JP5209765B2 - 流体輸送駆動ユニット、および流体輸送駆動ユニットの制御プログラム - Google Patents
流体輸送駆動ユニット、および流体輸送駆動ユニットの制御プログラム Download PDFInfo
- Publication number
- JP5209765B2 JP5209765B2 JP2011165699A JP2011165699A JP5209765B2 JP 5209765 B2 JP5209765 B2 JP 5209765B2 JP 2011165699 A JP2011165699 A JP 2011165699A JP 2011165699 A JP2011165699 A JP 2011165699A JP 5209765 B2 JP5209765 B2 JP 5209765B2
- Authority
- JP
- Japan
- Prior art keywords
- fluid transport
- fluid
- drive unit
- unit
- cam
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images











Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/14—Infusion devices, e.g. infusing by gravity; Blood infusion; Accessories therefor
- A61M5/168—Means for controlling media flow to the body or for metering media to the body, e.g. drip meters, counters ; Monitoring media flow to the body
- A61M5/172—Means for controlling media flow to the body or for metering media to the body, e.g. drip meters, counters ; Monitoring media flow to the body electrical or electronic
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/14—Infusion devices, e.g. infusing by gravity; Blood infusion; Accessories therefor
- A61M5/142—Pressure infusion, e.g. using pumps
- A61M5/14244—Pressure infusion, e.g. using pumps adapted to be carried by the patient, e.g. portable on the body
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B43/00—Machines, pumps, or pumping installations having flexible working members
- F04B43/08—Machines, pumps, or pumping installations having flexible working members having tubular flexible members
- F04B43/082—Machines, pumps, or pumping installations having flexible working members having tubular flexible members the tubular flexible member being pressed against a wall by a number of elements, each having an alternating movement in a direction perpendicular to the axes of the tubular member and each having its own driving mechanism
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B43/00—Machines, pumps, or pumping installations having flexible working members
- F04B43/12—Machines, pumps, or pumping installations having flexible working members having peristaltic action
- F04B43/1253—Machines, pumps, or pumping installations having flexible working members having peristaltic action by using two or more rollers as squeezing elements, the rollers moving on an arc of a circle during squeezing
- F04B43/1261—Machines, pumps, or pumping installations having flexible working members having peristaltic action by using two or more rollers as squeezing elements, the rollers moving on an arc of a circle during squeezing the rollers being placed at the outside of the tubular flexible member
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B49/00—Control, e.g. of pump delivery, or pump pressure of, or safety measures for, machines, pumps, or pumping installations, not otherwise provided for, or of interest apart from, groups F04B1/00 - F04B47/00
- F04B49/06—Control using electricity
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/14—Infusion devices, e.g. infusing by gravity; Blood infusion; Accessories therefor
- A61M5/142—Pressure infusion, e.g. using pumps
- A61M5/14244—Pressure infusion, e.g. using pumps adapted to be carried by the patient, e.g. portable on the body
- A61M2005/14268—Pressure infusion, e.g. using pumps adapted to be carried by the patient, e.g. portable on the body with a reusable and a disposable component
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/12—General characteristics of the apparatus with interchangeable cassettes forming partially or totally the fluid circuit
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/35—Communication
- A61M2205/3546—Range
- A61M2205/3569—Range sublocal, e.g. between console and disposable
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/14—Infusion devices, e.g. infusing by gravity; Blood infusion; Accessories therefor
- A61M5/142—Pressure infusion, e.g. using pumps
- A61M5/14212—Pumping with an aspiration and an expulsion action
- A61M5/14228—Pumping with an aspiration and an expulsion action with linear peristaltic action, i.e. comprising at least three pressurising members or a helical member
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/14—Infusion devices, e.g. infusing by gravity; Blood infusion; Accessories therefor
- A61M5/142—Pressure infusion, e.g. using pumps
- A61M5/14212—Pumping with an aspiration and an expulsion action
- A61M5/14232—Roller pumps
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/14—Infusion devices, e.g. infusing by gravity; Blood infusion; Accessories therefor
- A61M5/168—Means for controlling media flow to the body or for metering media to the body, e.g. drip meters, counters ; Monitoring media flow to the body
- A61M5/16804—Flow controllers
- A61M5/16827—Flow controllers controlling delivery of multiple fluids, e.g. sequencing, mixing or via separate flow-paths
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/14—Infusion devices, e.g. infusing by gravity; Blood infusion; Accessories therefor
- A61M5/168—Means for controlling media flow to the body or for metering media to the body, e.g. drip meters, counters ; Monitoring media flow to the body
- A61M5/172—Means for controlling media flow to the body or for metering media to the body, e.g. drip meters, counters ; Monitoring media flow to the body electrical or electronic
- A61M5/1723—Means for controlling media flow to the body or for metering media to the body, e.g. drip meters, counters ; Monitoring media flow to the body electrical or electronic using feedback of body parameters, e.g. blood-sugar, pressure
Landscapes
- Engineering & Computer Science (AREA)
- Health & Medical Sciences (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Hematology (AREA)
- Anesthesiology (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Vascular Medicine (AREA)
- Life Sciences & Earth Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Infusion, Injection, And Reservoir Apparatuses (AREA)
- External Artificial Organs (AREA)
Description
特許文献1 特開2011−111989号公報
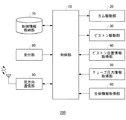
20 カム駆動部
30 ピストン駆動部
40 ピストン位置情報取得部
50 チューブ圧力情報取得部
60 生体情報取得部
70 制御情報格納部
80 受付部
90 双方向通信部
100 流体輸送カートリッジ
101 第1流体注入口部
102 第2流体注入口部
103 流体吐出口部
110 外装部材
111 第1弾性チューブ
112 第2弾性チューブ
113 第3弾性チューブ
130 切替弁
140 押圧ピン
150 カム収容開口
160 挿通孔
200 流体輸送駆動ユニット
205 第1フック
206 第2フック
210 カムユニット
250 ピン
300 流体輸送装置
Claims (10)
- 装着された流体輸送カートリッジの輸送路を満たす流体を、前記輸送路の吐出口へ送出する駆動機構を動作させる駆動部と、
前記流体輸送カートリッジごとに予め測定された特性値を受け付ける受付部と、
前記受付部が受け付けた前記特性値に基づいて前記駆動部を制御する制御部と
を備える流体輸送駆動ユニット。 - 前記特性値は、前記駆動部の駆動量に対する前記流体の吐出量のばらつきを補正する補正値である請求項1に記載の流体輸送駆動ユニット。
- 前記特性値は、前記輸送路を構成する弾性チューブの個体差に基づくばらつきを補正する補正値である請求項1または2に記載の流体輸送駆動ユニット。
- 前記駆動部は、前記弾性チューブを外部から押圧する押圧ピンを変位させるカム体であり、
前記制御部は、前記補正値に基づいて前記カム体の回転量を制御する請求項3に記載の流体輸送駆動ユニット。 - 前記カム体を収容するとともに、前記カム体の回転中心に対して円弧形状を有し、前記流体輸送カートリッジに対する位置決めをする位置決め部を備える請求項4に記載の流体輸送駆動ユニット。
- 前記弾性チューブの圧力を計測する圧力センサを備える請求項3から5のいずれか1項に記載の流体輸送駆動ユニット。
- 前記制御部は、前記圧力センサの出力に基づいて前記駆動部を制御する請求項6に記載の流体輸送駆動ユニット。
- 前記流体輸送駆動ユニットが装着される被検体の生体情報を取得する生体情報取得部を備え、
前記制御部は、前記生体情報に基づいて前記駆動部を制御する請求項1から請求項7のいずれか1つに記載の流体輸送駆動ユニット。 - 無線を介して前記駆動部を制御するための設定条件を取得する通信部を備え、
前記制御部は、前記設定条件に基づいて前記駆動部を制御する請求項1から請求項8のいずれか1つに記載の流体輸送駆動ユニット。 - 装着された流体輸送カートリッジに予め測定された特性値を受け付ける受付ステップと、
前記流体輸送カートリッジの輸送路を満たす流体を吐出口へ送出する駆動機構を動作させる駆動部を、前記受付ステップで受け付けた前記特性値に基づいて制御する制御ステップと
をコンピュータに実行させる流体輸送駆動ユニットの制御プログラム。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011165699A JP5209765B2 (ja) | 2011-07-28 | 2011-07-28 | 流体輸送駆動ユニット、および流体輸送駆動ユニットの制御プログラム |
| PCT/JP2012/004760 WO2013014934A1 (ja) | 2011-07-28 | 2012-07-26 | 流体輸送駆動ユニット、および流体輸送駆動ユニットの制御プログラム |
| CN201280006206.4A CN103370541B (zh) | 2011-07-28 | 2012-07-26 | 流体输送驱动单元及流体输送驱动单元的控制程序 |
| EP12817535.3A EP2664798B1 (en) | 2011-07-28 | 2012-07-26 | Fluid-conveying drive unit, and control program for fluid-conveying drive unit |
| US13/937,147 US9320852B2 (en) | 2011-07-28 | 2013-07-08 | Fluid transport driving unit and computer readable medium |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011165699A JP5209765B2 (ja) | 2011-07-28 | 2011-07-28 | 流体輸送駆動ユニット、および流体輸送駆動ユニットの制御プログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013029078A JP2013029078A (ja) | 2013-02-07 |
| JP5209765B2 true JP5209765B2 (ja) | 2013-06-12 |
Family
ID=47600796
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011165699A Expired - Fee Related JP5209765B2 (ja) | 2011-07-28 | 2011-07-28 | 流体輸送駆動ユニット、および流体輸送駆動ユニットの制御プログラム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9320852B2 (ja) |
| EP (1) | EP2664798B1 (ja) |
| JP (1) | JP5209765B2 (ja) |
| CN (1) | CN103370541B (ja) |
| WO (1) | WO2013014934A1 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5683620B2 (ja) * | 2013-02-26 | 2015-03-11 | プライムテック株式会社 | 流体輸送装置 |
| JP2015167709A (ja) * | 2014-03-07 | 2015-09-28 | セイコーエプソン株式会社 | 液体輸送装置及びポンプユニット |
| JP5938137B1 (ja) * | 2015-12-15 | 2016-06-22 | プライムテック株式会社 | 流体切替弁および流体輸送カートリッジ |
| EP4142826A1 (en) * | 2020-05-01 | 2023-03-08 | Bayer HealthCare LLC | Pinch valve for fluid injector system |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3736930A (en) * | 1970-04-14 | 1973-06-05 | Ivac Corp | Parenteral administration fluid flow control system |
| DE3018641C2 (de) * | 1980-05-16 | 1986-05-28 | Hans 8228 Freilassing Rodler | Automatische Infusionspumpe |
| US4741736A (en) * | 1986-12-10 | 1988-05-03 | I-Flow Corporation | Programmable infusion pump |
| JPH01249064A (ja) * | 1988-03-30 | 1989-10-04 | Nikkiso Co Ltd | 輸液管の閉塞状態検出装置 |
| US5205819A (en) * | 1989-05-11 | 1993-04-27 | Bespak Plc | Pump apparatus for biomedical use |
| JP3256013B2 (ja) * | 1993-01-12 | 2002-02-12 | シャープ株式会社 | 輸液装置およびその制御方法 |
| JPH06317257A (ja) * | 1993-04-30 | 1994-11-15 | Sharp Corp | 輸液ポンプ装置 |
| US5695473A (en) * | 1994-07-27 | 1997-12-09 | Sims Deltec, Inc. | Occlusion detection system for an infusion pump |
| ATE251867T1 (de) * | 1995-04-20 | 2003-11-15 | Acist Medical Sys Inc | Angiographischer injektor |
| WO1997020594A1 (en) * | 1995-12-04 | 1997-06-12 | Alphamed Incorporated | Infusion pump with disposable tubing and size indicating means |
| US7267665B2 (en) * | 1999-06-03 | 2007-09-11 | Medtronic Minimed, Inc. | Closed loop system for controlling insulin infusion |
| JP2000054967A (ja) * | 1998-08-11 | 2000-02-22 | Takanori Koide | ポンプ及びチューブカートリッジ |
| DE60223549T2 (de) * | 2001-07-31 | 2008-09-25 | Scott Laboratories, Inc., Lubbock | Vorrichtung zur durchführung einer iv infusion |
| CN2702746Y (zh) * | 2004-03-01 | 2005-06-01 | 苏州市力得医疗器械设备厂 | 带加热器的医用输液泵泵片蠕动装置 |
| US20050209563A1 (en) * | 2004-03-19 | 2005-09-22 | Peter Hopping | Cassette-based dialysis medical fluid therapy systems, apparatuses and methods |
| JP3992058B2 (ja) * | 2005-11-16 | 2007-10-17 | セイコーエプソン株式会社 | 流体輸送装置 |
| JP4919461B2 (ja) * | 2005-11-28 | 2012-04-18 | 日本コヴィディエン株式会社 | 医療用活栓 |
| JP5298699B2 (ja) * | 2008-08-20 | 2013-09-25 | セイコーエプソン株式会社 | 制御ユニット、チューブユニット、マイクロポンプ |
| JP5145177B2 (ja) * | 2008-09-12 | 2013-02-13 | 株式会社K&Y | 輸液ポンプシステム |
| JP5532862B2 (ja) | 2009-11-27 | 2014-06-25 | セイコーエプソン株式会社 | 流体輸送装置 |
| US8142400B2 (en) * | 2009-12-22 | 2012-03-27 | Q-Core Medical Ltd. | Peristaltic pump with bi-directional pressure sensor |
-
2011
- 2011-07-28 JP JP2011165699A patent/JP5209765B2/ja not_active Expired - Fee Related
-
2012
- 2012-07-26 EP EP12817535.3A patent/EP2664798B1/en not_active Not-in-force
- 2012-07-26 WO PCT/JP2012/004760 patent/WO2013014934A1/ja active Application Filing
- 2012-07-26 CN CN201280006206.4A patent/CN103370541B/zh not_active Expired - Fee Related
-
2013
- 2013-07-08 US US13/937,147 patent/US9320852B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| EP2664798A4 (en) | 2015-06-03 |
| JP2013029078A (ja) | 2013-02-07 |
| CN103370541A (zh) | 2013-10-23 |
| CN103370541B (zh) | 2014-12-03 |
| EP2664798A1 (en) | 2013-11-20 |
| EP2664798B1 (en) | 2016-07-20 |
| US9320852B2 (en) | 2016-04-26 |
| US20130296774A1 (en) | 2013-11-07 |
| WO2013014934A1 (ja) | 2013-01-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5205497B2 (ja) | 流体輸送カートリッジ | |
| KR101217147B1 (ko) | 펜형 휴대용 인슐린 주입 장치 | |
| JP5209765B2 (ja) | 流体輸送駆動ユニット、および流体輸送駆動ユニットの制御プログラム | |
| KR101524678B1 (ko) | 길이단축형 주사기 구동장치 | |
| US8512296B2 (en) | Injection device | |
| JP5711156B2 (ja) | 薬物送達システム | |
| US9168337B2 (en) | Fluid injecting apparatus | |
| JP6240163B2 (ja) | 流体を供給するカートリッジ | |
| JP2017532157A (ja) | 自己配向式シリンジおよびシリンジインターフェース | |
| EP3593838A1 (en) | High precision syringe with removable pump unit | |
| US20240335616A1 (en) | Medication delivery device with gear set dosage system | |
| KR20140035746A (ko) | 펜형 휴대용 인슐린 주입장치 | |
| US20190046727A1 (en) | Method for improving the accuracy of the quantity of medication injected using an injector pen and injector pen | |
| WO2022038616A1 (en) | Devices and systems for automated collection of blood into tube stored at atmospheric pressure | |
| KR20110129269A (ko) | 생체시료성분 측정을 위한 카트리지 및 생체시료성분 측정 장치 | |
| EP2298393A1 (en) | Syringe and method for dispensing a liquid in a controllable manner | |
| US20230108800A1 (en) | Infusion pump with multiple reservoirs | |
| CN113260398B (zh) | 给药液装置 | |
| CA3229346A1 (en) | Drug delivery device cassette | |
| CN106466499B (zh) | 注射器泵 | |
| WO2025004031A1 (en) | Devices and systems for automated collection of blood into tube stored at atmospheric pressure and mixing of the blood with additives in the tube | |
| TWI566797B (zh) | Liquid transmission device and liquid transmission monitoring device | |
| JP2010119581A (ja) | ポンプ装置、生体成分測定装置及び人工膵臓装置 | |
| JP2014212805A (ja) | 薬液送液装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20121130 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20121130 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20121218 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121225 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130116 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130212 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130221 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160301 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5209765 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |