JP5190510B2 - 神経外科用多機能ロボット化プラットフォームと位置調整方法 - Google Patents
神経外科用多機能ロボット化プラットフォームと位置調整方法 Download PDFInfo
- Publication number
- JP5190510B2 JP5190510B2 JP2010512739A JP2010512739A JP5190510B2 JP 5190510 B2 JP5190510 B2 JP 5190510B2 JP 2010512739 A JP2010512739 A JP 2010512739A JP 2010512739 A JP2010512739 A JP 2010512739A JP 5190510 B2 JP5190510 B2 JP 5190510B2
- Authority
- JP
- Japan
- Prior art keywords
- image acquisition
- arm
- robot arm
- acquisition means
- platform
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images








Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
- A61B2090/064—Measuring instruments not otherwise provided for for measuring force, pressure or mechanical tension
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B2090/364—Correlation of different images or relation of image positions in respect to the body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B2090/364—Correlation of different images or relation of image positions in respect to the body
- A61B2090/365—Correlation of different images or relation of image positions in respect to the body augmented reality, i.e. correlating a live optical image with another image
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/10—Computer-aided planning, simulation or modelling of surgical operations
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/10—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges for stereotaxic surgery, e.g. frame-based stereotaxis
- A61B90/11—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges for stereotaxic surgery, e.g. frame-based stereotaxis with guides for needles or instruments, e.g. arcuate slides or ball joints
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Medical Informatics (AREA)
- General Health & Medical Sciences (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- Robotics (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Manipulator (AREA)
- Numerical Control (AREA)
- Endoscopes (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Forklifts And Lifting Vehicles (AREA)
Description
より特徴的には、本発明は、神経外科用の多機能ロボット化プラットフォームおよび関連する実施方法に関するものである。
そのようなフレームには、観血手術に対応していない、あるいは、ほとんど対応していないという不都合がある。
該フレームがかさばることの他に、もう一つの重要な不都合は、脳頭蓋の骨にしっかり固定することが必要となるということにある。
そのようなシステムによって、コンピュータ断層撮影、磁気共鳴画像法(MRI)またはその他によって与えられた術前画像と、たとえば赤外線帯域で放出する、機器に取り付けられた複数の光源を備えた三次元の定位システムとに基づいて解剖学的構造の位置を特定することが可能となる。
取得されたデジタル画像は、計算機の記憶ブロックに転送される。
外科用機器あるいは特定の機器を用いて、外科医は、この機器の先端を、X線不透過性マーカーのそれぞれと接触させる。
このようにして、機器の位置を、先に取得されているデジタル医療画像に対して特定することが可能である。
同様に、とりわけ外科的行為を行っている間に、機器の画像およびその位置は、デジタル画像と重ねることで、視覚化モニター上に同時に表示することができる。
これは主として、X線不透過性パレットが動く器官である皮膚に貼り付けられ、頭蓋骨に固定的に導入されないことに起因している。
このような用具は、とりわけ仏国特許出願公開第2871363号明細書に記載されている。
このロボット装置は、ロボットアーム、ロボットアームを用いた解剖学的目印の収集手段、これら解剖学的目印の処理手段および外科用器具をガイドする機器の自動位置決定手段を備えており、このガイド機器は、ロボットアームに担持されている。
・とりわけデジタル画像を受信し、処理することができる処理手段を統合したプランニング・コンソールと、
・アームの複数の区画を有し、該区画の一方が近端部で他方が遠端部であり、前記各区画が関節によって互いに連結され、アームの遠端部区画が器具、機器およびその他を受けるように構成された受容機構を具備し、プランニング・コンソールによって操作される位置決定ロボットアームと、
・治療すべき解剖区域の画像を取得することに適し、プランニング・コンソールが具備する処理手段に電気的に接続することができ、アームの遠端部区画が具備する受容機構に位置付けられ、取り外し可能に固定されることに適している少なくとも一つのビデオ画像取得手段と、
・アームの遠端部区画の受容機構に位置付けられ、取り外し可能に固定されるように適合化された器具、機器およびその他と、
・術前および術中の画像の視覚化手段であり、視覚化すべき画像に固有のビデオ信号を受信するためにプラニング・コンソールに電気的に接続され、かつ/または画像取得手段に電気的に接続されている視覚化手段、
を具備することを特徴としている。
このとき、ロボットアームは、協働モードで作動する。
このようなセンサーによって、使用者は、たとえば目立った解剖学的地点またはX線不透過性マーカーの位置、あるいは患者の皮膚と接触している複数の点の位置を取得し、再構成によって面を得られるようになっている。
機械的なポインティング機器を使うときと同様に、このようなセンサーによって、使用者は、目立っている解剖学的地点の位置、X線不透過性マーカーの位置または患者の皮膚と接触している複数の点の位置を取得し、再構成によって面を得られるようになっている。
レーザーポインターによって、術前の画像法で同定された患者における解剖学的構造に狙いを定めることが可能となる。
協働モード(上記で定義したとおり)では、使用者は、レーザーポインターを装備した位置決定ロボットアームの端部を掴み、該アームを手動で動かすことによって、患者の頭部にある標的を指示することができる。
指示された方向は、プランニング・コンソールの術前画像に表示される。
こうして、外科行為は、外科医によってではなく、プランニングにしたがって、ロボットアームによって行われることになる。
この画像取得手段は、たとえば、少なくとも一つのビデオカメラ、たとえばデジタル・タイプのビデオカメラを具備している。
協働モードでは、上記で定義したように、使用者は、位置決定アームの端部を掴み、該アームを手動で動かすことで患者の頭部における選択した区域を視覚化することができる。
視覚化された区域は、プランニング・コンソールの術前画像に表示される。
画像取得手段によって放出されるビデオ・ストリームは、プランニング・コンソールのモニターに同時に送信される。
したがって、外科医および該外科医のチームの他のメンバーは、手術中に解剖区域の同一ビデオ画像を視覚化する。
ビデオ・ストリームは、その他の視覚化手段だけではなく、同時に、このその他の視覚化手段およびプランニング・コンソールのモニターに送信することができる。
この同じ制御ボックスによって、画像取得手段の一つまたは複数のカメラ、とりわけズームレベルや焦点距離の調整が可能となる。
この制御ボックスは、制御ボタンおよび/または少なくとも一つの制御レバーを具備することができる。
このとき、本発明の目的であるプラットフォームは、単純な外科用顕微鏡と同等のものである。
したがって、装置は、治療すべき解剖区域のビデオ・ストリームを受信するのと同時に該区域を照射する。
デジタル・タイプのビデオカメラは、強い照射を必要としないため、該カメラを用いることは確かな利点である。
解剖区域の正しい視認のためには、室内照明だけで十分となり得る。
これらレーザービームは、一点に収束し、該点は、立体カメラの二つの光学軸の交差点となるように調整することができる。
また、該収束レーザー・モジュールは、製造面で、二つの立体カメラの中心を同一点に設定することを容易にし、画像取得手段である器具のジオメトリを決定するという利点も有している。
この可視レーザービームは、解剖区域のビデオ画像が得られる軸を実現する。
したがって、使用者は、外科行為の必要性に応じて、解剖区域のビデオ画像を方向付けるために、ハンドルによって画像取得手段を回転させることができる。
ポインターの先端の位置は、二つの立体画像における一つまたは複数のマーカーを同定し、三角測量によって計算することができる。
この解決法の利点は、立体カメラのペアが治療すべき解剖区域に近い領域に位置付けられることと、それにより光学的な位置決定による現状のニューロナビゲーション・システムに共通する「視線」という問題が克服されることにある。
このとき、本システムは、ニューロナビゲーション・システムと結合した顕微鏡の好適な代替とすることができる。
解剖区域とプランニング・コンソールの術前画像に表示された対象となる地点は、たとえば収束レーザービームの交差点および/または中央レーザービームの衝撃点および/または可視マーカーを備えた機械的ポインターの接触点とすることができる。
これらモニターが、好適にはヘッドセットまたは眼鏡に取り付けられることで、外科医は、外科行為を行うために手を空けておくことができる。
たとえば、術前画像、あるいは、標的地点、執刀地点、直線経路、対象となる面、対象となる容積といったプランニング上の仮想的な対象に基づいて作成された患者のデジタルモデルである。
このとき、外科医は、外科行為を行うために最適と考えられる位置で手術を行うことができる。
カメラの投射モデルを事前に知っていることで、仮想の画像を実際の画像に重ねて標的となっている解剖区域の画定された要素を視覚化することができる。
この要素は、たとえば腫瘍切除の場合には腫瘍であり、もしくは、標的点、執刀地点、軌道、機器あるいは対象となる解剖区域であることもある。
このとき、立体視覚化システムは、プランニングの仮想要素によって補強された、解剖区域のビデオ画像を表示する。
このように、拡張現実機能が保証される。
拡張現実によって、外科医は自分が手術している区域と、モニターに表示されている術前画像とを交互に見なくてもよくなり、これらの情報の対応を頭の中でとらずに済むため、これは非常に有用な機能である。
すべての情報は、同一のモニター上に重ねて投射される。
立体視覚化システムは、とりわけ、ありのままの情報、たとえば距離や容積などを表示することができる。
・神経外科的手術の前に、治療すべき区域の第一のデジタル画像を取得し、記憶し処理するためにこれらのデジタル画像をネットワークまたは物理媒体を介してプランニング・コンソールに送信することと、
・手術中に、ロボットアームの遠端部区画の受容機構によって担持されている走査機器を用いて、第一のデジタル画像上に既に表示されている患者の体の領域の適切な部分の第二のデジタル画像を取得し、これら第二のデジタル画像を、記憶し処理するためにプランニング・コンソールに送信することと、
・第一のデジタル画像に基づき、患者の適切な体の領域を表す第一の三次元デジタルモデルを構築することと、
・第二のデジタル画像に基づき、同じく患者の適切な体の領域を表す第二の三次元デジタルモデルを構築することと、
・一方および他方のモデルに表されている適切な体の領域の各表示を重ねることで、第一および第二のモデルの対応をとること、
から構成される。
これらの視覚化手段は、視覚化すべき画像に関するビデオ信号を受信するためにプラニング・コンソールに電気的に接続され、かつ/またはカメラのようなビデオ画像取得手段14に電気的に接続されている。
このケースは、とりわけアーム3の制御に固有の電子工学系を収容している。
各モーターは、隣接する二つの区画を互いに対して旋回駆動させることに適しており、関連する各インクリメンタル・エンコーダーは、これらの区画の一方に対する他方の角度位置に関する情報を与えることに適している。
関節によって、末端の器具、機器およびその他の位置(3自由度)ならびに方向(3自由度)を決定することが可能となる。
インクリメンタル・エンコーダーによって測定された角度の値は、ロボットアームの認識されているジオメトリと、アーム3によって担持されている器具、機器およびその他の認識されているジオメトリによって、ロボットアームの遠端部のデカルト座標、器具、機器およびその他の端部のデカルト座標および空間内でのこの器具の方向を計算することを可能にする。
これらのキャスター8およびフレームによって、床での容易な移動が保証される。
したがって、ケースは床に対して固定される。
該分散器または各分散器は、たとえば電気制御式である。
モーター71もまた、電動ジャッキで構成することができる。
各固定フランジ9は、台のレールの形状およびサイズと相容れる形状およびサイズを有している。
各支持構造体10は、対応する固定フランジ9を受容する垂直アーム10aで構成される。
この固定フランジ9は、垂直アーム10aに沿って高さを変えられるように取り付けられており、適切な位置に応じてアーム10aに固定するための圧力ねじまたはその他のような締め付け機構を具備している。
各支持構造体は、垂直アーム10aに固定された水平アーム10bも有している。
この水平アーム10bは、ケース7が有するレール支持体11内で位置調節できるように取り付けられている小溝と係合する第二の垂直アーム10cを具備している。
この第二の垂直アームは、ねじによって小溝で固定されることになり、該ねじによって、レール支持体11内での小溝の固定も確実になされる。
このケース7は、作動中にはケース7とヘッドレスト15の間の堅固な結合を保証する固有の固定手段を介してヘッドレスト15に接続される。
この配置には、手術台Tの柔軟性から解放されるという利点がある。
これら固定手段は、ヘッドレスト15に対するケース7の適切な位置決定を可能にする、非作動と呼ばれる状態に置くことができる。
得るべき標的と接触するように誘導されるようになっているこの機械的ポインターは、ポインティング・ボールまたはドライポイントを具備することができる。
この図面では、このセンサー17が、ロボットアームの遠端部区画によって担持され、患者の頭部Hの特徴的な地点に向けて方向付けられているのが分かる。
図7に示しているように、好ましい一実施態様では、術野の画像取得手段は、支持台140にたとえばデジタル・タイプの二つの立体カメラ141を具備していることで、治療すべき解剖区域の二つの立体ビデオ画像を取得し、以下に説明する立体画像の視覚化システムによって前記区域の3D映像を再現できるようになっている。
これらの二つの立体カメラ141が、中央の光学軸AA’に対して対称的に配置されていることが注目される。
これらの収束レーザー・モジュール143は、可視レーザービームを照射し、それらビームが、立体カメラの二つの光学軸の交差点となるように調整することのできる一点に収束するように方向付けられている。
確認できるように、収束点は光学軸AA’に属している。
また、該収束レーザー・モジュールは、同一点に二つの立体カメラの中心を設定することを容易にし、画像取得手段器具のジオメトリを決定するという点で、製造上の利点も有している。
この可視レーザービームは、解剖区域のビデオ画像が得られる軸を実現する。
このシャフト145は、支持台140に堅固に固定することができる。
鞘146には、たとえばあご付きの締め付け機構を付け加えることができ、該締め付け機構は、図示されていないが、鞘146に対する画像取得手段14のあらゆる旋回運動を防止するために、作動しているときにシャフト145を締め付けるようになっている。
このあご機構は、旋回用操作ハンドル147に設置された制御体に対する作用によって、非作動の状態にすることができる。
非作動状態では、この締め付け機構は、鞘146に対する画像取得手段14の旋回を許可することになる。
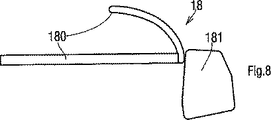
この立体視覚化手段は、外科医に担持されるようになっており、外科医の頭部にはめられるようになっているヘッドセット180と、外科医の目の正面に位置調整可能な仕方で用いられる二つの視覚化モニター181とを備えている。
視覚化モニターには、治療すべき解剖区域のビデオ画像を表示することができ、該画像は、場合によっては、拡張現実機能を確実にするために、プランニングによる仮想要素によって質が高められている。
この図面では、可視マーカー20が、特にこの場合、白い区域と黒い区域で強く対比された区域を含んでいることが確認できる。
可視マーカー20のおかげで、機械的ポインター19の先端の空間位置を、画像取得手段14の二つのビデオカメラによって提供された二つの立体画像におけるマーカーを特定することによる三角測量によって計算することができる。
その使用法は四つの過程に基づいており、該過程とは、
・治療すべき区域のデジタル画像(スキャナーまたはMRI)を取得し、ネットワークまたは物理媒体を介してプランニング・コンソール1に、これらのデジタル画像を送信する第一の過程と、
・これらの画像を処理し、解剖学的構造を同定し、たとえば生検針の軌道を確立するために、執刀点および標的点を画定するといった、外科行為のプランニングを行う第二の過程と、
・以下に説明するモードの一つにしたがって、術前画像と術中の患者の頭部の位置との対応をとる第三の過程と、
・そして、たとえば、ガイド、レーザーポインター、カメラ、取得装置およびその他のような末端の器具4の位置を自動で決定する最後の過程である。
この場合、前記マーカーは、術前画像を取得する前に患者の頭部に設置される。
該マーカーは、画像の目印の中で位置を判定するために、プランニングの過程において画像上で同定される(手動での修正の可能性を残して自動的に)。
画像の目印およびロボットの目印において、各マーカーの位置がいったん認識されると、点対点の位置調整アルゴリズムによって、それら二つの目印の対応をとることが可能となる。
外科医は、白黒の可視マーカー20を備えた機械的ポインター19を用いて、X線不透過性マーカーの位置特定を手動で行うことができる。
また、本システムは、患者の頭部Hの周囲のさまざまな位置に画像取得手段14を配置し、X線不透過性マーカーを含む立体画像を取得し、各X線不透過性マーカーの位置を特定するために画像を分割し、そしてロボットアームの座標系においてそれらの三次元位置を三角測量によって計算することで、X線不透過性マーカーの位置特定を自動で行うことができる。
X線不透過性マーカーの位置特定を容易にするために、視界の中で強い対比を有する特定のマーカーを用いることもできる。
手術の際、外科医は、センサーを備えた位置決定ロボットアームを手動で動かすことで、鼻、弓状部、耳、歯またはその他のような特徴的な解剖学的点または面の位置を特定する。
点−面あるいは面−面の位置調整アルゴリズムによって、このように術前検査で得られた点または面の位置調整が可能となる。
このような取得方法は、位置決定ロボットアーム3の端部に固定された非接触式測定センサー4、たとえばレーザー測距器によって得ることができる。
前記ロボットアームは、対象となる区域に対して適合化された動き、たとえば直線的なスライドの動きにしたがった一定の速度で前記センサー4を駆動することで、自動的に前記対象となる区域をスキャンする。
ロボットの目印におけるセンサー4の位置を詳しく認識することで、解剖面の再構成が可能となる。
このことは、手術中に器具を変更する必要がないため、ナビゲートされた顕微鏡による処置の際に特に有利である。
この場合、画像の目印とロボットの目印との間の対応付けは、強度、勾配およびその他の特性といった画像の特性に基づく処理アルゴリズムによって行うことができる。
2 処理手段
3 位置決定ロボットアーム
4 器具
5 受容機構
6 視覚化手段
7 ケース
8 回転移動機構
9 固定フランジ
10 支持構造体
10a 垂直アーム
10b 水平アーム
10c 第二の垂直アーム
11 レール支持体
15 ヘッドレスト
16a 区画
16b 関節
17 非接触式センサー
18 視覚化手段
19 機械的ポインター
20 可視マーカー
30 中央ユニット
32 情報入力インターフェース
60 制御モニター
61 通信インターフェース
70 足
71 モーター機構
72 油圧回路
140 支持台
141 立体カメラ
142 光学モジュール
142a 冷光源
143 収束レーザー・モジュール
144 中央レーザー・モジュール
145 シャフト
146 鞘
147 旋回用操作ハンドル
148 支持体
180 ヘッドセット
181 視覚化モニター
Claims (17)
- 神経外科用の多機能ロボット化プラットフォームであり、
・デジタル画像を受信し、処理することのできる処理手段(2)を統合したプランニング・コンソール(1)と、
・アームの複数の区画を有し、該区画の一方が近端部であり他方が遠端部であって、前記各区画が関節によって互いに連結され、アームの遠端部区画が器具(4)を受けるように構成された受容機構(5)を具備し、プランニング・コンソール(1)によって操作される位置決定ロボットアーム(3)と、
・治療すべき解剖区域の画像を取得することに適し、プランニング・コンソール(1)が具備する処理手段(2)に電気的に接続することができ、アームの遠部区画の受容機構(5)に位置付けられ、取り外し可能に固定されることに適している少なくとも一つのビデオ画像取得手段(14)であり、中央光学軸(AA’)を含み、該中央光学軸(AA’)に並べられた中央レーザー・モジュール(144)を統合しており、前記中央レーザー・モジュール(144)が、その外部表面とレーザービームによって指示された最も近い対象との間の距離を測定することに適したレーザー測距器である、ビデオ画像取得手段と、
・手術前および手術中の画像の視覚化手段(6)であって、視覚化すべき画像に固有のビデオ信号を受信するために前記プラニング・コンソール(1)に電気的に接続され、かつ/または画像取得手段(14)に電気的に接続されている手術前および手術中の画像の視覚化手段とを具備し、
前記処理手段(2)が、
・手術前に取得するとともに前記プラニング・コンソール(1)に送信され記憶された第一のデジタル画像に基づき、患者の適切な体の領域を表す第一の三次元デジタルモデルを構築することと、
・手術中に取得するともに前記プラニング・コンソール(1)に送信された 第二のデジタル画像に基づき、同じく患者の適切な体の領域を表す第二の三次元デジタルモデルを構築することと、
・一方および他方のモデルに表されている適切な体の領域の各表示を重ねることで、第一および第二のモデルの対応をとることと、
該対応に応じて、前記位置決定ロボットアームおよび該位置決定ロボットアームが担持する器具(4)とビデオ画像取得手段(14)の軌道の制御とを可能にする
ことを特徴とするプラットフォーム。 - 前記位置決定ロボットアーム(3)に、中央ユニットおよびデータの情報入力インタフェース(32)が接続されていることを特徴とする、請求項1に記載のプラットフォーム。
- 前記位置決定ロボットアーム(3)が、少なくとも6自由度、すなわち3スライド自由度と3回転自由度を有することを特徴とする、請求項1または請求項2に記載のプラットフォーム。
- 前記位置決定ロボットアーム(3)が、力センサーを具備し、使用者が位置決定ロボットアーム(3)の端部を掴んで手動で動かすことができるモードにしたがって作動するように適合化されていることを特徴とする、請求項1〜請求項3のいずれか一つに記載のプラットフォーム。
- 制御モニター(60)と、使用者から手術のプランニング・パラメータを受信するように適合化された通信インタフェース(61)とを備えていることを特徴とする、請求項1〜請求項4のいずれか一つに記載のプラットフォーム。
- 前記処理手段(2)が、手術のプランニング・パラメータおよび解剖学的目印の空間座標に基づいて行われる三次元計算によって、各軌道を画定するように適合化されていることを特徴とする、請求項1〜請求項5のいずれか一つに記載のプラットフォーム。
- 前記器具(4)が、少なくとも一つのガイド、および/または、少なくとも一つの機械的ポインター、および/または、少なくとも一つのレーザーポインター、および/または、少なくとも一つの超音波プローブ、および/または少なくとも一つの測距器を含むことを特徴とする、請求項1〜請求項6のいずれか一つに記載のプラットフォーム。
- 前記器具が、少なくとも一つの外科用機器を含むことを特徴とする、請求項1〜請求項6のいずれか一つに記載のプラットフォーム。
- 前記位置決定ロボットアーム(3)が、その近端部区画によって平行六面体のケース(7)の上部に固定的に設置された方向付け用のタレットに固定され、該ケースが床での回転移動機構および床に対する固定手段を具備することを特徴とする、請求項1〜請求項8のいずれか一つに記載のプラットフォーム。
- 前記ケース(7)が、手術台への固定手段(9、10、11)を備え、該手段が、前記台に対するケースのあらゆる動きを防止することを特徴とする、請求項9に記載のプラットフォーム。
- 前記ケース(7)が、手術台(T)によって担持されている患者の頭部(H)に設置されたヘッドレスト(15)に、堅固に固定する手段を具備することを特徴とする、請求項9に記載のプラットフォーム。
- 治療すべき解剖区域の前記ビデオ画像取得手段(14)が、治療すべき解剖区域の二つの立体ビデオ画像を取得するために二つの立体カメラ(141)を備えていることと、前記視覚化手段(6)が、立体画像の視覚化システムを具備していることを特徴とする、請求項1〜請求項11のいずれか一つに記載のプラットフォーム。
- 前記ビデオ画像取得手段(14)が、光学ケーブルに仲介されるように適合化された光学モジュール(142)を統合しており、該光学ケーブル自体が、冷光源(142a)に接続されていることを特徴とする、請求項12に記載のプラットフォーム。
- 前記ビデオ画像取得手段(14)が、二つのレーザー・モジュール(143)を統合しており、これらのレーザー・モジュールが、立体カメラ(141)の二つの光学軸の交差点となるように調整することに適した一点に収束する可視レーザービームを照射することを特徴とする、請求項12または請求項13に記載のプラットフォーム。
- 前記ビデオ画像取得手段(14)が、その光学軸AA’にしたがった回転によって方向付けるための機械的システム(145、146、147、148)を統合していることを特徴とする、請求項12〜請求項14のいずれか一つに記載のプラットフォーム。
- 一つまたは少なくとも一つの視覚化手段に、拡張現実機能を保証するために仮想要素によって補強された治療すべき解剖区域のビデオ画像が表示されることを特徴とする、請求項1〜請求項15のいずれか一つに記載のプラットフォーム。
- 神経外科用の多機能ロボット化プラットフォームであり、
・デジタル画像を受信し、処理することのできる処理手段(2)を統合したプランニング・コンソール(1)と、
・アームの複数の区画を有し、該区画の一方が近端部であり他方が遠端部であって、前記各区画が関節によって互いに連結され、アームの遠端部区画が器具(4)を受けるように構成された受容機構(5)を具備し、プランニング・コンソール(1)によって操作される位置決定ロボットアーム(3)と、
・治療すべき解剖区域の画像を取得することに適し、プランニング・コンソール(1)が具備する処理手段(2)に電気的に接続することができ、アームの遠部区画の受容機構(5)に位置付けられ、取り外し可能に固定されることに適している少なくとも一つのビデオ画像取得手段(14)であり、中央光学軸(AA’)を含み、該中央光学軸(AA’)に並べられた中央レーザー・モジュール(144)を統合しており、前記中央レーザー・モジュール(144)が、その外部表面とレーザービームによって指示された最も近い対象との間の距離を測定することに適したレーザー測距器であり、
前記ビデオ画像取得手段(14)が、治療すべき解剖区域の二つの立体ビデオ画像を取得するために二つの立体カメラ(141)を備えているとともに、視覚化手段(6)が、立体画像の視覚化システムを具備しており、
かつ、前記ビデオ画像取得手段(14)が、二つのレーザー・モジュール(143)を統合しており、これらのレーザー・モジュールが、前記立体カメラ(141)の二つの光学軸の交差点となるように調整することに適した一点に収束する可視レーザービームを照射する、ビデオ画像取得手段と、
・アームの遠端部区画の受容機構に位置付けられ、取り外し可能に固定されるように適合化された器具(4)、機器およびその他と、
・手術前および手術中の画像の視覚化手段(6)であり、視覚化すべき画像に固有のビデオ信号を受信するためにプランニング・コンソール(1)に電気的に接続され、かつ/または画像取得手段(14)に電気的に接続された視覚化手段、
を具備することを特徴とするプラットフォーム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR0704350A FR2917598B1 (fr) | 2007-06-19 | 2007-06-19 | Plateforme robotisee multi-applicative pour la neurochirurgie et procede de recalage |
| FR0704350 | 2007-06-19 | ||
| PCT/FR2008/000860 WO2009013406A2 (fr) | 2007-06-19 | 2008-06-19 | Plateforme robotisee multi-applicative pour la neurochirurgie et procede de recalage |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010530268A JP2010530268A (ja) | 2010-09-09 |
| JP5190510B2 true JP5190510B2 (ja) | 2013-04-24 |
Family
ID=38988236
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010512739A Expired - Fee Related JP5190510B2 (ja) | 2007-06-19 | 2008-06-19 | 神経外科用多機能ロボット化プラットフォームと位置調整方法 |
Country Status (9)
| Country | Link |
|---|---|
| US (1) | US8509503B2 (ja) |
| EP (1) | EP2157931B1 (ja) |
| JP (1) | JP5190510B2 (ja) |
| AT (1) | ATE499064T1 (ja) |
| CA (1) | CA2691042C (ja) |
| DE (1) | DE602008005143D1 (ja) |
| ES (1) | ES2361717T3 (ja) |
| FR (1) | FR2917598B1 (ja) |
| WO (1) | WO2009013406A2 (ja) |
Families Citing this family (83)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5389483B2 (ja) * | 2009-03-11 | 2014-01-15 | オリンパスメディカルシステムズ株式会社 | 観察装置 |
| WO2011080882A1 (ja) * | 2009-12-28 | 2011-07-07 | パナソニック株式会社 | 動作空間提示装置、動作空間提示方法およびプログラム |
| FR2963693B1 (fr) * | 2010-08-04 | 2013-05-03 | Medtech | Procede d'acquisition automatise et assiste de surfaces anatomiques |
| WO2012088471A1 (en) | 2010-12-22 | 2012-06-28 | Veebot, Llc | Systems and methods for autonomous intravenous needle insertion |
| WO2012101286A1 (en) * | 2011-01-28 | 2012-08-02 | Virtual Proteins B.V. | Insertion procedures in augmented reality |
| US20120226145A1 (en) * | 2011-03-03 | 2012-09-06 | National University Of Singapore | Transcutaneous robot-assisted ablation-device insertion navigation system |
| DE102011005917A1 (de) * | 2011-03-22 | 2012-09-27 | Kuka Laboratories Gmbh | Medizinischer Arbeitsplatz |
| US9308050B2 (en) | 2011-04-01 | 2016-04-12 | Ecole Polytechnique Federale De Lausanne (Epfl) | Robotic system and method for spinal and other surgeries |
| FR2983059B1 (fr) | 2011-11-30 | 2014-11-28 | Medtech | Procede assiste par robotique de positionnement d'instrument chirurgical par rapport au corps d'un patient et dispositif de mise en oeuvre. |
| US9283048B2 (en) | 2013-10-04 | 2016-03-15 | KB Medical SA | Apparatus and systems for precise guidance of surgical tools |
| EP3094272B1 (en) | 2014-01-15 | 2021-04-21 | KB Medical SA | Notched apparatus for guidance of an insertable instrument along an axis during spinal surgery |
| US10039605B2 (en) | 2014-02-11 | 2018-08-07 | Globus Medical, Inc. | Sterile handle for controlling a robotic surgical system from a sterile field |
| KR102435853B1 (ko) * | 2014-03-17 | 2022-08-24 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 진동 감소 장치를 가진 바퀴부착 카트, 그리고 관련 시스템 및 방법 |
| WO2015162256A1 (en) | 2014-04-24 | 2015-10-29 | KB Medical SA | Surgical instrument holder for use with a robotic surgical system |
| CN106999248B (zh) | 2014-06-19 | 2021-04-06 | Kb医疗公司 | 用于执行微创外科手术的系统及方法 |
| WO2016028858A1 (en) * | 2014-08-22 | 2016-02-25 | Intuitive Surgical Operations, Inc. | Systems and methods for adaptive input mapping |
| EP3226781B1 (en) | 2014-12-02 | 2018-08-01 | KB Medical SA | Robot assisted volume removal during surgery |
| JP6034892B2 (ja) * | 2015-01-27 | 2016-11-30 | ファナック株式会社 | ロボットの設置台の輝度が変化するロボットシステム |
| US10013808B2 (en) | 2015-02-03 | 2018-07-03 | Globus Medical, Inc. | Surgeon head-mounted display apparatuses |
| EP3258872B1 (en) | 2015-02-18 | 2023-04-26 | KB Medical SA | Systems for performing minimally invasive spinal surgery with a robotic surgical system using a percutaneous technique |
| EP3267919B1 (en) * | 2015-03-11 | 2023-12-13 | Covidien LP | Surgical robotic cart immobilizer |
| GB2536650A (en) | 2015-03-24 | 2016-09-28 | Augmedics Ltd | Method and system for combining video-based and optic-based augmented reality in a near eye display |
| CN107645924B (zh) | 2015-04-15 | 2021-04-20 | 莫比乌斯成像公司 | 集成式医学成像与外科手术机器人系统 |
| FR3036279B1 (fr) * | 2015-05-21 | 2017-06-23 | Medtech Sa | Robot d'assistance neurochirurgicale |
| AU2015401840B2 (en) * | 2015-07-03 | 2019-05-09 | Ophthorobotics Ag | Intraocular injection system and methods for controlling such a system |
| US10646298B2 (en) * | 2015-07-31 | 2020-05-12 | Globus Medical, Inc. | Robot arm and methods of use |
| US10058394B2 (en) * | 2015-07-31 | 2018-08-28 | Globus Medical, Inc. | Robot arm and methods of use |
| US10687905B2 (en) | 2015-08-31 | 2020-06-23 | KB Medical SA | Robotic surgical systems and methods |
| CN108348299B (zh) * | 2015-09-28 | 2021-11-02 | 皇家飞利浦有限公司 | 远程运动中心机器人的光学配准 |
| US9771092B2 (en) * | 2015-10-13 | 2017-09-26 | Globus Medical, Inc. | Stabilizer wheel assembly and methods of use |
| CN105852970B (zh) * | 2016-04-29 | 2019-06-14 | 北京柏惠维康科技有限公司 | 神经外科机器人导航定位系统及方法 |
| CN114469211A (zh) | 2016-07-12 | 2022-05-13 | 莫比乌斯成像公司 | 多级扩张器与套管系统及方法 |
| KR101848027B1 (ko) | 2016-08-16 | 2018-04-12 | 주식회사 고영테크놀러지 | 정위수술용 수술로봇 시스템 및 정위수술용 로봇의 제어방법 |
| US11103990B2 (en) | 2016-09-16 | 2021-08-31 | Mobius Imaging Llc | System and method for mounting a robotic arm in a surgical robotic system |
| FR3057757B1 (fr) * | 2016-10-21 | 2021-04-16 | Medtech | Dispositif et procede de recalage automatique pour des images intra operatoires 3d |
| WO2018075784A1 (en) | 2016-10-21 | 2018-04-26 | Syverson Benjamin | Methods and systems for setting trajectories and target locations for image guided surgery |
| US11751948B2 (en) | 2016-10-25 | 2023-09-12 | Mobius Imaging, Llc | Methods and systems for robot-assisted surgery |
| US11103311B2 (en) | 2017-03-10 | 2021-08-31 | Biomet Manufacturing, Llc | Augmented reality supported knee surgery |
| TWI634870B (zh) * | 2017-03-20 | 2018-09-11 | 承鋆生醫股份有限公司 | 影像定位及擴增實境系統及其擴增實境方法 |
| US10682129B2 (en) | 2017-03-23 | 2020-06-16 | Mobius Imaging, Llc | Robotic end effector with adjustable inner diameter |
| US11033341B2 (en) | 2017-05-10 | 2021-06-15 | Mako Surgical Corp. | Robotic spine surgery system and methods |
| EP4344658A3 (en) | 2017-05-10 | 2024-07-03 | MAKO Surgical Corp. | Robotic spine surgery system |
| CN107320189A (zh) * | 2017-07-31 | 2017-11-07 | 成都中科博恩思医学机器人有限公司 | 一种机架推手及使用该机架推手的控制台 |
| AU2018316251B2 (en) | 2017-08-11 | 2024-05-02 | Mobius Imaging, Llc | Method and apparatus for attaching a reference marker to a patient |
| US10835288B2 (en) | 2017-09-20 | 2020-11-17 | Medtech S.A. | Devices and methods of accelerating bone cuts |
| US11534211B2 (en) | 2017-10-04 | 2022-12-27 | Mobius Imaging Llc | Systems and methods for performing lateral-access spine surgery |
| EP3691558A4 (en) | 2017-10-05 | 2021-07-21 | Mobius Imaging LLC | METHODS AND SYSTEMS FOR PERFORMING COMPUTER-AIDED SURGERY |
| CA2983780C (en) * | 2017-10-25 | 2020-07-14 | Synaptive Medical (Barbados) Inc. | Surgical imaging sensor and display unit, and surgical navigation system associated therewith |
| US10786311B2 (en) * | 2017-12-22 | 2020-09-29 | Acclarent, Inc. | Apparatus and method for registering facial landmarks for surgical navigation system |
| US20190254753A1 (en) | 2018-02-19 | 2019-08-22 | Globus Medical, Inc. | Augmented reality navigation systems for use with robotic surgical systems and methods of their use |
| CN112236098A (zh) * | 2018-04-12 | 2021-01-15 | 埃因霍温医疗机器人有限公司 | 用于去除骨头的机器人器械 |
| WO2019211741A1 (en) | 2018-05-02 | 2019-11-07 | Augmedics Ltd. | Registration of a fiducial marker for an augmented reality system |
| CN208784914U (zh) * | 2018-05-21 | 2019-04-26 | 华志微创医疗科技(北京)有限公司 | 一种具有立体定向功能的机器人 |
| FR3093310B1 (fr) * | 2019-03-01 | 2021-11-05 | Quantum Surgical | Système d’immobilisation d’un robot médical |
| WO2020065209A1 (fr) * | 2018-09-27 | 2020-04-02 | Quantum Surgical | Robot médical comportant des moyens de positionnement automatique |
| US11766296B2 (en) | 2018-11-26 | 2023-09-26 | Augmedics Ltd. | Tracking system for image-guided surgery |
| US11602402B2 (en) | 2018-12-04 | 2023-03-14 | Globus Medical, Inc. | Drill guide fixtures, cranial insertion fixtures, and related methods and robotic systems |
| US11744655B2 (en) | 2018-12-04 | 2023-09-05 | Globus Medical, Inc. | Drill guide fixtures, cranial insertion fixtures, and related methods and robotic systems |
| CN112888397A (zh) * | 2018-12-26 | 2021-06-01 | 川崎重工业株式会社 | 医疗用台车 |
| JP7209548B2 (ja) * | 2019-01-23 | 2023-01-20 | 三菱重工機械システム株式会社 | 段ロールユニット搬送装置および方法 |
| US11382549B2 (en) | 2019-03-22 | 2022-07-12 | Globus Medical, Inc. | System for neuronavigation registration and robotic trajectory guidance, and related methods and devices |
| US11045179B2 (en) | 2019-05-20 | 2021-06-29 | Global Medical Inc | Robot-mounted retractor system |
| US11980506B2 (en) | 2019-07-29 | 2024-05-14 | Augmedics Ltd. | Fiducial marker |
| US11918307B1 (en) | 2019-11-15 | 2024-03-05 | Verily Life Sciences Llc | Integrating applications in a surgeon console user interface of a robotic surgical system |
| US11931119B1 (en) | 2019-11-15 | 2024-03-19 | Verily Life Sciences Llc | Integrating applications in a surgeon console user interface of a robotic surgical system |
| US11992373B2 (en) | 2019-12-10 | 2024-05-28 | Globus Medical, Inc | Augmented reality headset with varied opacity for navigated robotic surgery |
| US11382712B2 (en) | 2019-12-22 | 2022-07-12 | Augmedics Ltd. | Mirroring in image guided surgery |
| WO2021133186A1 (ru) * | 2019-12-23 | 2021-07-01 | федеральное государственное автономное образовательное учреждение высшего образования "Московский физико-технический институт (национальный исследовательский университет)" | Способ управления роботизированным манипулятором |
| US11464581B2 (en) | 2020-01-28 | 2022-10-11 | Globus Medical, Inc. | Pose measurement chaining for extended reality surgical navigation in visible and near infrared spectrums |
| US11382699B2 (en) | 2020-02-10 | 2022-07-12 | Globus Medical Inc. | Extended reality visualization of optical tool tracking volume for computer assisted navigation in surgery |
| US11207150B2 (en) | 2020-02-19 | 2021-12-28 | Globus Medical, Inc. | Displaying a virtual model of a planned instrument attachment to ensure correct selection of physical instrument attachment |
| US11607277B2 (en) | 2020-04-29 | 2023-03-21 | Globus Medical, Inc. | Registration of surgical tool with reference array tracked by cameras of an extended reality headset for assisted navigation during surgery |
| US11153555B1 (en) | 2020-05-08 | 2021-10-19 | Globus Medical Inc. | Extended reality headset camera system for computer assisted navigation in surgery |
| US11382700B2 (en) | 2020-05-08 | 2022-07-12 | Globus Medical Inc. | Extended reality headset tool tracking and control |
| US11510750B2 (en) | 2020-05-08 | 2022-11-29 | Globus Medical, Inc. | Leveraging two-dimensional digital imaging and communication in medicine imagery in three-dimensional extended reality applications |
| FR3112072B1 (fr) | 2020-07-03 | 2023-08-11 | Squaremind | Dispositif robotique pour le guidage d’un bras robotise |
| US11737831B2 (en) | 2020-09-02 | 2023-08-29 | Globus Medical Inc. | Surgical object tracking template generation for computer assisted navigation during surgical procedure |
| EP4011316A1 (en) * | 2020-12-11 | 2022-06-15 | Ecential Robotics | Surgical robotic system |
| EP4070753A1 (en) | 2021-04-09 | 2022-10-12 | MinMaxMedical | Handle for guiding a robotic arm of a computer-assisted surgery system and a surgical tool held by said robotic arm |
| EP4070752A1 (en) | 2021-04-09 | 2022-10-12 | MinMaxMedical | Computer-assisted surgery system |
| US11896445B2 (en) | 2021-07-07 | 2024-02-13 | Augmedics Ltd. | Iliac pin and adapter |
| CN114143353B (zh) * | 2021-12-08 | 2024-04-26 | 刘春煦 | 一种远程牙科治疗系统及使用方法 |
| WO2024057210A1 (en) | 2022-09-13 | 2024-03-21 | Augmedics Ltd. | Augmented reality eyewear for image-guided medical intervention |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2642269B2 (ja) * | 1992-02-10 | 1997-08-20 | オリンパス光学工業株式会社 | 手術用顕微鏡焦準装置 |
| EP1011424A1 (en) * | 1997-03-03 | 2000-06-28 | Schneider Medical Technologies, Inc. | Imaging device and method |
| JPH10337272A (ja) * | 1997-06-09 | 1998-12-22 | Fuji Photo Film Co Ltd | 生体内距離測定装置 |
| US6231565B1 (en) * | 1997-06-18 | 2001-05-15 | United States Surgical Corporation | Robotic arm DLUs for performing surgical tasks |
| US6033415A (en) * | 1998-09-14 | 2000-03-07 | Integrated Surgical Systems | System and method for performing image directed robotic orthopaedic procedures without a fiducial reference system |
| JP4472085B2 (ja) * | 2000-01-26 | 2010-06-02 | オリンパス株式会社 | 手術用ナビゲーションシステム |
| GB0127659D0 (en) * | 2001-11-19 | 2002-01-09 | Acrobot Company The Ltd | Apparatus and method for registering the position of a surgical robot |
| US7206627B2 (en) * | 2002-03-06 | 2007-04-17 | Z-Kat, Inc. | System and method for intra-operative haptic planning of a medical procedure |
| CA2633137C (en) * | 2002-08-13 | 2012-10-23 | The Governors Of The University Of Calgary | Microsurgical robot system |
| GB0222265D0 (en) * | 2002-09-25 | 2002-10-30 | Imp College Innovations Ltd | Control of robotic manipulation |
| CA2553885C (en) * | 2004-01-13 | 2017-01-03 | Robarts Research Institute | An ultrasound imaging system and methods of imaging using the same |
| FR2871363B1 (fr) * | 2004-06-15 | 2006-09-01 | Medtech Sa | Dispositif robotise de guidage pour outil chirurgical |
| US8339447B2 (en) * | 2004-10-21 | 2012-12-25 | Truevision Systems, Inc. | Stereoscopic electronic microscope workstation |
| EP1855607B1 (en) * | 2005-01-13 | 2017-10-25 | Mazor Robotics Ltd. | Image-guided robotic system for keyhole neurosurgery |
| JP4716747B2 (ja) * | 2005-02-16 | 2011-07-06 | オリンパス株式会社 | 医療用立体画像観察装置 |
| BRPI0616648A2 (pt) * | 2005-09-30 | 2011-06-28 | Restoration Robotics Inc | sistemas automatizados e métodos para colheita e implantação de unidades foliculares |
| US7962192B2 (en) * | 2005-09-30 | 2011-06-14 | Restoration Robotics, Inc. | Systems and methods for aligning a tool with a desired location or object |
| CN101410070B (zh) * | 2006-03-31 | 2012-07-04 | 皇家飞利浦电子股份有限公司 | 图像引导外科系统 |
| CN104688327B (zh) * | 2006-06-13 | 2017-06-09 | 直观外科手术操作公司 | 微创手术系统 |
| WO2007143859A1 (en) * | 2006-06-14 | 2007-12-21 | Macdonald Dettwiler & Associates Inc. | Surgical manipulator with right-angle pulley drive mechanisms |
| US20090036918A1 (en) * | 2006-11-13 | 2009-02-05 | Burgess James E | Method and Apparatus for the Containment of a Surgical Site |
-
2007
- 2007-06-19 FR FR0704350A patent/FR2917598B1/fr not_active Expired - Fee Related
-
2008
- 2008-06-19 AT AT08826611T patent/ATE499064T1/de active
- 2008-06-19 JP JP2010512739A patent/JP5190510B2/ja not_active Expired - Fee Related
- 2008-06-19 EP EP08826611A patent/EP2157931B1/fr active Active
- 2008-06-19 ES ES08826611T patent/ES2361717T3/es active Active
- 2008-06-19 DE DE602008005143T patent/DE602008005143D1/de active Active
- 2008-06-19 WO PCT/FR2008/000860 patent/WO2009013406A2/fr active Application Filing
- 2008-06-19 US US12/452,142 patent/US8509503B2/en active Active
- 2008-06-19 CA CA2691042A patent/CA2691042C/fr not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| CA2691042A1 (fr) | 2009-01-29 |
| US20100137880A1 (en) | 2010-06-03 |
| EP2157931A2 (fr) | 2010-03-03 |
| WO2009013406A2 (fr) | 2009-01-29 |
| EP2157931B1 (fr) | 2011-02-23 |
| FR2917598A1 (fr) | 2008-12-26 |
| DE602008005143D1 (de) | 2011-04-07 |
| FR2917598B1 (fr) | 2010-04-02 |
| ES2361717T3 (es) | 2011-06-21 |
| CA2691042C (fr) | 2012-09-11 |
| WO2009013406A3 (fr) | 2009-04-30 |
| JP2010530268A (ja) | 2010-09-09 |
| ATE499064T1 (de) | 2011-03-15 |
| US8509503B2 (en) | 2013-08-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5190510B2 (ja) | 神経外科用多機能ロボット化プラットフォームと位置調整方法 | |
| JP7443353B2 (ja) | 位置及び方向(p&d)追跡支援の光学的視覚化を使用したコンピュータ断層撮影(ct)画像の補正 | |
| JP4472085B2 (ja) | 手術用ナビゲーションシステム | |
| CA2973606C (en) | Optical targeting and visualization of trajectories | |
| US6850794B2 (en) | Endoscopic targeting method and system | |
| WO2020135785A1 (zh) | 一种手术导航系统 | |
| JP4101951B2 (ja) | 手術用顕微鏡 | |
| JP5121401B2 (ja) | 埋植物距離測定のシステム | |
| JP2020511239A (ja) | ナビゲーション手術における拡張現実ディスプレイのためのシステム及び方法 | |
| CN114711969A (zh) | 一种手术机器人系统及其使用方法 | |
| KR20180104763A (ko) | 영상 안내 수술에서 투시 영상화 시스템의 자세 추정 및 보정 시스템 및 방법 | |
| US20150117601A1 (en) | X-ray source with module and detector for optical radiation | |
| US20070225553A1 (en) | Systems and Methods for Intraoperative Targeting | |
| US20090082784A1 (en) | Interventional medical system | |
| US20220378526A1 (en) | Robotic positioning of a device | |
| JP2001061861A (ja) | 画像撮影手段を備えたシステムおよび医用ワークステーション | |
| WO2010067267A1 (en) | Head-mounted wireless camera and display unit | |
| JP7029932B2 (ja) | 器具類の深さを測定するためのシステム及び方法 | |
| JP2021146218A (ja) | ニューロナビゲーション位置合わせおよびロボット軌道誘導のためのシステム、ならびに関連する方法およびデバイス | |
| JP7323489B2 (ja) | 誘導された生検針の軌道をロボットによりガイダンスするためのシステムと、関連する方法および装置 | |
| CN209826968U (zh) | 一种手术机器人系统 | |
| Adams et al. | An optical navigator for brain surgery | |
| US20200297451A1 (en) | System for robotic trajectory guidance for navigated biopsy needle, and related methods and devices | |
| Kadi et al. | Stereotactic brain surgery: instrumentation, automation, and image guidance | |
| CN118695821A (zh) | 用于将术中图像数据与微创医疗技术集成的系统和方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7426 Effective date: 20100727 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20100727 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20101129 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120710 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121004 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130115 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130128 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160201 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5190510 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |