以下、本発明に係る研磨装置の実施形態について図1から図16を参照して詳細に説明する。なお、図1から図16において、同一または相当する構成要素には、同一の符号を付して重複した説明を省略する。
図1は、本発明の第1の実施形態における研磨装置10を示す模式図である。図1に示すように、研磨装置10は、研磨テーブル12と、支軸14の上端に連結されたトップリングヘッド16と、トップリングヘッド16の自由端に取り付けられたトップリングシャフト18と、トップリングシャフト18の下端に連結された略円盤状のトップリング20とを備えている。
研磨テーブル12は、テーブル軸12aを介してその下方に配置されるモータ(図示せず)に連結されており、そのテーブル軸12a周りに回転可能になっている。この研磨テーブル12の上面には研磨パッド22が貼付されており、研磨パッド22の表面22aが半導体ウェハWを研磨する研磨面を構成している。
なお、市場で入手できる研磨パッドとしては種々のものがあり、例えば、ロデール社製のSUBA800、IC−1000、IC−1000/SUBA400(二層クロス)、フジミインコーポレイテッド社製のSurfin xxx−5、Surfin 000等がある。SUBA800、Surfin xxx−5、Surfin 000は繊維をウレタン樹脂で固めた不織布であり、IC−1000は硬質の発泡ポリウレタン(単層)である。発泡ポリウレタンは、ポーラス(多孔質状)になっており、その表面に多数の微細なへこみまたは孔を有している。
トップリングシャフト18は、図示しないモータの駆動により回転するようになっている。このトップリングシャフト18の回転により、トップリング20がトップリングシャフト18周りに回転するようになっている。また、トップリングシャフト18は、上下動機構24によりトップリングヘッド16に対して上下動するようになっており、このトップリングシャフト18の上下動によりトップリング20がトップリングヘッド16に対して上下動するようになっている。なお、トップリングシャフト18の上端にはロータリージョイント25が取り付けられている。
トップリング20は、その下面に半導体ウェハWなどの基板を保持できるようになっている。トップリングヘッド16は支軸14を中心として旋回可能に構成されており、下面に半導体ウェハWを保持したトップリング20は、トップリングヘッド16の旋回により半導体ウェハWの受取位置から研磨テーブル12の上方に移動される。そして、トップリング20を下降させて半導体ウェハWを研磨パッド22の表面(研磨面)22aに押圧する。このとき、トップリング20および研磨テーブル12をそれぞれ回転させ、研磨テーブル12の上方に設けられた研磨液供給ノズル(図示せず)から研磨パッド22上に研磨液を供給する。このように、半導体ウェハWを研磨パッド22の研磨面22aに摺接させて半導体ウェハWの表面を研磨する。
トップリングシャフト18およびトップリング20を上下動させる上下動機構24は、軸受26を介してトップリングシャフト18を回転可能に支持するブリッジ28と、ブリッジ28に取り付けられたボールねじ32と、支柱30により支持された支持台29と、支持台29上に設けられたACサーボモータ38とを備えている。サーボモータ38を支持する支持台29は、支柱30を介してトップリングヘッド16に固定されている。
ボールねじ32は、サーボモータ38に連結されたねじ軸32aと、このねじ軸32aが螺合するナット32bとを備えている。トップリングシャフト18は、ブリッジ28と一体となって上下動するようになっている。したがって、サーボモータ38を駆動すると、ボールねじ32を介してブリッジ28が上下動し、これによりトップリングシャフト18およびトップリング20が上下動する。研磨装置10は、サーボモータ38をはじめとする装置内の各機器を制御する制御部47を備えている。
この研磨装置10は、研磨テーブル12の研磨面22aをドレッシングするドレッシングユニット40を備えている。このドレッシングユニット40は、研磨面22aに摺接されるドレッサ50と、ドレッサ50が連結されるドレッサシャフト51と、ドレッサシャフト51の上端に設けられたエアシリンダ53と、ドレッサシャフト51を回転自在に支持する揺動アーム55とを備えている。ドレッサ50の下部はドレッシング部材50aにより構成され、このドレッシング部材50aの下面には針状のダイヤモンド粒子が付着している。エアシリンダ53は、支柱56により支持された支持台57上に配置されており、これらの支柱56は揺動アーム55に固定されている。
揺動アーム55は図示しないモータに駆動されて、支軸58を中心として旋回するように構成されている。ドレッサシャフト51は、図示しないモータの駆動により回転し、このドレッサシャフト51の回転により、ドレッサ50がドレッサシャフト51周りに回転するようになっている。エアシリンダ53は、ドレッサシャフト51を介してドレッサ50を上下動させ、ドレッサ50を所定の押圧力で研磨パッド22の研磨面22aに押圧する。
研磨パッド22の研磨面22aのドレッシングは次のようにして行われる。ドレッサ50はエアシリンダ53により研磨面22aに押圧され、これと同時に図示しない純水供給ノズルから純水が研磨面22aに供給される。この状態で、ドレッサ50がドレッサシャフト51周りに回転し、ドレッシング部材50aの下面(ダイヤモンド粒子)を研磨面22aに摺接させる。このようにして、ドレッサ50により研磨パッド22が削り取られ、研磨面22aがドレッシングされる。
本実施形態の研磨装置10では、このドレッサ50を利用して研磨パッド22の摩耗量を測定する。すなわち、ドレッシングユニット40はドレッサ50の変位を測定する変位センサ(研磨パッド摩耗検知器)60を備えている。この変位センサ60は、揺動アーム55の上面に設けられている。ドレッサシャフト51にはターゲットプレート61が固定されており、ドレッサ50の上下動にともなって、ターゲットプレート61が上下動するようになっている。変位センサ60はこのターゲットプレート61を挿通するように配置されており、ターゲットプレート61の変位を測定することによりドレッサ50の変位を測定する。なお、変位センサ60としては、リニアスケール、レーザ式センサ、超音波センサ、もしくは渦電流式センサなどのあらゆるタイプのセンサが用いられる。
本実施形態では、次のようにして研磨パッド22の摩耗量が測定される。まず、エアシリンダ53を駆動させてドレッサ50を、未使用の研磨パッド22の研磨面22aに当接させる。この状態で、変位センサ60はドレッサ50の初期位置を測定し、その初期位置を制御部(演算部)47に保存する。そして、1つの、または複数の半導体ウェハWの研磨処理が終了した後、再びドレッサ50を研磨面22aに当接させ、この状態でドレッサ50の位置を測定する。ドレッサ50の位置は研磨パッド22の摩耗量に応じて下方に変位するため、制御部47は、上記初期位置と研磨後のドレッサ50の位置との差を求めることで、研磨パッド22の摩耗量を求めることができる。このようにして、ドレッサ50の位置に基づいて研磨パッド22の摩耗量が求められる。
制御部47では、研磨パッド22の総摩耗量と所定の設定値とが比較される。そして、研磨パッド22の総摩耗量が設定値に達した場合には、研磨パッド22の交換を促す信号が制御部47から発せられる。なお、1回(または複数回)の研磨工程当たりの研磨パッド22の摩耗量(削れ量)は制御部47に保存され、摩耗量の変化が制御部47により監視されるようになっている。この場合、研磨工程ごとの研磨パッド22の摩耗量を一定にするために、制御部47によりドレッサ50の操作レシピ(ドレッシング時間、ドレッサ50の回転速度、ドレッサ50の研磨パッド22に対する押圧力などのドレッシング条件)を変更するようにしてもよい。
制御部47は、研磨パッド22の摩耗量に基づいて、トップリング20と研磨パッド22の研磨面22aとの距離が一定となるようにサーボモータ38を制御する。すなわち、制御部47は、この研磨パッド22の摩耗量(研磨面22aの変位)から研磨時のトップリング20の最適な位置を算出し、この位置を記憶装置(図示せず)内に記憶する。そして、半導体ウェハWの研磨時には、図1に示す状態からサーボモータ38を駆動して、ブリッジ28および半導体ウェハWを保持したトップリング20を下降させる。このとき、制御部47によりサーボモータ38を制御して、トップリング20が上述した最適な位置に達したところでサーボモータ38を停止させる。この位置でトップリング20の下面に保持された半導体ウェハWが研磨パッド22に押圧され研磨される。
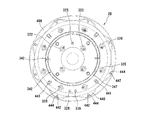
次に、上述した実施形態において好適に使用できるトップリング20についてより詳細に説明する。図2から図5は、このようなトップリング20の断面図であり、複数の半径方向に沿って切断した図である。図6は図2乃至図5に示す下部材の平面図である。
図2から図5に示すように、トップリング20は、半導体ウェハWを研磨面22aに対して押圧するトップリング本体200と、研磨面22aを直接押圧するリテーナリング302とから基本的に構成されている。トップリング本体200は、円盤状の上部材300と、上部材300の下面に取り付けられた中間部材304と、中間部材304の下面に取り付けられた下部材306とを備えている。リテーナリング302は、上部材300の外周部に取り付けられている。上部材300は、ボルト308によりトップリングシャフト18に連結されている。また、中間部材304は、ボルト(図示せず)を介して上部材300に固定されており、下部材306はボルト(図示せず)を介して上部材300に固定されている。上部材300、中間部材304、および下部材306から構成される本体部は、エンジニアリングプラスティック(例えば、PEEK)などの樹脂により形成されている。
下部材306の下面には、半導体ウェハの裏面に当接する弾性膜314が取り付けられている。この弾性膜314は、外周側に配置された環状のエッジホルダ316と、エッジホルダ316の内方に配置された環状のリプルホルダ318,319とによって下部材306の下面に取り付けられている。弾性膜314は、エチレンプロピレンゴム(EPDM)、ポリウレタンゴム、シリコンゴム等の強度および耐久性に優れたゴム材によって形成されている。
エッジホルダ316はリプルホルダ318により保持され、リプルホルダ318は複数のストッパ320により下部材306の下面に取り付けられている。リプルホルダ319は複数のストッパ322により下部材306の下面に取り付けられている。図6に示すように、ストッパ320およびストッパ322はトップリング20の円周方向に均等に設けられている。
図2に示すように、弾性膜314の中央部にはセンター室360が形成されている。リプルホルダ319には、このセンター室360に連通する流路324が形成されており、下部材306には、この流路324に連通する流路325が形成されている。リプルホルダ319の流路324および下部材306の流路325は、図示しない流体供給源に接続されており、加圧された流体が流路325および流路324を通ってセンター室360に供給されるようになっている。
リプルホルダ318は、弾性膜314のリプル314bおよびエッジ314cをそれぞれ爪部318b,318cで下部材306の下面に押さえつけるようになっており、リプルホルダ319は、弾性膜314のリプル314aを爪部319aで下部材306の下面に押さえつけるようになっている。
図3に示すように、弾性膜314のリプル314aとリプル314bとの間には環状のリプル室361が形成されている。弾性膜314のリプルホルダ318とリプルホルダ319との間には隙間314fが形成されており、下部材306にはこの隙間314fに連通する流路342が形成されている。また、中間部材304には、下部材306の流路342に連通する流路344が形成されている。下部材306の流路342と中間部材304の流路344との接続部分には、環状溝347が形成されている。この下部材306の流路342は、環状溝347および中間部材304の流路344を介して図示しない流体供給源に接続されており、加圧された流体がこれらの流路を通ってリプル室361に供給されるようになっている。また、この流路342は、図示しない真空ポンプにも切替可能に接続されており、真空ポンプの作動により弾性膜314の下面に半導体ウェハを吸着できるようになっている。
図4に示すように、リプルホルダ318には、弾性膜314のリプル314bおよびエッジ314cによって形成される環状のアウター室362に連通する流路326が形成されている。また、下部材306には、リプルホルダ318の流路326にコネクタ327を介して連通する流路328が、中間部材304には、下部材306の流路328に連通する流路329がそれぞれ形成されている。このリプルホルダ318の流路326は、下部材306の流路328および中間部材304の流路329を介して図示しない流体供給源に接続されており、加圧された流体がこれらの流路を通ってアウター室362に供給されるようになっている。
図5に示すように、エッジホルダ316は、弾性膜314のエッジ314dを押さえて下部材306の下面に保持するようになっている。このエッジホルダ316には、弾性膜314のエッジ314cおよびエッジ314dによって形成される環状のエッジ室363に連通する流路334が形成されている。また、下部材306には、エッジホルダ316の流路334に連通する流路336が、中間部材304には、下部材306の流路336に連通する流路338がそれぞれ形成されている。このエッジホルダ316の流路334は、下部材306の流路336および中間部材304の流路338を介して図示しない流体供給源に接続されており、加圧された流体がこれらの流路を通ってエッジ室363に供給されるようになっている。
このように、本実施形態におけるトップリング20においては、弾性膜314と下部材306との間に形成される圧力室、すなわち、センター室360、リプル室361、アウター室362、およびエッジ室363に供給する流体の圧力を調整することにより、半導体ウェハを研磨パッド22に押圧する押圧力を半導体ウェハの部分ごとに調整できるようになっている。
図7は図2に示すリテーナリングの拡大図である。リテーナリング302は半導体ウェハの外周縁を保持するものであり、図7に示すように、上部が閉塞された円筒状のシリンダ400と、シリンダ400の上部に取り付けられた保持部材402と、保持部材402によりシリンダ400内に保持される弾性膜404と、弾性膜404の下端部に接続されたピストン406と、ピストン406により下方に押圧されるリング部材408とを備えている。リング部材408の外周面とシリンダ400の下端との間には上下方向に伸縮自在な接続シート420が設けられている。この接続シート420は、リング部材408とシリンダ400との間の隙間を埋めることで研磨液(スラリー)の浸入を防止する役割を持っている。
弾性膜314のエッジ(外周縁)314dには、弾性膜314とリテーナリング302とを接続する、上方に屈曲した形状のシール部材422が形成されている。このシール部材422は弾性膜314とリング部材408との隙間を埋めるように配置されており、変形しやすい材料から形成されている。シール部材422は、トップリング本体200とリテーナリング302との相対移動を許容しつつ、弾性膜314とリテーナリング302との隙間に研磨液が浸入してしまうことを防止するために設けられている。本実施形態では、シール部材422は弾性膜314のエッジ314dに一体的に形成されており、断面U字型の形状を有している。
ここで、接続シート420やシール部材422を設けない場合は、研磨液がトップリング20内に浸入してしまい、トップリング20を構成するトップリング本体200やリテーナリング302の正常な動作を阻害してしまう。本実施形態によれば、接続シート420やシール部材422によって研磨液のトップリング20への浸入を防止することができ、これによりトップリング20を正常に動作させることができる。なお、弾性膜404、接続シート420、およびシール部材422は、エチレンプロピレンゴム(EPDM)、ポリウレタンゴム、シリコンゴム等の強度および耐久性に優れたゴム材によって形成されている。
リング部材408は、ピストン406に当接する上リング部材408aと、研磨面22aに接触する下リング部材408bとに分割されている。この上リング部材408aの外周面および下リング部材408bの外周面には、周方向に延びるフランジ部がそれぞれ形成されている。これらのフランジ部はクランプ430により把持されており、これにより上リング部材408aと下リング部材408bとが締結されている。図8は図7に示すクランプ430の平面図である。このクランプ430はたわみやすい材料から構成されている。クランプ430の初期形状はほぼ直線状であり、クランプ430をリング部材408のフランジ部に取り付けることにより、図8に示すような一部に切り欠きが形成された略環状となる。
図9(a)はクランプ430の他の構成例を示す図である。この例では、硬質の材料から形成された複数のクランプ430が使用される(図9(a)では1つのクランプのみを示す)。上リング部材408aおよび下リング部材408bの外周面には、外側に突出する複数のフランジ部431a,431bがそれぞれ形成されている。クランプ430はリング部材408の外周面に沿ってカーブした形状を有している。
このクランプ430は次のようにしてリング部材408に取り付けられる。まず、フランジ部431a,431bの位置が一致するように上リング部材408aと下リング部材408bとを重ね合わせる。次に、隣接するフランジ部の間の隙間にクランプ430を位置させる。そして、クランプ430を横方向にスライドさせ、フランジ部431a,431bをクランプ430により把持させる。これにより上リング部材408aと下リング部材408bとがクランプ430により締結される。この例では、図9(b)に示すように、接続シート420の内周面に、上記フランジ部間の隙間に嵌合する複数の突起部420aが形成されている。これらの突起部420aがフランジ部の間の隙間に嵌合するように接続シート420がリング部材408に取り付けられ、これによりクランプ430の位置が固定される。
図7に示すように、保持部材402には、弾性膜404によって形成される室410に連通する流路412が形成されている。また、シリンダ400の上部には、保持部材402の流路412に連通する流路414が形成され、上部材300には、シリンダ400の流路414に連通する流路416が形成されている。この保持部材402の流路412は、シリンダ400の流路414および上部材300の流路416を介して図示しない流体供給源に接続されており、加圧された流体がこれらの流路を通って室410に供給されるようになっている。したがって、室410に供給する流体の圧力を調整することにより、弾性膜404を伸縮させてピストン406を上下動させ、リテーナリング302のリング部材408を所望の圧力で研磨パッド22に押圧することができる。
図示した例では、弾性膜404としてローリングダイヤフラムを用いている。ローリングダイヤフラムは、屈曲した部分をもつ弾性膜からなるもので、ローリングダイヤフラムで仕切る室の内部圧力の変化等により、その屈曲部が転動することにより室の空間を広げることができるものである。室が広がる際にダイヤフラムが外側の部材と摺動せず、ほとんど伸縮しないため、摺動摩擦が極めて少なくてすみ、ダイヤフラムを長寿命化することができ、また、リテーナリング302が研磨パッド22に与える押圧力を精度よく調整することができるという利点がある。
このような構成により、リテーナリング302のリング部材408だけを下降させることができる。したがって、リテーナリング302のリング部材408が摩耗しても、下部材306と研磨パッド22との距離を一定に維持することが可能となる。また、研磨パッド22に接触するリング部材408とシリンダ400とは変形自在な弾性膜404で接続されているため、荷重点のオフセットによる曲げモーメントが発生しない。このため、リテーナリング302による面圧を均一にすることができ、研磨パッド22に対する追従性も向上する。
図6および図7に示すように、上リング部材408aの内側面には縦方向に延びるV字状溝418が均等に複数形成されている。また、下部材306の外周部には、外方に突出する複数のピン349が設けられており、このピン349がリング部材408のV字状溝418に係合するようになっている。V字状溝418内でリング部材408とピン349が相対的に上下方向にスライド可能になっているとともに、このピン349により上部材300および下部材306を介してトップリング本体200の回転がリテーナリング302に伝達され、トップリング本体200とリテーナリング302は一体となって回転する。このような構成により、弾性膜(ローリングダイヤフラム)404のねじれを防止し、研磨中にリング部材408を研磨面22aに対して円滑に均一に押圧することができる。また弾性膜の寿命を長くすることができる。
上記した構成例では、トップリング本体200に設けられたピン349がリテーナリング302のV字状溝418に係合することでトップリング本体200の回転がリテーナリング302に伝達される。このため、ピン349がV字状溝418に擦れてV字状溝418の表面に凹部が形成されてしまうことがある。このような凹部はピン349を強制的に位置決めしてしまい、結果としてリテーナリング302の動きが不安定となるおそれがある。図10及び図11はこのような不都合を防止することができるトップリングの部分断面図である。
図10はトップリングの他の構成例を示す部分断面図であり、図11はこの構成例における下部材の平面図である。図10及び図11に示すように、トップリング本体200の下部材306には、環状のシート部材440がピン441により固定されている。このシート部材440の外周部には複数のスライドリング444が等間隔に取り付けられている。リテーナリング302の上リング部材408aには、上下方向に延びる複数のドライブピン442が等間隔に設けられている。これらのドライブピン442はスライドリング444にそれぞれスライド可能に嵌合されている。トップリング本体200の回転は、シート部材440、スライドリング444、およびドライブピン442を介してリテーナリング302に伝達され、トップリング本体200とリテーナリング302とは一体となって回転する。
この構成例では、ドライブピン442とスライドリング444との接触面積が大きいため、ドライブピン442およびスライドリング444の減耗を防止することができる。したがって、リング部材408は自由に上下動することができ、リテーナリング302の正常な動作を確保することができる。なお、シート部材440の材料にはゴムが好適に使用される。ゴム製のシート部材440を用いることにより、トップリング本体200とリテーナリング302との間で伝達される振動を減衰させることができる。
弾性膜314のセンター室360、リプル室361、アウター室362、およびエッジ室363に供給する圧力により半導体ウェハに対する押圧力を制御するので、研磨中には下部材306は研磨パッド22から上方に離れた位置にする必要がある。しかしながら、リテーナリング302が摩耗すると、半導体ウェハと下部材306との間の距離が変化し、弾性膜314の変形の仕方も変わるため、半導体ウェハに対する面圧分布も変化することになる。このような面圧分布の変化は、プロファイルが不安定になる要因となっていた。
本実施形態では、リテーナリング302を下部材306とは独立して上下動させることができるので、リテーナリング302のリング部材408が摩耗しても、半導体ウェハと下部材306との間の距離を一定に維持することができる。したがって、研磨後の半導体ウェハのプロファイルを安定化させることができる。
なお、上述した例では、半導体ウェハの略全面に弾性膜314が配置されているが、これに限られるものではなく、弾性膜314は半導体ウェハの少なくとも一部に当接するものであればよい。
研磨が行われている間、リテーナリング302は研磨面22aと摺接するため、リテーナリング302(下リング部材408b)が徐々に摩耗する。リテーナリング302の摩耗がある程度進むと、リング部材408を研磨面22aに対して所望の押圧力で押圧することができなくなり、結果として半導体ウェハのプロファイルが変化してしまう。そこで、本実施形態では、プッシャに設けられたリテーナリング摩耗検知器を用いてリテーナリング302の摩耗量を測定する。
図12はリテーナリング摩耗検知器が組み込まれたプッシャを示す図である。図12に示すように、プッシャ500は、半導体ウェハを押し上げて該半導体ウェハをトップリング本体200の弾性膜314に保持させるプッシュステージ510と、トップリング20とプッシャ500との芯出しを行うリテーナリングガイド515と、プッシュステージ510を上下動させる第1のエアシリンダ518と、プッシュステージ510およびリテーナリングガイド515を上下動させる第2のエアシリンダ519とを備えている。
第1のエアシリンダ518は第1の垂直軸521を介してプッシュステージ510に連結され、第2のエアシリンダ519は第2の垂直軸522を介して第1のエアシリンダ518に連結されている。第1の垂直軸521は、ハウジング525に収容されたスライドガイド526によりスライド可能に支持されている。リテーナリングガイド515はスプリング530を介して第1の垂直軸521に支持されている。リテーナリングガイド515の上端面にはリテーナリング302のリング部材408の下面と接触するくぼみ部515aが形成されている。第2のエアシリンダ519を駆動させてリテーナリングガイド515およびプッシュステージ510を持ち上げると、リング部材408の下部がくぼみ部515aに嵌合され、これによりトップリング20とプッシャ500との芯出しが行われる。このとき、スプリング530はリテーナリングガイド515により下方に押圧され、トップリング20とプッシャ500との接触による衝撃をスプリング530が吸収するようになっている。
リテーナリングガイド515には渦電流センサ(リテーナリング摩耗検知器)540が取り付けられている。また、プッシュステージ510には、渦電流センサ540に対向するように金属製のターゲットプレート541が取り付けられている。この渦電流センサ540はターゲットプレート541を介してプッシュステージ510とリテーナリングガイド515との距離を測定するものである。なお、リテーナリング摩耗検知器としては渦電流センサに限らず、リニアスケール、レーザ式センサ、超音波センサなどのあらゆるタイプの測距センサを用いることができる。
トップリング20とプッシャ500との間には、半導体ウェハWを搬送する2つのリニアトランスポータ550,560と、これらのリニアトランスポータ550,560にそれぞれ保持されたウェハトレー570,580とが配置されている。上述したプッシュステージ510は、これらのウェハトレー570,580を介して半導体ウェハのロードおよびアンロードを行う。リニアトランスポータ550,560は研磨装置と図示しない搬送ロボットとの間で半導体ウェハWを搬送するものであり、水平に移動するように構成されている。ロード用のリニアトランスポータ550はアンロード用のリニアトランスポータ560よりも上方に配置される。なお、図12では、リニアトランスポータ550とリニアトランスポータ560とが上下に整列しているが、実際には、リニアトランスポータ550とリニアトランスポータ560とは互いにすれ違うように平行に移動するようになっている。
半導体ウェハのロード時には、プッシュステージ510は、半導体ウェハWが載置されたウェハトレー570を押し上げてトップリング20に半導体ウェハWを保持させる。また、半導体ウェハWのアンロード時には、プッシュステージ510はウェハトレー580を押し上げ、トップリング20からリリースされる半導体ウェハWをウェハトレー580上に載置させる。なお、プッシャ500は研磨テーブル12(図1参照)の側方に配置されており、半導体ウェハの受け渡し時には、支軸14を回転させてトップリング20をプッシャ500の上方に移動させる。
ここで、図12から図16を参照してプッシャの動作について説明する。まず、リニアトランスポータ550を移動させて、研磨すべき半導体ウェハWが載置されたウェハトレー570をプッシャ500の上方に移動させる(図13参照)。次に、第2のエアシリンダ519を駆動させて第1のエアシリンダ518、プッシュステージ510、およびリテーナリングガイド515を上昇させ、リテーナリングガイド515をリング部材408の下面に当接させる(図14参照)。さらに、第1のエアシリンダ518を駆動させ、プッシュステージ510を上昇させてウェハトレー570を半導体ウェハWとともに押し上げ、半導体ウェハWをトップリング20に保持(吸着)させる(図15参照)。その後、トップリング20は研磨テーブル12の上方に移動し、半導体ウェハWの研磨を行う。
研磨終了後、支軸14を回転させてトップリング20をプッシャ500の上方に再び移動させる。このとき、リニアトランスポータ560を移動させて、ウェハトレー580をプッシャ500の上方に移動させる。次に、第2のエアシリンダ519を駆動させて第1のエアシリンダ518、プッシュステージ510、およびリテーナリングガイド515を上昇させ、リテーナリングガイド515をリング部材408の下面に当接させる。この状態で、研磨された半導体ウェハWをトップリング20からリリースさせ、ウェハトレー580の上に載置させる(図16参照)。そして、第2のエアシリンダ519を駆動してプッシュステージ510およびリテーナリングガイド515を下降させる。その後、リニアトランスポータ560が移動して、研磨された半導体ウェハWを図示しない搬送ロボットに搬送する。
リテーナリングガイド515がリング部材408の下面に当接しているとき(図14および図16参照)、スプリング530により支持されているリテーナリングガイド515の位置はリング部材408の摩耗量に応じて変化する。一方、プッシュステージ510は第1の垂直軸521に固定されているのでその位置は常に一定である。制御部47は、渦電流センサ540により測定されたリテーナリングガイド515とプッシュステージ510との距離と基準値(初期距離)とを比較することにより、リング部材408(リテーナリング302)の摩耗量を測定する。なお、リテーナリングガイド515をリテーナリング302に当接させた状態において、プッシュステージ510を昇降させたときの、渦電流センサ540の測定値の変化量(プッシュステージ510の移動距離)から、リング部材408(リテーナリング302)の摩耗量を測ることもできる。すなわち、渦電流センサ540の測定値の変化量とリング部材408の摩耗量との相関関係を示すデータを予め制御部47に入力しておき、渦電流センサ540の測定値の変化量からリング部材408の摩耗量を測ることができる。
従来では、研磨テーブルに埋設された渦電流センサにより、リテーナリングに埋設された金属製のターゲットの位置を検知することでリテーナリングの摩耗量を測定することが行われていた。しかしながら、このような方法では、渦電流センサとターゲットとの間に研磨パッドが存在するため、研磨パッドの摩耗を考慮する必要があり、正確な摩耗量を測定することが困難であった。本実施形態によれば、渦電流センサ540の測定値が研磨パッドやその他の部材に影響されることがないので、リング部材408の摩耗量を正確に測定することができる。
リング部材408の摩耗量は、半導体ウェハのロード時及び/又はアンロード時に測定される。そして、リング部材408の総摩耗量が所定の値に達したときに、制御部47からリング部材408の交換を促す信号が発せられる。制御部47には、1回の、または複数回の研磨工程当たりの摩耗量が記録されるようになっており、摩耗量の推移(変化)が制御部47によって監視されるようになっている。そして、制御部47は、1回の、または複数回の研磨工程で摩耗するリング部材408の摩耗量が所定のしきい値を超えたときに、研磨工程が正常に行われていないと判断するようになっている。以下、この原理について説明する。
リング部材408の摩耗量は、リング部材408に作用する押圧力(室410の内部圧力)、研磨液に含まれる主成分の濃度、研磨液中の砥粒の濃度、研磨液の流量など各種要素に依存する。これらの要素が変わらない限り、1回の研磨工程ごとにリング部材408(リテーナリング302)が摩耗する量はほぼ一定である。したがって、研磨工程当たりのリング部材408の摩耗量が所定のしきい値以上に変化した場合には、正しい研磨工程が行われていないということが分かる。この場合、例えば、室410の内部圧力、研磨液の流量が所定の値に維持されているのであれば、研磨液の成分または砥粒の濃度が正しくないと推測することができる。このように、複数のセンサを用いることで研磨工程が正しく行われていないことの原因を特定することも可能である。
さらにリング部材408の摩耗量と半導体ウェハの研磨プロファイルとの相関を研磨特性データ(相関データ)として予め制御部47にて保有することで、この相関データに基づいて、研磨中にリング部材408の押圧力を制御部47にて制御することができる。例えばリング部材408の研磨工程ごとの削れ量が少なくなってきた場合、リング部材408の総摩耗量が大きくなったため、今までと同じ押圧力でリング部材408を研磨パッド22に押圧しても研磨パッド22に充分な圧力が加えられないと考えられる。このような場合は、制御部47によってリング部材408の押圧力を上記相関データを基にして計算した値に調整することが好ましい。これにより、リング部材408の寿命を延ばすことができる。
また、研磨工程が開始される前に研磨シミュレーションを予め行うようにしてもよい。この場合は、研磨シミュレーションの結果と目標とする研磨プロファイルのデータに基づいて、リング部材408の押圧力と、センター室360、リプル室361、アウター室362、およびエッジ室363のそれぞれの内部圧力を調整することで、好適な研磨プロファイルを得ることができる。
また、リング部材408の摩耗量のほかに、研磨パッド22の摩耗量の変化を監視することによっても、研磨工程が正常に行われているか否かを判断することができる。すなわち、研磨液の流量などの研磨条件が変わらない限り、1回の研磨工程当たりの研磨パッド22の摩耗量はほぼ一定であるため、研磨パッド22の摩耗量の変化を捉えることにより研磨条件の変化を検知することができる。この場合も、制御部47は、1回の、または複数回の研磨工程で摩耗する研磨パッド22の摩耗量が所定のしきい値(例えば、予め設定された第1のしきい値)以上となったときに、研磨工程が正常に行われていないと判断する。また、リング部材408の摩耗量に応じたレシピ(トップリング20の回転速度やリング部材408の押圧力などの研磨条件)を予め設定しておき、制御部47からの指令によりレシピを変更してもよい。こうすることによりリング部材408の寿命を延ばすことができる。
ドレッサ50は、その下面に付着された針状のダイヤモンド粒子を研磨パッド22に摺接させることで研磨面22aを削り取るため、経時的にダイヤモンド粒子が摩耗する。ダイヤモンド粒子がある程度摩耗すると、研磨面22aの好ましい表面粗さが得られない。その結果、研磨面22aに保持される砥粒の量が少なくなり、正常な研磨工程を行うことができなくなる。そこで、本実施形態では、次のような方法でダイヤモンド粒子の摩耗量を測定する。
単位時間当たりにドレッサ50により削り取られる研磨パッド22の量(以下、カットレートという)は、ドレッサ50の研磨面22aに対する押圧力、およびダイヤモンド粒子の形状に依存する。したがって、ドレッサ50の押圧力が一定の条件下では、ダイヤモンド粒子が摩耗するにしたがって、カットレートが少なくなる。本実施形態では、上述した変位センサ60を用いて、カットレート(すなわち、単位時間当たりの研磨面22aの変位)が測定される。
制御部47では、変位センサ60からの出力信号(測定値)に基づき、研磨パッド22のカットレート、すなわち、単位時間当たりの研磨面22aの変位(研磨パッド22の摩耗量)が算出される。制御部47には、カットレートとドレッサ50(すなわちダイヤモンド粒子)の摩耗量との相関関係を示すデータが予め入力されている。そして、制御部47は、このデータからドレッサ50の摩耗量を算出し、ドレッサ50の総摩耗量が所定の値に達したときにドレッサ50の交換を促す信号を発する。このように、変位センサ60は、ドレッサ50の摩耗を検知するドレッサ摩耗検知器としても機能する。
上述したように、ダイヤモンド粒子が摩耗すると、研磨面22aに保持される砥粒の量が少なくなり、研磨工程ごとのリテーナリング302(リング部材408)の摩耗量(削れ量)が少なくなると予想される。したがって、一回の、または複数回の研磨工程当たりのリテーナリング302の摩耗量が所定のしきい値(例えば、予め設定された第2のしきい値)以下である場合は、制御部47により研磨工程が正常に行われていないと判断することができる。なお、ドレッサ50の摩耗量に応じて、制御部47によりドレッサ50の操作レシピ(ドレッシング時間、ドレッサ50の回転速度、ドレッサ50の研磨パッド22に対する押圧力などのドレッシング条件)を変更するようにしてもよい。
上述したように、リング部材408、研磨パッド22、およびドレッサ50などの摩耗部材の摩耗量を検出しつつ、摩耗量の時間的変化を検知することによって次に列挙する効果を得ることができる。
1)各摩耗部材の寿命の検知、交換時期の予測、交換時期の検出、摩耗部材の長寿命化。2)各摩耗部材の摩耗量と研磨プロファイルとの相関関係を示す相関データを蓄積することによって、研磨条件(摩耗部材の押圧条件、トップリングの各圧力室の内部圧力、研磨液の条件(温度、pHなど)、トップリングの回転速度、研磨テーブルの回転速度、基板と研磨パッドとの相対速度)を好適に制御する。
3)研磨異常やプロセス異常の検知。
これまで本発明の一実施形態について説明したが、本発明は上述の実施形態に限定されず、その技術的思想の範囲内において種々異なる形態にて実施されてよいことは言うまでもない。