ところで、車両によっては、前席(即ち運転席若しくは助手席)への乗降を行うためのスイングドア(隣接開閉部材)がスライドドアの前方に配置され、乗降口におけるスライドドアの前端部と対向する部位が当該スイングドアの後端部で構成されているものがある。このような車両では、スライドドアによって乗降口が締め切られる直前等にスイングドアの閉作動が行われると、導電性のスイングドアとスライドドアの前端部に配置されたセンサ電極との距離が突然短くなるため、センサ電極を用いて検出される静電容量が大きく変化する。すると、この静電容量の変化によって、スイングドアが異物として誤検知されてしまい、スライドドアが誤作動される虞があった。
本発明は、こうした実情に鑑みてなされたものであって、その目的は、隣接開閉部材の閉作動によって異物が誤検知されることを抑制することができる開閉部材制御装置、開閉装置及び開閉装置の制御方法を提供することにある。
上記課題を解決するため、請求項1に記載の発明は、被開閉体に設けられた開口部を開閉する開閉部材の閉作動時の前方側の閉側端部に設けられたセンサ電極と前記センサ電極に近接する物体との間の静電容量に応じた出力をする検出センサと、前記閉側端部に近接する異物の有無を判定するための検出しきい値と前記検出センサの出力値に基づく比較値とを比較しその比較結果に基づいて前記閉側端部に近接する前記異物の有無を判定する判定手段と、前記開閉部材に駆動力を付与する開閉駆動手段を制御する駆動制御手段と、を備え、前記開閉部材の閉作動時に前記判定手段の出力に応じて前記駆動制御手段が前記開閉部材の作動を制御する開閉部材制御装置であって、前記開閉部材と隣り合い前記開口部における前記閉側端部と対向する部位を構成する隣接開閉部材の開閉状態に応じて前記検出しきい値を補正するしきい値算出手段を備えたことをその要旨としている。
同構成によれば、しきい値算出手段は、隣接開閉部材の開閉状態に応じて検出しきい値を補正する。従って、隣接開閉部材の閉作動が行われる可能性のあるとき、即ち隣接開閉部材が開いているときに開閉部材の閉作動が行われる場合には、しきい値算出手段が、検出しきい値を、隣接開閉部材の閉作動による検出センサの出力値の変化を考慮した値に補正することにより、隣接開閉部材の閉作動による異物の誤検知を抑制可能となる。その結果、開閉部材の誤作動を抑制可能となる。
請求項2に記載の発明は、請求項1に記載の開閉部材制御装置において、前記検出センサの前記出力値に基づいて前記隣接開閉部材の開閉状態を検知する開閉状態検知手段を備えたことをその要旨としている。
同構成によれば、隣接開閉部材の開閉状態は、検出センサの出力値に基づいて検知されるため、別途、隣接開閉部材の開閉状態を検知するための構成を備えなくてもよい。従って、部品点数の増大が抑制されて製造コストの増大が抑制されるとともに、開閉部材制御装置が複雑化されることを抑制することができる。
請求項3に記載の発明は、請求項1又は請求項2に記載の開閉部材制御装置において、前記しきい値算出手段は、前記隣接開閉部材が開いているときには、前記隣接開閉部材が閉まっているときよりも大きくなるように前記検出しきい値を補正することをその要旨としている。
同構成によれば、隣接開閉部材が開いているときには、隣接開閉部材が閉まっているときよりも大きくなるように検出しきい値が補正される。開閉部材の閉作動中に隣接開閉部材の閉作動が行われると、隣接開閉部材とセンサ電極との間の距離が突然短くなり、この隣接開閉部材の閉作動に起因して検出センサの出力値が大きく変化することがある。そこで、隣接開閉部材の閉作動が行われる可能性のあるとき、即ち隣接開閉部材が開いているときには、隣接開閉部材が閉まっているときよりも大きくなるように検出しきい値が補正されることにより、隣接開閉部材の閉作動に起因した異物の誤検知を抑制することができる。その結果、開閉部材の誤作動を抑制することができる。
請求項4に記載の発明は、被開閉体に設けられた開口部を開閉する開閉部材の閉作動時の前方側の閉側端部に設けられたセンサ電極と前記センサ電極に近接する物体との間の静電容量に応じた出力をする検出センサと、前記閉側端部に近接する異物の有無を判定するための検出しきい値と前記検出センサの出力値に基づく比較値とを比較しその比較結果に基づいて前記閉側端部に近接する前記異物の有無を判定する判定手段と、前記開閉部材に駆動力を付与する開閉駆動手段を制御する駆動制御手段と、を備え、前記開閉部材の閉作動時に前記判定手段の出力に応じて前記駆動制御手段が前記開閉部材の作動を制御する開閉部材制御装置であって、前記判定手段は、前記開閉部材と隣り合い前記開口部における前記閉側端部と対向する部位を構成する隣接開閉部材が開いているときには、前記閉側端部に近接する前記異物の有無の判定を行わないことをその要旨としている。
同構成によれば、隣接開閉部材は、開閉部材の閉側端部と隣り合って設けられ開口部における閉側端部と対向する部位を構成するものであるため、隣接開閉部材が開いているときに開閉部材の閉作動が行われる場合には、隣接開閉部材と開閉部材との間に異物が挟み込まれる可能性が低い。そして、隣接開閉部材が開いているときに開閉部材の閉作動が行われる場合には、判定手段において閉側端部に近接する異物の有無の判定を行わないことにより、隣接開閉部材が閉作動されたことに起因して異物が誤検知されることを防止することができる。従って、開閉部材の誤作動を抑制することができる。
請求項5に記載の発明は、請求項1乃至請求項3の何れか1項に記載の開閉部材制御装置において、前記開閉部材の移動に伴ってパルス状の位置検出信号を出力する位置検出装置と、前記位置検出信号のパルス数をカウントする位置認識手段と、前記隣接開閉部材が閉まっている状態で前記開閉部材が前記開口部を開放する全開位置から前記開口部を閉鎖する全閉位置まで閉作動されたときの前記検出センサの前記出力値を前記位置検出信号のパルス数に対応させて配列状に記憶する特性記憶装置と、前記位置検出信号のパルス数に対応して前記出力値が前記特性記憶装置に記憶された状態で前記開閉部材の閉作動が行われると、前記位置検出信号の最新のパルス数から過去Mパルス分に対応する前記出力値を配列状に記憶するバッファ装置と、前記特性記憶装置に記憶された前記位置検出信号のパルス数の中から最新の前記位置検出信号のパルス数を含む一定の範囲内の全てのパルス数を順に基準位置に設定し、各前記基準位置から過去Mパルス分に対応して前記特性記憶装置に記憶された前記出力値から算出した前記出力値の変化量と、前記バッファ装置に記憶された前記出力値から算出した前記出力値の変化量とをそれぞれ比較する比較手段と、前記比較手段の比較結果に基づいて、前記特性記憶装置の記憶内容に対して前記バッファ装置の記憶内容が類似する部位がある場合には、前記バッファ装置の記憶内容が前記特性記憶装置の記憶内容に類似するときの前記基準位置を抽出する抽出手段と、前記バッファ装置に記憶された最新の前記出力値と、当該最新の前記出力値が記憶されたときの前記位置検出信号のパルス数からNパルス前に前記バッファ装置に記憶された前記出力値との差分を算出して前記比較値とする変化量算出手段と、を備え、前記しきい値算出手段は、前記抽出手段の抽出結果に応じて前記特性記憶装置の記憶内容を参照して前記検出しきい値を算出することをその要旨としている。
同構成によれば、比較手段は、特性記憶装置に記憶された位置検出信号のパルス数のうち最新の位置検出信号のパルス数を含む一定の範囲内の全てのパルス数を順に基準位置に設定し、各基準位置から過去Mパルス分に対応して特性記憶装置に記憶された出力値から算出した当該出力値の変化量と、バッファ装置に記憶された出力値から算出した当該出力値の変化量とを比較する。そのため、閉側端部に雪が付着した場合や、開閉部材に生じた機械的ながたつきの影響によって、位置検出信号のパルス数と検出センサの出力値との関係が、特性記憶装置に記憶された位置検出信号のパルス数と出力値との関係とはずれている場合であっても、しきい値算出手段は、抽出手段の抽出結果に応じて特性記憶装置の記憶内容を参照することにより、特性記憶装置の適切な記憶内容を参照して検出しきい値を算出することができる。
請求項6に記載の発明は、請求項5に記載の開閉部材制御装置において、前記しきい値算出手段は、前記隣接開閉部材の開閉状態を検知する開閉状態検知手段を含むとともに、前記隣接開閉部材が閉まっているときの前記検出センサの前記出力値に基づいて設定された前記検出しきい値を算出するための閉状態しきい値を有し、前記抽出手段にて抽出された前記基準位置が少なくとも1つある場合に前記隣接開閉部材が閉まっていると判定し、前記抽出手段にて抽出された全ての前記基準位置に関して、前記基準位置に対応して前記特性記憶装置に記憶された前記出力値と前記基準位置からNパルス分前のパルス数に対応して前記特性記憶装置に記憶された前記出力値との差分を算出して、その差分の最大値を閉状態しきい値補正量とし、前記閉状態しきい値に前記閉状態しきい値補正量を加算して前記検出しきい値を算出することをその要旨としている。
同構成によれば、特性記憶装置の記憶内容に対してバッファ装置の記憶内容が類似する位置を示す全ての基準位置(即ち抽出手段にて抽出された全ての基準位置)に関して、基準位置に対応して特性記憶装置に記憶された出力値と基準位置からNパルス分前のパルス数に対応して特性記憶装置に記憶された出力値との差分を算出し、その算出結果の最大値を閉状態しきい値補正量としている。従って、開閉部材が、隣接開閉部材に近接することにより検出センサの出力値が増大する全閉位置に近づくほど、閉状態しきい値補正量は大きな値になる。よって、閉状態しきい値補正量を閉状態しきい値に加算して算出される検出しきい値は、開閉部材が隣接開閉部材に近接したことに起因する検出センサの出力値の増大を許容する値となり、異物の誤検知が抑制される。
請求項7に記載の発明は、請求項5又は請求項6に記載の開閉部材制御装置において、前記しきい値算出手段は、前記隣接開閉部材の開閉状態を検知する開閉状態検知手段を含むとともに、前記隣接開閉部材の閉作動が行われるときの前記検出センサの前記出力値に基づいて設定された前記検出しきい値を算出するための開状態しきい値を有し、前記抽出手段にて抽出された前記基準位置が1つも無い場合に前記隣接開閉部材が開いていると判定し、前記隣接開閉部材が開いているときには、前記抽出手段において設定した全ての前記基準位置に関して、前記特性記憶装置に記憶された前記出力値と前記基準位置からNパルス分前のパルス数に対応して前記特性記憶装置に記憶された前記出力値との差分を算出して、その差分の最大値を開状態しきい値補正量とし、前記開状態しきい値に前記開状態しきい値補正量を加算して前記検出しきい値を算出することをその要旨としている。
同構成によれば、抽出手段において基準位置が1つも抽出されていない場合には、バッファ装置の記憶内容が特性記憶装置の記憶内容に対して類似する部位が無いということであるため、隣接開閉部材が開いている可能性がある。そして、しきい値算出手段は、抽出手段において基準位置が1つも抽出されていない場合には、隣接開閉部材の閉作動が行われるときの検出センサの出力値に基づいて設定された開状態しきい値に、算出した開状態しきい値補正量を加算して検出しきい値を算出するため、判定手段においては、隣接開閉部材の閉作動に起因した異物の誤検知を抑制できる適切な検出しきい値を用いて、閉側端部に近接する異物の有無の判定を行うことができる。
請求項8に記載の発明は、被開閉体に設けられた開口部を開閉する開閉部材と、前記開閉部材に駆動力を付与する開閉駆動手段と、前記開閉駆動手段を制御する駆動制御手段と、前記開閉部材の閉作動時の前方側の閉側端部に設けられたセンサ電極と前記センサ電極に近接する物体との間の静電容量に応じた出力をする検出センサと、前記閉側端部に近接する異物の有無を判定するための検出しきい値と前記検出センサの出力値に基づく比較値とを比較しその比較結果に基づいて前記閉側端部に近接する前記異物の有無を判定する判定手段と、を備え、前記開閉部材の閉作動時に前記判定手段の出力に応じて前記駆動制御手段が前記開閉部材の作動を制御する開閉装置であって、前記開閉部材と隣り合い前記開口部における前記閉側端部と対向する部位を構成する隣接開閉部材の開閉状態に応じて前記検出しきい値を補正するしきい値算出手段を備えたことをその要旨としている。
同構成によれば、しきい値算出手段は、隣接開閉部材の開閉状態に応じて検出しきい値を補正する。従って、隣接開閉部材の閉作動が行われる可能性のあるとき、即ち隣接開閉部材が開いているときに開閉部材の閉作動が行われる場合には、しきい値算出手段が、検出しきい値を、隣接開閉部材の閉作動による検出センサの出力値の変化を考慮した値に補正することにより、隣接開閉部材の閉作動による異物の誤検知を抑制可能となる。その結果、開閉部材の誤作動を抑制可能となる。
請求項9に記載の発明は、請求項8に記載の開閉装置において、前記検出センサの前記出力値に基づいて前記隣接開閉部材の開閉状態を検知する開閉状態検知手段を備えたことをその要旨としている。
同構成によれば、隣接開閉部材の開閉状態は、検出センサの出力値に基づいて検知されるため、別途、隣接開閉部材の開閉状態を検知するための構成を備えなくてもよい。従って、部品点数の増大が抑制されて製造コストの増大が抑制されるとともに、開閉装置が複雑化されることを抑制することができる。
請求項10に記載の発明は、請求項8又は請求項9に記載の開閉装置において、前記しきい値算出手段は、前記隣接開閉部材が開いているときには、前記隣接開閉部材が閉まっているときよりも大きくなるように前記検出しきい値を補正することをその要旨としている。
同構成によれば、隣接開閉部材が開いているときには、隣接開閉部材が閉まっているときよりも大きくなるように検出しきい値が補正される。開閉部材の閉作動中に隣接開閉部材の閉作動が行われると、隣接開閉部材とセンサ電極との間の距離が突然短くなり、この隣接開閉部材の閉作動に起因して検出センサの出力値が大きく変化することがある。そこで、隣接開閉部材の閉作動が行われる可能性のあるとき、即ち隣接開閉部材が開いているときには、隣接開閉部材が閉まっているときよりも大きくなるように検出しきい値が補正されることにより、隣接開閉部材の閉作動に起因した異物の誤検知を抑制することができる。その結果、開閉部材の誤作動を抑制することができる。
請求項11に記載の発明は、被開閉体に設けられた開口部を開閉する開閉部材と、前記開閉部材に駆動力を付与する開閉駆動手段と、前記開閉駆動手段を制御する駆動制御手段と、前記開閉部材の閉作動時の前方側の閉側端部に設けられたセンサ電極と前記センサ電極に近接する物体との間の静電容量に応じた出力をする検出センサと、前記閉側端部に近接する異物の有無を判定するための検出しきい値と前記検出センサの出力値に基づく比較値とを比較しその比較結果に基づいて前記閉側端部に近接する前記異物の有無を判定する判定手段と、を備え、前記開閉部材の閉作動時に前記判定手段の出力に応じて前記駆動制御手段が前記開閉部材の作動を制御する開閉装置であって、前記判定手段は、前記開閉部材と隣り合い前記開口部における前記閉側端部と対向する部位を構成する隣接開閉部材が開いているときには、前記閉側端部に近接する前記異物の有無の判定を行わないことをその要旨としている。
同構成によれば、隣接開閉部材は、開閉部材の閉側端部と隣り合って設けられ開口部における閉側端部と対向する部位を構成するものであるため、隣接開閉部材が開いているときに開閉部材の閉作動が行われる場合には、隣接開閉部材と開閉部材との間に異物が挟み込まれる可能性が低い。そして、隣接開閉部材が開いているときに開閉部材の閉作動が行われる場合には、判定手段において閉側端部に近接する異物の有無の判定を行わないことにより、隣接開閉部材が閉作動されたことに起因して異物が誤検知されることを防止することができる。従って、開閉部材の誤作動を抑制することができる。
請求項12に記載の発明は、請求項8乃至請求項10の何れか1項に記載の開閉装置において、前記開閉部材の移動に伴ってパルス状の位置検出信号を出力する位置検出装置と、前記位置検出信号のパルス数をカウントする位置認識手段と、前記隣接開閉部材が閉まっている状態で前記開閉部材が前記開口部を開放する全開位置から前記開口部を閉鎖する全閉位置まで閉作動されたときの前記検出センサの前記出力値を前記位置検出信号のパルス数に対応させて配列状に記憶する特性記憶装置と、前記位置検出信号のパルス数に対応して前記出力値が前記特性記憶装置に記憶された状態で前記開閉部材の閉作動が行われると、前記位置検出信号の最新のパルス数から過去Mパルス分に対応する前記出力値を配列状に記憶するバッファ装置と、前記特性記憶装置に記憶された前記位置検出信号のパルス数のうち最新の前記位置検出信号のパルス数を含む一定の範囲内の全てのパルス数を順に基準位置に設定し、各前記基準位置から過去Mパルス分に対応して前記特性記憶装置に記憶された前記出力値から算出した前記出力値の変化量と、前記バッファ装置に記憶された前記出力値から算出した前記出力値の変化量とをそれぞれ比較する比較手段と、前記比較手段の比較結果に基づいて、前記特性記憶装置の記憶内容に対して前記バッファ装置の記憶内容が類似する部位がある場合には、前記バッファ装置の記憶内容が前記特性記憶装置の記憶内容に類似するときの前記基準位置を抽出する抽出手段と、前記バッファ装置に記憶された最新の前記出力値と、当該最新の前記出力値が記憶されたときの前記位置検出信号のパルス数からNパルス前に前記バッファ装置に記憶された前記出力値との差分を算出して前記比較値とする変化量算出手段と、を備え、前記しきい値算出手段は、前記抽出手段の抽出結果に応じて前記特性記憶装置の記憶内容を参照して前記検出しきい値を算出することをその要旨としている。
同構成によれば、比較手段は、特性記憶装置に記憶された位置検出信号のパルス数のうち最新の位置検出信号のパルス数を含む一定の範囲内の全てのパルス数を順に基準位置に設定し、各基準位置から過去Mパルス分に対応して特性記憶装置に記憶された出力値から算出した当該出力値の変化量と、バッファ装置に記憶された出力値から算出した当該出力値の変化量とを比較する。そのため、閉側端部に雪が付着した場合や、開閉部材に生じた機械的ながたつきの影響によって、位置検出信号のパルス数と検出センサの出力値との関係が、特性記憶装置に記憶された位置検出信号のパルス数と出力値との関係とはずれている場合であっても、しきい値算出手段は、抽出手段の抽出結果に応じて特性記憶装置の記憶内容を参照することにより、特性記憶装置の適切な記憶内容を参照して検出しきい値を算出することができる。
請求項13に記載の発明は、請求項12に記載の開閉装置において、前記しきい値算出手段は、前記隣接開閉部材の開閉状態を検知する開閉状態検知手段を含むとともに、前記隣接開閉部材が閉まっているときの前記検出センサの前記出力値に基づいて設定された前記検出しきい値を算出するための閉状態しきい値を有し、前記抽出手段にて抽出された前記基準位置が少なくとも1つある場合に前記隣接開閉部材が閉まっていると判定し、前記抽出手段にて抽出された全ての前記基準位置に関して、前記基準位置に対応して前記特性記憶装置に記憶された前記出力値と前記基準位置からNパルス分前のパルス数に対応して前記特性記憶装置に記憶された前記出力値との差分を算出して、その差分の最大値を閉状態しきい値補正量とし、前記閉状態しきい値に前記閉状態しきい値補正量を加算して前記検出しきい値を算出することをその要旨としている。
同構成によれば、特性記憶装置の記憶内容に対してバッファ装置の記憶内容が類似する位置を示す全ての基準位置(即ち抽出手段にて抽出された全ての基準位置)に関して、基準位置に対応して特性記憶装置に記憶された出力値と基準位置からNパルス分前のパルス数に対応して特性記憶装置に記憶された出力値との差分を算出し、その算出結果の最大値を閉状態しきい値補正量としている。従って、開閉部材が、隣接開閉部材に近接することにより検出センサの出力値が増大する全閉位置に近づくほど、閉状態しきい値補正量は大きな値になる。よって、閉状態しきい値補正量を閉状態しきい値に加算して算出される検出しきい値は、開閉部材が隣接開閉部材に近接したことに起因する検出センサの出力値の増大を許容する値となり、異物の誤検知が抑制される。
請求項14に記載の発明は、請求項12又は請求項13に記載の開閉装置において、前記しきい値算出手段は、前記隣接開閉部材の開閉状態を検知する開閉状態検知手段を含むとともに、前記隣接開閉部材の閉作動が行われるときの前記検出センサの前記出力値に基づいて設定された前記検出しきい値を算出するための開状態しきい値を有し、前記抽出手段にて抽出された前記基準位置が1つも無い場合に前記隣接開閉部材が開いていると判定し、前記隣接開閉部材が開いているときには、前記抽出手段において設定した全ての前記基準位置に関して、前記特性記憶装置に記憶された前記出力値と前記基準位置からNパルス分前のパルス数に対応して前記特性記憶装置に記憶された前記出力値との差分を算出して、その差分の最大値を開状態しきい値補正量とし、前記開状態しきい値に前記開状態しきい値補正量を加算して前記検出しきい値を算出することをその要旨としている。
同構成によれば、抽出手段において基準位置が1つも抽出されていない場合には、バッファ装置の記憶内容が特性記憶装置の記憶内容に対して類似する部位が無いということであるため、隣接開閉部材が開いている可能性がある。そして、しきい値算出手段は、抽出手段において基準位置が1つも抽出されていない場合には、隣接開閉部材の閉作動が行われるときの検出センサの出力値に基づいて設定された開状態しきい値に、算出した開状態しきい値補正量を加算して検出しきい値を算出するため、判定手段においては、隣接開閉部材の閉作動に起因した異物の誤検知を抑制できる適切な検出しきい値を用いて、閉側端部に近接する異物の有無の判定を行うことができる。
請求項15に記載の発明は、被開閉体に設けられた開口部を開閉する開閉部材の閉作動時の前方側の閉側端部に設けられたセンサ電極と前記センサ電極に近接する物体との間の静電容量に応じた出力をする検出センサの出力値に基づく比較値と、前記閉側端部に近接する異物の有無を判定するための検出しきい値とを比較し、その比較結果に基づいて前記閉側端部に近接する前記異物の有無を判定し、その判定結果に基づいて前記開閉部材の作動を制御する開閉装置の制御方法であって、前記開閉部材と隣り合い前記開口部における前記閉側端部と対向する部位を構成する隣接開閉部材の開閉状態に応じて前記検出しきい値を補正することをその要旨としている。
同方法によれば、隣接開閉部材の閉作動が行われる可能性のあるとき、即ち隣接開閉部材が開いているときに開閉部材の閉作動が行われる場合に、検出しきい値を、隣接開閉部材の閉作動による検出センサの出力値の変化を考慮した値に補正することにより、隣接開閉部材の閉作動による異物の誤検知を抑制可能となる。その結果、開閉部材の誤作動を抑制可能となる。
請求項16に記載の発明は、請求項15に記載の開閉装置の制御方法において、前記検出センサの前記出力値に基づいて前記隣接開閉部材の開閉状態を検知することをその要旨としている。
同方法によれば、隣接開閉部材の開閉状態は、検出センサの出力値に基づいて検知されるため、別途、隣接開閉部材の開閉状態を検知するための構成を用いなくてもよい。従って、開閉装置の部品点数の増大が抑制されて製造コストの増大が抑制されるとともに、開閉装置が複雑化が抑制される。
請求項17に記載の発明は、請求項15又は請求項16に記載の開閉装置の制御方法において、前記隣接開閉部材が開いているときには、前記隣接開閉部材が閉まっているときよりも大きくなるように前記検出しきい値を補正することをその要旨としている。
同方法によれば、隣接開閉部材が開いているときには、隣接開閉部材が閉まっているときよりも大きくなるように検出しきい値が補正される。開閉部材の閉作動中に隣接開閉部材の閉作動が行われると、隣接開閉部材とセンサ電極との間の距離が突然短くなり、この隣接開閉部材の閉作動に起因して検出センサの出力値が大きく変化することがある。そこで、隣接開閉部材の閉作動が行われる可能性のあるとき、即ち隣接開閉部材が開いているときには、隣接開閉部材が閉まっているときよりも大きくなるように検出しきい値が補正されることにより、隣接開閉部材の閉作動に起因した異物の誤検知を抑制することができる。その結果、開閉部材の誤作動を抑制することができる。
請求項18に記載の発明は、被開閉体に設けられた開口部を開閉する開閉部材の閉作動時の前方側の閉側端部に設けられたセンサ電極と前記センサ電極に近接する物体との間の静電容量に応じた出力をする検出センサの出力値に基づく比較値と、前記閉側端部に近接する異物の有無を判定するための検出しきい値とを比較し、その比較結果に基づいて前記閉側端部に近接する前記異物の有無を判定し、その判定結果に基づいて前記開閉部材の作動を制御する開閉装置の制御方法であって、前記開閉部材と隣り合い前記開口部における前記閉側端部と対向する部位を構成する隣接開閉部材が開いているときには、前記閉側端部に近接する前記異物の有無の判定を行わないことをその要旨としている。
同方法によれば、隣接開閉部材は、開閉部材の閉側端部と隣り合って設けられ開口部における閉側端部と対向する部位を構成するものであるため、隣接開閉部材が開いているときに開閉部材の閉作動が行われる場合には、隣接開閉部材と開閉部材との間に異物が挟み込まれる可能性が低い。そして、隣接開閉部材が開いているときに開閉部材の閉作動が行われる場合には、閉側端部に近接する異物の有無の判定を行わないことにより、隣接開閉部材が閉作動されたことに起因して異物が誤検知されることを防止することができる。従って、開閉部材の誤作動を抑制することができる。
本発明によれば、隣接開閉部材の閉作動によって異物が誤検知されることを抑制可能な開閉部材制御装置、開閉装置及び開閉装置の制御方法を提供することができる。
以下、本発明を具体化した一実施形態を図面に従って説明する。
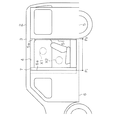
図1は、開閉装置としての電動スライドドア装置1を搭載した車両2を示す斜視図である。図1に示すように、車両2は、導電性金属材料よりなる車体3を備えるとともに、該車体3の左側側面には、四角形状をなす開口部としての乗降口4が形成されている。この乗降口4は、導電性金属材料により形成され該乗降口4に応じた四角形状をなすスライドドア5によって開閉される。
また、図2に示すように、スライドドア5の前方には、導電性金属材料よりなるスイングドア6が設けられている。このスイングドア6は、車体3に対してその前端部を中心に回動可能に取り付けられており、前席(助手席若しくは運転席)に乗り込むとき、若しくは前席から車室外に出るときに開閉される。また、閉鎖状態にあるスイングドア6は、乗降口4を閉鎖する全閉位置Pcに配置されたスライドドア5と車両2の前後方向に隣り合うとともに、同スイングドア6の後端部6aは、前記乗降口4におけるスライドドア5の前端部5a(閉側端部)と対向する部位を構成している。また、車室内には、全閉位置Pcに配置されたスライドドア5の前端部5a及び閉鎖状態にあるスイングドア6の後端部6aと車幅方向に対向するセンターピラー7が車両2の上下方向に延びている。
図1に示すように、前記スライドドア5は、乗降口4を開閉するために作動機構11を介して車体3に対して略前後方向に移動可能に取り付けられるとともに、該スライドドア5には、ラッチ等のロック機構(図示略)が設けられている。このロック機構は、スライドドア5が乗降口4を閉鎖した状態(即ちスライドドア5が全閉位置Pc(図2参照)に配置された状態)にある場合に、スライドドア5を車体3に対して移動不能とすべく固定するためのものである。そして、ロック機構の近傍には、リミットスイッチ等にて構成されたハーフラッチ検出手段(図示略)が設けられるとともに、該ハーフラッチ検出手段は、当該ロック機構がハーフラッチ状態になると、ハーフラッチ検出信号を出力する。
前記作動機構11は、車体3に設けられたアッパレール12、ロアレール13、センターレール14、及びスライドドア5側に設けられたアッパアーム15、ロアアーム16、センターアーム17から構成されている。
アッパレール12及びロアレール13は、車両2において乗降口4の上部及び下部にそれぞれ設けられるとともに、センターレール14は、車両2において乗降口4よりも後方となる部位の略中央部に設けられている。これら各レール12〜14は、その後端から前端側に向かって車両2の前後方向に沿うように直線的に形成されるとともに、途中からその前端側が車室内側に向くように湾曲している。
前記各アーム15〜17は、スライドドア5の車室内側の面における上部、下部及び中央部の所定位置にそれぞれ固定されている。そして、アッパアーム15は前記アッパレール12に対して、ロアアーム16は前記ロアレール13に対して、センターアーム17は前記センターレール14に対してそれぞれ連結されるとともに、各アーム15〜17は、各レール12〜14に案内されて車両2の前後方向に移動可能となっている。
また、前記ロアアーム16は、駆動機構21の駆動により車両2の前後方向に移動される。詳しくは、前記ロアレール13よりも車室内側となる位置には、車両2の上下方向の軸回りに回転する、駆動機構21の駆動プーリ22及び従動プーリ23が設けられている。そして、これら駆動プーリ22及び従動プーリ23には、無端ベルト24が掛け渡されるとともに、該無端ベルト24には、前記ロアアーム16の先端部が固定されている。また、図1及び図4に示すように、駆動プーリ22には、駆動機構21を構成するスライドアクチュエータ25が接続されている。スライドアクチュエータ25は、車室内側に配置されるとともに、スライドモータ26と、該スライドモータ26の回転を減速して出力する減速機構(図示略)とを備えている。そして、スライドモータ26が駆動されて駆動プーリ22が回転すると、無端ベルト24が従動回転して前記ロアアーム16が前後方向に移動し、前記スライドドア5が前後方向にスライド移動される。
また、スライドアクチュエータ25内には、スライドモータ26の回転を検出する位置検出装置27が配置されている。位置検出装置27は、例えば、スライドモータ26の回転軸(図示略)若しくは前記減速機構を構成する減速ギヤ(図示略)と一体回転するように設けられた永久磁石と、該永久磁石に対向配置されたホールIC(図示略)とから構成されている。そして、ホールICは、位置検出信号として、永久磁石の回転による該永久磁石の磁界の変化に応じたパルス信号を出力する。因みに、スライドドア5は、スライドモータ26の駆動力によって作動されるため、位置検出信号は、スライドドア5の位置及び移動量に応じた信号となる。そして、位置検出信号は、スライドドア5が所定距離移動する毎に、H(高電位)レベルからL(低電位)レベルへ、若しくはLレベルからHレベルへその電位レベルが切り替わる。
前記スライドドア5内には、前記駆動機構21を構成するクローザアクチュエータ28が配置されている。クローザアクチュエータ28は、クローザモータ29と、該クローザモータ29の回転を減速して出力する減速機構(図示略)とから構成されている。そして、クローザモータ29が駆動されると、前記ロック機構によるロックが可能な位置までスライドドア5が移動される。
また、図2及び図4に示すように、電動スライドドア装置1は、スライドドア5の開閉を指示するための操作スイッチ31を備えている。この操作スイッチ31は、車両2の搭乗者等によって乗降口4を開放するように操作されると、乗降口4を開放するようにスライドドア5を移動させる旨の開信号を出力する。一方、操作スイッチ31は、搭乗者等によって乗降口4を閉鎖するように操作されると、乗降口4を閉鎖するようにスライドドア5をスライド移動させる旨の閉信号を出力する。この操作スイッチ31は、車室内の所定箇所(ダッシュボード等)やスライドドア5のドアレバー(図示略)、イグニッションキーと共に携行される携行品(図示略)等に設けられている。
また、電動スライドドア装置1は、スライドドア5の前端部5aと、乗降口4との間に存在する導電性の異物X1及び導電性を有さない異物X2(図2参照)を検知するための異物検知装置41を備えている。
図2に示すように、異物検知装置41を構成するセンサ本体51は、ケーブル状をなし、スライドドア5の閉作動時における進行方向前方側の端部、即ちスライドドア5の前端部5aに沿って配置されている。センサ本体51は、その長手方向の長さがスライドドア5の前端部5aにおける上下方向の長さと略等しい長さに形成されるとともに、図示しない保持部材を介してスライドドア5の前端部5aに固定されている。
図3(a)に示すように、センサ本体51の中央部に設けられた絶縁層52は、弾性及び復元性を有する弾性変形可能な絶縁体(軟質の樹脂材料やゴム等)により形成されるとともに、略円筒状をなしている。絶縁層52の径方向中央部に設けられた離間孔52aは、該絶縁層52の長手方向に沿って延び該絶縁層52を長手方向に貫通している。
また、絶縁層52の内側には、該絶縁層52にて保持される4本の電極線53a〜53dが配置されている。各電極線53a〜53dは、導電性細線を撚り合わせて形成され可撓性を有する中心電極54と、導電性及び弾性を有し中心電極54の外周を被覆する円筒状の導電被覆層55とから構成されている。そして、4本の電極線53a〜53dは、絶縁層52の内側で周方向に離間して配置されるともに、それぞれ絶縁層52の長手方向に沿って螺旋状をなしている。本実施形態においては、絶縁層52の内側に配置された4本の電極線53a〜53dは、周方向に等間隔に配置されるとともに互いに非接触となっている。また、各電極線53a〜53dは、その周方向の約半分が絶縁層52内に埋設されている。
また、図4に示すように、電極線53a及び電極線53cは、長手方向の一端(図4において右側の端部)で導通するとともに、電極線53b及び電極線53dも、長手方向の一端(図4において右側の端部)で導通している。そして、電極線53cと電極線53dとは、長手方向の他端(図4において左側の端部)で抵抗56を介して導通している。更に、電極線53bの長手方向の他端(図4において左側の端部)は、グランドGNDに接続される(車体3に接地される)とともに、電極線53aの長手方向の他端(図4において左側の端部)は、後述の通電検知部61に電気的に接続されている。
また、絶縁層52の外周面は、可撓性及び導電性を有する円筒状のセンサ電極57にて被覆されるとともに、該センサ電極57は、後述の静電容量検出回路62に電気的に接続されている。更に、センサ電極57の外周は、弾性及び絶縁性を有する円筒状の外皮58にて被覆されている。
異物検知装置41を構成する通電検知部61は、車両2のバッテリBaから供給される電流を電極線53aに電流を供給する。そして、図3(a)及び図4に示すように、センサ本体51に押圧力が加えられていない通常の状態では、通電検知部61から電極線53aに供給される電流は、電極線53aから電極線53c,53dを介して電極線53bへ流れる際、抵抗56を介して流れる。一方、図3(b)及び図4に示すように、センサ本体51を直径方向に潰すような押圧力がセンサ本体51に加えられると、外皮58、センサ電極57及び絶縁層52が弾性変形するとともに該絶縁層52の弾性変形に伴って電極線53a〜53dが変形し、電極線53a及び電極線53cの何れか一方と、電極線53b及び電極線53dの何れか一方とが接触して短絡される。すると、電極線53aから電極線53c,53dを介して電極線53bへと流れる電流は、抵抗56を介さずに流れることになる。従って、例えば、一定の電圧で電極線53aに電流を供給している場合には電流値が変化するため、通電検知部61は、この時の電流値の変化を検知することにより、センサ本体51に押圧力が加えられたことを検知する。そして、通電検知部61は、この電流値の変化を検知すると、後述のドアECU70に接触検知信号を出力する。尚、センサ本体51に対する押圧力が取り除かれると、外皮58、センサ電極57及び絶縁層52が復元し、電極線53a〜53dも復元して非導通状態(非接触状態)となる。
図4に示すように、異物検知装置41を構成する静電容量検出回路62は、センサ電極57と電極線53aとの間の静電容量C1と、導電性の物体(スイングドア6、導電性の異物X2等)がセンサ本体51に近接した時に生じる浮遊容量C2との合成容量C3を測定し、その測定結果(即ち合成容量C3)を出力する。尚、この静電容量検出回路62と前記センサ本体51とが検出センサを構成する。
本実施形態の電動スライドドア装置1は、ドアECU70にて制御されている。ドアECU70は、ROM(Read only Memory),RAM(Random access Memory)等を備えたマイクロコンピュータとしての機能を有する。また、このドアECU70は、例えばスライドアクチュエータ25の近傍に配置され、車両2のバッテリBaから駆動電源の供給を受けている。そして、ドアECU70は、前記ハーフラッチ検出手段、操作スイッチ31、位置検出装置27、通電検知部61及び静電容量検出回路62等から入力される各種信号に基づいてスライドアクチュエータ25及びクローザアクチュエータ28を制御する。
ドアECU70は、図示しないカウンタ回路(位置認識手段)を備えており、該カウンタ回路は、前記位置検出信号の立上がり及び立下がりをカウントする。本実施形態では、カウンタ回路は、スライドドア5が開作動される際には、パルス数が加算されるように位置検出信号の立上がり及び立下がりをカウントし、閉作動される際には、パルス数が減算されるように位置検出信号の立上がり及び立下がりをカウントする。
また、ドアECU70は、スライドモータ26及びクローザモータ29が電気的に接続されたモータ駆動部71を備え、該モータ駆動部71は、操作スイッチ31が開信号を出力するとスライドドア5を全開位置Poまで開作動させるべくスライドアクチュエータ25を制御する。また、モータ駆動部71は、操作スイッチ31が閉信号を出力すると、スライドドア5を全閉位置Pcまで閉作動させるべくスライドアクチュエータ25を制御する。また、モータ駆動部71は、スライドドア5の閉作動中にハーフラッチ検出手段がハーフラッチ検出信号を出力すると、ロック機構によるロックが可能な位置までスライドドア5を移動させるべくクローザアクチュエータ28を制御する。
また、モータ駆動部71は、スライドドア5の閉作動中に前記通電検知部61が接触検知信号を出力すると、スライドモータ26を反転させて所定距離だけスライドドア5を開作動させた後にスライドモータ26を停止させる。
また、本実施形態のドアECU70は、スライドドア5の前端部5aに近接する異物X1,X2を検知するために、特性記憶装置72、バッファ装置73、変化量算出部74、比較部75、抽出部76、しきい値算出部77及び判定部78を備えている。
特性記憶装置72は、スイングドア6が閉まっている状態、且つスイングドア6の後端部6aとスライドドア5の前端部5aとの間に異物X1,X2が存在しない状態で、スライドドア5が全開位置Poから全閉位置Pcまで閉作動されるときに、スライドドア5の前端部5aに配置されたセンサ本体51を用いて静電容量検出回路62にて測定される合成容量C3(即ち静電容量検出回路62の出力値)を、スライドドア5の位置に対応して記憶している。詳しくは、図5に示すように、特性記憶装置72は、スライドドア5の移動に応じて出力される位置検出信号のパルス数に対応させて、静電容量検出回路62の出力値(即ち静電容量検出回路62にて測定した合成容量C3)を記憶している。尚、電動スライドドア装置1は、該電動スライドドア装置1が使用され始めるときに、スイングドア6が閉まっている状態、且つスイングドア6の後端部6aとスライドドア5の前端部5aとの間に異物X1,X2が存在しない状態で、スライドドア5を全開位置Poから全閉位置Pcまで閉作動させて、位置検出信号のパルス数と静電容量検出回路62の出力値とを対応させて特性記憶装置72に記憶する。
バッファ装置73は、静電容量検出回路62と電気的に接続されている。バッファ装置73は、最新の位置検出信号のパルス数を頭に過去Mパルス分(Mは正の整数)の前記静電容量検出回路62の出力値を配列状に記憶して保持する。本実施形態では、バッファ装置73は、[0]〜[15]に対応させて16パルス分(即ちM=15)の出力値を配列状に記憶する。バッファ装置73は、位置検出信号のパルス数が更新されると、記憶した各値に対応する数字(即ち[0]〜[15])が繰り下がるように記憶内容をシフトする。このとき、位置検出信号が更新される直前に[15]に対応して記憶されていた値は消去される。そして、バッファ装置73は、静電容量検出回路62による最新の出力値を[0]に対応して記憶する。
変化量算出部74は、バッファ装置73の記憶内容(即ち[0]〜[15]に対応して記憶された合成容量C3の値)から、静電容量検出回路62が出力する出力値(合成容量C3)の変化量を算出する。本実施形態では、変化量算出部74は、バッファ装置73の最新の記憶内容(即ち[0]に対応して記憶された出力値)と、最も古い記憶内容(即ち[15]に対応して記憶された出力値)との差分を算出する。これにより、変化量算出部74は、バッファ装置73が[0]に対応して合成容量C3の値を記憶したときの位置検出信号のパルス数となるまで15パルス分だけスライドドア5が閉作動される間の合成容量C3の変化量を算出する。そして、変化量算出部74は、その算出結果をセンサ出力変化量Dとする。
比較部75は、バッファ装置73の記憶内容と、最新のスライドドア5の位置を示す位置検出信号のパルス数の前後数パルスに対応した特性記憶装置72の記憶内容とを比較する。比較部75におけるバッファ装置73の記憶内容と特性記憶装置72の記憶内容との比較は、バッファ装置73の記憶内容に基づいて算出される出力値(記憶された合成容量C3の値)の変化量と、特性記憶装置72の記憶内容に基づいて算出される出力値(記憶された合成容量C3の値)の変化量とを比較することにより行われる。
本実施形態の比較部75は、最新のスライドドア5の位置を示す位置検出信号のパルス数を中心に前後10パルスの範囲に含まれる各パルス数(20種類のパルス数)を順に基準位置pに設定して、バッファ装置73の記憶内容と特性記憶装置72の記憶内容との比較を20回行う。この基準位置pを設定する範囲(本実施形態において20パルス分の範囲)は、作動機構11及び駆動機構21の機械的ながたつき等を考慮して設定されている。即ち、基準位置pを設定する範囲は、がたつきによるスライドドア5の最大限のずれ量分だけ同スライドドア5が移動する間にカウントされる位置検出信号のパルス数よりも大きな値に設定されている。
バッファ装置73の記憶内容と特性記憶装置72の記憶内容とを比較するために、比較部75は、バッファ装置73の記憶内容において、静電容量検出回路62の最新の出力値が対応された[0]を基準とする。そして、比較部75は、基準とした[0]から、導電性の異物X2のセンサ本体51への近接により静電容量検出回路62が出力する出力値に変化が現れ始めるときの異物X2とセンサ本体51との間の距離に該当する位置検出信号のパルス数よりも過去の3点に対応して記憶された出力値を用いて3種類の変化量A,B,Cを算出する。具体的には、比較部75は、バッファ装置73の記憶内容から、最新の出力値が対応して記憶された[0]を基準として、[0]から5パルス分過去の[5]に対応して記憶された出力値と、[0]から15パルス分過去の[15]に対応して記憶された出力値との差分を変化量Aとして算出する。また、比較部75は、バッファ装置73の記憶内容から、[5]に対応して記憶された出力値と、[0]から10パルス分過去の[10]に対応して記憶された出力値との差分を変化量Bとして算出する。更に、比較部75は、バッファ装置73の記憶内容から、[10]に対応して記憶された出力値と、[15]に対応して記憶された出力値との差分を変化量Cとして算出する。
また、比較部75は、最新のスライドドア5の位置(現在のスライドドア5の位置)を示す位置検出信号のパルス数に基づいて基準位置pを設定する。そして、比較部75は、特性記憶装置72の記憶内容において、基準位置pから、導電性の異物X2のセンサ本体51への近接により静電容量検出回路62が出力する出力値に変化が現れ始めるときの異物X2とセンサ本体51との間の距離に該当する位置検出信号のパルス数よりも過去の3点に対応して記憶された出力値を用いて3種類の変化量a,b,cを算出する。具体的には、比較部75は、基準位置pから5パルス分過去の[p+5]に対応して特性記憶装置72に記憶された出力値と、基準位置pから15パルス分過去の[p+15]に対応して特性記憶装置に記憶された出力値との差分を変化量aとして算出する。また、比較部75は、特性記憶装置72の記憶内容から、[p+5]に対応して記憶された出力値と、基準位置pから10パルス分過去の[p+10]に対応して記憶された出力値との差分を変化量bとして算出する。更に、比較部75は、特性記憶装置72の記憶内容から、[p+10]に対応して記憶された出力値と、[p+15]に対応して記憶された出力値との差分を変化量cとして算出する。
そして、比較部75は、基準とした点から同じパルス数だけ過去の位置について算出した対応する変化量同士、即ち、変化量Aと変化量a、変化量Bと変化量b、変化量Cと変化量cをそれぞれ比較し、その比較結果を抽出部76に出力する。
尚、静電容量検出回路62が出力する出力値は、閉作動時のスライドドア5の位置の変化に伴って曲線的に変化する。従って、上記したように、比較部75において、バッファ装置73の3点(即ち[5],[10],[15])に対応した出力値から3種類の変化量を算出するとともに、特性記憶装置72の3点(即ち[p+5],[p+10],[p+15])に対応した出力値から3種類の変化量を算出することにより、バッファ装置73の記憶内容(出力値の波形)と特性記憶装置72の記憶内容(出力値の波形)との比較をより精度よく行うことができる。
図4及び図5に示すように、抽出部76は、比較部75が出力した比較結果に基づいて、バッファ装置73の記憶内容(記憶した出力値の波形)が、特性記憶装置72の記憶内容(予め記憶した出力値の波形)に対して類似する(一致を含む)位置を抽出する。本実施形態では、抽出部76は、比較部75において、変化量Aと変化量aとが類似し、変化量Bと変化量bとが類似し、更に変化量Cと変化量cとが類似すると判定された場合に、特性記憶装置72においてバッファ装置73の[0]に対応する値である基準位置pを抽出する。
しきい値算出部77は、スライドドア5の閉作動時にセンサ本体51に近接、即ちスライドドア5の前端部5aに近接する導電性の異物X2が存在するか否かを判定するために前記センサ出力変化量Dと比較される検出しきい値Thを算出する。そして、図6に示すように、しきい値算出部77は、検出しきい値Thを算出するための第1のしきい値Th1及び第2のしきい値Th2を持っている。
第1のしきい値Th1は、センサ本体51に異物X2が近接したときに静電容量検出回路62にて実際に測定される合成容量C3の変化量に基づいて予め設定されるとともに、スライドドア5の位置に拘わらず一定の値である。また、第2のしきい値Th2もスライドドア5の位置に拘わらず一定の値であるが、第1のしきい値Th1とは異なる値に設定されている。第2のしきい値Th2は、スライドドア5の閉作動中にスイングドア6が閉作動されたときに静電容量検出回路62にて実際に測定される合成容量C3の変化量と、センサ本体51に異物X2が近接したときに静電容量検出回路62が実際に出力する出力値の変化量とを考慮して、スイングドア6の閉作動による合成容量C3の変化によって異物X2の誤検知が生じない値に予め設定されている。即ち、第2のしきい値Th2は、スライドドア5の閉作動中にスイングドア6が閉作動されたときに静電容量検出回路62が出力する出力値の変化量よりも大きい一方、センサ本体51に異物X2が近接したときに静電容量検出回路62が出力する出力値の変化量よりも小さい値に設定されている。そのため、第2のしきい値Th2は、第1のしきい値Th1よりも大きな値に設定されている。
そして、しきい値算出部77は、前記抽出部76において基準位置pが抽出されている場合には、当該抽出部76の抽出結果に基づいてスイングドア6が閉まっていると判定し(スイングドア6が閉まっていることを検知し)、第1のしきい値Th1に第1のしきい値補正量max_matchを加算した値を検出しきい値Thとして算出する。尚、第1のしきい値補正量max_matchを算出するには、抽出部76において抽出された全ての基準位置pに対して、基準位置pに対応して特性記憶装置72に記憶された出力値と、同基準位置pからNパルス前(即ち基準位置pからNパルスだけ全開位置Po側)の位置(パルス数)に対応して特性記憶装置72に記憶された出力値との差分を算出する。そして、算出した差分の最大値が第1のしきい値補正量max_matchとされる。因みに、「N」は、前記センサ出力変化量Dを算出するときに用いられたバッファ装置73の2つの出力値に対応された数字(即ち[0]及び[15])の差分に等しく、本実施形態では「N=15」である。
一方、前記抽出部76において基準位置pが1つも抽出されていない場合には、しきい値算出部77は、当該抽出部76の抽出結果に基づいてスイングドア6が開いていると判定し(スイングドア6が開いていることを検知し)、第2のしきい値Th2に第2のしきい値補正量max_unmatchを加算した値を検出しきい値Thとして算出する。尚、第2のしきい値補正量max_unmatch算出するには、比較部75において設定した全ての基準位置p(即ち連続した20種類のパルス数)に対して、基準位置pに対応して特性記憶装置72に記憶された出力値と、基準位置pからNパルス前の位置(パルス数)に対応して特性記憶装置72に記憶された出力値との差分を算出する。そして、算出した差分の最大値が第2のしきい値補正量max_unmatchとされる。しきい値算出部77は、算出した検出しきい値Thを判定部78に出力する。
図4及び図5に示すように、判定部78は、前記しきい値算出部77において算出された検出しきい値Thと前記センサ出力変化量Dとを比較し、その判定結果を出力する。判定部78は、センサ出力変化量Dが検出しきい値Th以下である場合には、センサ本体51に近接、即ちスライドドア5の前端部5aに近接する導電性の異物X2は存在しないと判定する。一方、センサ出力変化量Dが検出しきい値Thよりも大きい場合には、判定部78は、センサ本体51に近接、即ちスライドドア5の前端部5aに近接する導電性の異物X2が存在すると判定する。
次に、スライドドア5の閉作動時にドアECU70が行う挟み込み判定制御を、図8乃至図10に示すフローチャートを参照して説明する。尚、ドアECU70は、スライドドア5の閉作動が終了若しくは中断されるまでこの挟み込み判定制御を繰り返し行う。
ドアECU70は、ステップS1において、位置検出信号のパルス数が更新されたか否かを判定する。ドアECU70は、位置検出信号のパルス数が更新されている場合(ステップS1:YES)にはステップS2に進み、位置検出信号のパルス数が更新されていない場合(ステップS1:NO)には、ステップS3に進む。
ステップS2において、ドアECU70は、バッファ装置73において、記憶した各出力値(合成容量C3)に対応する[0]〜[15]の数字が繰り下がるように記憶内容をシフトする。このとき、位置検出信号が更新される直前に[15]に対応して記憶されていた出力値は消去される。そして、ドアECU70はステップS3に進む。
ステップS3において、ドアECU70は、バッファ装置73において、静電容量検出回路62から出力された最新の出力値(即ち測定された最新の合成容量C3)を[0]に対応して記憶してステップS4に進む。
ステップS4において、ドアECU70は、比較部75において、[5],[10],[15]に対応してバッファ装置73に記憶された出力値から変化量A,B,Cを算出する。また、ドアECU70は、変化量算出部74において、バッファ装置73の最新の記憶内容(即ち[0]に対応して記憶された出力値)と、最古の記憶内容(即ち[15]に対応して記憶された出力値)との差分を算出してセンサ出力変化量Dとする。そして、ドアECU70はステップS5に進む。
ステップS5において、ドアECU70は、「n=0」とするとともに、抽出部76において「flag=0」とする。この「flag」は、抽出部76において基準位置pを抽出するためのものである。また、ドアECU70は、比較部75において、現在のスライドドア5の位置を示す位置検出信号の最新のパルス数から10パルスだけ減算した数を基準位置pとする。更に、ドアECU70は、第1のしきい値補正量max_match及び第1のしきい値補正量max_matchを、制御上で最小の値となる「−32768」とする。そして、ドアECU70はステップS6に進む。
ステップS6において、ドアECU70は、比較部75において、[p+5],[p+10],[p+15]に対応して特性記憶装置72に記憶された出力値から変化量a,b,cを算出してステップS7に進む。
ステップS7において、ドアECU70は、しきい値算出部77において、第1のしきい値補正量max_match及び第2のしきい値補正量max_unmatchを決定するための最大変化量tmpを算出する。しきい値算出部77は、特性記憶装置72において[p]に対応して記憶された出力値と[p+15]に対応して記憶された出力値との差分を算出して、最大変化量tmpとする。そして、ドアECU70は、ステップS8に進む。
ステップS8において、ドアECU70は、しきい値算出部77において、第2のしきい値補正量max_unmatchと最大変化量tmpとを比較する。そして、最大変化量tmpが第2のしきい値補正量max_unmatchよりも大きい場合(ステップS8:YES)には、ドアECU70は、ステップS9において第2のしきい値補正量max_unmatchを最大変化量tmpと同じ値に変更してステップS10に進む。一方、最大変化量tmpが第2のしきい値補正量max_unmatch以下である場合(ステップS8:NO)には、ドアECU70は、第2のしきい値補正量max_unmatchの値を変更することなく直接ステップS10に進む。
ステップS10において、ドアECU70は、比較部75において、変化量Aと変化量aとを比較し、その差分が10(10[F])より小さい場合(ステップS10:YES)には、ステップS11に進む。
ステップS11において、ドアECU70は、比較部75において、変化量Bと変化量bとを比較し、その差分が10(10[F])より小さい場合(ステップS11:YES)には、ステップS12に進む。
ステップS12において、ドアECU70は、比較部75において、変化量Cと変化量cとを比較し、その差分が10(10[F])より小さい場合(ステップS12:YES)には、ステップS13に進む。
ステップS13において、ドアECU70は、抽出部76において「flag=1」としてステップS14に進む。尚、抽出部76は、前記ステップS10〜S12において、変化量Aと変化量aとが類似し、変化量Bと変化量bとが類似し、更に変化量Cと変化量cとが類似したことに基づいて、バッファ装置73の現在の記憶内容が、現状の基準位置pから過去15パルス分の特性記憶装置72の記憶内容に類似(一致を含む)している判定している。そして、抽出部76は、「flag=1」とすることにより現状の基準位置pを抽出している。
ステップS14において、ドアECU70は、しきい値算出部77において、第1のしきい値補正量max_matchと最大変化量tmpとを比較する。そして、最大変化量tmpが第1のしきい値補正量max_matchよりも大きい場合(ステップS14:YES)には、ドアECU70は、ステップS15において第1のしきい値補正量max_matchを最大変化量tmpと同じ値に変更してステップS16に進む。一方、最大変化量tmpが第1のしきい値補正量max_match以下である場合(ステップS14:NO)には、ドアECU70は、第1のしきい値補正量max_matchの値を変更することなく直接ステップS16に進む。
前記ステップS10において、変化量Aと変化量aとの差分が10以上である場合(ステップS10:NO)には、抽出部76においてバッファ装置73の現在の記憶内容は現状の基準位置pから過去15パルス分の特性記憶装置72の記憶内容に類似(一致を含む)しないとして、ドアECU70は、しきい値算出部77において第1のしきい値補正量max_matchを変更することなくステップS16に進む。
同様に、前記ステップS11において変化量Bと変化量bとの差分が10以上である場合(ステップS11:NO)、また、前記ステップS12において変化量Cと変化量cとの差分が10以上である場合(ステップS12:NO)には、抽出部76においてバッファ装置73の現在の記憶内容は現状の基準位置pから過去15パルス分の特性記憶装置72の記憶内容に類似(一致を含む)しないとして、ドアECU70は、しきい値算出部77において第1のしきい値補正量max_matchを変更することなくステップS16に進む。
ステップS16において、ドアECU70は、「n=n+1」,「p=p+1」としてステップS17に進む。
ステップS17において、ドアECU70は、nが20より小さい場合(ステップS17:NO)には、前記ステップS6に進み、nが20になるまでステップS6〜S16を繰り返す。そして、nが20になると(ステップS17:YES)、ドアECU70はステップS18に進む。
ステップS18において、ドアECU70は、しきい値算出部77において、「flag=1」であるか否か、即ち抽出部76において抽出された基準位置pが存在するか否かを判定する。「flag=1」である、即ち抽出部76において抽出された基準位置pが存在する(ステップS18:YES)場合には、しきい値算出部77は、スイングドア6は閉まっていると判定し、ステップS19において、第1のしきい値Th1に第1のしきい値補正量max_matchを加算して検出しきい値Thを算出する。そして、ステップS20において、ドアECU70は、判定部78において、スイングドア6が閉まっている場合に応じて算出された検出しきい値Th(図6参照)とセンサ出力変化量Dとを比較する。センサ出力変化量Dが検出しきい値Thよりも大きい場合(ステップS20:YES)には、ドアECU70は、ステップS21に進み、判定部78において、センサ本体51に近接する、即ちスライドドア5の前端部5aに近接する導電性の異物X2が存在することを示す挟み込み判定結果「1(高電位の電気信号)」を出力して挟み込み判定制御を終了する。一方、センサ出力変化量Dが検出しきい値Thよりも大きい場合(ステップS20:NO)には、ドアECU70は、ステップS22に進み、判定部78において、センサ本体51に近接する、即ちスライドドア5の前端部5aに近接する導電性の異物X2が存在しないことを示す挟み込み判定結果「0(低電位の電気信号)」を出力して挟み込み判定制御を終了する。
一方、前記ステップS18において、「flag=1」でない、即ち抽出部76において抽出された基準位置pが1つも存在しない場合(ステップS18:NO)には、特性記憶装置72の記憶内容にバッファ装置73の記憶内容が類似する部位が無いことから、スイングドア6が開放されている可能性があると考えられる。更に、スライドドア5の閉作動が継続されていることから、これまでにセンサ出力変化量Dが検出しきい値Thを超えたことが無いと考えられる。そして、図6に示すように、スイングドア6が開いている場合には、スライドドア5が全閉位置Pcに近づいても出力値が大きく上昇しない。そこで、図10に示すように、ステップS18において「flag=1」でない場合には、ドアECU70は、しきい値算出部77において、スイングドア6は開いていると判定し、ステップS23に進み、しきい値算出部77において第2のしきい値Th2に第2のしきい値補正量max_unmatchを加算して検出しきい値Thを算出してステップS20に進む。そして、ステップS20において、ドアECU70は、判定部78において、スイングドア6が開いている場合に応じて算出された検出しきい値Th(図6参照)とセンサ出力変化量Dとを比較する。センサ出力変化量Dが検出しきい値Thよりも大きい場合(ステップS20:YES)には、ドアECU70は、ステップS21に進み、挟み込み判定結果「1(高電位の電気信号)」を出力して挟み込み判定制御を終了する。一方、センサ出力変化量Dが検出しきい値Thよりも大きい場合(ステップS20:NO)には、ドアECU70は、ステップS22に進み、判定部78において、挟み込み判定結果「0(低電位の電気信号)」を出力して挟み込み判定制御を終了する。
次に、スライドドア5の閉作動時にドアECU70が行う開閉装置駆動制御を、図11に示すフローチャートを参照して説明する。尚、ドアECU70は、車両2に搭載された電子キーシステムを構成する電子キーから発しされたスライドドア5の施錠・解錠を指示する信号を車両2の制御装置(図示略)が受信している場合等、スライドドア5の開閉作動が行われる可能性のある場合に、この開閉装置駆動制御を繰り返し行っている。
ドアECU70は、ステップS31において、スライドドア5が電動で閉作動中であるか否かを判定する。スライドドア5が電動で閉作動中である場合(ステップS31:YES)には、ドアECU70はステップS32に進む。
ステップS32において、ドアECU70は、特性記憶装置72にスライドドア5の位置に対応した出力値が記憶されているか否かを確認する。特性記憶装置72にスライドドア5の位置に対応した出力値が記憶されている場合(ステップS32:YES)には、ドアECU70は、ステップS33に進む。
ステップS33において、ドアECU70は、前述した挟み込み判定制御を行ってステップS34に進む。
ステップS34において、ドアECU70は、判定部78が出力した挟み込み判定結果が「1(高電位の電気信号)」であるか否かを判定する。挟み込み判定結果が「1」である場合(ステップS34:YES)、即ちスライドドア5の前端部5aに近接する異物X2が検知された場合には、ドアECU70は、ステップS35に進み、異物X2の挟み込みを回避すべくスライドモータ26を反転させて所定距離だけスライドドア5を開作動させた後にスライドドア5を停止して閉作動を中断して開閉装置駆動制御を終了する。一方、挟み込み判定結果が「1」でない、即ち「0(低電位の電気信号)」である場合(ステップS34:NO)には、電動でのスライドドア5の閉作動を継続したまま開閉装置駆動制御を終了する。
また、前記ステップS31において、スライドドア5が電動で閉作動されていない場合(ステップS31:NO)には、開閉装置駆動制御を終了する。
また、前記ステップS32において、特性記憶装置72にスライドドア5の位置に対応した出力値が記憶されていない場合(ステップS32:NO)には、特性記憶装置72おいて位置検出信号のパルス数に対応して出力値を記憶している最中である可能性があるため、ドアECU70は、ステップS36に進み、スライドドア5の電動での閉作動を継続したまま開閉装置駆動制御を終了する。
上記したように、本実施形態によれば、以下の効果を有する。
(1)しきい値算出部77は、スイングドア6の開閉状態に応じて検出しきい値Thを補正する。従って、スイングドア6の閉作動が行われる可能性のあるとき、即ちスイングドア6が開いているときにスライドドア5の閉作動が行われる場合には、しきい値算出部77が、検出しきい値Thを、スイングドア6の閉作動による静電容量検出回路62の出力値の変化を考慮した値に補正(即ち、第2のしきい値Th2に第2のしきい値補正量max_unmatchを加算して算出)することにより、スイングドア6の閉作動に起因した異物X2の誤検知を抑制することができる。その結果、スライドドア5の誤作動を抑制することができる。
(2)スイングドア6の開閉状態は、静電容量検出回路62の出力値に基づいてしきい値算出部77において検知されるため、別途、スイングドア6の開閉状態を検知するための構成を備えなくてもよい。従って、部品点数の増大が抑制されて製造コストの増大が抑制されるとともに、電動スライドドア装置1が複雑化されることを抑制できる。
(3)しきい値算出部77は、スイングドア6が開いているときには、スイングドア6が閉まっているときに使用する第1のしきい値Th1よりも値の大きな第2のしきい値Th2を用いて検出しきい値Thを算出する。従って、スイングドア6が開いているときには、スイングドア6が閉まっているときよりも値の大きな検出しきい値Thを用いてスライドドア5の前端部5aに近接する異物X2の有無の判定が行われる。一般的に、スライドドア5の閉作動中にスイングドア6の閉作動が行われると、スイングドア6とセンサ本体51との間の距離が突然短くなり、このスイングドア6の閉作動に起因して静電容量検出回路62の出力値が大きく変化することがある。そこで、本実施形態のように、スイングドア6の閉作動が行われる可能性のあるとき、即ちスイングドア6が開いているときには、スイングドア6が閉まっているときよりも大きくなるように検出しきい値Thが補正されることにより、スイングドア6の閉作動に起因した異物の誤検知を一層抑制することができる。その結果、スライドドア5の誤作動を一層抑制することができる。
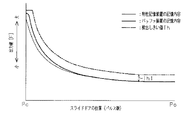
(4)一般的に、スライドドア5の前端部5aに雪や氷の塊等の導電性の物体が付着した状態で該スライドドア5が閉作動されると、導電性の物体がセンサ電極57と同様の働きをするようになる。そのため、乗降口4におけるスライドドア5の前端部5aと対向する部位(即ちスイングドア6の後端部6a)と、センサ電極57との間の距離が擬似的(電気的に)に短くなってしまう。すると、図7に示すように、スライドドア5の位置が同じ位置であっても、導電性の物体がスライドドア5の前端部5aに付着していないときに比べて静電容量検出回路62が出力する出力値が大きくなる。そして、スライドドア5が全閉位置Pcに近づくほど、スライドドア5の前端部5aに付着した導電性の物体が静電容量検出回路62の出力に及ぼす影響は顕著となり、異物X2の誤検知を招く虞がある。
そして、本実施形態の電動スライドドア装置1においては、比較部75は、最新のスライドドア5の位置を示す位置検出信号のパルス数を中心に前後10パルスの範囲に含まれる各パルス数を順に基準位置pに設定する。更に、比較部75は、各基準位置pから過去Mパルス分(本本実施形態では過去15パルス分)に対応して特性記憶装置72に記憶された出力値から算出した当該出力値の変化量(即ち変化量a,b,c)と、バッファ装置73に記憶された出力値から算出した当該出力値の変化量(即ち変化量A,B,C)とを比較する。また、抽出部76は、比較部75での比較結果から、特性記憶装置72の記憶内容に対してバッファ装置73の記憶内容が類似する部位がある場合には、バッファ装置73の記憶内容が特性記憶装置72の記憶内容に類似するときの基準位置pを抽出する。従って、スライドドア5の前端部5aに雪が付着した場合や、スライドドア5に生じた機械的ながたつきの影響によって、位置検出信号のパルス数と静電容量検出回路62の出力値との関係が、特性記憶装置72に記憶された位置検出信号のパルス数と出力値との関係とはずれている場合であっても、スイングドア6が閉まっているときには、しきい値算出部77は、抽出部76にて抽出された基準位置pに基づいて特性記憶装置72の記憶内容を参照することにより、特性記憶装置72の適切な記憶内容を参照して検出しきい値Thを算出することができる。その結果、判定部78では、適切な検出しきい値Thを用いてスライドドア5の前端部5aに近接する異物X2の有無を判定することができるため、異物X2の誤検知をより一層抑制することができる。
(5)抽出部76で抽出された全ての基準位置pに関して、基準位置pに対応して特性記憶装置72に記憶された出力値と基準位置pから15パルス分前のパルス数に対応して特性記憶装置72に記憶された出力値との差分を算出し、その算出結果の最大値を第1のしきい値補正量としている。従って、スライドドア5が、スイングドア6に近接することにより静電容量検出回路62の出力値が増大する全閉位置Pcに近づくほど、第1のしきい値補正量max_matchは大きな値になる。よって、第1のしきい値補正量max_matchを第1のしきい値Th1に加算して算出される検出しきい値Thは、スライドドア5がスイングドア6に近接したことに起因する静電容量検出回路62の出力値の増大を許容する値となることから、異物X2の誤検知がより確実に抑制される。
(6)抽出部76において基準位置pが1つも抽出されていない場合には、バッファ装置73の記憶内容が特性記憶装置72の記憶内容に対して類似する部位が無いということであり、抽出部76において基準位置p1つも抽出されない状態でスライドドア5の閉作動が継続されている場合には、スイングドア6が開いている可能性がある。そして、しきい値算出部77は、抽出部76において基準位置pが1つも抽出されていない場合には、スイングドア6の閉作動が行われるときの静電容量検出回路62の出力値に基づいて設定された第2のしきい値Th2に、算出した第2のしきい値補正量max_unmatchを加算して検出しきい値Thを算出するため、判定部78においては、スイングドア6の閉作動に起因した異物X2誤検知を抑制できる適切な検出しきい値Thを用いて、スライドドア5の前端部5aに近接する異物X2の有無の判定を行うことができる。
(7)特性記憶装置72は、スイングドア6が閉まっている状態でスライドドア5が全開位置Poから全閉位置Pcまで閉作動されたときの静電容量検出回路62の出力値を位置検出信号のパルス数に対応させて配列状に記憶している。従って、特性記憶装置72には、電動スライドドア装置1の特性が静電容量検出回路62の出力に及ぼす影響が記憶される。そのため、該電動スライドドア装置1を備えた車両2は、車両2ごとに電動スライドドア装置1のチューニング作業を行わなくてもよくなる。
(8)比較部75は、基準とした[0]から、導電性の異物X2のセンサ本体51への近接により静電容量検出回路62が出力する出力値に変化が現れ始めるときの異物X2とセンサ本体51との間の距離に該当する位置検出信号のパルス数よりも過去の3点に対応して記憶された出力値を用いて3種類の変化量A,B,Cを算出する。また、比較部75は、特性記憶装置72の記憶内容において、基準位置pから、導電性の異物X2のセンサ本体51への近接により静電容量検出回路62が出力する出力値に変化が現れ始めるときの異物X2とセンサ本体51との間の距離に該当する位置検出信号のパルス数よりも過去の3点に対応して記憶された出力値を用いて3種類の変化量a,b,cを算出する。従って、導電性の異物X2が出力値に及ぼす影響を受けることなく変化量A,B,Cと変化量a,b,cとの比較を行うことができる。よって、バッファ装置73の記憶内容が特性記憶装置72の記憶内容に類似する部位をより正確に特定でき、抽出部76において抽出される基準位置pが実際のスライドドア5の位置に一致、若しくは実際のスライドドア5の位置に近い位置となる。
(9)抽出部76では、変化量Aと変化量a、変化量Bと変化量b、変化量Cと変化量cのそれぞれの差分が、10[F]より小さい場合に、基準位置pを抽出する。即ち、変化量Aと変化量a、変化量Bと変化量b、変化量Cと変化量cのそれぞれの差分に10[F]の誤差を許容して、基準位置pからp+15の位置検出信号のパルス数の範囲に対応する出力値と、バッファ装置73に記憶された出力値とが類似すると判定している。従って、スライドドア5が全開位置Po付近を移動している場合等、スイングドア6の影響が出力値に現れにくい場合には、基準位置pが抽出されやすく、第2のしきい値Th2よりも値の小さい第1のしきい値Th1を用いて検出しきい値Thが算出される。従って、スライドドア5の前端部5aに近接する異物X2を敏感に検知することができる。
尚、本発明の実施形態は、以下のように変更してもよい。
・上記実施形態では、バッファ装置73は、[0]〜[15]に対応して連続した16パルス分の位置検出信号に対応する出力値を記憶している。しかしながら、バッファ装置73に記憶する出力値の数は、比較部75において変化量の算出が可能な数であれば、適宜変更してもよい。
・上記実施形態では、比較部75は、バッファ装置73の記憶内容と特性記憶装置72の記憶内容とを比較するときに、出力値の変化量を3つずつ算出している。しかしながら、バッファ装置73の記憶内容と特性記憶装置72の記憶内容とを比較するために算出する出力値の変化量は、それぞれ4つ以上であってもよい。
・上記実施形態の挟み込み判定制御におけるステップS18以降のステップを、図12に示すフローチャートのように変更してもよい。尚、図12においては、上記実施形態と同じステップには同じ符号を付している。
詳述すると、ドアECU70は、ステップS17(図9参照)において、nが20以上である場合(ステップS17:YES)に、ステップS101に進む。そして、ステップS101では、ドアECU70は、しきい値算出部77において、第1のしきい値Th1に第1のしきい値補正量max_matchを加算して検出しきい値Thを算出してステップS102に進む。
ステップS102において、ドアECU70は、しきい値算出部77において、「flag=1」であるか否か、即ち抽出部76において抽出された基準位置pが存在するか否かを判定する。「flag=1」である、即ち抽出部76において抽出された基準位置pが存在する(ステップS18:YES)場合には、しきい値算出部77は、スイングドア6は閉まっていると判定し、ステップS103に進む。
ステップS103において、ドアECU70は、判定部78において、「flag2=0」であるか否かを判定する。判定部78は、「flag2=0」である場合(ステップS103:YES)には、異物X2の挟み込み判定を行うものとして、ステップS20に進み、スイングドア6が閉まっている場合に応じて算出された検出しきい値Thとセンサ出力変化量Dとを比較する。センサ出力変化量Dが検出しきい値Thよりも大きい場合(ステップS20:YES)には、ドアECU70は、ステップS21に進み、判定部78において、スライドドア5の前端部5aに近接する導電性の異物X2が存在することを示す挟み込み判定結果「1」を出力して挟み込み判定制御を終了する。一方、センサ出力変化量Dが検出しきい値Thよりも大きい場合(ステップS20:NO)には、ドアECU70は、ステップS22に進み、判定部78において、スライドドア5の前端部5aに近接する導電性の異物X2が存在しないことを示す挟み込み判定結果「0」を出力して挟み込み判定制御を終了する。
一方、前記ステップS103において、「flag2=1」である場合(ステップS103:NO)には、ドアECU70は、判定部78において、異物X2の挟み込み判定を行わないものとして、ステップS22に進み、スライドドア5の前端部5aに近接する導電性の異物X2が存在しないことを示す挟み込み判定結果「0」を出力して挟み込み判定制御を終了する。
尚、挟み込み判定制御は、スライドドア5の閉作動が電動で行われている間は繰り返し行われるため、ステップS102において、「flag=1」でない、即ちスイングドア6が開いていると判定された場合であっても、その後にスイングドア6が閉められるとステップS102において「flag=1」であると判定されるようになる。従って、ドアECU70は、ステップS103からステップS20に進むようになり、異物X2の挟み込み判定が行われるようになる。
また、挟み込み判定制御におけるステップS17から先のステップが図12に示すように行われる場合には、開閉装置駆動制御を図13に示すフローチャートに置き換えられる。尚、図13では、上記実施形態と同じステップには同じ符号を付している。図13に示す開閉装置駆動制御では、ドアECU70は、ステップS31において、スライドドア5が電動で閉作動中である場合(ステップS31:YES)には、ステップS111に進み、ステップS111において「flag2=0」として開閉装置駆動制御を終了する。
スイングドア6は、スライドドア5の前端部5aと隣り合って設けられ乗降口4における前端部5aと対向する部位を構成するものであるため、スイングドア6が開いているときにスライドドア5の閉作動が行われる場合には、スライドドア5とスイングドア6との間に異物X2が挟み込まれる可能性が低い。そこで、上記したように、スイングドア6が開いているときにスライドドア5の閉作動が行われる場合には、判定部78においてスライドドア5の前端部5aに近接する異物X2の有無の判定を行わないことにより、スイングドア6が閉作動されたことに起因して異物X2が誤検知されることを防止することができる。従って、スライドドア5の誤作動を抑制することができる。
・上記実施形態では、第1のしきい値Th1及び第2のしきい値Th2は、スライドドア5の位置に拘わらず一定の値に設定されている。しかしながら、第1のしきい値Th1及び第2のしきい値Th2は、スライドドア5の位置に応じて変化するように設定されてもよい。例えば、スライドドア5が全閉位置Pc付近に位置する場合には、異物X2を敏感に検知できるように、スライドドア5が全開位置Po付近に位置する場合よりも小さい値に第1のしきい値Th1及び第2のしきい値Th2を設定してもよい。
・上記実施形態では、検出しきい値Thは、第1のしきい値Th1に第1のしきい値補正量max_matchを加算して算出、若しくは第2のしきい値Th2に第2のしきい値補正量max_unmatchを加算して算出している。しかしながら、検出しきい値Thは、算出するのではなく、スライドドア5の位置に対応して予め設定された値としてもよい。この場合、検出しきい値Thは、スイングドア6が閉まっているときの静電容量検出回路62の出力値に基づいて設定される検出しきい値と、スイングドア6の閉作動による出力値の変化を考慮して設定される検出しきい値との2種類設定される。そして、スイングドア6の開閉状態に応じて2種類の検出しきい値が使い分けられる。
・上記実施形態では、電動スライドドア装置1は、該電動スライドドア装置1が使用され始めるときに、スイングドア6が閉まっている状態、且つスイングドア6の後端部6aとスライドドア5の前端部5aとの間に異物X1,X2が存在しない状態で、スライドドア5を全開位置Poから全閉位置Pcまで閉作動させて、位置検出信号のパルス数と静電容量検出回路62の出力値とを対応させて特性記憶装置72に記憶する。しかしながら、車両2が完成して出荷する直前等、電動スライドドア装置1が使用され始めるときよりも前に、スライドドア5の閉作動を行って位置検出信号のパルス数と静電容量検出回路62の出力値とを配列状に特性記憶装置72に記憶しておいてもよい。
・上記実施形態では、静電容量検出回路62が出力する出力値の変化量(即ちセンサ出力変化量D)を算出し、その変化量を用いてスライドドア5の前端部5aに近接する異物X2を検知する。しかしながら、静電容量検出回路62が出力する出力値をそのまま前記異物X2の検知に使用してもよい。例えば、スイングドア6が閉まっているときには、特性記憶装置72において閉作動中のスライドドア5の位置と同じ位置に対応して記憶された出力値に第1のしきい値Th1を加算した値を検出しきい値Thとする。また、スイングドア6が開いているときには、特性記憶装置72において閉作動中のスライドドア5の位置と同じ位置に対応して記憶された出力値に第2のしきい値Th2を加算した値を検出しきい値Thとする。そして、いずれの場合においても、算出した検出しきい値Thと、静電容量検出回路62が出力した出力値とを比較して、当該出力値が検出しきい値Thよりも大きい場合に、スライドドア5の前端部5aに近接する異物X2があると判定する。
・上記実施形態では、静電容量検出回路62は、センサ本体51を用いて測定した合成容量C3の値を出力するが、合成容量C3の変化量を出力する構成であってもよい。この場合でも上記実施形態と同様に、静電容量検出回路62の出力値に基づいて、スイングドア6の開閉状態の検知、及びスライドドア5の前端部5aに近接する異物X2の検知を行うことができる。
・上記実施形態では、スイングドア6の開閉状態は、スライドドア5の前端部5aに設けられたセンサ本体51を用いて静電容量検出回路62が出力する出力値に基づいて検知される。しかしながら、スイングドア6の開閉状態は、別の構成で検知されてもよい。例えば、スイングドア6の近傍に、同スイングドア6が開いているとオン信号を出力し、同スイングドア6が閉まっているとオフ信号を出力するリミットスイッチ(開閉状態検知手段)を配置して、該リミットスイッチが出力する信号に基づいてスイングドア6の開閉状態を検知する構成としてもよい。
・センサ本体51の構成は、近接する物体との間の静電容量に応じた値を検出可能であれば上記実施形態の構成に限らない。例えば、センサ電極57は、断面半円状、平板状等であってもよい。また、絶縁層52の内側に配置された電極線の本数は、4本に限らず、2本であってもよい。
・上記実施形態では、電動スライドドア装置1は、センサ本体51及び通電検知部61により、スライドドア5の前端部5aの前方に存在する異物X1,X2に接触して当該異物X1,X2を検知するように構成されているが、異物X1,X2に接触して当該異物X1,X2を検知する機能は必ずしも備えなくてもよい。
・上記実施形態では、スライドモータ26の駆動力によりスイングドア6と隣接するスライドドア5をスライド移動させて車両2の左側側面に設けられた乗降口4を開閉する電動スライドドア装置1に本発明を具体化した。しかしながら、駆動モータの駆動力により開閉部材を移動させて開口部を開閉する開閉装置であって、開閉部材の閉作動時の前方側の端部と対向する開口部の周縁部が、該開閉部材と隣り合って設けられた隣接開閉部材にて構成される開閉装置であれば、上記実施形態の電動スライドドア装置1以外の開閉装置に本発明を具体化してもよい。