JP5260235B2 - 移動体が既定方向に移動中かどうかを決定するための方法および装置 - Google Patents
移動体が既定方向に移動中かどうかを決定するための方法および装置 Download PDFInfo
- Publication number
- JP5260235B2 JP5260235B2 JP2008287284A JP2008287284A JP5260235B2 JP 5260235 B2 JP5260235 B2 JP 5260235B2 JP 2008287284 A JP2008287284 A JP 2008287284A JP 2008287284 A JP2008287284 A JP 2008287284A JP 5260235 B2 JP5260235 B2 JP 5260235B2
- Authority
- JP
- Japan
- Prior art keywords
- distance
- moving
- predetermined direction
- line
- moving body
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images













Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/0284—Relative positioning
- G01S5/0289—Relative positioning of multiple transceivers, e.g. in ad hoc networks
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P13/00—Indicating or recording presence, absence, or direction, of movement
- G01P13/02—Indicating direction only, e.g. by weather vane
- G01P13/04—Indicating positive or negative direction of a linear movement or clockwise or anti-clockwise direction of a rotational movement
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/0294—Trajectory determination or predictive filtering, e.g. target tracking or Kalman filtering
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0967—Systems involving transmission of highway information, e.g. weather, speed limits
- G08G1/096708—Systems involving transmission of highway information, e.g. weather, speed limits where the received information might be used to generate an automatic action on the vehicle control
- G08G1/096716—Systems involving transmission of highway information, e.g. weather, speed limits where the received information might be used to generate an automatic action on the vehicle control where the received information does not generate an automatic action on the vehicle control
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0967—Systems involving transmission of highway information, e.g. weather, speed limits
- G08G1/096733—Systems involving transmission of highway information, e.g. weather, speed limits where a selection of the information might take place
- G08G1/09675—Systems involving transmission of highway information, e.g. weather, speed limits where a selection of the information might take place where a selection from the received information takes place in the vehicle
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0967—Systems involving transmission of highway information, e.g. weather, speed limits
- G08G1/096766—Systems involving transmission of highway information, e.g. weather, speed limits where the system is characterised by the origin of the information transmission
- G08G1/096783—Systems involving transmission of highway information, e.g. weather, speed limits where the system is characterised by the origin of the information transmission where the origin of the information is a roadside individual element
Description

移動体が既定方向に移動中であると決定される。
移動体が既定方向に移動中であると決定するための手段1416を含む。
Claims (6)
- 位置決め手段と受信手段とを備えた移動体が、関与ポイントの位置に対して既定方向に移動中かどうかを決定するための方法であって、
関与ポイント位置と、前記既定方向に従って選択される基準ポイント位置と、を他の装置から受信する工程と、
第一の時点に於ける前記移動体の第一の位置を取得する工程と、
第二の時点に於ける前記移動体の第二の位置を取得する工程と、
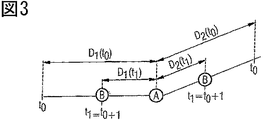
前記移動体の前記第一の位置と前記関与ポイント位置とを結ぶ第一の線とその距離を求める工程と、
前記移動体の前記第二の位置と前記関与ポイント位置とを結ぶ第三の線とその距離を求める工程と、
前記移動体の前記第一の位置と前記基準ポイント位置とを結ぶ第二の線とその距離を求める工程と、
前記移動体の前記第二の位置と前記基準ポイント位置とを結ぶ第四の線とその距離を求める工程と、
前記第一の線の距離>前記第三の線の距離、かつ
前記第二の線の距離>前記第四の線の距離ならば、
前記移動体が前記既定方向に移動中であると、決定する工程と、を含む
ことを特徴とする移動体が既定方向に移動中かどうかを決定するための方法。 - 請求項1に記載の、移動体が既定方向に移動中かどうかを決定するための方法であって、さらに、
前記関与ポイント位置と前記基準ポイント位置とを結ぶ基準線とその距離を求める工程と、
前記基準線と、当該移動体の位置と前記基準ポイント位置とを結ぶ線と、の角度、または、
前記第一の線と、前記第二の線と、の角度、または、
前記第三の線と、前記第四の線と、の角度、
に基づく検証データを求める工程と、
前記それぞれの検証データの角度と、既定値と、の比較に基づき、前記移動体が前記既定方向に移動中かどうかを検証する工程と、を備える
ことを特徴とする移動体が既定方向に移動中かどうかを決定するための方法。 - 請求項2に記載の、移動体が既定方向に移動中かどうかを決定するための方法であって、さらに、
前記第一の線の距離>前記第三の線の距離、かつ、
前記第二の線の距離>前記第四の線の距離、かつ
((前記基準線の距離)2−(前記第三の線の距離)2+(前記第四の線の距離)2)/(2*前記基準線の距離*前記第四の線の距離)>前記既定値、
であれば、前記移動体は、既定方向に移動中であると決定する工程を備える
ことを特徴とする移動体が既定方向に移動中かどうかを決定するための方法。 - 請求項2に記載の、移動体が既定方向に移動中かどうかを決定するための方法であって、さらに、
前記第一の距離>前記第三の距離、かつ、
前記第二の距離>前記第四の距離、かつ、
((前記第三の線の距離)2−(前記基準線の距離)2+(前記第四の線の距離)2)/(2*前記第三の線の距離*前記第四の線の距離)>前記既定値、
であれば、前記移動体は前記既定方向に移動中であると決定する工程を備える
ことを特徴とする移動体が既定方向に移動中かどうかを決定するための方法。 - 請求項1から4のいずれか一に記載の、移動体が既定方向に移動中かどうかを決定するための方法であって、さらに、
前記関与ポイント位置と前記基準ポイント位置を受信して更新する工程を含む
ことを特徴とする移動体が既定方向に移動中かどうかを決定するための方法。 - 請求項1から5のいずれか一に記載の、移動体が既定方向に移動中かどうかを決定するための方法であって、さらに、
前記既定値を他の装置から受信する工程を含む
ことを特徴とする移動体が既定方向に移動中かどうかを決定するための方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP08003648.6A EP2096456B1 (en) | 2008-02-28 | 2008-02-28 | Method and apparatus for determining whether a moving entity is moving in a predetermined direction |
| EP08003648.6 | 2008-02-28 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2009205666A JP2009205666A (ja) | 2009-09-10 |
| JP2009205666A5 JP2009205666A5 (ja) | 2011-12-22 |
| JP5260235B2 true JP5260235B2 (ja) | 2013-08-14 |
Family
ID=39739582
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008287284A Expired - Fee Related JP5260235B2 (ja) | 2008-02-28 | 2008-11-10 | 移動体が既定方向に移動中かどうかを決定するための方法および装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US8330649B2 (ja) |
| EP (1) | EP2096456B1 (ja) |
| JP (1) | JP5260235B2 (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8762518B2 (en) * | 2009-07-10 | 2014-06-24 | Telcordia Technologies, Inc. | Program and method for adaptively maintaining a local peer group in a dynamic environment |
| US20110137561A1 (en) * | 2009-12-04 | 2011-06-09 | Nokia Corporation | Method and apparatus for measuring geographic coordinates of a point of interest in an image |
| JP5673108B2 (ja) * | 2010-01-06 | 2015-02-18 | 日本電気株式会社 | 通信装置、通信システムおよび通信方法 |
| US9635517B2 (en) | 2013-06-28 | 2017-04-25 | Globalfoundries Inc. | Identification of location of a target address using position information transmitted by position identifying transmitter in vicinity of target address |
| US10015720B2 (en) | 2014-03-14 | 2018-07-03 | GoTenna, Inc. | System and method for digital communication between computing devices |
| CN107132504B (zh) * | 2016-02-29 | 2020-12-22 | 富士通株式会社 | 基于粒子滤波的定位追踪装置、方法及电子设备 |
| US10944669B1 (en) | 2018-02-09 | 2021-03-09 | GoTenna, Inc. | System and method for efficient network-wide broadcast in a multi-hop wireless network using packet echos |
| CA3107919A1 (en) | 2018-07-27 | 2020-01-30 | GoTenna, Inc. | Vinetm: zero-control routing using data packet inspection for wireless mesh networks |
| EP3935882A4 (en) | 2019-03-08 | 2022-11-16 | Gotenna Inc. | METHOD OF USAGE-BASED TRAFFIC THROATTING IN A MESH WIRELESS NETWORK |
| CN111246639B (zh) * | 2020-03-12 | 2022-11-11 | 王永东 | 微波雷达路灯的照明方法、装置及存储介质 |
| CN115311871B (zh) * | 2022-08-12 | 2023-09-05 | 深圳市能信安科技股份有限公司 | 车辆行驶方向判定方法、装置、系统、设备及存储介质 |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3564543A (en) * | 1968-09-05 | 1971-02-16 | Air Land Systems Co | Aircraft landing control system |
| US3999007A (en) * | 1975-10-09 | 1976-12-21 | Carl Joseph Crane | Aircraft visual approach/landing reproducer device and system |
| US5068656A (en) * | 1990-12-21 | 1991-11-26 | Rockwell International Corporation | System and method for monitoring and reporting out-of-route mileage for long haul trucks |
| US5365516A (en) * | 1991-08-16 | 1994-11-15 | Pinpoint Communications, Inc. | Communication system and method for determining the location of a transponder unit |
| US5510795A (en) | 1994-11-10 | 1996-04-23 | Amtech Corporation | Single antenna location and direction finding system |
| US6037977A (en) * | 1994-12-23 | 2000-03-14 | Peterson; Roger | Vehicle surveillance system incorporating remote video and data input |
| JP3590827B2 (ja) * | 1996-03-27 | 2004-11-17 | アイシン・エィ・ダブリュ株式会社 | ナビゲーション装置 |
| US6072421A (en) * | 1998-05-29 | 2000-06-06 | Mitsubishi Denki Kabushiki Kaisha | Moving object high-accuracy position locating method and system |
| GB9826873D0 (en) * | 1998-12-07 | 1999-01-27 | Simoco Int Ltd | Position monitoring system |
| JP2001319294A (ja) * | 2000-05-09 | 2001-11-16 | Yazaki Corp | 無線標識システム用送信機、車載無線受信機及び無線標識システム |
| JP4376447B2 (ja) * | 2000-11-24 | 2009-12-02 | 本田技研工業株式会社 | 車両の走行安全装置 |
| JP2004037117A (ja) * | 2002-06-28 | 2004-02-05 | Matsushita Electric Works Ltd | 位置情報システム |
| JP4396292B2 (ja) * | 2003-03-11 | 2010-01-13 | パナソニック株式会社 | 車載装置及び案内システム |
| US20070040700A1 (en) * | 2004-03-24 | 2007-02-22 | Bachelder Aaron D | Cellular-based preemption system |
| JP3999230B2 (ja) * | 2005-01-04 | 2007-10-31 | ユピテル工業株式会社 | マイクロ波検出器 |
| JP2006279859A (ja) * | 2005-03-30 | 2006-10-12 | Hitachi Ltd | 移動体移動実態情報提供システム、位置情報収集装置、カーナビ装置および移動体移動実態情報提供方法 |
| US7180444B2 (en) * | 2005-06-16 | 2007-02-20 | Delphi Technologies, Inc. | System and method for determining a velocity and a direction of travel of a vehicle on a roadway |
| EP1746433B1 (de) * | 2005-07-18 | 2007-08-29 | Gerald Kampel | Verfahren und Vorrichtung zum Auffinden eines Verschütteten |
| JP2007309670A (ja) * | 2006-05-16 | 2007-11-29 | Toyota Motor Corp | 車両位置検出装置 |
| US7889691B2 (en) * | 2007-11-13 | 2011-02-15 | Telcordia Technologies, Inc. | Method of broadcasting packets in ad-hoc network |
-
2008
- 2008-02-28 EP EP08003648.6A patent/EP2096456B1/en not_active Expired - Fee Related
- 2008-11-10 JP JP2008287284A patent/JP5260235B2/ja not_active Expired - Fee Related
- 2008-11-13 US US12/292,172 patent/US8330649B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| EP2096456B1 (en) | 2013-05-29 |
| US8330649B2 (en) | 2012-12-11 |
| JP2009205666A (ja) | 2009-09-10 |
| US20090219194A1 (en) | 2009-09-03 |
| EP2096456A1 (en) | 2009-09-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5260235B2 (ja) | 移動体が既定方向に移動中かどうかを決定するための方法および装置 | |
| Oubbati et al. | Intelligent UAV-assisted routing protocol for urban VANETs | |
| Liu et al. | A survey on position-based routing for vehicular ad hoc networks | |
| Chen et al. | A connectivity-aware intersection-based routing in VANETs | |
| EP2262188B2 (en) | Method and apparatus for disseminating a data packet via multi-hop communication in a communication network | |
| Wang et al. | VDNet: an infrastructure‐less UAV‐assisted sparse VANET system with vehicle location prediction | |
| Kumar | VANET parameters and applications: A review | |
| Khan et al. | A Traffic Aware Segment-based Routing protocol for VANETs in urban scenarios | |
| DK2178064T3 (en) | Procedure for optimal forwarding of messages by Car-to-x communication | |
| JP4611929B2 (ja) | 車車間通信システムおよび車車間通信方法 | |
| Rana et al. | Inter-vehicle distance-based location aware multi-hop routing in vehicular ad-hoc network | |
| Chen et al. | BIG-CCA: Beacon-less, infrastructure-less, and GPS-less cooperative collision avoidance based on vehicular sensor networks | |
| Bernsen et al. | Greedy routing protocols for vehicular ad hoc networks | |
| Najafzadeh et al. | Broadcasting in connected and fragmented vehicular ad hoc networks | |
| US20100254294A1 (en) | Method for Distributing Data Packets in a Mobile Node Network and Associated Node | |
| Sharef et al. | A comparison of various vehicular ad hoc routing protocols based on communication environments | |
| JP2010287246A (ja) | 車車間通信システムおよび車車間通信方法 | |
| JP2010259103A (ja) | 車車間通信システムおよび車車間通信方法 | |
| Qureshi et al. | Aegrp: An enhanced geographical routing protocol for vanet | |
| Senart et al. | Vehicular networks and applications | |
| Jemaa | Multicast communications for cooperative vehicular systems | |
| KR101679275B1 (ko) | Vanet 환경에서의 라우팅 경로 설정 방법 및 장치 | |
| Rayeni et al. | A novel architecture and mechanism for on-demand services in vehicular networks with minimum overhead in target vehicle tracking | |
| Soua | Vehicular ad hoc networks: dissemination, data collection and routing: models and algorithms | |
| Kambalimath et al. | Reliable data delivery in vehicular Ad hoc networks |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111102 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20111102 |
|
| TRDD | Decision of grant or rejection written | ||
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130329 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130402 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130425 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160502 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |