JP5260369B2 - 分散システム - Google Patents
分散システム Download PDFInfo
- Publication number
- JP5260369B2 JP5260369B2 JP2009067237A JP2009067237A JP5260369B2 JP 5260369 B2 JP5260369 B2 JP 5260369B2 JP 2009067237 A JP2009067237 A JP 2009067237A JP 2009067237 A JP2009067237 A JP 2009067237A JP 5260369 B2 JP5260369 B2 JP 5260369B2
- Authority
- JP
- Japan
- Prior art keywords
- state
- node
- system state
- nodes
- ecu
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images













Description
11 CPU
12 メインメモリ
13 I/F
14 記憶装置
100 ネットワーク
Claims (1)
- 複数のノードがネットワークを介して接続される分散システムにおいて、
前記複数のノードの各々は、
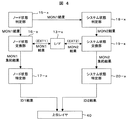
前記ネットワークの通信状態又は通信データから各ノードの障害の有無を示すノード状態を判定するノード状態判定部と、
前記ノード状態判定部によるノード判定結果を、前記ノード間で前記ネットワークを介した送受信により交換するノード状態交換部と、
前記ノード状態交換部が集約したノード状態判定結果から前記ノード状態を特定するノード状態特定部と、
前記複数のノードの制御モードを示すシステム状態を判定するシステム状態判定部と、
前記システム状態判定部によるシステム状態判定結果を、前記ノード間で前記ネットワークを介した送受信により交換するシステム状態交換部と、
前記状態交換部が集約したシステム状態判定結果からシステム状態を特定するシステム状態特定部と、を備え、
前記システム状態判定部は、システム状態を判定するための入力として、前記ノード状態特定部によるノード状態特定結果を利用することを特徴とする分散システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009067237A JP5260369B2 (ja) | 2009-03-19 | 2009-03-19 | 分散システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009067237A JP5260369B2 (ja) | 2009-03-19 | 2009-03-19 | 分散システム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2010220141A JP2010220141A (ja) | 2010-09-30 |
| JP2010220141A5 JP2010220141A5 (ja) | 2011-04-21 |
| JP5260369B2 true JP5260369B2 (ja) | 2013-08-14 |
Family
ID=42978446
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009067237A Active JP5260369B2 (ja) | 2009-03-19 | 2009-03-19 | 分散システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5260369B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5651442B2 (ja) * | 2010-11-29 | 2015-01-14 | 矢崎総業株式会社 | 動作支援装置、電子機器、電子制御装置、及び、制御システム |
| EP3443432A4 (en) * | 2016-04-12 | 2020-04-01 | Guardknox Cyber Technologies Ltd. | SPECIALLY PROGRAMMED COMPUTER SYSTEMS WITH ASSOCIATED DEVICES CONFIGURED TO IMPLEMENT SECURE LOCKINGS AND METHODS OF USING THEM |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000022698A (ja) * | 1998-06-30 | 2000-01-21 | Yazaki Corp | 車両ネットワークシステム及び車両機器状態制御方法 |
| JP4871687B2 (ja) * | 2005-10-03 | 2012-02-08 | 日立オートモティブシステムズ株式会社 | 車両制御システム |
| JP2008097164A (ja) * | 2006-10-10 | 2008-04-24 | Hitachi Ltd | 複数の機能要素から構成されるシステムの故障監視方法 |
-
2009
- 2009-03-19 JP JP2009067237A patent/JP5260369B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010220141A (ja) | 2010-09-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9934111B2 (en) | Control and data transmission system, process device, and method for redundant process control with decentralized redundancy | |
| JP2005302024A (ja) | アービトレーション方法、システム、およびプログラム記憶装置(出力インターロック機能および自動切り替え機能による冗長コントローラのためのアービトレーション方法およびシステム) | |
| WO2015166953A1 (ja) | 設計支援装置、設計支援方法およびプログラム | |
| EP2984528B1 (en) | Control of aircraft systems with at least two remote data concentrators for control of an aircraft system component | |
| CN104570721A (zh) | 冗余控制器主从状态确定方法 | |
| US10592356B2 (en) | Microcontroller and electronic control unit | |
| JP5260369B2 (ja) | 分散システム | |
| WO2018163665A1 (ja) | 制御装置および制御方法 | |
| JP7023722B2 (ja) | 二重化制御システム | |
| JP4993208B2 (ja) | 産業用コントローラ用機器 | |
| JP4899615B2 (ja) | 二重化プログラマブルコントローラの等値化方式 | |
| JP2003296133A (ja) | コントローラ | |
| CN109491842B (zh) | 用于故障安全计算系统的模块扩展的信号配对 | |
| CN113741166B (zh) | 一种基于多cpu工业系统控制器的工控逻辑冗余实现方法 | |
| KR20140092132A (ko) | 알티오에스 마이컴의 오에스 태스크의 모니터링 방법 | |
| JP5575086B2 (ja) | 電子制御装置 | |
| JP2009259134A (ja) | 安全plc | |
| JP4613019B2 (ja) | コンピュータシステム | |
| JPH1091603A (ja) | デュアルcpuシステムにおける立ち上げ同期確立方法及び異常監視方法 | |
| JP2998804B2 (ja) | マルチマイクロプロセッサシステム | |
| JP6024604B2 (ja) | 通信装置 | |
| JPH11175108A (ja) | 二重化コンピュータ装置 | |
| JP2016009499A (ja) | 相互接続を管理する方法およびシステム | |
| JP2005148890A (ja) | プロセッサ監視装置 | |
| JP2023525457A (ja) | 自律走行する車両、またはロボットの制御 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110209 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110209 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110209 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120615 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120626 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120824 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121113 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130402 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130425 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160502 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5260369 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |