか否かを判断する(ステップS3)。
T−ECU12は、ブレーキセンサ27から取得した信号がブレーキON信号からブレーキOFF信号に切り替わった場合、あるいはニュートラル制御の実行開始からの継続時間が所定時間、例えば数分間を超えた場合には、復帰条件が成立したと判断する。
T−ECU12は、復帰条件が成立したと判断した場合には(ステップS3でYES)、ステップS4に移行する。一方、復帰条件が成立していないと判断した場合には(ステップS3でNO)、このステップを繰り返す。
なお、T−ECU12は、復帰条件が成立したと判断した場合には、その際にブレーキセンサ27から入力される信号の微少時間における踏み込み量の変化量に基づいて、ブレーキペダル36の踏み込み量に対する変化速度を算出する。また、アクセルペダル34から入力される信号に基づき、アクセルペダル34が踏み込まれたか否かを判断する。
次に、T−ECU12は、通常ブレーキOFF復帰であるか否かを判断する(ステップS4)。具体的には、T−ECU12は、ブレーキペダル36の踏み込み量の変化速度が所定値を超えており、かつ、アクセルペダル34が踏み込まれていない場合には、通常ブレーキOFF復帰であると判断する。
T−ECU12は、通常ブレーキOFF復帰であると判断した場合には(ステップS4でYES)、ステップS5に移行する。
ステップS5において、T−ECU12は、タービン回転数Ntが基準タービン回転数Ntc1以下となったか否かを判断する。T−ECU12は、タービン回転数Ntが基準タービン回転数Ntc1を上回っている場合には(ステップS5でNO)、ステップS5を繰り返す。一方、タービン回転数Ntが基準タービン回転数Ntc1以下となった場合には(ステップS5でYES)、ステップS6に移行し、タイマによる計時を開始する。
ステップS6において、T−ECU12は、タイマによる計時が待ち時間t(s)1に達したか否かを判断する。T−ECU12は、待ち時間t(s)1に達していないと判断した場合には(ステップS6でNO)、ステップS6を繰り返す。一方、タイマによる計時が待ち時間t(s)1に達したと判断した場合には(ステップS6でYES)、ステップS16に移行する。
一方、T−ECU12は、通常ブレーキOFF復帰でないと判断した場合には(ステップS4でNO)、ステップS7に移行する。
T−ECU12は、ステップS7において、ブレーキゆっくり離し復帰であるか否かを判断する。具体的には、T−ECU12は、ブレーキペダル36の踏み込み量の変化速度が所定値以下であり、かつ、アクセルペダル34が踏み込まれていない場合には、ブレーキゆっくり離し復帰であると判断する。
T−ECU12は、ブレーキゆっくり離し復帰であると判断した場合には(ステップS7でYES)、ステップS8に移行する。一方、ブレーキゆっくり離し復帰でないと判断した場合には(ステップS7でNO)、ステップS10に移行する。
ステップS8において、T−ECU12は、タービン回転数Ntが基準タービン回転数Ntc2以下となったか否かを判断する。T−ECU12は、タービン回転数Ntが基準タービン回転数Ntc2を上回っている場合には(ステップS8でNO)、ステップS8を繰り返す。一方、タービン回転数Ntが基準タービン回転数Ntc2以下となった場合には(ステップS8でYES)、ステップS9に移行し、タイマによる計時を開始する。
ステップS9において、T−ECU12は、タイマによる計時が待ち時間t(s)2に達したか否かを判断する。T−ECU12は、待ち時間t(s)2に達していないと判断した場合には(ステップS9でNO)、ステップS9を繰り返す。一方、タイマによる計時が待ち時間t(s)2に達したと判断した場合には(ステップS9でYES)、ステップS16に移行する。
一方、T−ECU12は、ステップS7においてブレーキゆっくり離し復帰でないと判断し、ステップS10に移行した場合には、ブレーキON復帰であるか否かを判断する。具体的には、T−ECU12は、ブレーキセンサ27からブレーキON信号が入力されている場合には、ブレーキON復帰であると判断する。
T−ECU12は、ブレーキON復帰であると判断した場合には(ステップS10でYES)、ステップS11に移行する。一方、ブレーキON復帰でないと判断した場合には(ステップS10でNO)、ステップS13に移行する。
ステップS11において、T−ECU12は、タービン回転数Ntが基準タービン回転数Ntc3以下となったか否かを判断する。T−ECU12は、タービン回転数Ntが基準タービン回転数Ntc3を上回っている場合には(ステップS11でNO)、ステップS11を繰り返す。一方、タービン回転数Ntが基準タービン回転数Ntc3以下となった場合には(ステップS11でYES)、ステップS12に移行し、タイマによる計時を開始する。
ステップS12において、T−ECU12は、タイマによる計時が待ち時間t(s)3に達したか否かを判断する。T−ECU12は、待ち時間t(s)3に達していないと判断した場合には(ステップS12でNO)、ステップS12を繰り返す。一方、タイマによる計時が待ち時間t(s)3に達したと判断した場合には(ステップS12でYES)、ステップS16に移行する。
一方、T−ECU12は、ステップS10においてブレーキON復帰でないと判断し、ステップS13に移行した場合には、アクセルON復帰であるか否かを判断する。具体的には、T−ECU12は、ブレーキセンサ27から出力された信号がブレーキON信号からブレーキOFF信号に切り替わった直後にアクセルペダル34が踏み込まれたと判断した場合には(ステップS13でYES)、ステップS14に移行する。一方、アクセルON復帰でないと判断した場合には(ステップS13でNO)、ステップS4に移行する。
ステップS14において、T−ECU12は、タービン回転数Ntが基準タービン回転数Ntc4以下となったか否かを判断する。T−ECU12は、タービン回転数Ntが基準タービン回転数Ntc4を上回っている場合には(ステップS14でNO)、ステップS14を繰り返す。一方、タービン回転数Ntが基準タービン回転数Ntc4以下となった場合には(ステップS14でYES)、ステップS15に移行し、タイマによる計時を開始する。
ステップS15において、T−ECU12は、タイマによる計時が待ち時間t(s)4に達したか否かを判断する。T−ECU12は、待ち時間t(s)4に達していないと判断した場合には(ステップS15でNO)、ステップS15を繰り返す。一方、タイマによる計時が待ち時間t(s)4に達したと判断した場合には(ステップS15でYES)、ステップS16に移行する。
T−ECU12は、ステップS16において、B1ブレーキ72に供給されている作動油をドレーンし、B1ブレーキ72を解放する。
以上のように、本発明の実施の形態に係るT−ECU12は、運転者の車両1に対する発進要求の度合いに応じてB1ブレーキ72の解放タイミングを変化させることができるので、発進要求の度合いに応じて復帰モードを迅速に終了することを優先させたり、車両1に発生する振動の発生防止を優先させることができる。したがって、車両1の発進性の向上とドライバビリティの向上とを両立することができる。
また、運転者の発進要求の度合いに応じて基準タービン回転数Ntciを異ならせ解放タイミングを調節することができる。したがって、B1ブレーキ72の解放タイミングに対する正確性を向上させ、車両1の発進性の向上およびドライバビリティの向上のいずれをも実現できる。
また、運転者は発進要求に応じてブレーキペダル36およびアクセルペダル34の踏み込みを変化させるので、ブレーキ踏力およびアクセル踏力に基づいて運転者の車両に対する発進要求の度合いを精度よく算出することが可能となる。
また、運転者により車両1の迅速な発進が要求され、ブレーキ踏力の減少が速い場合にはB1ブレーキ72の解放タイミングが早まるよう基準点を設定することにより、復帰モードを短縮することが可能となる。また、車両1の迅速な発進が要求されていない場合には、B1ブレーキ72の解放タイミングを遅くすることによりドライバビリティを向上することができる。
また、運転者により車両1の迅速な発進が要求され、アクセルペダル34の踏み込みが早く行われた場合には、B1ブレーキ72の解放タイミングが早まるよう基準タービン回転数Ntciを設定することにより、復帰モードを短縮することが可能となる。また、車両1の迅速な発進が要求されていない場合には、B1ブレーキ72の解放タイミングを遅くすることによりドライバビリティを向上することができる。
なお、以上の説明においては、タービン回転数Ntが基準タービン回転数Ntciに低下した場合には、タイマによる計時を開始する場合について説明した。しかしながら、変速進行度に応じてタイマによる計時を開始するようにしてもよい。
この場合、T−ECU12は、ヒルホールドモードの実行中におけるタービン回転数Ntholdを取得する。
また、T−ECU12は、復帰モードにおけるタービン回転数Ntを取得し、以下の式(1)から変速進行度αを算出する。
α=(Nthold−Nt)/Nthold (1)
また、T−ECU12は、上述した通常ブレーキOFF復帰、ブレーキゆっくり離し復帰、ブレーキON復帰、アクセルON復帰においてタイマにより計時を開始する基準変速進行度αcを予めROMに記憶しておく。
そして、T−ECU12は、式(1)に基づき、変速進行度αが基準変速進行度αcに達したと判断した場合には、タイマによる計時を開始し、上述した待ち時間が経過するとB1ブレーキ72を解放するようにする。
また、以上の説明にいては、待ち時間t(s)iが経過した場合にB1ブレーキ72に対する作動油をドレーンする場合について説明した。しかしながら、B1ブレーキ72に対する作動油をドレーンする速度を調節するようにしてもよい。これにより、ニュートラル制御の復帰にかかる時間にばらつきが生じやすい場合には、ドレーンする速度を遅くすることにより、車両1に振動が発生することを抑制でき、ばらつきが生じにくい場合には、ドレーンする速度を速くすることにより、迅速に復帰モードを終了することが可能となる。
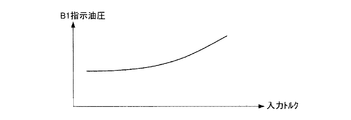
また、アクセルON復帰時においては、復帰モード中においてエンジン2からの入力トルクが増加するため、B1ブレーキ72に対する指示油圧を上昇させることにより、復帰モードにおけるB1ブレーキ72の係合状態を維持するようにしてもよい。
この場合、図7に示すように、入力トルクに応じてB1ブレーキ72に対する指示油圧を高くするようにする。なお、入力トルクとB1ブレーキ72に対する指示油圧との関係は、比例関数、2次関数など、入力トルクが高くなるほどB1ブレーキ72に対する指示油圧が高くなるよう設定されていればよい。
また、以上の説明においては、T−ECU12が、ニュートラル制御を終了する復帰条件が成立した際に、通常ブレーキOFF復帰、ブレーキゆっくり離し復帰、ブレーキON復帰およびアクセルON復帰のうちいずれの復帰であるかを判断する場合について説明した。しかしながら、T−ECU12は、ブレーキペダル36の踏み込み量の変化速度およびアクセルペダル34の踏み込み量の変化速度に応じて、基準タービン回転数Ntciの設定をより細分化してもよい。この場合、T−ECU12は、それぞれの踏み込み量の変化速度が速いほど基準タービン回転数Ntciを高く設定するようにする。また、復帰モード開始時あるいは復帰モード中におけるアクセルペダル34の踏み込み開始が早いほど、基準タービン回転数Ntciを高く設定するようにしてもよい。
また、以上の説明においては、T−ECU12が、通常ブレーキOFF復帰、ブレーキゆっくり離し復帰、ブレーキON復帰およびアクセルON復帰のそれぞれの復帰状態に応じて待ち時間t(s)iを設定する場合について説明した。しかしながら、基準タービン回転数Ntciの設定によりB1ブレーキ72の解放タイミングをトルク変動が生じないタイミングに一致させることが可能な場合には、T−ECU12は、復帰状態にかかわらず待ち時間を一律に設定してもよい。
また、以上の説明においては、T−ECU12は、上述したステップS3において復帰条件が成立したと判断した場合に、ブレーキペダル36の踏み込み量に対する変化速度の算出とアクセルペダル34が踏み込まれたか否か判断を実行し、この実行結果に基づいて、通常ブレーキOFF復帰、ブレーキゆっくり離し復帰、ブレーキON復帰、アクセルON復帰のうち、いずれの復帰であるかを上述したステップS4、S7、S10およびS13においてそれぞれ判断する場合について説明した。しかしながら、T−ECU12は、通常ブレーキOFF復帰、ブレーキゆっくり離し復帰あるいはブレーキON復帰と判断した後において、復帰モードが終了する前にアクセルペダル34の踏み込みが検出された場合には、一旦設定された基準タービン回転数NtciをアクセルON復帰の基準タービン回転数Ntc4に設定し直してもよい。これにより、迅速な車両1の発進要求の発生に対応することが可能となる。
また、以上の説明においては、T−ECU12が本発明に係るニュートラル制御を実行する場合について説明したが、これに限定されず、E−ECU11など、車両1に搭載されている他のECUにより実行されてもよい。また、複数のECUが協働して本発明に係るニュートラル制御を実行するようにしてもよい。
また、以上の説明においては、制御装置が前輪駆動の車両1に搭載される場合について説明したが、これに限定されず、制御装置が4輪駆動や後輪駆動などの車両に搭載されるようにしてもよい。
以上のように、本発明に係る車両の制御装置は、ニュートラル制御の終了時において、車両の発進性の向上とドライバビリティの向上とを両立することができるという効果を奏するものであり、ニュートラル制御を実行する自動変速機の制御装置に有用である。