JP5344946B2 - 電動コンプレッサ制御装置 - Google Patents
電動コンプレッサ制御装置 Download PDFInfo
- Publication number
- JP5344946B2 JP5344946B2 JP2009027269A JP2009027269A JP5344946B2 JP 5344946 B2 JP5344946 B2 JP 5344946B2 JP 2009027269 A JP2009027269 A JP 2009027269A JP 2009027269 A JP2009027269 A JP 2009027269A JP 5344946 B2 JP5344946 B2 JP 5344946B2
- Authority
- JP
- Japan
- Prior art keywords
- motor
- speed
- torque
- electric compressor
- overload
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000001514 detection method Methods 0.000 claims description 8
- 230000007423 decrease Effects 0.000 abstract description 14
- 230000008859 change Effects 0.000 abstract description 4
- 230000009467 reduction Effects 0.000 abstract description 3
- 230000003247 decreasing effect Effects 0.000 description 8
- 239000003507 refrigerant Substances 0.000 description 8
- 239000004065 semiconductor Substances 0.000 description 4
- 238000000034 method Methods 0.000 description 3
- 230000001360 synchronised effect Effects 0.000 description 3
- 238000004378 air conditioning Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 239000002826 coolant Substances 0.000 description 1
- 230000006378 damage Effects 0.000 description 1
- 230000005284 excitation Effects 0.000 description 1
- 238000002474 experimental method Methods 0.000 description 1
- 230000004907 flux Effects 0.000 description 1
- 230000020169 heat generation Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000002265 prevention Effects 0.000 description 1
- 238000005057 refrigeration Methods 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
Images







Landscapes
- Control Of Ac Motors In General (AREA)
Description
電動コンプレッサはインバータで制御される3相モータが駆動源として用いられている。
インバータはバッテリからの直流電流をスイッチング半導体素子でスイッチングしてモータへの電流を出力するが、モータ負荷が大きくなりスイッチング半導体素子を流れる電流(相電流)がその最大定格電流を越えるとスイッチング半導体素子の発熱が増大して破壊へ進む。
これは、第1の閾値以上になったときにモータの回転を停止するだけでは、それまで機能していた空調機能が急に停止して乗員に不快感を与えるので、そのような事態に至る前段階でモータの回転数を減少させることにより、モータ負荷を軽減して電流が第1の閾値に達するのを抑えようと図ったものである。
そこで、従来のスイッチング半導体素子の保護と同様に、負荷に閾値を設定して脱調に至る限界を越えないようにすることが考えられる。
ここで、電動コンプレッサのモータにかかる負荷はコンプレッサの冷媒吸入口と吐出口の間に生じる圧力差に依存し、圧力差が大きければ負荷は大きく、圧力差が小さければ負荷も小さい。そして、モータの回転数が低下すれば冷媒流量も低下して、結果として負荷が小さくなるという相関関係にある。
したがって、上記従来技術に倣えば、負荷が閾値に達して過負荷と判定されたらモータの回転数を低下させることとすればよい。
このため、上記従来の技術における第2の閾値と同じく負荷の閾値が固定であると、モータの回転速度を減少させたあとオーバーシュートにより脱調限界を越えてしまうことがあり、この場合は、上記の意図にもかかわらず運転不能になる。
この対策として、大きな余裕をもたせるべく、閾値を低く設定することも考えられるが、これではモータの運転範囲が狭められてしまうという問題を招く。
指令速度補正部は、負荷判定部における判定が過負荷であるとき、モータ指令速度を減少させて最終指令速度とし、負荷判定部における判定が過負荷でないときはモータ指令速度をそのまま最終指令速度とし、閾値設定手段は、モータの回転速度が所定値以下の領域では、閾値をモータトルクの変動速度に応じて変化させ、閾値は、モータトルクの変動速度が小さいときは高く、変動速度が大きくなるほど低いことを特徴とする電動コンプレッサ制御装置とした。
図1は、車両用空調装置に適用した実施の形態にかかる電動コンプレッサ制御装置の全体構成を示すブロック図である。
電動コンプレッサ1は、コンプレッサ本体CompとモータMと、このモータMを駆動するインバータInvとからなり、モータMとしては、埋込磁石同期モータを用いている。
電動コンプレッサ1にはモータ電流を検出する電流検出部2とモータMの回転速度を検出する回転センサ3とが付設されている。
電流検出部2は、例えばインバータInvの電流経路に設けたシャント抵抗によって電流を電圧に変換し、この電圧値からモータMに流れる電流値を求める。
また、回転センサ3は、例えばモータMの回転軸に取り付けた不図示のエンコーダを用いて回転速度ωを求める。
電動コンプレッサ制御装置10はさらに、電流検出部2に接続されたモータトルク演算部15と、このモータトルク演算部15と回転センサ3とに接続された過負荷判定閾値設定部16と、モータトルク演算部15と過負荷判定閾値設定部16とに接続された負荷判定部17とを有している。
埋込磁石同期モータの駆動にはベクトル制御を用い、モータトルクTは次式で求められる。
T=Pn{Ψa・iq+(Ld−Lq)id・iq}
ただし、Pn:極対数
Ψa:鎖交磁束
Ld:D軸インダクタンス
Lq:Q軸インダクタンス
id:D軸電流(励磁電流成分)
iq:Q軸電流(トルク電流成分)
である。
負荷判定部17は、モータトルクTを過負荷判定閾値Tzと比較し、モータトルクTが過負荷判定閾値Tzに達したらモータMが過負荷状態であると判定する。
すなわち、モータMが過負荷状態であると判定された場合は、モータ指令速度を減少させて、過負荷状態の判定が解除されるまでこの補正された最終指令速度ωtをモータ制御部13へ出力する。モータMが過負荷状態でない場合は、モータ指令速度ωoを減少させる補正は行わなわず、モータ指令速度ωoをそのまま最終指令速度ωtとする。
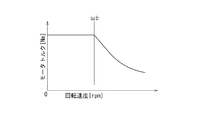
前述のように、モータMはその出力できる限界トルクTc以上の負荷がかけられると脱調し、停止してしまうが、一般に埋込磁石同期モータは、図2に示すようなトルク特性を有している。すなわち、所定の回転速度ωb以下の領域では限界トルクTcは一定で、ωbを越えた領域では限界トルクTcが急速に低下する。電動コンプレッサ1の駆動中は、モータMの出力するトルクTがコンプレッサの負荷となるので、負荷の変動はモータトルクTの変動で知ることができる。したがって、脱調防止のためには、上記の限界トルクTcに達する前に過負荷と判定するように閾値を設定し、当該閾値に達したときにモータMの回転速度を減少させる必要がある。
ここで、オーバーシュート量(トルクの増大量および時刻t0時のトルク値に戻るまでの時間)は、回転速度ωを減少させ始めた時刻t0直前のモータトルクTの変動速度(傾斜α)と関連しており、図4に示すように、モータトルクTの変動速度が大きいほどオーバーシュート量も大きいことが判明した。
そこで、本実施の形態では、過負荷判定閾値設定部16は、図2に示したトルク特性に加えてオーバーシュートの特性も踏まえた過負荷判定閾値Tzを設定するものとする。
過負荷判定閾値設定部16は、負荷変動算出部20、低速領域マップ22と高速領域マップ24、および速度領域切換スイッチ26を備える。
モータMのトルク特性は先の図2に示したように、限界トルクTcが一定である回転速度ωb以下の領域と、回転速度ωが増すにしたがって限界トルクTcが減少する領域に分かれるので、低速領域マップ22と高速領域マップ24はそれぞれの領域に対応している。
いずれのマップも、オーバーシュートがあってもモータトルクTが限界トルクTcを越えないようにあらかじめ実験などに基づいて設定される。
閾値Tlは、モータトルクTの変動速度が低い場合は高く、モータトルクTの変動速度が高くなるほど低くなっている。
負荷変動算出部20はモータトルクTの変動速度dT/dtを求め、過負荷判定閾値設定部16はこの変動速度に基づいて低速領域マップ22から閾値Tlを読み出す。
高速領域での閾値Thは限界トルクTcにほぼ沿っており、限界トルクTcとの差は低速領域マップにおける限界トルクTcと閾値Tlの差より小さくなっている。
過負荷判定閾値設定部16は回転センサ3からの回転速度ωに基づいて高速領域マップ24から閾値Thを読み出す。
速度領域切換スイッチ(速度領域切換SW)26は、回転速度ωb以下のときは低速領域選択状態となり低速領域マップ22から読み出した閾値Tlを過負荷判定閾値Tzとして負荷判定部17へ出力し、回転速度ωbを越えているときは高速領域選択状態となり高速領域マップ24から読み出した閾値Thを過負荷判定閾値Tzとして負荷判定部17へ出力する。
図6は電動コンプレッサ制御装置10の制御動作を示すフローチャートであり、電動コンプレッサ1の運転中、一定時間間隔で繰り返される。
まずステップ100において、モータ指令速度生成部11はエアコン設定温度と車室内温度を基にモータ指令速度ωoを生成する。
ステップ101では、モータトルク演算部15において、モータ電流id、iqを基にモータトルクTを算出する。
ステップ102において、過負荷判定閾値設定部16では速度領域切換スイッチ26に回転センサ3からの回転速度ωが読み込まれ、回転速度がωb以下であるかどうかがチェックされる。
回転速度がωb以下であるときはステップ103へ進み、回転速度がωbを越えているときはステップ105へ進む。
そしてステップ104において、過負荷判定閾値設定部16では負荷変動算出部20によりモータトルクTの変動速度dT/dtを求めるとともに、この変動速度に基づいて低速領域マップ22から閾値Tlを読み出して過負荷判定閾値Tzとする。この過負荷判定閾値Tzは低速領域選択側に切り換わった速度領域切換スイッチ26から負荷判定部17へ出力される。
そしてステップ106において、回転速度ωに基づいて高速領域マップ24から閾値Thを読み出して過負荷判定閾値Tzとする。この過負荷判定閾値Tzは高速領域選択側に切り換わった速度領域切換スイッチ26から負荷判定部17へ出力される。
ステップ108において、指令速度補正部12は判定信号により、負荷状態が過負荷であるかどうかをチェックする。
判定信号が過負荷でなく、すなわち安全負荷のときは、ステップ109へ進んで、先のステップ100で生成されたモータ指令速度ωoをそのまま最終指令速度ωtとしてモータ制御部13へ送る。
ステップ111では、モータ制御部13により、モータMの実際の回転速度ωが指令速度補正部12から送られた最終指令速度ωtとなるように、電動コンプレッサ1のインバータInvを駆動して、ステップ100へ戻る。
このため、図8に示すように、回転速度ω1の時点(限界トルクTc1)でモータトルクTが過負荷判定閾値Tz1に達して回転速度を減少させると、オーバーシュートは発生するが、低い値に減少した回転速度ω2における限界トルクTc2がTc1よりも高い値へ増大しているので、過負荷判定閾値TzがモータトルクTの変動速度に係わらず限界トルクTcに近い値に設定してあっても、オーバーシュートによって限界トルクTcを越えることはない。したがって、高速領域においては過負荷判定閾値Tzが高い分だけ広い運転範囲が確保されることになる。
これにより、電動コンプレッサ1の過負荷の判定基準である過負荷判定閾値TzがモータMの回転速度ωに応じて可変に設定されるので、負荷に対応するモータのトルク特性に合わせて、脱調を招く限界トルクTcに対して必要な余裕代だけ手前で回転速度を減少させればよく、脱調防止とともに、電動コンプレッサ1の運転範囲を拡大することができるので、モータの小型化、軽量化にもつながる。
とくに、モータトルクTの変動速度が小さいときは過負荷判定閾値Tzを高く、変動速度が大きくなるほど過負荷判定閾値Tzを低くすることにより、変動速度が小さいときは運転範囲が拡大する。
また、回転速度検出手段として回転センサ3を備える例を示したが、回転センサを用いる代わりに、速度センサレス制御によってもよい。
2 電流検出部
3 回転センサ
4 室内温度センサ
5 温度設定部
10 電動コンプレッサ制御装置
11 モータ指令速度生成部
12 指令速度補正部
13 モータ制御部
15 モータトルク演算部
16 過負荷判定閾値設定部
17 負荷判定部
20 負荷変動算出部
22 低速領域マップ
24 高速領域マップ
26 速度領域切換スイッチ
Comp コンプレッサ本体
Inv インバータ
M モータ
Claims (3)
- モータ指令速度を生成するモータ指令速度生成部(11)と、
モータが出力するモータトルクを算出するモータトルク演算部(15)と、
モータの回転速度を検出する回転速度検出手段(3)と、
モータの回転速度に応じて、電動コンプレッサの過負荷判定基準とする閾値を設定する閾値設定手段(16)と、
前記モータトルクを前記閾値と比較して電動コンプレッサの負荷状態を判定する負荷判定部(17)と、
電動コンプレッサ(1)の負荷状態に応じてモータ指令速度を補正し、最終指令速度を出力する指令速度補正部(12)と、
最終指令速度に基づいて電動コンプレッサのモータを駆動するモータ制御部(13)と、を有し、
前記指令速度補正部は、
負荷判定部における判定が過負荷であるとき、モータ指令速度を減少させて最終指令速度とし、
負荷判定部における判定が過負荷でないときはモータ指令速度をそのまま最終指令速度とし、
前記閾値設定手段(16)は、
モータの回転速度が所定値以下の領域では、前記閾値を前記モータトルクの変動速度に応じて変化させ、前記閾値は、前記モータトルクの変動速度が小さいときは高く、変動速度が大きくなるほど低いことを特徴とする電動コンプレッサ制御装置。 - 前記閾値設定手段(16)は、
モータの回転速度が前記所定値を越える領域では、前記閾値を前記モータトルクの変動速度と無関係にモータの回転速度に基づいて設定するものであることを特徴とする請求項1に記載の電動コンプレッサ制御装置。 - 前記所定値が、モータの限界トルクが一定の状態からモータの回転速度に応じて変化し
始める回転速度であり、
前記閾値はモータの限界トルクより低く設定され、
前記高速領域における前記閾値と限界トルクの差は、前記低速領域における前記閾値と
限界トルクの差よりも小さいことを特徴とする請求項1または2に記載の電動コンプレッ
サ制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009027269A JP5344946B2 (ja) | 2009-02-09 | 2009-02-09 | 電動コンプレッサ制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009027269A JP5344946B2 (ja) | 2009-02-09 | 2009-02-09 | 電動コンプレッサ制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010183796A JP2010183796A (ja) | 2010-08-19 |
| JP5344946B2 true JP5344946B2 (ja) | 2013-11-20 |
Family
ID=42764863
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009027269A Expired - Fee Related JP5344946B2 (ja) | 2009-02-09 | 2009-02-09 | 電動コンプレッサ制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5344946B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021115076A1 (zh) * | 2019-12-13 | 2021-06-17 | 中国科学院深圳先进技术研究院 | 一种电机功能安全控制方法及装置 |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015116024A (ja) * | 2013-12-11 | 2015-06-22 | カルソニックカンセイ株式会社 | 電動コンプレッサの制御装置 |
| US10033308B2 (en) | 2015-03-17 | 2018-07-24 | Intuitive Surgical Operations, Inc. | Systems and methods for motor torque compensation |
| CN110574284B (zh) * | 2017-04-28 | 2023-06-20 | 日本电产株式会社 | 马达驱动装置、马达驱动方法、记录介质以及发动机冷却装置 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02214489A (ja) * | 1989-02-10 | 1990-08-27 | Nippon Electric Ind Co Ltd | 誘導電動機の過負荷保護回路 |
| JP2836884B2 (ja) * | 1990-01-23 | 1998-12-14 | 株式会社日立製作所 | インバータ装置 |
| JPH09294396A (ja) * | 1996-04-24 | 1997-11-11 | Shinko Electric Co Ltd | 速度制御装置 |
| JP4720619B2 (ja) * | 2006-05-30 | 2011-07-13 | 株式会社明電舎 | モータの可変速駆動装置 |
| JP5235390B2 (ja) * | 2007-11-27 | 2013-07-10 | 三菱電機株式会社 | インバータ制御装置並びに空気調和装置 |
-
2009
- 2009-02-09 JP JP2009027269A patent/JP5344946B2/ja not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021115076A1 (zh) * | 2019-12-13 | 2021-06-17 | 中国科学院深圳先进技术研究院 | 一种电机功能安全控制方法及装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010183796A (ja) | 2010-08-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4259173B2 (ja) | 電動圧縮機の駆動装置 | |
| JP3506457B2 (ja) | 空気調和機におけるコンプレッサの起動制御方法 | |
| KR101392953B1 (ko) | 모터 구동 장치, 이를 구비한 공기 조화기, 및 모터 구동 방법 | |
| KR101550751B1 (ko) | 모터 제어 장치, 이를 이용한 모터 구동 장치, 압축기, 냉동 장치, 공기 조화기, 및 모터 제어 방법 | |
| US20100114379A1 (en) | Fan control system | |
| JP4300730B2 (ja) | 永久磁石電動機装置、冷凍サイクル装置、永久磁石電動機の駆動方法 | |
| US10458420B2 (en) | Method for controlling motor-driven compressor configured to be installed in vehicle | |
| JP2013192416A (ja) | モータ駆動装置、流体圧縮システム、及び空気調和機 | |
| JP5344946B2 (ja) | 電動コンプレッサ制御装置 | |
| JP3622666B2 (ja) | 同期モータ制御方法およびその装置 | |
| CN108800489A (zh) | 压缩机绕组加热的控制方法及装置 | |
| JP7023387B2 (ja) | モータ制御装置および空気調和装置 | |
| JP7044523B2 (ja) | モータ制御装置及びこれを備えた電動圧縮機、移動体用の空気調和機、モータ制御方法及びモータ制御プログラム | |
| JP6410939B2 (ja) | モータ制御装置、圧縮機、及び空気調和機 | |
| JP5752546B2 (ja) | モータ制御装置、圧縮機およびヒートポンプ装置 | |
| JP4804100B2 (ja) | モータ駆動装置及びその制御方法、空気調和装置 | |
| JP4131318B2 (ja) | 空調装置 | |
| JP2005207362A (ja) | 電動圧縮機の駆動装置 | |
| JP2014187802A (ja) | モータ駆動装置 | |
| JP6093606B2 (ja) | モータ駆動装置 | |
| JP7251496B2 (ja) | インバータ制御装置及び車載用流体機械 | |
| US20240171102A1 (en) | Electric motor | |
| JP2023136220A (ja) | 電動圧縮機 | |
| JP6886392B2 (ja) | モータ制御装置及び空気調和装置 | |
| JP4224915B2 (ja) | 空気調和機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110831 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130307 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130312 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130513 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130813 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130813 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5344946 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |