JP5259553B2 - 歩行補助装置 - Google Patents
歩行補助装置 Download PDFInfo
- Publication number
- JP5259553B2 JP5259553B2 JP2009252845A JP2009252845A JP5259553B2 JP 5259553 B2 JP5259553 B2 JP 5259553B2 JP 2009252845 A JP2009252845 A JP 2009252845A JP 2009252845 A JP2009252845 A JP 2009252845A JP 5259553 B2 JP5259553 B2 JP 5259553B2
- Authority
- JP
- Japan
- Prior art keywords
- user
- joint
- link
- support member
- rigidity
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H3/00—Appliances for aiding patients or disabled persons to walk about
- A61H3/008—Appliances for aiding patients or disabled persons to walk about using suspension devices for supporting the body in an upright walking or standing position, e.g. harnesses
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H3/00—Appliances for aiding patients or disabled persons to walk about
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B23/00—Exercising apparatus specially adapted for particular parts of the body
- A63B23/035—Exercising apparatus specially adapted for particular parts of the body for limbs, i.e. upper or lower limbs, e.g. simultaneously
- A63B23/04—Exercising apparatus specially adapted for particular parts of the body for limbs, i.e. upper or lower limbs, e.g. simultaneously for lower limbs
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/0006—Exoskeletons, i.e. resembling a human figure
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/01—Constructive details
- A61H2201/0165—Damping, vibration related features
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/12—Driving means
- A61H2201/1207—Driving means with electric or magnetic drive
- A61H2201/1215—Rotary drive
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/14—Special force transmission means, i.e. between the driving means and the interface with the user
- A61H2201/1436—Special crank assembly
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1602—Physical interface with patient kind of interface, e.g. head rest, knee support or lumbar support
- A61H2201/1623—Back
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1602—Physical interface with patient kind of interface, e.g. head rest, knee support or lumbar support
- A61H2201/1628—Pelvis
- A61H2201/1633—Seat
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1602—Physical interface with patient kind of interface, e.g. head rest, knee support or lumbar support
- A61H2201/1635—Hand or arm, e.g. handle
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1602—Physical interface with patient kind of interface, e.g. head rest, knee support or lumbar support
- A61H2201/164—Feet or leg, e.g. pedal
- A61H2201/1642—Holding means therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1602—Physical interface with patient kind of interface, e.g. head rest, knee support or lumbar support
- A61H2201/165—Wearable interfaces
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1657—Movement of interface, i.e. force application means
- A61H2201/1676—Pivoting
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/50—Control means thereof
- A61H2201/5007—Control means thereof computer controlled
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/50—Control means thereof
- A61H2201/5058—Sensors or detectors
- A61H2201/5061—Force sensors
Landscapes
- Health & Medical Sciences (AREA)
- Physical Education & Sports Medicine (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Rehabilitation Therapy (AREA)
- Life Sciences & Earth Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- Pain & Pain Management (AREA)
- Epidemiology (AREA)
- Veterinary Medicine (AREA)
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Manipulator (AREA)
- Rehabilitation Tools (AREA)
Description
Claims (2)
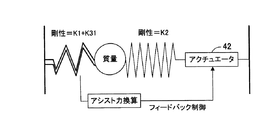
- 着座した利用者を支持可能な支持部材と、利用者の足部を収容自在な靴部と、第1関節部を介して前記支持部材に連結される第1リンクと、第2関節部を介して前記靴部に連結される第2リンクと、前記第1リンクと第2リンクとを連結する第3関節部と、前記第1リンクと第2リンクを前記第3関節部を中心として相対変位させる駆動機構とを備え、利用者の体重の少なくとも一部を支持するアシスト力を生じて利用者の歩行を補助する歩行補助装置において、利用者が前記支持部材に支持されると共に、前記駆動機構によって前記第1リンクと第2リンクを前記第3関節部を中心として相対変位させる場合、利用者の尻部から前記第1関節部までの部位の剛性をK1[N/m]、前記第1関節部から前記第3関節部を介して連結される前記第2関節部までの部位の剛性をK2[N/m]、前記第2関節部から利用者の足までの部位の剛性をK31[N/m]とするとき、(K1+K31)<K2とすることを特徴とする歩行補助装置。
- 利用者が前記支持部材に支持される場合、前記第2関節部から床面までの部位の剛性をK32[N/m]とするとき、K1<K32とすることを特徴とする請求項1記載の歩行補助装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009252845A JP5259553B2 (ja) | 2008-11-06 | 2009-11-04 | 歩行補助装置 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008285947 | 2008-11-06 | ||
| JP2008285947 | 2008-11-06 | ||
| JP2009252845A JP5259553B2 (ja) | 2008-11-06 | 2009-11-04 | 歩行補助装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010131382A JP2010131382A (ja) | 2010-06-17 |
| JP5259553B2 true JP5259553B2 (ja) | 2013-08-07 |
Family
ID=42152894
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009252845A Expired - Fee Related JP5259553B2 (ja) | 2008-11-06 | 2009-11-04 | 歩行補助装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US8591438B2 (ja) |
| JP (1) | JP5259553B2 (ja) |
| KR (1) | KR101321801B1 (ja) |
| DE (1) | DE112009002665B4 (ja) |
| WO (1) | WO2010053086A1 (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5882696B2 (ja) * | 2011-11-30 | 2016-03-09 | 大日本印刷株式会社 | 動作補助装置及び動作補助制御用プログラム |
| JP5879976B2 (ja) * | 2011-11-30 | 2016-03-08 | 大日本印刷株式会社 | 動作補助装置及び動作補助制御用プログラム |
| EP2968053B1 (en) | 2013-03-14 | 2022-07-27 | Ekso Bionics, Inc. | Non-anthropomorphic hip joint locations for exoskeletons |
| JP5755313B2 (ja) | 2013-11-11 | 2015-07-29 | 株式会社アスコ | プログラマブル表示器、および制御方法 |
| KR102186859B1 (ko) | 2014-01-09 | 2020-12-04 | 삼성전자주식회사 | 보행 보조 기구 및 보행 보조 기구의 제어 방법 |
| KR102360100B1 (ko) * | 2014-03-21 | 2022-02-08 | 완더크래프트 | 발 구조체를 포함하는 외골격 |
| JP2015208795A (ja) * | 2014-04-24 | 2015-11-24 | パナソニック株式会社 | 動作支援装置 |
| US10426637B2 (en) | 2015-05-11 | 2019-10-01 | The Hong Kong Polytechnic University | Exoskeleton ankle robot |
| EP3572060B1 (en) | 2017-01-19 | 2021-12-15 | Panasonic Intellectual Property Management Co., Ltd. | Device for preventing falls when walking, control device, control method, and program |
| JP6964279B2 (ja) | 2017-01-19 | 2021-11-10 | パナソニックIpマネジメント株式会社 | 歩行転倒防止装置、の制御装置、制御方法、並びに、プログラム |
| KR102663218B1 (ko) * | 2019-04-04 | 2024-05-03 | 현대자동차주식회사 | 착용식 의자 |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2506604A1 (fr) * | 1981-06-01 | 1982-12-03 | Salort Guy | Appareillage externe de station verticale et de marche pour handicapes moteurs des membres inferieurs |
| JP2819353B2 (ja) * | 1990-09-28 | 1998-10-30 | 本田技研工業株式会社 | 脚式移動ロボットの歩行制御装置 |
| US5432417A (en) * | 1992-04-30 | 1995-07-11 | Honda Giken Kogyo Kabushiki Kaisha | Locomotion control system for legged mobile robot |
| JPH07104856A (ja) * | 1993-10-01 | 1995-04-21 | Fanuc Ltd | 振動制御方法 |
| JPH07328965A (ja) * | 1994-06-03 | 1995-12-19 | Toyota Motor Corp | 制振制御方法および固有振動周期測定方法および制振制御装置 |
| EP1514777B1 (en) * | 1997-01-31 | 2009-03-11 | Honda Giken Kogyo Kabushiki Kaisha | Control system of legged mobile robot |
| EP1267756B1 (en) * | 2000-03-29 | 2007-11-14 | Massachusetts Institute of Technology | Speed-adaptive and patient-adaptive prosthetic knee |
| US7684896B2 (en) * | 2001-06-29 | 2010-03-23 | Honda Motor Co., Ltd. | System and method of estimating joint loads using an approach of closed form dynamics |
| US7650204B2 (en) * | 2001-06-29 | 2010-01-19 | Honda Motor Co., Ltd. | Active control of an ankle-foot orthosis |
| US7623944B2 (en) * | 2001-06-29 | 2009-11-24 | Honda Motor Co., Ltd. | System and method of estimating joint loads in a three-dimensional system |
| JP2006087533A (ja) * | 2004-09-22 | 2006-04-06 | Honda Motor Co Ltd | 歩行補助装置の腰部支持具 |
| JP4344314B2 (ja) * | 2004-12-28 | 2009-10-14 | 本田技研工業株式会社 | 体重免荷アシスト装置および体重免荷アシストプログラム |
| US20070123997A1 (en) * | 2005-03-31 | 2007-05-31 | Massachusetts Institute Of Technology | Exoskeletons for running and walking |
| US7313463B2 (en) * | 2005-03-31 | 2007-12-25 | Massachusetts Institute Of Technology | Biomimetic motion and balance controllers for use in prosthetics, orthotics and robotics |
| JP4588666B2 (ja) * | 2005-05-27 | 2010-12-01 | 本田技研工業株式会社 | 歩行補助装置の制御装置および制御プログラム |
| JP4641225B2 (ja) * | 2005-07-19 | 2011-03-02 | 本田技研工業株式会社 | 歩行補助装置 |
| KR100856844B1 (ko) * | 2005-05-27 | 2008-09-05 | 혼다 기켄 고교 가부시키가이샤 | 보행 보조 장치 |
| JP4617496B2 (ja) * | 2005-07-22 | 2011-01-26 | トヨタ自動車株式会社 | 補助装置 |
| US7578799B2 (en) * | 2006-06-30 | 2009-08-25 | Ossur Hf | Intelligent orthosis |
| JP4666644B2 (ja) * | 2006-07-12 | 2011-04-06 | 本田技研工業株式会社 | 歩行補助装具の制御装置 |
-
2009
- 2009-11-04 US US13/127,877 patent/US8591438B2/en not_active Expired - Fee Related
- 2009-11-04 JP JP2009252845A patent/JP5259553B2/ja not_active Expired - Fee Related
- 2009-11-04 KR KR1020117009179A patent/KR101321801B1/ko not_active Expired - Fee Related
- 2009-11-04 WO PCT/JP2009/068814 patent/WO2010053086A1/ja not_active Ceased
- 2009-11-04 DE DE112009002665.6T patent/DE112009002665B4/de not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US8591438B2 (en) | 2013-11-26 |
| US20110224586A1 (en) | 2011-09-15 |
| KR101321801B1 (ko) | 2013-10-28 |
| DE112009002665T5 (de) | 2013-04-04 |
| JP2010131382A (ja) | 2010-06-17 |
| KR20110074876A (ko) | 2011-07-04 |
| WO2010053086A1 (ja) | 2010-05-14 |
| DE112009002665B4 (de) | 2017-11-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5259553B2 (ja) | 歩行補助装置 | |
| US7731673B2 (en) | Walking assisting device | |
| CN101119696B (zh) | 步行辅助装置 | |
| US8114034B2 (en) | Walking assisting device | |
| JP4666644B2 (ja) | 歩行補助装具の制御装置 | |
| US8118763B2 (en) | Walking assist device | |
| US20090014042A1 (en) | Walk assistance device | |
| US7731674B2 (en) | Walking assistance device | |
| JP4641225B2 (ja) | 歩行補助装置 | |
| JP2008012224A (ja) | 歩行補助装置 | |
| EP1905407B1 (en) | Walking assistance device | |
| JP5841787B2 (ja) | 装着型動作支援装置 | |
| JP2014068866A (ja) | 歩行支援装置、及び歩行支援プログラム | |
| JP5137704B2 (ja) | 歩行補助装置の制御装置 | |
| US8083702B2 (en) | Walking assistance device | |
| JPWO2018179431A1 (ja) | 介助装置 | |
| JP4387996B2 (ja) | 歩行補助装置 | |
| JP5285576B2 (ja) | 歩行補助装置 | |
| JP4724059B2 (ja) | 歩行補助装置 | |
| JP5484925B2 (ja) | 案内機構および歩行補助装置 | |
| US20110021330A1 (en) | Exercise aiding apparatus | |
| JP5356840B2 (ja) | 歩行補助装置 | |
| JP2014184087A (ja) | 支援装置、及び支援プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20111124 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120518 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130123 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130318 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130410 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130424 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160502 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5259553 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |